Область техники, к которой относится изобретение
Изобретение относится к системам и способам выполнения диагностики и мониторинга двигателей внутреннего сгорания и, в частности, к системам и способам диагностики двигателей, основанным на анализе, по меньшей мере, вибраций двигателя.
Уровень техники
Существуют разнообразные диагностические системы для двигателей внутреннего сгорания, предназначенные для определения уже возникших и возможных отказов в работе таких двигателей. Например, в патенте США №7403580 (Boutin и др.) описана «автоматизированная система диагностики отказов», которая «функционирует на двигательно-компрессорных установках с одним датчиком вибрации на каждую подгруппу цилиндров двигателя и одним датчиком на каждый цилиндр компрессора. Вибрационные сигналы, относящиеся к определенным диапазонам фазового угла коленчатого вала (VT), характеризуют различные события в двигателе и компрессоре. В режиме сбора данных и обучения значения VT сохраняются для каждого события в двигателе и компрессоре при работе в условиях нагрузки, а области порога срабатывания сигнализации определяются с применением теории статистического управления процессами (SPC). Допускается принудительный ввод данных оператором. В отсутствие начальных данных система автоматически входит в режим обучения. С целью мониторинга получают текущие значения VT и сопоставляют текущий режим нагрузки с ранее установленной нагрузкой и сигнализацией, связывающей предварительно заданное событие в двигателе или компрессоре с повышенным или пониженным значением VT. Начальные данные, SPC-анализ, сигнализацию и мониторинг устанавливают в соответствии с расходом через картер, температурой газов на выходе из цилиндра и диагностическими сообщениями системы зажигания. Для сигнализации рабочих характеристик компрессора используют значения температуры и давления на впуске и выпуске». Таким образом, система по Boutin использует вибрационные сигналы, связанные с фазовыми углами коленчатого вала, а в режиме сбора данных и обучения эта система определяет области порога срабатывания сигнализации с применением теории SPC.
Другим примером такой системы является система, описанная в патенте США №4899710 (Takahashi) - «система и способ для обнаружения и определения детонации в двигателе внутреннего сгорания, в котором различные виды сигналов (вибрации двигателя, скорость вращения двигателя, угол открытия дроссельной заслонки, угол поворота коленчатого вала, угол опережения зажигания и т.п.) взвешены посредством векторов весовых коэффициентов с обеспечением формирования сигнала для принятия решения о наличии детонации. Чтобы определить наличие детонации, сигнал для принятия решения о наличии детонации сравнивают с опорным сигналом. О верности или ошибочности результата такого определения судят на основании достоверной информации, касающейся обнаружения детонации, обеспеченной посредством внешнего испытательного устройства. Векторы весовых коэффициентов корректируют в направлении возрастания процентного соотношения правильных ответов в различных режимах работы двигателя. Векторы весовых коэффициентов после корректировки и обучения используют для достоверного определения детонации в различных режимах работы двигателя. Способ возможно применять периодически как часть обычного обслуживания с целью компенсации эффекта старения». Таким образом, система по Takahashi обеспечивает анализ вибраций двигателя, угла поворота коленчатого вала, угла опережения зажигания и т.п.
В патенте США №5745382 (Vilim и др.) раскрыты «способ и система для осуществления наблюдения за нестационарными сигналами от промышленного устройства с целью оценки рабочего состояния. Способ и система включают в себя этапы передачи учебных данных в запоминающее устройство, определение весовых значений нейронной сети до получения выходных сигналов нейронной сети, близких к целевым выходным сигналам. Если целевые выходные величины являются неподходящими, определяют вейвлет-параметры с целью получения выходных сигналов нейронной сети, близких к требуемому множеству целевых выходных сигналов, определяют таким образом характеристики сигналов производственного процесса и сравнивают выходные сигналы нейронной сети с сигналами производственного процесса с целью оценки рабочего состояния производственного процесса». Таким образом, в системе по Vilim для оценки рабочего состояния устройства применяется «нейронно-сетевой» принцип.
В другом патенте США №6456928 (Johnson) предложены «способы и устройства для обнаружения и прогнозирования отклонений параметров и определения состояний отказа в системах, подверженных отказам. В предпочтительном варианте осуществления изобретения реализованы способы для использования в двигателях, включая авиационные, автомобильные и производственные двигатели внутреннего сгорания. Однако предполагаются и другие многочисленные варианты применения. Такие двигатели характеризуются наличием контрольных точек с текущими значениями параметров, причем такие контрольные точки могут соответствовать одиночным физическим датчикам либо виртуальным или воображаемым контрольным точкам, значения параметров которых получены от нескольких датчиков. В изобретении для каждого параметра контрольной точки могут использоваться допустимые диапазоны, пределы и значения. Параметры, лежащие вне допустимых диапазонов, могут рассматриваться как отклонения. Также могут быть предусмотрены группы неопределенности, включающие одно или большее количество состояний отказа либо физические причины отклонений параметров. Отклонения параметров после необязательной фильтрации могут вызывать сигналы отклонений, за которыми может следовать анализ групп неопределенности с целью определения состояния отказа или состояния, вызывающего отклонение. Могут быть рекомендованы режимы работы двигателя, смягчающие состояние отказа. Представлены также способы, обеспечивающие проецирование наблюдаемых тенденций на будущее для прогнозирования отклонений и упреждающее выявление состояний отказа до их фактического возникновения. Одним из предпочтительных вариантов использования этих способов является упреждающее выявление и локализация отказов в авиационных двигателях, что позволяет осуществлять корректирующие действия, включая своевременное профилактическое обслуживание». По мнению авторов настоящего изобретения, системы и способы, упомянутые в патенте США №6456928, представляют собой предпочтительный подход в анализе, который позволяет определять состояние отказа или состояния, вызывающие отклонение от нормального режима.
Поскольку эта область техники жизненно важна не только для автомобильной промышленности, но также и для авиации, соответствующими организациями и компаниями, включая финансируемые NASA, были проведены многочисленные исследовательские работы. В отчете NASA/CR-2002-211485 46, в частности, указано следующее.
«Применение мониторинга вибрации, очевидно, является областью особого внимания в теме, касающейся двигателей, мониторинга и диагностики. Определенные состояния двигателя, такие как износ подшипников, наилучшим образом обнаруживаются посредством мониторинга вибрации. Аппаратные средства AGATE PMDS спроектированы для выборочного получения информации от датчиков вибрации, установленных непосредственно на двигателе, обработки вибрационных данных и определения прогноза на основании этих данных. Исследование под руководством университета, проведенное в соответствии с программой Honeywell AGATE, показало, что в отношении поршневых двигателей возможно использование мониторинга вибрации для обнаружения таких состояний двигателя, как износ подшипников. Однако было обнаружено, что проведение анализа частотного спектра вибрационных данных согласно общепринятым способам мониторинга вибрации оказалось недостаточным и потребовалось также использовать прямую выборку вибрационного временного сигнала. В этом предварительном исследовании для обнаружения состояний двигателя, достаточных для прогнозирования, использовался сигнал в течение одной секунды работы двигателя с частотой 5000 выборок/сек. Необходимо проведение дальнейших научно-исследовательских и опытно-конструкторских работ, прежде чем такие выборочные вибрационные данные смогут использоваться для надежного прогнозирования в отношении двигателей. Принцип PMDS ориентирован на независимое отслеживание характеристик двигателя, обеспечение непрерывной индикации его состояния для пилота с выдачей предупреждений в случае необходимости. Некоторые фрагменты этих данных могут быть доступны наземному техническому персоналу через особый интерфейс. Входами для PMDS являются датчики цифрового контроллера двигателя и другие датчики. На нынешней стадии развития PMDS отслеживает и записывает параметры двигателя и хранит их в базе данных истории двигателя для последующей автономной обработки посредством диагностических алгоритмов...». Несмотря на отсутствие значимых результатов, может быть сделано важное заключение: принцип рядов Фурье, на котором традиционно основан анализ вибрации, признан недостаточным для дальнейшего совершенствования вибрационной диагностики двигателей.
