Предлагаемая группа изобретений относится к области машиностроения и может использоваться в гусеничных тракторах различных классов, применяемых в качестве базы для агрегатов, выполняющих различные виды работ в промышленном и дорожном строительстве, горнодобывающей отрасли и в сельском хозяйстве.
Известен гусеничный трактор с электрической силовой передачей, содержащий двигатель внутреннего сгорания (ДВС), соединенный генератором, по меньшей мере один тяговый электродвигатель, множество элементов привода, модуль дифференциального механизма поворота, функционально соединенный, по меньшей мере, с одним тяговым электродвигателем и предназначенный для управления крутящим моментом, передаваемым множеству элементов привода, а также гидродвигатель, соединенный с модулем дифференциального управления, и по меньшей мере один силовой электронный модуль, обеспечивающий управление ДВС, тяговым электродвигателем и генератором (US 7950481 В2, B62D 11/00, 31.05.2011; RU 2394701 С2, B60L 11/12, B60K 6/00, 20.07.2010).
На этом тракторе используется гидравлически управляемый дифференциальный механизм поворота, что приводит усложнению силовой передачи (трансмиссии), снижает ее общий КПД и предопределяет невозможность разворота трактора на месте из-за невозможности вращения ведущих колес в противоположных направлениях (противовращения).
Известен также гусеничный трактор с электрической трансмиссией без дифференциального механизма поворота, в котором каждый из двух тяговых электродвигателей выполнен в едином силовом блоке с бортовым редуктором и расположен внутри рамы на единой поперечной оси с бортовым редуктором и ведущим колесом ходовой части. Крупногабаритные тяговые электродвигатели с бортовыми редукторами, не размещаемые полностью внутри рамы трактора, выходят наружу за ее пределы через вырезы в раме трактора. Поворот трактора осуществляется за счет разной скорости вращения валов тяговых электродвигателей по командам электронного блока управления (RU 92844 U1, B62D 25/16, 10.04.2010).
Благодаря этому обеспечивается упрощение конструкции и повышение КПД трансмиссии, а также возможность разворота трактора на месте за счет противовращения ведущих колес.
Однако расположение крупногабаритных тяговых электродвигателей на единой поперечной оси с бортовыми редукторами и ведущими колесами приводит к уменьшению дорожного просвета трактора, поскольку расстояние от осей ведущих колес до днища рамы (корпуса) трактора не может быть меньше радиуса тяговых электродвигателей.
В этом случае для увеличения дорожного просвета необходимо увеличение высоты осей вращения бортовых редукторов и ведущих колес, что приводит к потере контакта нижних ветвей гусениц с грунтом, уменьшению их опорной поверхности и ухудшению тягово-сцепных свойств трактора.
Наиболее близким по технической сущности к предложенному техническому решению и принятым за прототип является гусеничный трактор с электромеханической (электрической) трансмиссией и ходовой частью с изменяемым положением ведущих колес. Он содержит бортовой источник электрической энергии, выполненный в виде ДВС и силового генератора, блок управления (контроллер), установленные в раме трактора, ходовую часть с опорными катками, гусеницами и ведущими колесами, входящими в единый силовой блок с бортовыми редукторами и тяговыми электродвигателями. Силовой блок размещен в отдельном корпусе, установленном на кормовой части трактора и связан с ней посредством гидроцилиндров гидропривода с возможностью поворота на оси, размещенной в раме трактора, и фиксации ведущих колес в верхнем или нижнем положении с опорой гусениц под ведущими колесами на грунт (RU 2696634 C1, B62D 55/12, B60K 17/32, 05.08.2019).
В этом тракторе обеспечивается улучшение тягово-сцепных свойств трактора за счет увеличения опорной поверхности гусениц при опускании силового блока до достижения контакта гусениц под ведущими колесами на грунт. Однако это опускание, по причине расположения тяговых электродвигателей и гидропривода в корпусе трактора, приводит к уменьшению дорожного просвета трактора.
Кроме того, размещение силового блока в отдельном корпусе и его установка на кормовой части трактора с возможностью поворота на оси, размещенной в раме трактора, приводит к существенному увеличению материалоемкости конструкции трактора. Это обусловлено применением отдельного корпуса, а также высокими требованиями к его прочности из-за высоких нагрузок, действующими на этот корпус и на ось его крепления к раме, в том числе при работе трактора с рыхлителем, прикрепленным к этому корпусу.
