Изобретение относится к навигационной технике и предназначено, главным образом, для решения проблемы самонаведения кратковременно взаимодействующих малоразмерных летательных аппаратов методом ″погони″ (или так называемым методом ″кривой атаки″).
Известен способ самонаведения ракеты на цель [1], заключающийся в установке остронаправленной антенны на стабилизированной платформе по информации с командного пункта, таким образом, чтобы ось ее равносигнальной зоны совпала с направлением на цель. В начальном процессе самонаведения радиолокатор по команде, поступившей с таймера, совместно с гироскопом измеряет угол отклонения направления на цель от направления равносигнальной зоны антенны. Сигнал ошибки с выхода радиолокатора поступает на устройство управления, корректирующее траекторию движения ракеты.
Известно устройство самонаведения, описанное в [1], которое содержит антенну, радиолокатор, таймер, гироскоп, стабилизированную платформу, мотор начальной установки, угломерный радиодатчик и устройство управления.
Недостатками данного способа и устройства является сложность и громоздкость устройства, содержащего остронаправленную антенну и гироскопический координатор, которые не всегда могут быть реализованы в изделиях ограниченных размеров, в том числе и во многих малоразмерных ракетах. Следовательно, возникает главная проблема - создание устройства самонаведения методом ″погони″ для летательных аппаратов ограниченных размеров, в частности для малоразмерных ракет.
Наиболее близким к изобретению является способ самонаведения ракеты на цель, заключающийся в полете ракеты относительно цели таким образом, чтобы вектор скорости ракеты постоянно был направлен на цель по линии вектора направления «ракета-цель», определении стороны отклонения скорости движения ракеты относительно направления вектора скорости «ракета-цель» за счет разложения суммарной скорости «ракета-цель» на две составляющие: радиальную и тангенциальную, и одновременной оценки радиальной и тангенциальной составляющей суммарной скорости «ракета-цель», при этом относительные величины значений доплеровских частот радиальной и тангенциальной составляющей могут быть между собой либо равными, либо относительно большими, либо относительно меньшими, при этом соответственно будут изменяться отношения напряжений Zi, образованные этими скоростями через доплеровские частоты

где 
Наиболее близкой к изобретению является система самонаведения ракеты на цель, которая содержит антенну, автодинный радиолокатор с двумя выходами, электронный ключ, блок памяти, первый и второй блок вычислений, логическое устройство, устройство управления и таймер, при этом антенна соединена с первым входом радиолокатора, первый выход которого соединен как с первым сигнальным, так и со вторым блокирующим входом электронного ключа, а второй выход радиолокатора соединен с первым входом первого блока вычислений, выход электронного ключа соединен с входом блока памяти и вторым входом первого блока вычислений, выход которого соединен с первым входом второго блока вычисления, выход которого соединен с входом логического устройства, первый и второй выходы которого соединены соответственно с первым и вторым входами устройства управления, выход блока памяти соединен со вторым входом второго блока вычислений, а выход таймера, на вход которого подается внешняя команда ″Пуск″, соединен со вторым входом автодинного радиолокатора, имеющего два выхода рабочих сигналов, образованных соответственно амплитудной и частотной внутренней модуляцией в автодине, а антенна является приемопередающей и слабонаправленной [2].
Недостатком данного устройства является недостаточная точность сопровождения, обусловленная тем, что определяется только сторона отклонения и не определяется динамика отклонения ракеты относительно линии визирования «ракета-цель».
Цель изобретения - повышение точности наведения управляемой ракеты на цель за счет учета динамики отклонения ракеты относительно линии визирования «ракета-цель».