Вышеупомянутые системы и способы имеют определенные недостатки и изъяны. Анализ вибрации в этих системах в первую очередь нацелен на мониторинг старения и износа механизмов, функционально взаимосвязанных друг с другом. Кроме того, большинство способов включает в себя обработку сигналов от двигателя внутреннего сгорания, основанную на нескольких допущениях, которые не вполне отражают действительную нестационарную природу сигналов и процессов в двигателе, вызывающих эти сигналы.
Многие специалисты предпринимали множество попыток анализа таких сигналов, полученных в результате работы отдельных механизмов (например, поршневых колец), причем эти попытки в итоге оказывались неудачными по причине того, что эти сигналы просто терялись в шуме двигателя. Это сформировало общее мнение о возможности осуществления спектрального анализа в отношении только вращающихся частей двигателя, что подразумевает допущение о стационарной природе сигналов.
Другой подход был применен во второй группе диагностических способов, основанных на анализе сигналов во времени. Этот принцип требует высокой квалификации специалистов, а также характеризуется нестабильностью и зависимостью от места и вида контакта.
Раскрытие изобретения
По существу требуется обеспечить: (А) анализ всех или большинства механизмов двигателя (например, анализ работы клапанов, устройств впрыска и т.п.) и определение возможных неисправностей, вызывающих неправильную работу таких механизмов (например, сломанные пружины и т.п.), (В) мониторинг не только термодинамических параметров процесса сгорания, но также динамики сгорания и дисперсности горючей смеси, (С) анализ гидрогазодинамики двигателя и (D) определение функциональных особенностей работы механизмов с целью прогнозирования дальнейшего поведения таких механизмов и выявления любых изменений рисков будущих отказов.
Представляется, что для достижения упомянутых целей следует разрабатывать новые способы представления сигнала в совокупности с вычислительными операциями для их обработки. Особое внимание авторов настоящего изобретения было направлено именно на такие способы и операции. В частности, изобретение относится к новому способу, устройству и компьютерным средствам для предварительной обработки сигналов датчика вибрации (акселерометра).
Как показано выше, традиционные «классические способы» вибродиагностики основаны на амплитудно-частотном анализе с использованием рядов Фурье, иногда также на широкополосной фильтрации, количественном анализе с прослушиванием оператором высокочастотной полосы и т.п. Обычно акселерометр установлен в подходящем месте двигателя и измеряет не только вибрации механических частей двигателя, но также вибрации, на которые влияет акустический поток, вызванный процессами сгорания топливной смеси. Это приводит к росту стохастической компоненты сигнала, поскольку горение является турбулентным процессом, включающим в себя сложные стохастические факторы.
Таким образом, сигнал датчика вибрации (акселерометра) представляет собой комбинацию сигналов, обусловленную, по меньшей мере, двумя составляющими источников вибрации: непосредственно механическими частями («механическая компонента») и акустическими вибрациями, возникающими в результате процесса сгорания («компонента сгорания»). Кроме того, механическая компонента также содержит стохастическую подкомпоненту, на которую влияют силы воздействия, прикладываемые к любой механической части. «Классические способы» не подходят для анализа вибрационного сигнала от двигателя внутреннего сгорания, поскольку они не учитывают нестационарную природу сигнала, квазипериодический характер сигнала (что само по себе является источником диагностической информации) и стохастическую подкомпоненту сгорания. Классическая вибрационная диагностика основана на вполне понятном представлении, принятом специалистами в данной области, с применением «стандартных» математических подходов, не требующих мощных вычислительных ресурсов, в то время как физическая природа стохастической подкомпоненты не может быть описана «стандартным» набором параметров, рассматриваемых классической диагностикой, что в свою очередь создает проблему.
Указанная проблема решена благодаря настоящему изобретению, обеспечивающему новый и неочевидный способ и вычислительные операции для предварительной обработки сигналов акселерометра с учетом упомянутых ранее факторов: нестационарной природы сигнала, квазипериодического характера сигнала и стохастической подкомпоненты сгорания.
В настоящем изобретении обеспечено новое представление сигнала в виде укороченного цикла посредством получения произвольной выборки, зависящей от переменной, представляющей собой угол поворота коленчатого вала двигателя.
В настоящем изобретении обеспечено усовершенствование средств диагностики двигателя, повышение их точности, значительное сокращение стоимости диагностики, повышение доступности диагностического обслуживания для массового потребителя благодаря автоматическому режиму его проведения, использованию типовых недорогих датчиков и цифровых осциллографов, а также простых способов измерения.
В настоящем изобретении реализован способ предварительной обработки сигналов датчика вибрации для диагностики двигателя внутреннего сгорания, содержащего, по меньшей мере, два цилиндра, коленчатый вал, датчик угла поворота коленчатого вала, датчик вибрации, датчик логической метки, причем каждый из них формирует соответствующие сигналы. Способ включает в себя: прием соответствующих сигналов; разделение их на множество циклов; определение положения коленчатого вала с применением стохастической фильтрации, квазинепрерывного представления сигнала, фильтра Калмана, нелинейного стохастического фильтра, на основании характеристик датчика угла поворота коленчатого вала, а также квазинепрерывного представления; определение порождающей функции базиса Рисса на основании технических характеристик датчика вибрации; вторичную дискретизацию сигнала с заменой аргумента; дискретизацию обратной функции; получение дискретного вейвлет-преобразования; получение непрерывного вейвлет-преобразования; получение дискретного вейвлет-преобразования обратной функции и вычисление выходных данных. Двумерные массивы разделяют по предварительно определенным индексам в дискретных преобразованиях и вычисляют эмпирическую функцию распределения вероятностей. Для последующей дополнительной обработки предусмотрено два альтернативных варианта.
Краткое описание чертежей
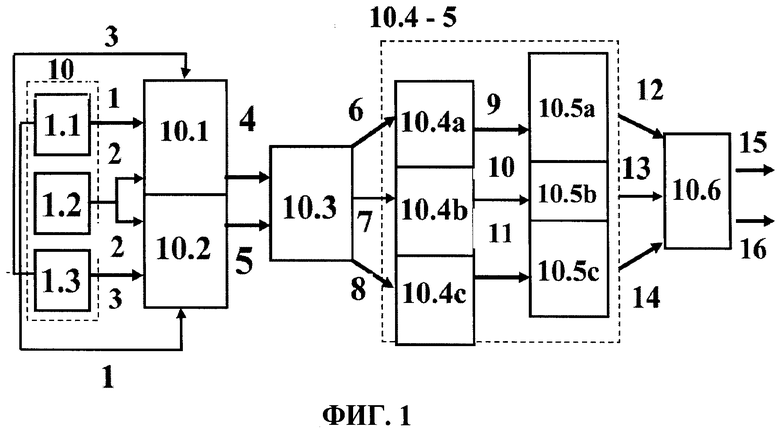
На фиг.1 представлена обобщенная блок-схема, где показан поток сигналов в блоках устройства предварительной обработки согласно одному из вариантов осуществления изобретения.