Из анализа аналогов и прототипа следует, что в предшествующем уровне техники не решена техническая проблема создания гусеничного трактора с электромеханической трансмиссией, отличающегося большим дорожным просветом, повышенной опорной поверхностью гусениц и, соответственно, высокими тягово-сцепными свойствами, а также пониженной материалоемкостью его конструкции. Задачей изобретения является создание такого трактора.
Техническим результатом, обеспечиваемым изобретением, является повышение дорожного просвета и уменьшение материалоемкости конструкции гусеничного трактора с электромеханической трансмиссией без ухудшения его тягово-сцепных свойств.
Под дорожным просветом в данном случае подразумевается расстояние от земли (грунта) до самой нижней части днища рамы трактора, воспринимающей силовые нагрузки и выполняющей функции кузова (корпуса) трактора.
В первом варианте гусеничного трактора с электромеханической трансмиссией, содержащего бортовой источник энергии, тяговые электродвигатели, по меньшей мере один контроллер, раму и ходовую часть с тележками гусениц, опорными катками, гусеницами и ведущими колесами, входящими вместе с бортовыми редукторами и тяговыми электродвигателями по меньшей мере в один силовой блок, указанный технический результат достигается за счет того, что силовые блоки механически соединены с тележками гусениц и не связаны между собой.
Во втором варианте трактора этот технический результат достигается за счет того, что тяговые электродвигатели присоединены к бортовым редукторам с наружной стороны трактора.
В его третьем варианте тот же технический результат достигается за счет того, что контроллер приспособлен для автоматического или автоматизированного управления приводом перемещения силового блока или силовых блоков в вертикальной плоскости с возможностью обеспечения опоры гусениц под ведущими колесами на грунт.
В частных вариантах реализации трактора указанный технический результат достигается также за счет того, что:
- тяговые электродвигатели в силовых блоках присоединены к бортовым редукторам с наружной стороны трактора или со стороны его рамы;
- механическое соединение силовых блоков с рамой или тележками гусениц выполнено либо неподвижным, либо подвижным с использованием цилиндрических шарниров и/или упругих элементов с возможностью перемещения силовых блоков в верхнее или нижнее положение с опорой гусениц под ведущими колесами на грунт;
- оси цилиндрических шарниров, обеспечивающих возможность качания тележек гусениц относительно рамы и поворота силовых блоков относительно тележек гусениц, выполнены совмещенными или раздельными;
- трактор содержит по меньшей мере один гидравлический, или электрогидравлический, или электромеханический привод перемещения по меньшей мере одного силового блока в вертикальной плоскости относительно тележек гусениц или рамы с использованием шарнира, прикрепленного к раме или к тележкам гусениц;
- трактор дополнительно содержит ограничители перемещений и/или устройства фиксации положения силовых блоков в верхнем положении и/или в нижнем положении с опорой гусениц под ведущими колесами на грунт;
- электрические выводы и/или трубопроводы системы охлаждения тяговых электродвигателей размещены внутри полых осей шарниров, приспособленных для подвижного соединения рамы с тележками гусениц;
- трактор содержит по меньшей мере один датчик давления по меньшей мере в одном гидроцилиндре привода, соединенный с контроллером, который выполнен с возможностью вычисления величины давления гусениц на грунт путем обработки выходных сигналов этого датчика и управления приводом в зависимости от результатов этого вычисления. В частности, контроллер приспособлен для управления приводом из условия стабилизации давления гусениц под ведущими колесами на грунт.
Между совокупностью указанных существенных отличительных признаков независимых и зависимых пунктов формулы во всех вариантах изобретения и достигаемым одним и тем же техническим результатом существует прямая причинно-следственной связь.
В том числе механическое соединение силовых блоков с тележками гусениц и исключение механической связи между ними позволяет полностью или частично исключить необходимость размещения силового блока (блоков) внутри рамы (корпуса, кузова, остова) трактора, что обеспечивает повышение его дорожного просвета. В этом случае сохраняется возможность опирания гусениц под ведущими колесами на грунт и исключается необходимость углового перемещения кормовой части трактора относительно его рамы, что уменьшает материалоемкость конструкции трактора и не приводит к ухудшению его тягово-сцепных свойств.