Данная цель достигается в способе самонаведения ракеты на цель, заключающемся в полете ракеты относительно цели таким образом, чтобы вектор скорости ракеты постоянно был направлен на цель по линии вектора направления «ракета-цель», определении стороны отклонения скорости движения ракеты относительно направления вектора скорости «ракета-цель» за счет разложения суммарной скорости «ракета-цель» на две составляющие: радиальную и тангенциальную, и одновременной оценки радиальной и тангенциальной составляющей суммарной скорости «ракета-цель», при этом относительные величины значений доплеровских частот радиальной и тангенциальной составляющей могут быть между собой либо равными, либо относительно большими, либо относительно меньшими, при этом соответственно будут изменяться отношения напряжений Zi, образованные этими скоростями через доплеровские частоты 
где 
Предлагаемый способ реализуется в системе самонаведения ракеты на цель, которая содержащим антенну, автодинный радиолокатор с двумя выходами, электронный ключ, блок памяти, первый и второй блок вычислений, логическое устройство, устройство управления и таймер, при этом антенна соединена с первым входом радиолокатора, первый выход которого соединен как с первым сигнальным, так и со вторым блокирующим входом электронного ключа, а второй выход радиолокатора соединен с первым входом первого блока вычислений, выход электронного ключа соединен с входом блока памяти и вторым входом первого блока вычислений, выход которого соединен с первым входом второго блока вычисления, выход которого соединен с входом логического устройства, первый и второй выходы которого соединены соответственно с первым и вторым входами устройства управления, выход блока памяти соединен со вторым входом второго блока вычислений, а выход таймера, на вход которого подается внешняя команда ″Пуск″, соединен со вторым входом автодинного радиолокатора, имеющего два выхода рабочих сигналов, образованных соответственно амплитудной и частотной внутренней модуляцией в автодине, а антенна является приемопередающей и слабонаправленной, в которую дополнительно введен блок оценки динамики сближения ракеты, который содержит n-пороговых устройств, задатчик сигналов, первый и второй элементы ИЛИ, сдвиговый регистр, n-элементов НЕ, n-триггеров, n-элементов И, n-счетчиков, n-делителей, генератор сигналов, при этом выходы команды «Пуск» и второго блока вычислений соединены соответственно с первым и вторым входами блока оценки динамики сближения ракеты, первый вход которого является вторыми входами сдвигового регистра, n-триггеров и n-счетчиков, а второй вход является первыми входами n-пороговых устройств, вторые входы которых соединены с выходами задатчика сигналов, а выходы n-пороговых устройств соединены с входами первого элемента ИЛИ, выход которого соединен с первым входом сдвигового регистра, третий вход которого соединен с выходом генератора импульсов, нечетные и четные выходы сдвигового регистра соединены соответственно с первыми входами n-триггеров и входами n-элементов НЕ, выходы которых соединены со вторыми входами n-элементов И, первые и третьи входы которых соединены соответственно с выходами триггеров и выходом генератора импульсов, выходы элементов И соединены с первыми входами n-счетчиков, выходы которых соединены с первыми входами делителей, вторые входы которых соединены с выходами n-пороговых устройств, выходы n-делителей соединены с входами второго элемента ИЛИ, выход которого является выходом блока оценки динамики сближения ракеты.
На фиг.1 представлена функциональная схема предлагаемого устройства, где 1 - антенна; 2 - автодинный радиолокатор; 3 - электронный ключ; 4 - блок памяти; 5 - первый блок вычислений; 6 - второй блок вычислений; 7 - логическое устройство; 8 - устройство управления; 9 - таймер, 10 - блок оценки динамики сближения ракеты, который содержит 11 - n-пороговых устройств, 12 - задатчик сигналов, 13, 14 - первый и второй элементы ИЛИ, 15 - сдвиговый регистр, 16 - n-элементов НЕ, 17 - n-триггеров, 18 - n-элементов И, 19 - n-счетчиков, 20 - n-делителей, 21 - генератор сигналов.