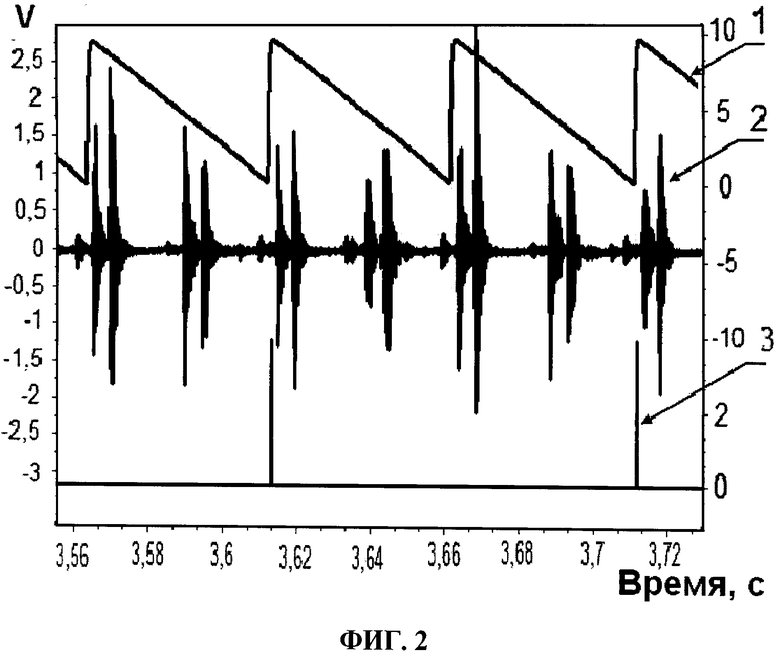
На фиг.2 представлены три временные диаграммы, иллюстрирующие форму сигнала поворота коленчатого вала, сигнала акселерометра и сигнала первого цилиндра, которые вводят в устройство предварительной обработки.
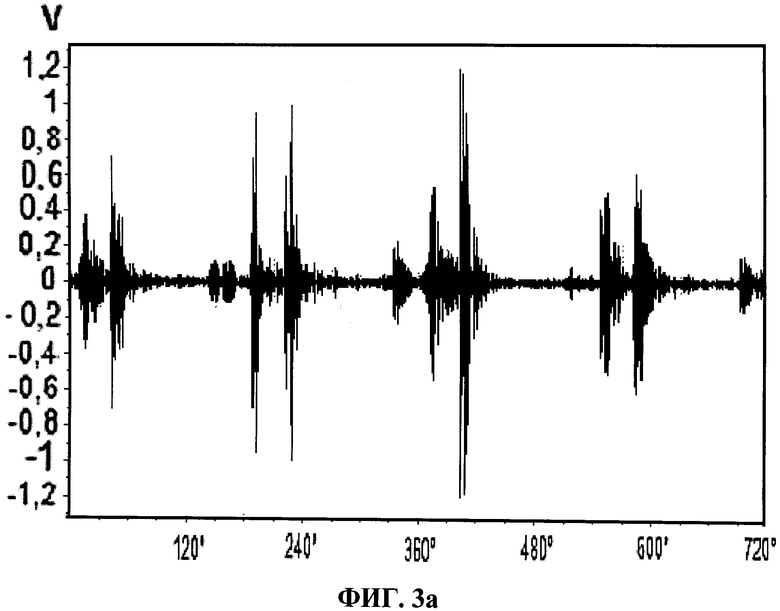
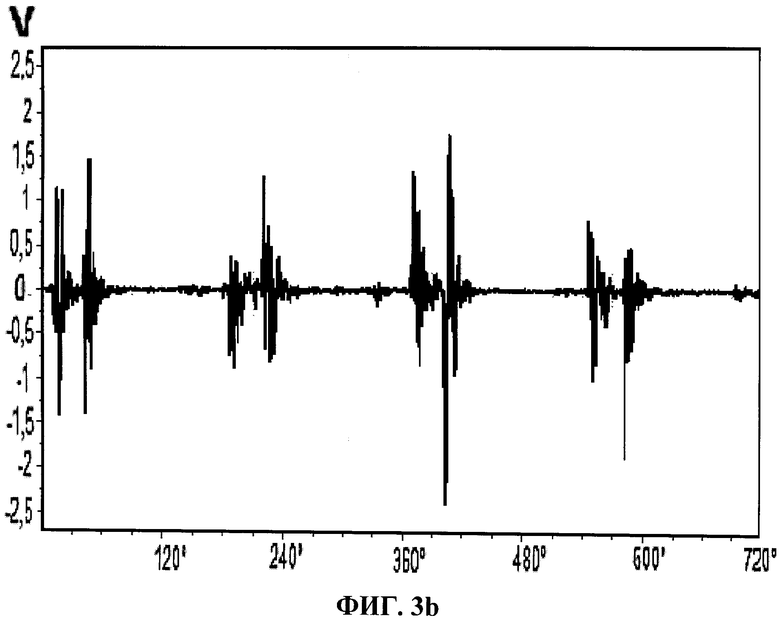
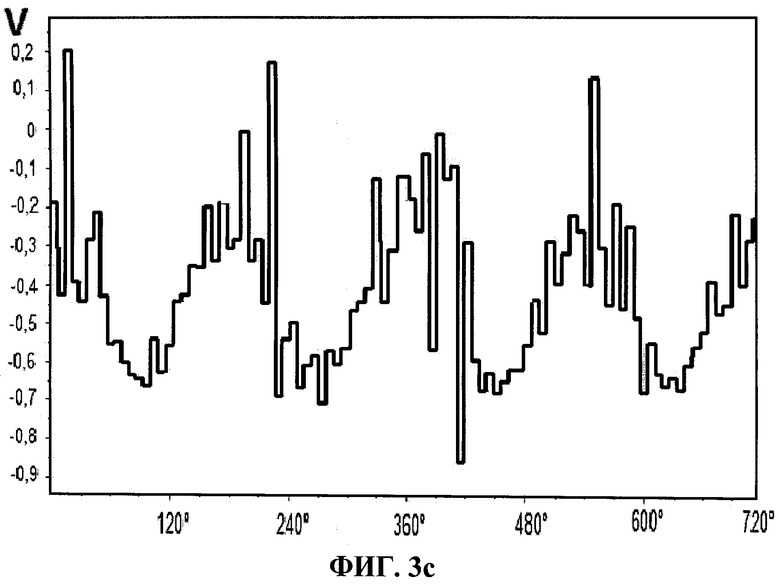
На фиг.3 (a, b, c) представлены графики, изображающие компоненты дискретного вейвлет-разложения для различных масштабов как функции фазы угла поворота коленчатого вала.