Реализация отличительного признака второго независимого пункта формулы, предусматривающего присоединение тяговых электродвигателей к бортовым редукторам с наружной стороны трактора, позволяет сократить осевую длину силовых блоков (блока) и, соответственно, объем, занимаемый этими блоками (блоком) в раме (корпусе) трактора. Кроме того бортовые редукторы, обращенные внутрь рамы (корпуса), имеют по сравнению с тяговыми электродвигателями, как правило, меньший диаметр. Благодаря этим двум факторам обеспечивает повышение дорожного просвета трактора без ухудшения его тягово-сцепных свойств. При этом исключается необходимость шарнирного соединения кормовой части с рамой трактора, что обеспечивает снижение материалоемкости его конструкции.
В случае реализации отличительного признака третьего независимого пункта формулы изобретения, предусматривающего автоматическое или автоматизированное управление приводом (приводами) перемещения силового блока или силовых блоков в вертикальной плоскости, обеспечивается возможность эффективного опирания гусениц под ведущими колесами на грунт, что приводит к улучшению тягово-сцепных свойств трактора. При этом опускание ведущих колес осуществляется только в случае необходимости, что приводит к увеличению дорожного просвета трактора. Указанное регулирование обеспечивает также возможность предотвратить неоправданно высокое давление гусениц под ведущими колесами на грунт, что также увеличивает дорожный просвет трактора. Одновременно такое управление позволяет снизить максимальные нагрузки на раму (корпус) трактора, что приводит к уменьшению его материалоемкости.
Выбор варианта размещения тяговых электродвигателей в силовых блоках в соответствии с зависимыми пунктами формулы изобретения, а именно, их присоединение к бортовым редукторам с наружной стороны трактора или со стороны его рамы, в каждом конкретном случае позволяет сократить нагрузки на силовые блоки или их осевую длину, что также обеспечивает достижение указанного технического результата.
По этим же причинам достижение этого технического результата достигается за счет выбора рационального присоединения силовых блоков к раме или к тележкам гусениц, выполнение этого соединения либо неподвижным, либо подвижным с использованием цилиндрических шарниров и/или упругих элементов, а также за счет выбора варианта реализации совмещенных или раздельных осей цилиндрических шарниров, обеспечивающих возможность поворота тележек гусениц относительно рамы и силовых блоков относительно тележек гусениц.
Реализация следующего отличительного признака зависимого пункта формулы изобретения, предусматривающего размещение электрических выводов и/или трубопроводов системы охлаждения тяговых электродвигателей внутри полых осей шарниров, приспособленных для подвижного соединения рамы с тележками гусениц, обеспечивает сокращение материалоемкости конструкций трактора без изменения его тягово-сцепных свойств. При этом исключение этих выводов и трубопроводов из кормовой части трактора снижает требования к его внутреннему объему и также приводит к небольшому увеличению дорожного просвета трактора.
Оснащение трактора датчиком (датчиками) давления в гидроцилиндре привода, вычисление с помощью контроллера величины давления гусениц на грунт путем обработки выходных сигналов этого датчика и осуществление управления приводом в зависимости от результатов этого вычисления, в частности, стабилизация давления гусениц под ведущими колесами на грунт, реализованное в соответствии со следующими отличительными признаками зависимых пунктов формулы изобретения, по указанным выше причинам обеспечивает существенное улучшение тягово-сцепных свойств трактора, увеличение дорожного просвета и снижение материалоемкости его конструкции.