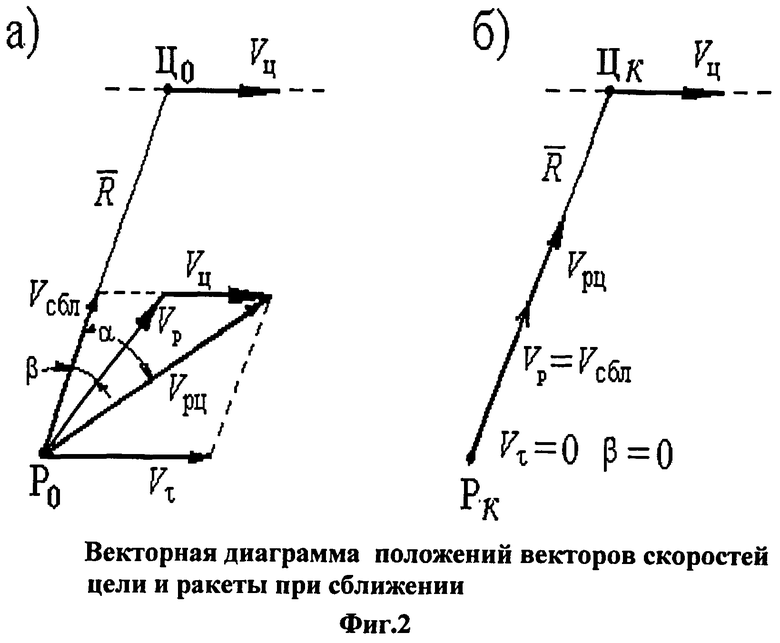
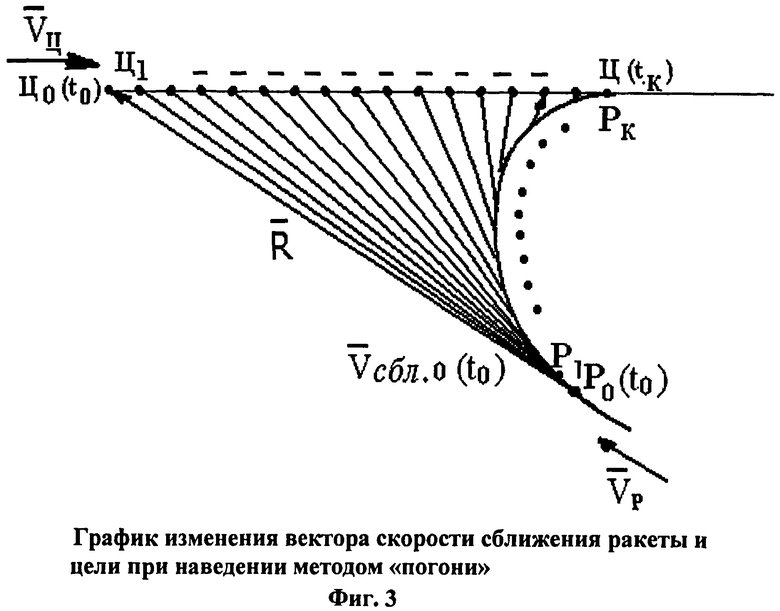
На фиг.2 и 3 графически представлено взаимодействие ракеты (Р) и цели (Ц) методом «погони» в меридиональной плоскости (вдоль строительной оси ракеты).
Система самонаведения ракеты на цель содержит антенну 1, радиолокатор 2, электронный ключ 3; блок 4 памяти; первый 5 и второй 6 блоки вычислений; логическое устройство 7; устройство 8 управления; таймер 9, при этом антенна соединена с первым входом радиолокатора 2, первый выход которого соединен как с первым сигнальным, так и со вторым блокирующим входом электронного ключа 3, а второй выход радиолокатора 2 соединен с первым входом первого блока вычислений 5. Выход электронного ключа 3 соединен с входом блока памяти 4 и вторым входом первого блока вычислений 5, выход которого соединен с первым входом второго блока вычисления 6. Выход второго блока вычислений 6 соединен с входом логического устройства 7, первый и второй выходы которого соединены соответственно с первым и вторым входами устройства управления 8. Выход блока памяти 4 соединен со вторым входом второго блока вычислений 6, а выход таймера 9, на вход которого подается внешняя команда ″Пуск″, соединен со вторым входом автодинного радиолокатора 2.