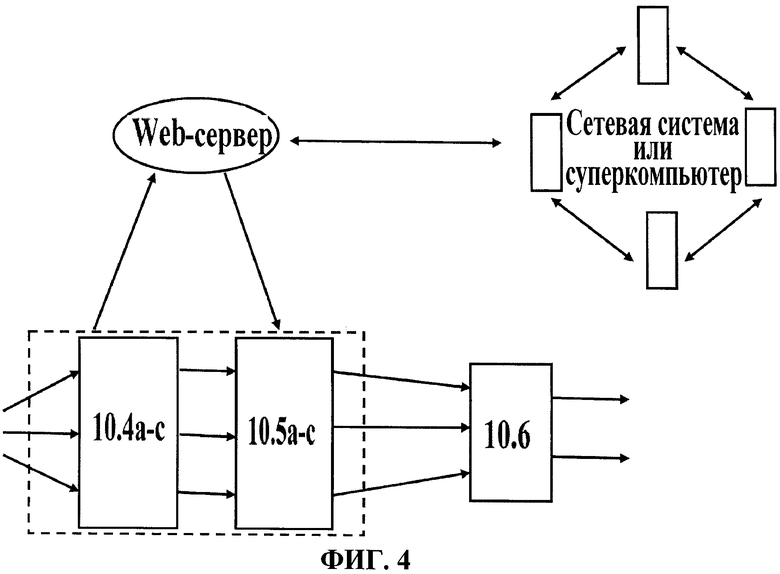
На фиг.4 графически представлена работа устройства предварительной обработки согласно одному из вариантов осуществления настоящего изобретения.
Каждое ссылочное обозначение, приведенное на перечисленных фигурах, относится к элементу устройства или к способу, изложенному далее. Ссылочное обозначение, введенное в тексте первый раз, заключено в скобки.
Осуществление изобретения
Настоящее изобретение может быть выполнено в различных вариантах осуществления, конкретные варианты осуществления настоящего изобретения проиллюстрированы на чертежах и подробно изложены в описании с учетом того, что данное описание следует рассматривать только как пояснение принципов настоящего изобретения на примерах, не ограничивающее объем изобретения иллюстрациями и описанием.
Структура устройства предварительной обработки
На обобщенной блок-схеме фиг.1 показаны, в частности, поток сигналов в блоках заявленного устройства (называемого также устройством предварительной обработки). Устройство предварительной обработки применяют для диагностики двигателя (10) внутреннего сгорания (выделен на фиг.1 штриховой рамкой), содержащего, по меньшей мере, два типовых цилиндра (на чертежах не показаны); типовой коленчатый вал (на чертежах не показан); типовой датчик (1.1) угла поворота коленчатого вала, выполненный с возможностью измерения углов поворота коленчатого вала, причем датчик угла поворота коленчатого вала имеет предварительно определенные технические характеристики, включая импульсную характеристику; типовой датчик (1.2) вибрации, выполненный с возможностью функционирования в качестве акселерометра, измеряющего вибрационное ускорение двигателя, причем указанный датчик вибрации имеет предварительно определенные технические характеристики; и датчик (1.3) метки, формирующий сигнал логической метки, маркирующий предварительно определенную фазу работы любого выбранного (обычно первого) цилиндра двигателя (10) внутреннего сгорания.
Само устройство предварительной обработки содержит: блок (10.1) для получения квазинепрерывного представления сигнала датчика угла поворота коленчатого вала; блок (10.2) для получения квазинепрерывного представления сигнала датчика вибрации; блок (10.3) для вторичной дискретизации временной зависимости сигнала датчика вибрации с заменой аргумента времени на аргумент угла поворота и для вторичной дискретизации обратной функции сигнала датчика угла поворота коленчатого вала; блок (10.4а) для дискретного вейвлет-преобразования сигнала датчика вибрации после вторичной дискретизации сигнала датчика вибрации с заменой аргумента; блок (10.4b) для дискретного вейвлет-преобразования обратной функции, являющейся обратной по отношению к сигналу датчика угла поворота коленчатого вала; блок (10.4с) для непрерывного вейвлет-преобразования сигнала датчика вибрации после вторичной дискретизации датчика вибрационного сигнала с заменой аргумента («времени» на «угол поворота»); блок (10.5а) для вычисления эмпирических функций распределения вероятностей вейвлет-коэффициентов сигнала датчика вибрации; блок (10.5b) для вычисления эмпирических функций распределения вероятностей вейвлет-коэффициентов указанной обратной функции; блок (10.5с) для вычисления двумерной эмпирической функции распределения вероятностей указанных вейвлет-коэффициентов сигнала датчика вибрации и блок (10.6) для диагностики. Блоки 10.4 (a, b, c) и 10.5 (a, b, c) объединены в единый блок (10.4-5). Все указанные блоки соединены согласно фиг.1. Устройство предварительной обработки также содержит предварительно запрограммированное вычислительное средство, по существу, компьютер или распределенную вычислительную сеть (например, компьютерную сетевую систему или суперкомпьютер, как показано на фиг.4), выполняющее некоторое количество предварительно определенных программ, в частности, содержащих программные средства проверки.
Потоки сигналов
Три формы сигналов проиллюстрированы на фиг.2: цифровой сигнал (1) поворота коленчатого вала, формируемый датчиком 1.1 угла поворота коленчатого вала; цифровой сигнал (2), формируемый датчиком 1.2 вибрации и полученный в режиме холостого хода; а также цифровой сигнал (3) логической метки, формируемый датчиком 1.3 метки. Сигналы 1, 2 и 3 вводятся в устройство предварительной обработки для их предварительной обработки.
Указанные сигналы 1, 2, 3 также представлены на фиг.1, на которой дополнительно изображены следующие сигналы: сигнал (4) положения коленчатого вала, полученный в результате квазинепрерывного представления сигнала 1; огибающий вибросигнал (5), полученный в результате квазинепрерывного представления сигнала 2; вибросигнал, разделенный на каналы (6) и (8), полученный после вторичной дискретизации сигнала датчика вибрации с заменой аргумента («времени» на «угол поворота»), представленный значениями угла поворота коленчатого вала; сигнал (7) обратной функции, являющейся обратной по отношению к сигналу датчика угла поворота коленчатого вала, после вторичной дискретизации; сигналы (9) множества фрагментов коэффициентов дискретного вейвлет-преобразования сигнала датчика вибрации; сигналы (11) коэффициентов непрерывного вейвлет-преобразования сигнала датчика вибрации, представленного значениями угла поворота коленчатого вала; сигналы (10) коэффициентов вейвлет-преобразования указанной обратной функции, являющейся обратной по отношению к сигналу датчика угла поворота коленчатого вала; сигнал (12) одномерной эмпирической функции распределения вероятностей коэффициентов вейвлет-преобразования сигнала датчика вибрации; сигнал альтернативной двумерной эмпирической функции (14) распределения вероятностей коэффициентов вейвлет-преобразования сигнала датчика вибрации; сигналы (13) эмпирической функции распределения вероятностей коэффициентов вейвлет-преобразования указанной обратной функции, являющейся обратной по отношению к сигналу датчика угла поворота коленчатого вала; текстово-графическое диагностическое сообщение (15) и выходной сигнал (16) для последующей обработки.
Способ предварительной обработки сигналов
Таким образом, предложенный способ функционирования устройства предварительной обработки включает в себя следующие этапы, осуществляемые в блоке 10.1: этап (a1), на котором три вышеуказанных сигнала 1, 2 и 3 вводят в блок 10.1, затем этап (b1), где при каждом сигнале 3 метки сигнал 2 датчика вибрации делят ("режут") на отдельные циклы, причем каждый цикл соответствует углу 720° поворота коленчатого вала двигателя, как показано на фиг. 2.