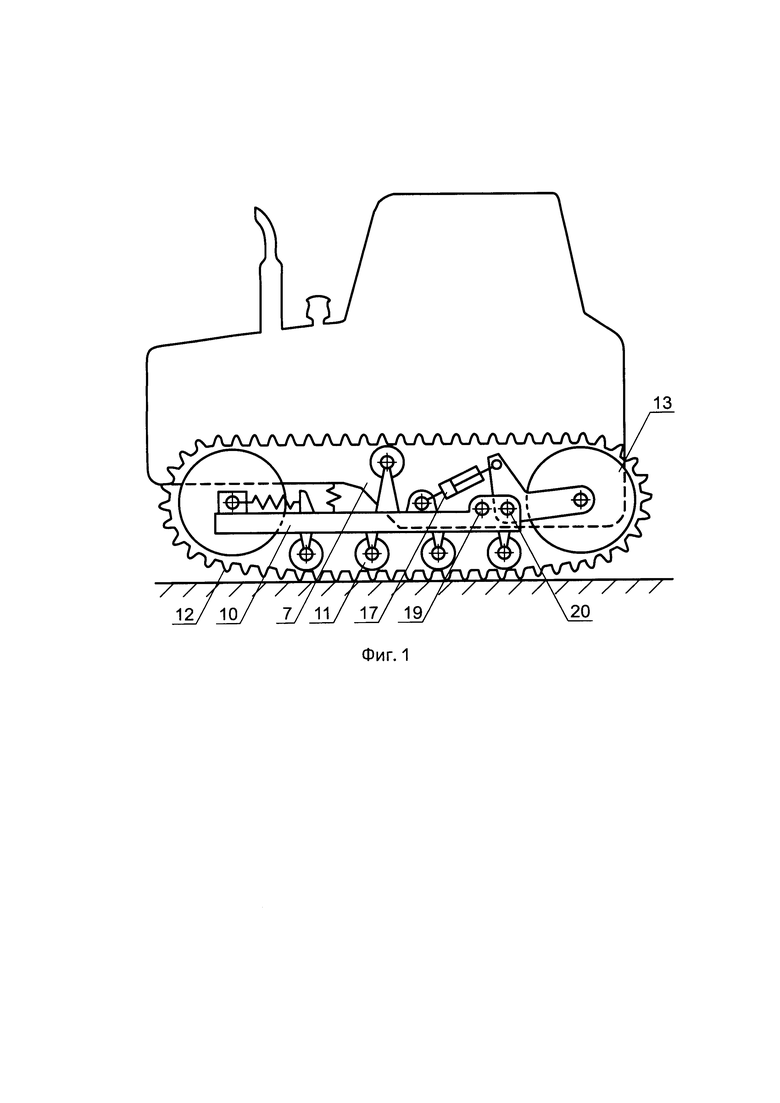
Техническая сущность, промышленная применимость и принцип действия предложенных вариантов гусеничного трактора с электромеханической трансмиссией поясняются чертежами. На фиг. 1 показана ходовая часть трактора с полужесткой подвеской на виде сбоку при ведущих колесах в верхнем положении. На фиг. 2 схематично показано размещение силового блока внутри гусеницы, а на фиг. 3 - общая схема моторно-трансмиссионной установки трактора.
Гусеничный трактор с электромеханической трансмиссией содержит бортовой источник энергии 1, выполненный в виде двигателя внутреннего сгорания (ДВС) 2 и соединенного с ним генератора 3, или аккумуляторной батареи (АКБ), или ДВС с генератором и АКБ, а также тяговые электродвигатели 4, 5, один или несколько контроллеров 6, раму 7, бортовые редукторы 8, 9 и ходовую часть с тележками гусениц 10, опорными катками 11, гусеницами 12 и ведущими колесами 13, 14.
Генератор 3 и тяговые электродвигатели 4, 5 могут быть как вентильно-индукторными (ВИД, ВИГ, ВРД, ВРГ, ВИРД, ВИРГ и т.д.), именуемыми в зарубежной технической литературе как ((Switched Reluctance Motor» (SRM) или ((Switched Reluctance Generator)) (SRG), так и с постоянными магнитам.
Контроллер 6, реализованный преимущественно на основе микроконтроллера и силовых транзисторных ключей, может именоваться также блоком управления, инвертором, частотным преобразователем, электронным блоком и т.п.
Рама трактора 7 является основным узлом несущей системы гусеничного трактора и агрегатов на его базе. Она предназначена для восприятия внешних и внутренних нагрузок, передаваемых на трактор, монтажа его основных узлов и агрегатов, в том числе трансмиссии, системы управления, навесного и прицепного оборудования (бульдозерного, рыхлительного, почвообрабатывающего или иного рабочего оборудования), а также для защиты установленных внутри рамы узлов от механических повреждений. Рама трактора 7 может именоваться также остовом, корпусом, несущим кузовом и т.д.
Подвеска трактора, соединяющая раму (остов) с движителями, может быть жесткой, полужесткой, эластичной (упругой) или смешанной (комбинированной), представляющей собой сочетание полужесткой и упругой подвески, при которой на тележках гусениц полужесткой подвески устанавливают индивидуально подрессоренные опорные катки.
В полужесткой или смешанной подвеске оси качания тележек гусениц относительно рамы (остова) могут совпадать или не совпадать с осями ведущих колес, а поперечные балансиры могут быть с жесткими или с упругими элементами.