Блок 10 оценки динамики сближения ракеты содержит n-пороговых устройств 11, задатчик 12 сигналов, первый 13 и второй 14 элементы ИЛИ, сдвиговый регистр 15, n-элементов НЕ 16, n-триггеров 17, n-элементов И 18, n-счетчиков 19, n-делителей 20, генератор сигналов 21, при этом выходы команды «Пуск» и второго 6 блока вычислений соединены соответственно с первым и вторым входами блока 10 оценки динамики сближения ракеты, первый вход которого является вторыми входами сдвигового регистра 15, n-триггеров 17 и n-счетчиков 19, а второй вход является первыми входами n-пороговых устройств 11, вторые входы которых соединены с выходами задатчика 12 сигналов, а выходы n-пороговых устройств 11 соединены с входами первого 13 элемента ИЛИ, выход которого соединен с первым входом сдвигового регистра 15, третий вход которого соединен с выходом генератора 21 импульсов, нечетные и четные выходы сдвигового регистра 15 соединены соответственно с первыми входами n-триггеров 17 и входами n-элементов НЕ 16, выходы которых соединены со вторыми входами n-элементов И 18, первые и третьи входы которых соединены соответственно с выходами триггеров 17 и выходом генератора 21 импульсов, выходы элементов И 18 соединены с первыми входами n-счетчиков 19, выходы которых соединены с первыми входами делителей 20, вторые входы которых соединены с выходами n-пороговых устройств 11, выходы n-делителей 20 соединены с входами второго 14 элемента ИЛИ, выход которого является выходом блока 10 оценки динамики сближения ракеты
Автодинный радиолокатор 2 имеет два выхода рабочих сигналов, образованных соответственно амплитудной и частотной внутренней модуляцией в автодине, а антенна 1 является приемопередающей и слабонаправленной.
Начало работы предлагаемого устройства самонаведения (t0) задается таймером 9 и подачей на его вход внешней команды «Пуск» (фиг.1) (например, при выстреле ракеты). В качестве таймера 9 может быть использован, например, входящий в состав взрывателя ракеты предохранительно-исполнительный механизм (ПИМ) с часовым механизмом [1].
Перед рассмотрением работы предлагаемого устройства сначала приведем некоторые положения.
1) Принимается, что в процессе самонаведения ракеты методом ″погони″ в результате его кратковременности скорость цели Vц и ракеты Vр будут постоянными величинами (Vц=const, Vр=const) и при этом вектор скорости ракеты Vр направлен вдоль ее строительной оси.
2) Известно [3], что при двухточечном самонаведении ракеты на цель методом ″погони″ полет ракеты (Р) относительно цели (Ц) осуществляется таким образом, что вектор скорости ракеты Vр постоянно направлен на цель по линии вектора 
При таком самонаведении угол β (фиг.2), образованный направлением вектора скорости ракеты Vр и направлением линии вектора 
На фиг.2 и 3 графически представлено взаимодействие ракеты (Р) и цели (Ц) методом «погони» в меридиональной плоскости (вдоль строительной оси ракеты).
3) При движении ракеты со скоростью Vр и движении цели со скоростью Vц вектор их суммарной скорости может быть разложен на две составляющие: радиальную и тангенциальную (фиг.2). Радиальная составляющая скорости Vсбл может быть определена традиционным радиолокационным способом [4].
Одновременная оценка радиальной Vсбл и тангенциальной Vτ составляющей суммарной скорости «ракета-цель» Vрц (фиг.2) может производиться по частоте Доплера устройством, описанным, например, в [5].
Известно (см., например, [4]), что вектор радиальной составляющей суммарной скорости сближения объектов Vсбл всегда направлен в сторону цели (фиг.2, а), а частота Доплера Fд.сбл определяется этой скоростью по формуле

где λ - длина волны радиолокационного сигнала радиолокатора.
Частота Доплера 

Из (1) следует, что радиальная составляющая суммарной скорости ракеты и цели Vсбл будет всегда максимальной при условии α0, равной нулю. Но при этом из (2) следует, что при условии α0, равной нулю, т.е. при совмещении векторов суммарной скорости Vрц с вектором ее радиальной составляющей Vсбл, тангенциальная составляющая вектора скорости Vτ будет равна нулю (фиг.2). Такое угловое положение векторов скоростей в пространстве меридиональной плоскости может достигаться изменением направления вектора скорости полета ракеты Vр поворотом положения ее строительной оси, например, аэродинамическим или реактивным способом. Таким образом, параметром рассогласования при управлении ракеты методом ″погони″ становится напряжение сигнала, образованное тангенциальной составляющей суммарной скорости движения ракеты и цели (UFд. τ). Изменением положения продольной оси ракеты в меридиональной плоскости таким образом, чтобы на втором выходе радиолокатора этот сигнал будет отсутствовать (UFд. τ равно нулю), обеспечивается условие движения ракеты методом ″погони″, т.к. при этом угол β становится равным нулю (фиг.2 и 3).