Таким образом, формируется множество циклов при фиксированных параметрах (температура двигателя, угол поворота дроссельной заслонки и т.д.) работы двигателя. Этап (c1) включает в себя проверку того, что циклы с переменными параметрами работы двигателя исключены из множества циклов посредством программных средств проверки (например, он не включает в себя циклы переходного режима, в частности, когда меняется положение дроссельной заслонки).
В ходе предварительной обработки сигналов требуется на основании сигнала датчика угла поворота коленчатого вала с максимальной точностью определить фактическое положение коленчатого вала и преобразовать сигнал коленчатого вала таким образом, чтобы замена аргумента времени сигнала датчика вибрации на аргумент угла поворота была возможной без потери информации. Таким образом, следующий этап (d1) предварительной обработки сигнала в блоке 10.1 представляет собой уточнение фактического положения коленчатого вала с использованием стохастической фильтрации и квазинепрерывного представления сигнала датчика угла поворота коленчатого вала с применением функций масштабирования (т.е. на основании аналогов теоремы Уиттакера-Найквиста-Котельникова-Шеннона).
Сигнал 1 датчика угла поворота коленчатого вала представлен в блоке 10.1 как функция дискретного аргумента времени с частотой дискретизации (называемой также частотой выборки) ωfR, определяемой техническими характеристиками датчика. Сигнал датчика угла поворота коленчатого вала является квазипериодическим (т.е. разница между интервалами времени, которые включают в себя поворот коленчатого вала от 0° до 360°, является случайной величиной).
Следующий этап (e1) предварительной обработки сигнала в блоке 10.1 представляет собой уточнение фактического положения коленчатого вала с использованием известного адаптивного фильтра Калмана или нелинейного стохастического фильтра. Таким образом, уравнения фильтра включают в себя динамические уравнения коленчатого вала с крутящим моментом, вызываемым сгоранием топлива. В результате фильтрации действительное положение коленчатого вала выражают в виде функции φ(k) дискретного аргумента времени с частотой выборки ωfR.
Следующая совокупность этапов предварительной обработки сигнала в блоке 10.1 представляет собой формирование квазинепрерывного представления сигнала функции φ(k) которое выполняется в два этапа.
Этап (f1) представляет собой определение порождающей функции базиса Рисса на основании вышеупомянутых технических характеристик датчика угла поворота коленчатого вала и аппроксимации импульсной характеристики датчика угла поворота коленчатого вала с использованием функций масштабирования вейвлет-преобразований или В-сплайн-функций (см. источники: “Wavelets, Approximation and Statistical Applications” W. Hardle, G. Kerkyacharian, D. Picard, A. Tsybakov. Ein erstes Ergebnis des Seminars Berlin-Paris, p.284, 2000, Humboldt-Universit at zu Berlin, Deutschland; Universite Paris VII, France, указанные источники включены в настоящее описание посредством ссылки).
На этапе (g1) выполняется формирование сигнала 4, представляющего собой квазинепрерывное представление сигнала 1, как функции квазинепрерывного аргумента времени; этот этап (g1) заключается в выборе частоты выборки ωc квазинепрерывного аргумента времени и получении квазинепрерывного представления как функции квазинепрерывного аргумента времени согласно формуле:

где Φ(t) - функция квазинепрерывного аргумента времени;
φi,k(t) - порождающая функция базиса Рисса;
i, k, М - целые числа;

Затем сигнал 4, являющийся квазинепрерывным представлением Φ(t) сигнала 1, передается в блок 10.3 для дальнейшей обработки.
Сигнал датчика вибрации является функцией аргумента времени с частотой выборки ωfa. Частоту выборки определяют на основании ранее упомянутых технических характеристик датчика вибрации. Как правило, частоты выборки ωfa и ωfR не равны (обычно ωfa>>ωfR).
Предложенный способ также включает в себя обработку в блоке 10.2. Прежде всего, указанные три сигнала 1, 2 и 3 вводят в блок 10.2 аналогично тому, как это делают на этапе (a1). Блок 10.2 также выполняет квазинепрерывное представление сигнала 2 датчика вибрации. Это происходит в два этапа.
На этапе (а2) определяют порождающую функцию базиса Рисса на основании технических характеристик датчика вибрации и аппроксимации импульсной характеристики с использованием функций масштабирования вейвлет-преобразований или с использованием В-сплайн-функций.
На этапе (b2) вычисляют сигнал 5, являющийся квазинепрерывным представлением сигнала 2, с частотой выборки ωc согласно следующей формуле:
где S(t) - функция квазинепрерывного аргумента времени;
Φi,k(t) - порождающая функция базиса Рисса;
i, k - целые числа;

Затем полученный таким образом сигнал 5, являющийся квазинепрерывным представлением S(t) сигнала 2, передают в блок 10.3 для дальнейшей обработки.
После этого блок 10.3 принимает сигнал 4 и сигнал 5 и выполняет этап (а3), на котором получают сигнал 6 и сигнал 8, оба из которых являются вторичной дискретизацией сигнала 5 датчика вибрации (который является квазинепрерывным представлением сигнала 2) с заменой аргумента («времени» на «угол поворота»); и этап (b3), на котором получают сигнал 7, являющийся вторичной дискретизацией обратной функции (обратной сигналу 4). Это происходит в два подэтапа.
Подэтап (b31) представляет собой определение частоты выборки ωφ сигналов датчика вибрации для аргумента угла поворота
Подэтап (b32) представляет собой определение частоты выборки ωφ сигнала датчика угла поворота коленчатого вала для аргумента угла поворота 

Этим заканчивают процесс вторичной дискретизации сигнала датчика вибрации с заменой аргумента («времени» на «угол поворота»). Вычисленные таким образом значения пар (jh, φi) определяют вторичную дискретизацию обратной функции ti=Φ-1(φi), обратной сигналу 4, с частотой выборки ωφ, т.е.

Затем сигнал S'(φi) датчика вибрации, обозначенный на фиг.1 позициями 6 и 8, и сигнал 7, являющиеся вторичной дискретизацией обратной функции Φ-1(φi) обратной сигналу 4, передают в блок 10.4-5 для дальнейшей обработки.
Блок 10.4-5 (показан на фиг.1) выполняет дальнейшую предварительную обработку сигналов 6, 7 и 8 либо путем передачи сигналов через Интернет (интранет) на серверный компьютер с предварительно определенной вычислительной мощностью, либо путем использования известных методов распараллеливания с последующей обработкой в параллельном процессоре с предварительно определенной вычислительной мощностью (схематически показан на фиг.4).
Следующая совокупность операций предварительной обработки сигнала в блоках 10.4 (а, b, с) такова: на этапе (а4) получают дискретное вейвлет-преобразование (в блоке 10.4а) сигнала 6 (сигнал датчика вибрации после вторичной дискретизации с заменой аргумента) согласно фиг.3 (а, b, с); на этапе (b4) получают непрерывное вейвлет-преобразование (в блоке 10.4с) сигнала 8 (сигнал датчика вибрации после вторичной дискретизации с заменой аргумента) и на этапе (с4) получают дискретное вейвлет-преобразование (в блоке 10.4b) обратной функции, обратной сигналу 4 датчика угла поворота коленчатого вала и формируют выходные данные, включая некоторое количество двумерных массивов предварительно определенных коэффициентов, причем указанные двумерные массивы содержат парные элементы, при этом указанные двумерные массивы представлены сигналом (10). Это происходит в три подэтапа.