Тяговые электродвигатели 4, 5 и бортовые редукторы 8, 9 вместе с ведущими колесами (звездочками) 13, 14 конструктивно объединены и образуют силовые блоки 15, 16, которые могут именоваться также силовыми модулями, мотор-колесами и т.п. Это объединение реализовано путем установки ведущих колес (звездочек) на бортовых редукторах 8, 9, в частности планетарных, а также присоединения тяговых электродвигателей 4, 5 к бортовым редукторам 8, 9 непосредственно или через передаточные устройства, например, муфты.
В состав силовых блоков (модулей, мотор-колес) могут входить стояночные и/или рабочие тормоза с электромеханическим, электрогидравлическим, гидравлическим, электропневматическим, пневматическим или механическим управлением. Например, могут быть установлены гидравлически управляемые нормально замкнутые дисковые стояночные тормоза, автоматически замыкающиеся под действием пружин при отсутствии давления в контуре управления этими тормозами и размыкающиеся при подаче этого давления перед началом движения трактора. Тормоза могут быть установлены внутри боровых редукторов 8, 9, между тяговыми электродвигателями и бортовыми редукторами, а также на свободных концах валов тяговых электродвигателей 4, 5.
В состав силовых блоков 15, 16 могут входить также контроллеры тяговых электродвигателей, тормозные резисторы и другие элементы трансмиссии трактора.
Силовые блоки 15, 16 могут быть механически объединены в единый силовой блок, либо разделены. Они могут быть соединены с тележками гусениц или с рамой трактора жестко, или шарнирно, или через упругие элементы (пружины, рессоры, торсионы, амортизаторы из эластомера и т.п.), или с использованием комбинации шарниров и упругих элементов.
В первом варианте реализации гусеничного трактора силовые блоки 15, 16 механически соединены с тележками гусениц 10 и не связаны между собой (фиг. 1).
Во втором варианте тяговые электродвигатели присоединены к бортовым редукторам с наружной стороны трактора (фиг. 2). При этом тяговые электродвигатели не выступают за наружные края гусениц 12, а бортовые редукторы расположены между этими электродвигателями и рамой трактора 7. Рама трактора при этом может иметь выемки (углубления) на внешней (наружной) поверхности для частичного размещения в них бортовых редукторов, если осевые размеры силовых блоков 15, 16 превышают расстояние от наружного края каждой гусеницы до плоскости рамы 7.
Этот вариант может быть реализован независимо от того, объединены или разъединены силовые блоки левого и правого борта трактора, а также независимо от варианта их крепления на тракторе - к раме или к тележкам гусениц, а также жестко, шарнирно, или через упругие элементы.
Третий вариант реализации трактора подразумевает реализацию автоматического или автоматизированного управления приводом (приводами 17, 18) перемещения силового блока (силовых блоков) в вертикальной плоскости с помощью контроллера 6 для обеспечения опоры гусениц 12 под ведущими колесами 13, 14 на грунт при движении трактора передним ходом. Указанное управление выполнено пропорциональным, что обеспечивает не только перемещение силовых блоков 15, 16 до обеспечения контакта гусениц под ведущими колесами с грунтом, но и регулирование давления этих ветвей гусениц на грунт из условия улучшения тягово-сцепных свойств трактора.
В данном случае автоматическое управление подразумевает работу механизмов подъема и опускания силовых блоков и регулирования величины давления гусениц под ведущими колесами на грунт, в том числе с контролем буксования гусениц, без участия оператора (тракториста).
Автоматизированное управление предполагает частичное участие оператора в управлении (пуск в работу и остановку, задание параметров работы и т.п.). При автоматизированном управлении, в частности, подъем и опускание силовых блоков при смене направления движения трактора могут осуществляться автоматически при сохранении за оператором функции визуального контроля буксования гусениц и ручного регулирования величины давления гусениц на грунт с пульта управления, соединенного с контроллером 6.
Для обеспечения возможности такого управления трактор содержит необходимые датчики и элементы управления приводом (приводами). Алгоритмы такого управления могут быть реализованы как общим контроллером трактора 6, так и с помощью отдельных контроллеров, преимущественно микропроцессорных.
Привод перемещения силовых блоков или одного объединенного силового блока может быть гидравлическим, электрогидравлический или электромеханическим.