Рассмотрим работу функциональной схемы предлагаемого устройства самонаведения (фиг.1).
По внешней команде ″Пуск″ на вход таймера 9 поступает одиночный сигнал запуска, после чего с выхода таймера 9 на второй вход автодинного радиолокатора 2 поступает сигнал для его включения. Автодинный радиолокатор 2 начинает вырабатывать непрерывный немодулированный сигнал, излучаемый в пространство слабонаправленной приемопередающей антенной 1. При облучении цели этим сигналом отраженный от нее сигнал через антенну 1 поступает на вход автодинного радиолокатора 2.
В рассматриваемом устройстве применяется автодинный радиолокатор 2, структурная схема которого описана в патенте [5]. Этот автодин имеет два выхода сигналов доплеровских частот: на первом выходе - сигнал, образованный радиальной скоростью Vсбл, а на втором выходе - сигнал, образованный тангенциальной составляющей Vτ суммарной скорости «ракета-цель» Vрц. На этих выходах будут соответствующие уровни сигналов: для скорости Vсбл напряжение будет UFд.сбл, а для скорости Vτ напряжение будет UFд. τ, т.е. величина сигнала доплеровской частоты на первом выходе автодинного радиолокатора 2 пропорциональна величине частоты радиальной составляющей вектора суммарной скорости «ракета-цель» Fд.сбл, а на его втором выходе сигнал доплеровской частоты пропорционален величине частоты тангенциальной составляющей вектора суммарной скорости «ракета-цель» Fд τ. С первого выхода автодинного радиолокатора 2 сигнал доплеровской частоты UFд.сбл поступает на первый сигнальный и второй блокировочный входы электронного ключа 3, выход которого соединен с входом блока памяти 4 и вторым входом первого блока вычислений 5, на первый вход которого со второго выхода автодинного радиолокатора 2 поступает сигнал доплеровской частоты тангенциальной составляющей (UFд. τ). Затем электронный ключ 3 самоблокируется (выключается) сигналом UFд.сбл, поступившим с первого выхода автодинного радиолокатора 2. В начальный момент времени работы устройства самонаведения в первом блоке вычислений 5 производится вычитание напряжений двух сигналов: одного - поступающего на его второй вход с выхода электронного ключа 3 



поступающий затем на первый вход второго блока вычислений 6. На второй вход блока вычислителей 6 поступает сигнал первичного измерения доплеровской частоты Fдо.сбл с выхода блока памяти 4 в виде напряжения UFдо.сбл.
Таким образом, на два входа второго блока вычислений 6 поступают соответственно два сигнала: на первый вход поступает сигнал с выхода первого вычислителя 5 как текущее значение 

В зависимости от направления вектора скорости «ракета-цель» Vрц (характеризуемое величиной угла α, см. фиг.3), определяемые, например, направлением скорости движения ракеты Vр, относительные величины значений доплеровских частот Vсбл и Vτ могут быть между собой либо равными, либо относительно большими, либо относительно меньшими, т.е.

Соответственно этому будут изменяться отношения напряжений Zi, образованные этими скоростями через доплеровские частоты UFдо.сбл и

Сигнал Zi с выхода второго блока вычислений 6 поступает на вход логического устройства 7, с выхода которого сигнал поступает только на один из двух его выходов: на первом выходе появится сигнал при условии, если 
Так, например, условие Zi больше 1, означает, что необходимо производить поворот строительной оси ракеты в одну сторону, а условие Zi меньше 1 - производить ее поворот в противоположную сторону.
С одного из двух выходов логического устройства 7 сигнал поступает на соответствующий вход устройства управления 8, чем производится управление поворотом строительной оси ракеты до тех пор, пока не будет выполнено условие отсутствия сигнала, образованного тангенциальной составляющей скорости «ракета-цель», при котором на двух выходах логического устройства 7 сигнала не будет, чем подтверждается проводимый процесс самонаведения ракеты на цель методом ″погони″.
Кроме того дополнительно определяется динамика сближения ракеты с целью. При этом предварительно по команде «Пуск» производится обнуление сдвигового регистра 15, триггеров 17 и n-счетчиков 19 путем подачи сигнала на вторые входы.