Подэтап (с41) (в блоке 10.4а) представляет собой дискретное вейвлет-преобразование сигнала датчика вибрации с представлением выходных данных (т.е. сигнала 9) в виде двумерного массива для масштабных вейвлет-коэффициентов uj,k и в виде двумерного массива для детальных коэффициентов wa,b.
Подэтап (с42) (в блоке 10.4с) представляет собой непрерывное вейвлет-преобразование сигнала датчика вибрации с подэтапом для аргументов масштабирования и для аргументов угла с выходными данными, представленными сигналом 11 в виде двумерного массива вейвлет-коэффициентов wa,b.
Подэтап (с43) (в блоке 10.4b) представляет собой дискретное вейвлет-преобразование с ядром Хаара функции, обратной сигналу 4 датчика угла поворота коленчатого вала, с выходными данными, представленными сигналом 10, в виде двумерного массива для масштабных вейвлет-коэффициентов 

Блоки 10.5а, 10.5b и 10.5с выполняют соответствующий этап (а5) с целью разделения двумерных массивов (т.е. uj,k, wj,k, wa,b,
Nwj,k, Nuj,k, Nwja,b, 

где N=1, 2,… - количество полных циклов двигателя.
Затем в блоках 10.5а и 10.5b выполняют дальнейшую обработку на этапе (b5) с целью вычисления одномерной эмпирической функции распределения вероятностей для каждого элемента двумерных массивов, т.е. wj,k, uj,k, wa,b,
Альтернативно, в блоке 10.5с выполняют дальнейшую обработку на этапе (с5) с целью вычисления двумерной эмпирической функции распределения вероятностей (используемой, например, для обнаружения причины неисправности механизма) для каждой пары элементов двумерных массивов (например, F(wj,k, wl,m), F(uj,k, wl,m), 
Выходные сигналы 12, 13 и 14, соответственно, блоков 10.5а, 10.5b и 10.5с далее передают в блок 10.6.
В вышеописанном алгоритме предварительной обработки учтена нестационарная природа стохастических компонент сигналов, их квазипериодический характер и стохастические компоненты сгорания, что обеспечивает достижение указанных целей настоящего изобретения.
Варианты продолжения диагностики
Диагностическая обработка, описанная далее, является иллюстративным вариантом. Предпочтительно, такую обработку осуществляют в диагностическом блоке 10.6 и она включает в себя: попарное сравнение полученных эмпирических функций распределения вероятностей элементов двумерных массивов (указанных ранее выходных данных в виде сигналов 9, 10, 11) на «похожие интервалы», т.е. интервалы, отличающиеся на величину углового сдвига 

Специфическими особенностями следующих этапов (а6) и (b6) являются: выбор альтернативы этапу (b5); установление множества предварительно определенных эталонных функций распределения вероятностей, причем эти эталонные функции распределения вероятностей имеют предварительно определенные эталонные характеристики, при этом одномерные эмпирические функции распределения вероятностей, полученные на этапе (b5) и представленные сигналами 12 и 13, имеют предварительно определенные структурные характеристики и метрические характеристики; обеспечение хронологической базы данных двигателя и/или механизма двигателя для сохранения предыдущих эмпирических функций распределения вероятностей элементов двумерных массивов, представленных сигналами 9, 10 и 11, которые получены в ходе предыдущих диагностических испытаний двигателя, и предыдущие эмпирические функции распределения вероятностей имеют «предыдущие» структурные и «предыдущие» метрические характеристики. Далее эти этапы описаны более подробно.
На этапе (а6) выполняют попарное сравнение на похожих интервалах на основании вычисления расстояний между эмпирическими функциями распределения вероятностей, полученными на этапе (b5), и представленными сигналами 12 и 13, в рамках следующих известных вероятностных метрических характеристик:
M1. Метрики Леви, определенные как

М2. Метрики, определенные на основании плотности согласно теореме Рэндона-Никодима как

где
М3. Расстояние Махаланобиса.
Вышеуказанное сравнение на этапе (а6) также выполняют, основываясь на вычислении следующих структурных характеристик эмпирической функции распределения вероятностей:
- моментов эмпирических функций распределения вероятностей и их рациональных выражений и
- показателя Херста.
Следующая совокупность операций предварительной обработки сигнала в диагностическом блоке 10.6 представляет собой сравнение полученной эмпирической функции распределения вероятностей элементов двумерного массива, представленной сигналами 12 и 13, с эталонными функциями распределения вероятностей элементов двумерного массива на том же интервале 
На этапе (b6) выполняют сравнение на одинаковых интервалах на основании вычисления расстояний между эмпирическими функциями распределения вероятностей, полученными ранее на этапе (b5) и представленными сигналами 12 и 13, и эталонной функцией распределения вероятностей элементов двумерных массивов, с учетом следующих ранее рассмотренных вероятностных метрических характеристик:
M1. Метрики Леви.
М2. Метрики, основанные на плотности Рэндона-Никодима.
М3. Расстояние Махаланобиса.
Вышеуказанное сравнение также выполняют на основании вычисления предварительно определенных характеристик эмпирической функции распределения вероятностей и характеристик предварительно определенной эталонной функции распределения вероятностей, где предварительно заданы следующие структурные характеристики:
- моменты эмпирической функции распределения вероятностей и их рациональные выражения;
- показатель Херста.
Дальнейшие этапы. На этапе (с6) получают предыдущие структурные характеристики и предыдущие метрические характеристики из предыдущих эмпирических функций распределения вероятностей, хранящихся в хронологической базе данных и полученных в ходе предыдущих диагностических циклов. Иными словами, структурные характеристики извлекают из базы данных.
На этапе (d6) выполняют сравнение на одинаковых интервалах на основании вычисления расстояний между эмпирическими функциями распределения вероятностей, полученными ранее на этапе (b5) и представленными сигналами 12 и 13, с предыдущими эмпирическими функциями распределения вероятностей элементов двумерных массивов, хранящимися в хронологической базе данных, в пределах следующих рассмотренных ранее вероятностных метрических характеристик:
M1. Метрики Леви.
М2. Метрики, основанные на плотности Рэндона-Никодима.
М3. Расстояние Махаланобиса.
Вышеуказанное сравнение на этапе (d6) выполняют на основании вычисления структурных характеристик эмпирической функции распределения вероятностей, полученной ранее на этапе (b5) и представленной сигналами 12 и 13, и структурных характеристик предыдущих функций распределения вероятностей, хранящихся в хронологической базе данных конкретного двигателя и/или механизма, причем структурными характеристиками являются:
- моменты эмпирической функции распределения вероятностей и их рациональные выражения и
- показатель Херста.
Альтернативной совокупностью операций в блоке 10.6 предварительной обработки является: обеспечение хронологической базы данных конкретного двигателя и/или механизма двигателя, причем в базе данных хранят предыдущие двумерные эмпирические функции распределения вероятностей элементов двумерных массивов (выходные данные, представленные сигналами 9, 10 и 11), при этом предыдущие двумерные эмпирические функции распределения вероятностей получены при предыдущих диагностических испытаниях двигателя, а указанные предыдущие двумерные эмпирические функции распределения вероятностей имеют конкретные «предыдущие» структурные и метрические характеристики. В блоке 10.6 также выполняется сравнение полученной двумерной эмпирической функции распределения вероятностей элементов двумерного массива, полученной ранее на этапе (с5) и представленной сигналом 14, с предыдущими эмпирическими функциями распределения вероятностей элементов двумерных массивов, хранящимися в хронологической базе данных.