Если используется гидравлический или электрогидравлический привод, то контроль величины давления гусениц на грунт под ведущими колесами может быть осуществлен с помощью датчиков давления, установленных в гидроцилиндрах 17 этого привода и соединенных с контроллером. В этом случае используется микропроцессорный контроллер, имеющий вычислительные ресурсы (объем памяти, быстродействие и т.д.), достаточные для вычисления величины давления гусениц на грунт путем обработки выходных сигналов этих датчиков (датчика) с использование математической модели этих узлов трактора, а также для последующего формирования сигналов управления приводом в зависимости от результатов этого вычисления. В частности, из условия стабилизации давления гусениц под ведущими колесами на грунт при движении трактора передним ходом и автоматического подъема силовых блоков (силового блока) при движении трактора задним ходом.
Вариант с автоматическим или автоматизированным управлением приводами также может быть реализован независимо от механического объединения или разъединения силовых блоков левого и правого борта трактора и независимо от варианта их крепления на тракторе - к раме или к тележкам гусениц, жестко, шарнирно, или через упругие элементы, а также независимо от расположения тяговых электродвигателей в силовых блоках - с наружной стороны трактора или между бортовыми редукторами и рамой.
Механическое соединение силовых блоков 15, 16 с рамой 7 или тележками 10 гусениц 12 выполнено либо неподвижным (жестким), либо подвижным с использованием цилиндрических шарниров 18, 19, упругих элементов (пружин, рессор, торсионов, вставок из эластомера и т.п.) или сочетания шарниров и упругих элементов.
Подвижное соединение выполнено с возможностью перемещения силовых блоков 16, 17 в верхнее или нижнее положение до опирания гусениц под ведущими колесами на грунт. При этом оси цилиндрических шарниров 18, 19, обеспечивающих возможность поворота тележек гусениц 10 относительно рамы 7 и силовых блоков относительно тележек гусениц, могут быть выполнены как раздельными (фиг. 1), так и совмещенными (фиг. 2).
Шарниры в зависимости от варианта исполнения трактора и типа подвески могут быть закреплены на раме или на тележках гусениц.
Если силовые блоки закреплены на тележках гусениц, то электрические выводы и/или трубопроводы 21 системы охлаждения тяговых электродвигателей 4, 5 могут быть размещены внутри полых осей шарниров 19, приспособленных для подвижного соединения рамы с тележками гусениц.
Трактор может дополнительно содержат ограничители перемещений, выполненные, например, в виде механических упоров, а также устройства фиксации положения силовых блоков в их крайних положениях - в верхнем, нижнем или в обоих положениях.
Цепи управления фиксаторами, реализованными, например, в виде электрически или гидравлически управляемых замков (стопоров), соединены с контроллером 6. Возможно также применение фиксаторов с ручным механическим управлением.
Предложенный гусеничный трактор работает следующим образом.
ДВС 2 вращает вал генератора 3. Вырабатываемая им электрическая энергия передается на контроллер (блок управления) 6. Контроллер в соответствии с программой его работы после получения команд от оператора (тракториста) формирует импульсы или переменное напряжение, поступающее на фазные обмотки тяговых электродвигателей 4, 5, приводящих во вращение выходные валы бортовых редукторов 8, 9 планетарного типа и ведущие колеса 13, 14 ходовой части трактора, приводя его в движение.
Контроллер 6 и тяговые электродвигатели 4, 5 обеспечивают бесступенчатое регулирование тягового усилия и скорости движения работающего трактора, а также его повороты и разворот на месте за счет задания различных, в том числе противоположных скоростей вращения валов тяговых электродвигателей по командам оператора (тракториста).
При движении трактора передним ходом оператор в зависимости от характера разрабатываемого грунта подает команду на контроллер 6, который согласно программе его работы, предварительно записанной в его энергонезависимой памяти, формирует сигналы управления приводами 18, 17, опуская силовые блоки с ведущими колесами 13, 14 ходовой части трактора до обеспечения контакта с грунтом гусениц под этим колесами. Одновременно, в случае реализации автоматического или автоматизированного управления приводом, осуществляется регулирование давления этих частей гусениц на грунт, в частности с учетом их буксования, что обеспечивает улучшение тягово-сцепных свойств трактора.
Если приводы 17, 18 отсутствуют, а силовые блоки 15, 16 имеют шарнирное или упругое соединение с рамой трактора или с тележками гусениц, то подъем и опускание силовых блоков осуществляется за счет сил натяжения гусениц. При этом с целью исключения влияния колебаний этих сил на положение силовых блоков, они могут быть автоматически или по команде оператора зафиксированы в крайних положениях.