С выхода второго 6 блока вычислений сигнал поступает на второй вход блока 10 оценки динамики сближения ракеты с целью и соответственно на первые входы n-пороговых устройств 11, на вторые входы которых поступают сигналы с выходов задатчика 12 сигналов (фиг.1).
В зависимости от величины сигнала, которая определяется динамикой сближения ракеты с цель, происходит срабатывание одного из n-пороговых устройств 11, при этом сигнал через первый 13 элемент ИЛИ поступает на вход сдвигового регистра 15, с четного выхода которого поступает на первый вход одного из триггеров 17, с выхода которого поступает на один из первых входов n-элемента И 18, на второй и третий входы которого поступают сигналы с выхода элемента НЕ 16 и генератора 21 сигналов.
Сигнал с выхода одного из n-элементов И 18 поступает на один из входов n-счетчиков 19 до момента срабатывания следующего одного из n-пороговых устройств 11, при этом сигнал через первый 13 элемент ИЛИ поступает на вход сдвигового регистра 15, с нечетного выхода которого поступает на вход одного из элементов НЕ 16, тем самым снимая сигнал со второго входа элемента И 18.
С выхода одного из n-счетчиков 19 сигнал через один из n-делителей 20, один из входов второго 14 элемента ИЛИ поступает на третий вход устройства 8 управления.
Аналогично процесс продолжается при следующем изменении величины сигнала до момента контактной встречи ракеты с целью. Слабая направленность антенны позволяет обеспечивать правильное наведение ракеты методом ″погони″ даже при случайных колебаниях ее оси относительно цели.
Источники информации
1. Дорофеев А.Н. Взрыватели ракет. М., Военное издательство МО СССР. 1963, стр.86 и др.
2. Патент РФ на изобретение №2466344. Устройство самонаведения. Авторы Климатов Б.М., Смагин В.А.
3. Гуткин Л.С., Борисов Ю.П., Валуев А.А. и др. Радиоуправление реактивными снарядами и космическими аппаратами. / Под общей ред. Л.С. Гуткина. М., Сов. радио, 1968, стр.597, 680.
4. Коган И.М. Ближняя радиолокация. Теоретические основы. М., Сов. радио, 1973, стр.272.
5. Патент №2351946. Автодинное устройство системы ближней радиолокации. Автор Климашов Б.М.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА САМОНАВЕДЕНИЯ НА ЦЕЛЬ МАЛОРАЗМЕРНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2013 |
|
RU2539824C1 |
| УСТРОЙСТВО САМОНАВЕДЕНИЯ | 2011 |
|
RU2466344C1 |
| САМОЛЕТНАЯ ПРИЦЕЛЬНАЯ СИСТЕМА ДЛЯ БЛИЖНЕГО ВОЗДУШНОГО БОЯ | 2013 |
|
RU2542830C1 |
| САМОЛЕТНАЯ ПРИЦЕЛЬНАЯ СИСТЕМА ДЛЯ БЛИЖНЕГО ВОЗДУШНОГО БОЯ | 2013 |
|
RU2544281C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЫ РАКЕТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2332634C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЫ РАКЕТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2292523C2 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЫ РАКЕТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2351889C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМЫХ РАКЕТ | 2013 |