Такую обработку используют для обнаружения причины неисправности механизма или «диагностики первопричины» и выполняют ее в блоке 10.6, при этом обработка содержит следующие этапы: этап (е6) попарного сравнения (на похожих интервалах) двумерных эмпирических функций распределения вероятностей хронологически упорядоченных парных элементов двумерного массива (сигналы 9, 10 и 11), полученных на этапе (с5) и представленных сигналом 14; этап (f6) сравнения (на одинаковых интервалах) двумерных эмпирических функций распределения вероятностей (представленных сигналом 14) хронологически упорядоченных парных элементов двумерных массивов (сигналы 9, 10 и 11) с эталоном; этап (g6) получения предыдущих структурных характеристик и предыдущих метрических характеристик из предыдущих эмпирических функций распределения вероятностей, хранящихся в хронологической базе данных; этап (h6) сравнения предварительно определенных структурных характеристик и предварительно определенных метрических характеристик, соответственно, с предыдущими структурными характеристиками и предыдущими метрическими характеристиками, полученными на этапе (g6). Этапы (е6), (f6), (g6) и (h6) предусмотрены по аналогии с соответствующими этапами (а6), (b6), (с6) и (d6), описанными ранее. Этапы (е6), (f6), (g6) и (h6) выполняют в следующих целях.
На этапе (е6) выполняют попарное сравнение предварительно определенных структурных характеристик и предварительно определенных метрических характеристик.
На этапе (f6) выполняют сравнение предварительно определенных структурных характеристик и предварительно определенных метрических характеристик с соответствующими предварительно определенными эталонными характеристиками.
На этапе (g6) получают предыдущие структурные характеристики и предыдущие метрические характеристики из предыдущих эмпирических функций распределения вероятностей, хранящихся в хронологической базе данных.
На этапе (h6) выполняют сравнение предварительно определенных метрических характеристик и предварительно определенных структурных характеристик, соответственно, с предыдущими структурными характеристиками и предыдущими метрическими характеристиками, полученными на этапе (g6).
Сравнение на этапах (е6), (f6) и (h6) выполняют на основании вычисления расстояний между двумерными функциями распределения вероятностей и вычисления расстояний между разностью двумерной функции распределения вероятностей и произведением двух одномерных функций распределения вероятностей, т.е.
F(wj,k,wl,m)-F(wj,k)F(wl,m))
и

в пределах рассмотренных ранее вероятностных метрик:
M1. Мерики Леви для двумерных функций и
М2. Метрики, основанные на плотности Рэндона-Никодима.
Указанное сравнение также выполняют на основе вычисления структурных характеристик двумерной эмпирической функции распределения вероятностей, полученной ранее на этапе (b5) и представленной сигналом 14, и структурных характеристик предыдущих двумерных функций распределения вероятностей, хранящихся в хронологической базе данных конкретного двигателя и/или механизма, при этом структурными характеристиками являются моменты высокого порядка двумерной эмпирической функции распределения вероятностей и их рациональные выражения.
Как показано на фиг.1, блок 10.6 вырабатывает текстово-графическое диагностическое сообщение 15 и выходной сигнал 16, который может быть использован для дальнейшего диагностического анализа. Как отмечено ранее, этапы (a6)-(g6) являются необязательными. В альтернативных вариантах осуществления фактическая диагностика может быть осуществлена иным образом.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ЦИЛИНДРОПОРШНЕВОЙ ГРУППЫ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2021 |
|
RU2794138C2 |
| СПОСОБ ПОСТРОЕНИЯ И ОБРАБОТКИ ИЗОБРАЖЕНИЙ И СИСТЕМА ЕГО РЕАЛИЗУЮЩАЯ | 2019 |
|
RU2728949C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ВИБРОАКУСТИЧЕСКОГО АНАЛИЗА ПРОМЫШЛЕННОГО ОБОРУДОВАНИЯ, СОДЕРЖАЩЕГО ВРАЩАЮЩИЕСЯ ЧАСТИ | 2021 |
|
RU2783860C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И ЭКСПЕРТНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2571693C1 |
| СПОСОБ ОБРАБОТКИ ВЕКТОРНЫХ СИГНАЛОВ ДЛЯ РАСПОЗНАВАНИЯ ОБРАЗОВ НА ОСНОВЕ ВЕЙВЛЕТ-АНАЛИЗА | 2017 |
|
RU2690001C1 |
| СИСТЕМА ГОЛОСОВОЙ ИДЕНТИФИКАЦИИ ДИКТОРА | 2009 |
|
RU2385272C1 |
| Способ оптического обнаружения слабоконтрастных динамических объектов на сложном атмосферном фоне | 2015 |
|
RU2634374C2 |
| СПОСОБ ДИАГНОСТИКИ ПРЕДАВАРИЙНЫХ РЕЖИМОВ РАБОТЫ РДТТ ПРИ ОГНЕВЫХ СТЕНДОВЫХ ИСПЫТАНИЯХ | 2014 |
|
RU2542162C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ СЛОЖНЫХ ШИРОКОПОЛОСНЫХ ЧАСТОТНО-МОДУЛИРОВАННЫХ СИГНАЛОВ С ФИЛЬТРАЦИЕЙ В МАСШТАБНО-ВРЕМЕННОЙ ОБЛАСТИ НА ОСНОВЕ ДИСКРЕТНОГО ВЕЙВЛЕТ-ПРЕОБРАЗОВАНИЯ | 2010 |
|
RU2439601C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И ЭКСПЕРТНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2428672C2 |
Изобретение может быть использовано для усовершенствованной диагностики двигателя внутреннего сгорания (ДВС). При реализации способа получают сигналы от датчика угла поворота коленчатого вала (ДУПКВ) ДВС, датчика логической метки (ДЛМ) и датчика вибрации (ДВ). При каждом сигнале ДЛМ разделяют сигнал ДВ на множество циклов, причем каждый цикл соответствует углу 720° поворота коленчатого вала (КВ). Проверяют, что из указанного множества циклов исключены циклы с переменными параметрами. Определяют фактическое положение КВ с использованием стохастической фильтрации и квазинепрерывного представления сигнала ДУПКВ. Определяют фактическое положение КВ с использованием адаптивного фильтра Калмана или нелинейного стохастического фильтра. Определяют порождающую функцию базиса Рисса на основании характеристик ДУПКВ и аппроксимации импульсной характеристики ДВ. Обеспечивают вторичную дискретизацию сигналов с заменой аргумента; дискретизацию обратной функции; получение дискретного вейвлет-преобразования (ВП); получение непрерывного ВП; получение дискретного ВП обратной функции и вычисление выходных данных. Двумерные массивы разделяют по предварительно определенным индексам в дискретных преобразованиях и вычисляют эмпирическую функцию распределения вероятностей. Технический результат - повышение точности диагностирования. 2 з.п. ф-лы, 4 ил.