Например, при движении трактора вперед силы натяжения нижних ветвей гусениц прижимают ведущие колеса с гусеницами к грунту, а при движении назад поднимают их. Это дает возможность ограничится установкой ограничителей и фиксаторов положения силовых блоков без использования управляемых приводов.
Обеспечение дополнительной опоры в виде опущенных на грунт участков гусениц 12 под ведущими колесами приводит к удлинению опорной поверхности гусениц, к повышению тягово-сцепных свойств трактора и к смещению центра тяжести тракторного агрегата относительно удлиненной опорной поверхности, что приводит к повышению устойчивости трактора. Увеличение опорной поверхности гусениц приводит также к снижению удельного давления гусениц на грунт, к уменьшению деформации грунта и к соответствующему увеличению дорожного просвета трактора.
Движение трактора назад без нагрузки, движение вперед при превышении заданной рабочей скорости, в том числе в транспортном режиме, осуществляются при поднятых силовых блоках и, соответственно ведущих колесах трактора.
Торможение трактора осуществляется тяговыми электродвигателями с передачей энергии торможения в ДВС, АКБ или в тормозные резисторы, а также с помощью тормозов, встроенных в силовые блоки 15, 16.
Для специалистов в данной области техники понятно, что кроме описанных вариантов гусеничного трактора с электромеханической трансмиссией возможны также иные варианты его реализации на основе признаков, изложенных в формуле изобретения.

Изобретение относится к гусеничным тракторам с электромеханической трансмиссией. Гусеничный трактор с электромеханической трансмиссией содержит бортовой источник энергии (1), тяговые электродвигатели (2, 3), контроллер (6), раму (7) и ходовую часть с тележками гусениц (10), опорными катками (11), гусеницами (12) и ведущими колесами (13, 14), входящими вместе с бортовыми редукторами (8, 9) и тяговыми электродвигателями в один или несколько силовых блоков (15, 16). На тракторе силовые блоки механически могут быть соединены с тележками гусениц и не связаны между собой или тяговые электродвигатели присоединены к бортовым редукторам с наружной стороны трактора или контроллер выполнен с возможностью реализации автоматического или автоматизированного управления приводами перемещения силовых блоков (блока) (17, 18) в вертикальной плоскости с возможностью опоры гусениц под ведущими колесами на грунт. Тяговые электродвигатели (4, 5) в силовых блоках могут быть присоединены к бортовым редукторам (8, 9) с наружной стороны трактора или со стороны его рамы (7) и могут быть соединены с рамой или тележками гусениц. Это соединение может быть выполнено либо неподвижным, либо подвижным с использованием цилиндрических шарниров и/или упругих элементов. Оси шарниров (19, 20), обеспечивающих поворот тележек гусениц относительно рамы и силовых блоков относительно тележек гусениц, могут быть выполнены совмещенными или раздельными. Электрические выводы и трубопроводы системы охлаждения (21) тяговых электродвигателей могут быть размещены внутри полых осей шарниров, соединяющих раму (7) с тележками гусениц (10). Трактор может содержать датчики давления в гидроцилиндрах привода, использующиеся контроллером (6) для вычисления давления гусениц (12) на грунт и последующего управления приводами (17, 18) из условия стабилизации этого давления. Достигается повышение дорожного просвета и уменьшение материалоемкости конструкции гусеничного трактора с электромеханической трансмиссией. 2 н. и 13 з.п. ф-лы, 3 ил.
1. Гусеничный трактор с электромеханической трансмиссией, содержащий бортовой источник энергии, тяговые электродвигатели, по меньшей мере один контроллер, раму и ходовую часть с тележками гусениц, опорными катками, гусеницами и ведущими колесами, входящими вместе с бортовыми редукторами и тяговыми электродвигателями по меньшей мере в один силовой блок, отличающийся тем, что тяговые электродвигатели присоединены к бортовым редукторам с наружной стороны трактора.
2. Трактор по п. 1, отличающийся тем, что по меньшей мере один силовой блок имеет неподвижное соединение с рамой или по меньшей мере с одной тележкой гусениц.