|
RU2539842C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЫ РАКЕТЫ ПРИ НАВЕДЕНИИ НА ЦЕЛЬ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2311605C2 |
| УСТРОЙСТВО САМОНАВЕДЕНИЯ | 2008 |
|
RU2392575C2 |
Изобретение относится к навигационной технике и предназначено для решения проблемы самонаведения кратковременно взаимодействующих малоразмерных летательных аппаратов методом ″погони″. Технический результат - повышение точности наведения. Для этого в полете контролируют вектор скорости ракеты так, чтобы он был направлен на цель по линии вектора направления «ракета-цель», определяют стороны отклонения скорости движения ракеты относительно направления вектора скорости «ракета-цель» на основе разложения суммарной скорости «ракета-цель» на две составляющие: радиальную и тангенциальную, и одновременной оценки радиальной и тангенциальной составляющей суммарной скорости «ракета-цель». При этом относительные величины значений доплеровских частот радиальной и тангенциальной составляющей могут быть между собой либо равными, либо относительно большими, либо относительно меньшими, при этом соответственно будут изменяться отношения напряжений Zi, образованные этими скоростями. 2 н.п. ф-лы, 3 ил.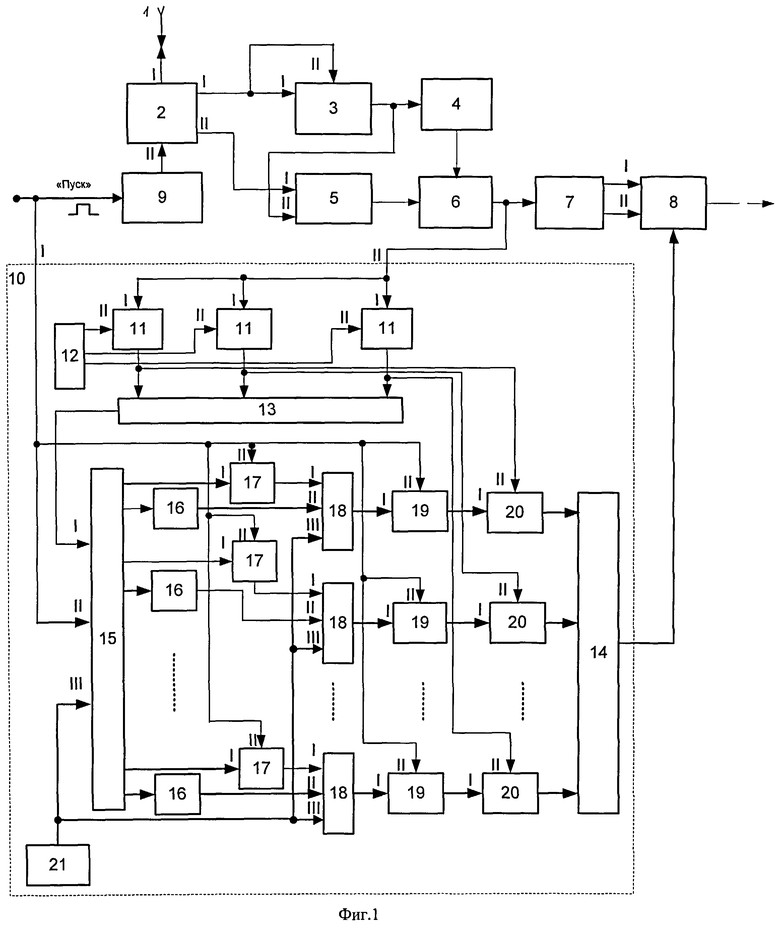
1. Способ самонаведения ракеты на цель заключается в полете ракеты относительно цели таким образом, чтобы вектор скорости ракеты постоянно был направлен на цель по линии вектора направления «ракета-цель», определении стороны отклонения скорости движения ракеты относительно направления вектора скорости «ракета-цель» за счет разложения суммарной скорости «ракета-цель» на две составляющие: радиальную и тангенциальную, и одновременной оценки радиальной и тангенциальной составляющей суммарной скорости «ракета-цель», при этом относительные величины значений доплеровских частот радиальной и тангенциальной составляющей могут быть между собой либо равными, либо относительно большими, либо относительно меньшими, при этом соответственно будут изменяться отношения напряжений Zi, образованные этими скоростями через доплеровские частоты
 ,
,  и
и  ,
,
где  - разностный сигнал, при этом в случае если значения Zi больше 1, необходимо производить поворот строительной оси ракеты в одну сторону, а если условие Zi меньше 1 - производить ее поворот в противоположную сторону, отличающийся тем, что дополнительно анализируют динамику изменения процесса наведения ракеты за счет анализа динамики изменения отношений напряжений и осуществляют изменения управляющего воздействия на исполнительное устройство с учетом динамики сближения ракеты и цели, процесс наведения продолжается до момента контактной встречи ракеты с целью, при этом слабая направленность антенны позволяет обеспечивать наведение ракеты методом ″погони″ даже при случайных колебаниях ее оси относительно цели.