1. Способ предварительной обработки сигналов датчика вибрации для диагностики двигателя внутреннего сгорания, содержащего: по меньшей мере, два цилиндра, коленчатый вал, датчик угла поворота коленчатого вала, измеряющий углы поворота в указанном двигателе и имеющий предварительно определенные технические характеристики, включая импульсную характеристику, датчик вибрации, измеряющий вибрации указанного двигателя и имеющий предварительно определенные технические характеристики, включая импульсную характеристику, датчик логической метки, отмечающий предварительно определенную фазу работы предварительно определенного цилиндра, выбранного из указанных, по меньшей мере, двух цилиндров; при этом указанный способ включает в себя предварительную обработку сигналов, полученных от указанного двигателя и включающих в себя:
сигнал (1) датчика угла поворота коленчатого вала, сформированный указанным датчиком угла поворота коленчатого вала,
сигнал (2) датчика вибрации, сформированный указанным датчиком вибрации; и
сигнал (3) логической метки, сформированный указанным датчиком логической метки;
причем указанный способ включает в себя следующие этапы:
(a1) получают указанные сигналы (1), (2) и (3), соответственно, от указанного датчика угла поворота коленчатого вала, указанного датчика вибрации и указанного датчика логической метки;
(b1) при каждом сигнале (3) разделяют сигнал (2) на множество циклов, причем каждый цикл соответствует углу 720° поворота коленчатого вала;
(c1) проверяют, что из указанного множества циклов исключены циклы с переменными параметрами;
(d1) определяют фактическое положение указанного коленчатого вала с использованием стохастической фильтрации и квазинепрерывного представления сигнала (1);
(e1) определяют фактическое положение указанного коленчатого вала с использованием адаптивного фильтра Калмана или нелинейного стохастического фильтра;
(f1) определяют порождающую функцию базиса Рисса на основании указанных технических характеристик датчика угла поворота коленчатого вала и аппроксимации указанной импульсной характеристики;
(g1) формируют сигнал (4), являющийся непрерывным представлением сигнала (1);
(а2) определяют порождающую функцию базиса Рисса на основании указанных технических характеристик датчика вибрации и указанной импульсной характеристики датчика вибрации;
(b2) формируют сигнал (5), являющийся квазинепрерывным представлением сигнала (2);
(а3) получают сигнал (6) и сигнал (8), причем оба эти сигнала являются вторичной дискретизацией сигнала (5) с заменой аргумента;
(b3) получают сигнал (7), являющийся вторичной дискретизацией обратной функции, обратной сигналу (4);
(а4) получают дискретное вейвлет-преобразование сигнала (6), причем указанное дискретное вейвлет-преобразование представлено сигналом (9);
(b4) получают непрерывное вейвлет-преобразование сигнала (8), причем указанное непрерывное вейвлет-преобразование представлено сигналом (11);
(с4) получают дискретное вейвлет-преобразование функции, обратной сигналу (4), и формируют выходные данные, включая некоторое количество двумерных массивов предварительно определенных коэффициентов, причем указанные двумерные массивы включают парные элементы и представлены сигналом (10);
(а5) разделяют указанные двумерные массивы по предварительно определенным индексам в дискретном преобразовании этапов (а4) и (с4) и по предварительно определенным индексам в непрерывном преобразовании этапа (b4); и
либо этап (b5), на котором вычисляют одномерную эмпирическую функцию распределения вероятностей для каждого элемента указанных двумерных массивов, причем указанные одномерные эмпирические функции распределения вероятностей представлены сигналами (12) и (13),
либо этап (с5), на котором вычисляют двумерную эмпирическую функцию распределения вероятностей для каждого указанного парного элемента указанных двумерных массивов, причем указанные двумерные эмпирические функции распределения вероятностей представлены сигналом (14);
при этом этап (с5) является альтернативой этапу (b5).
2. Способ по п.1, в котором выбирают этап (b5), устанавливают множество предварительно определенных эталонных функций распределения вероятностей, причем указанные эталонные функции распределения вероятностей имеют предварительно определенные эталонные характеристики; при этом указанные одномерные эмпирические функции распределения вероятностей, полученные на этапе (b5) и представленные сигналами (12) и (13), имеют предварительно определенные структурные характеристики и метрические характеристики; обеспечивают хронологическую базу данных указанного двигателя и/или механизма двигателя с целью хранения предыдущих эмпирических функций распределения вероятностей элементов двумерных массивов, представленных сигналами (9), (10) и (11), полученными при предыдущих диагностических испытаниях указанного двигателя, при этом предыдущие эмпирические функции распределения вероятностей имеют предыдущие структурные характеристики и предыдущие метрические характеристики; при этом способ дополнительно включает в себя следующие этапы:
(а6) попарно сравнивают указанные предварительно определенные структурные характеристики и указанные предварительно определенные метрические характеристики;
(b6) сравнивают указанные предварительно определенные структурные характеристики и указанные предварительно определенные метрические характеристики с соответствующими указанными предварительно определенными эталонными характеристиками;
(с6) получают указанные предыдущие структурные характеристики и указанные предыдущие метрические характеристики из указанных предыдущих эмпирических функций распределения вероятностей, хранящихся в указанной хронологической базе данных; и
(d6) сравнивают указанные предварительно определенные структурные характеристики и указанные предварительно определенные метрические характеристики, соответственно, с указанными предыдущими структурными характеристиками и указанными предыдущими метрическими характеристиками, полученными на этапе (с6).
3. Способ по п.1, в котором выбирают этап (с5); устанавливают множество предварительно определенных эталонных двумерных функций распределения вероятностей, причем указанные эталонные двумерные функции распределения вероятностей имеют предварительно определенные эталонные характеристики; при этом указанные двумерные эмпирические функции распределения вероятностей, полученные на этапе (с5) и представленные сигналом (14), имеют предварительно определенные структурные характеристики и метрические характеристики; обеспечивают хронологическую базу данных указанного двигателя и/или механизма двигателя с целью хранения предыдущих эмпирических двумерных функций распределения вероятностей элементов двумерных массивов, представленных сигналами (9), (10) и (11), полученных при предыдущих диагностических испытаниях указанного двигателя, при этом предыдущие двумерные эмпирические функции распределения вероятностей имеют предыдущие структурные характеристики и предыдущие метрические характеристики; при этом способ дополнительно включает в себя следующие этапы:
(е6) попарно сравнивают указанные предварительно определенные структурные характеристики и указанные предварительно определенные метрические характеристики;
(f6) сравнивают указанные предварительно определенные структурные характеристики и указанные предварительно определенные метрические характеристики с соответствующими указанными предварительно определенными эталонными характеристиками;
(g6) получают указанные предыдущие структурные характеристики и указанные предыдущие метрические характеристики из указанных предыдущих эмпирических функций распределения вероятностей, хранящихся в указанной хронологической базе данных; и
(h6) сравнивают указанные предварительно определенные структурные характеристики и указанные предварительно определенные метрические характеристики, соответственно, с указанными предыдущими структурными характеристиками и указанными предыдущими метрическими характеристиками, полученными на этапе (g6).
| СПОСОБ ВИБРОДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПОРШНЕВЫХ МАШИН ПО СПЕКТРАЛЬНЫМ ИНВАРИАНТАМ | 2007 |
|
RU2337341C1 |
| US 7810469 B2, 12.10.2010 | |||
| Способ диагностики двигателя внутреннего сгорания | 1981 |
|
SU985732A1 |
| Способ отбойки горных пород | 1990 |
|
SU1774156A1 |
| ЛЕНТОПРОТЯЖНЫЙ МЕХАНИЗМ ДЛЯ ЗВУКОЗАПИСЫВАЮЩЕГО И ЗВУКОВОСПРОИЗВОДЯЩЕГО АППАРАТА | 1948 |
|
SU75743A1 |