3. Трактор по п. 1, отличающийся тем, что по меньшей мере один силовой блок соединен с рамой или тележкой гусениц с помощью по меньшей мере одного шарнира и/или упругого элемента с возможностью перемещения по меньшей мере одного силового блока в верхнее или нижнее положение с опорой гусениц под ведущими колесами на грунт.
4. Трактор по п. 3, отличающийся тем, что электрические выводы и/или трубопроводы системы охлаждения тяговых электродвигателей размещены внутри полых осей шарниров, приспособленных для подвижного соединения рамы с тележками гусениц.
5. Трактор по п. 3, отличающийся тем, что он дополнительно содержит по меньшей мере один гидравлический, или электрогидравлический, или электромеханический привод перемещения по меньшей мере одного силового блока в вертикальной плоскости относительно рамы или тележек гусениц.
6. Трактор по п. 5, отличающийся тем, что контроллер приспособлен для автоматического или автоматизированного управления по меньшей мере одним приводом с возможностью обеспечения опоры гусениц под ведущими колесами на грунт.
7. Трактор по одному из пп. 1-6, отличающийся тем, что он дополнительно содержит ограничители перемещений и/или устройства фиксации положения по меньшей мере одного силового блока в верхнем положении и/или в нижнем положении с опорой гусениц под ведущими колесами на грунт.
8. Гусеничный трактор с электромеханической трансмиссией, содержащий бортовой источник энергии, тяговые электродвигатели, по меньшей мере один контроллер, раму и ходовую часть с тележками гусениц, опорными катками, гусеницами и ведущими колесами, входящими вместе с бортовыми редукторами и тяговыми электродвигателями по меньшей мере в один силовой блок, который механически соединен по меньшей мере с одной тележкой гусениц с использованием по меньшей мере одного шарнира и/или упругого элемента с возможностью перемещения по меньшей мере одного силового блока в верхнее или нижнее положение с опорой гусениц под ведущими колесами на грунт, отличающийся тем, что по меньшей мере один силовой блок содержит по меньшей мере один гидравлический, или электрогидравлический, или электромеханический привод его перемещения в вертикальной плоскости относительно тележек гусениц или рамы трактора.
9. Трактор по п. 8, отличающийся тем, что контроллер приспособлен для автоматического или автоматизированного управления приводом с возможностью обеспечения опоры гусениц под ведущими колесами на грунт.
10. Трактор по п. 9, отличающийся тем, что контроллер приспособлен для управления приводом с возможностью стабилизации давления гусениц под ведущими колесами на грунт.
11. Трактор по п. 10, отличающийся тем, что он дополнительно содержит по меньшей мере один датчик давления по меньшей мере в одном гидроцилиндре привода, соединенный с контроллером, который выполнен с возможностью вычисления величины давления гусениц на грунт путем обработки выходных сигналов этого датчика и управления приводом в зависимости от результатов этого вычисления.
12. Трактор по п. 8, отличающийся тем, что оси шарниров, обеспечивающих возможность поворота тележек гусениц относительно рамы трактора, а также поворота по меньшей мере одного силового блока относительно тележек гусениц, выполнены совмещенными или раздельными.
13. Трактор по п. 8, отличающийся тем, что силовые блоки механически соединены с тележками гусениц и не связаны между собой.
14. Трактор по п. 8, отличающийся тем, что по меньшей мере один тяговый электродвигатель по меньшей мере в одном силовом блоке присоединен к бортовому редуктору с наружной стороны трактора или со стороны его рамы.
15. Трактор по одному из пп. 8-14, отличающийся тем, что он дополнительно содержит ограничители перемещений и/или устройства фиксации положения по меньшей мере одного силового блока в верхнем положении и/или в нижнем положении с опорой гусениц под ведущими колесами на грунт.
| ЭЛЕКТРИЧЕСКАЯ СИЛОВАЯ ПЕРЕДАЧА ДЛЯ РАБОЧЕЙ МАШИНЫ | 2006 |
|
RU2394701C2 |
| ТРУБОВОЛОЧИЛЬНЫЙ СТАН БАРАБАННОГО ТИПА ^'•••^^Ч|3'''сКЛ ДЛЯ БУХТОВОГО ВОЛОЧЕНИЯ- - - - | 0 |
|
SU174164A1 |
| Гусеничный трактор | 1986 |
|
SU1324918A1 |
| ЭЛЕКТРОМОТОР-КОЛЕСО | 1995 |
|
RU2098694C1 |