- разностный сигнал, при этом в случае если значения Zi больше 1, необходимо производить поворот строительной оси ракеты в одну сторону, а если условие Zi меньше 1 - производить ее поворот в противоположную сторону, отличающийся тем, что дополнительно анализируют динамику изменения процесса наведения ракеты за счет анализа динамики изменения отношений напряжений и осуществляют изменения управляющего воздействия на исполнительное устройство с учетом динамики сближения ракеты и цели, процесс наведения продолжается до момента контактной встречи ракеты с целью, при этом слабая направленность антенны позволяет обеспечивать наведение ракеты методом ″погони″ даже при случайных колебаниях ее оси относительно цели.
2. Система самонаведения ракеты на цель содержит антенну, автодинный радиолокатор с двумя выходами, электронный ключ, блок памяти, первый и второй блок вычислений, логическое устройство, устройство управления и таймер, при этом антенна соединена с первым входом автодинного радиолокатора, первый выход которого соединен как с первым сигнальным, так и со вторым блокирующим входом электронного ключа, а второй выход автодинного радиолокатора соединен с первым входом первого блока вычислений, выход электронного ключа соединен с входом блока памяти и вторым входом первого блока вычислений, выход которого соединен с первым входом второго блока вычисления, выход которого соединен с входом логического устройства, первый и второй выходы которого соединены соответственно с первым и вторым входами устройства управления, выход блока памяти соединен со вторым входом второго блока вычислений, а выход таймера, на вход которого подается внешняя команда ″Пуск″, соединен со вторым входом автодинного радиолокатора, имеющего два выхода рабочих сигналов, образованных соответственно амплитудной и частотной внутренней модуляцией в автодине, а антенна является приемопередающей и слабонаправленной, отличающаяся тем, что в нее введен блок оценки динамики сближения ракеты, который содержит n-пороговых устройств, задатчик сигналов, первый и второй элементы ИЛИ, сдвиговый регистр, n-элементов НЕ, n-триггеров, n-элементов И, n-счетчиков, n-делителей, генератор сигналов, при этом выходы команды «Пуск» и второго блока вычислений соединены соответственно с первым и вторым входами блока оценки динамики сближения ракеты, первый вход которого является вторыми входами сдвигового регистра, n-триггеров и n-счетчиков, а второй вход является первыми входами n-пороговых устройств, вторые входы которых соединены с выходами задатчика сигналов, а выходы n-пороговых устройств соединены с входами первого элемента ИЛИ, выход которого соединен с первым входом сдвигового регистра, третий вход которого соединен с выходом генератора импульсов, нечетные и четные выходы сдвигового регистра соединены соответственно с первыми входами n-триггеров и входами n-элементов НЕ, выходы которых соединены со вторыми входами n-элементов И, первые и третьи входы которых соединены соответственно с выходами триггеров и выходом генератора импульсов, выходы элементов И соединены с первыми входами n-счетчиков, выходы которых соединены с первыми входами делителей, вторые входы которых соединены с выходами n-пороговых устройств, выходы n-делителей соединены с входами второго элемента ИЛИ, выход которого является выходом блока оценки динамики сближения ракеты.
| АВТОДИННОЕ УСТРОЙСТВО СИСТЕМЫ БЛИЖНЕЙ РАДИОЛОКАЦИИ | 2007 |
|
RU2351946C1 |
| УСТРОЙСТВО САМОНАВЕДЕНИЯ | 2011 |
|
RU2466344C1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ И СИСТЕМА НАВЕДЕНИЯ РАКЕТЫ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2241950C1 |
| ЛАТУХИН А.Н | |||
| "ПРОТИВОТАНКОВОЕ ВООРУЖЕНИЕ" | |||
| М., ВОЕНИЗДАТ, МО СССР, 1974, С.208-235 | |||
| СПОСОБ ФУНКЦИОНИРОВАНИЯ ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЫ РАКЕТЫ ПРИ НАВЕДЕНИИ НА ЦЕЛЬ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2311605C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ИНТЕРПРЕТАЦИИ ИСПЫТАНИЙ СВАБИРОВАНИЕМ С ИСПОЛЬЗОВАНИЕМ НЕЛИНЕЙНОЙ РЕГРЕССИИ | 2008 |
|
RU2474682C2 |
| СИСТЕМА НАВЕДЕНИЯ ПРОТИВОСАМОЛЕТНЫХ РАКЕТ | 2009 |
|
RU2400690C1 |

