Область техники, к которой относится изобретение
Настоящее изобретение относится к технике взвешивания автотранспортных средств, в частности, в процессе их движения (weigh in motion - WIM) по трассе.
Уровень техники
Взвешивание автотранспортных средств в процессе их движения по трассе приобретает все большее значение как для целей контроля перевозимых грузов, так и для взимания платы за проезд и (или) перегруз.
Обычно автотранспортное средство взвешивается на оборудованной стационарными весами площадке при въезде на платную или контролируемую трассу, а также на аналогичных площадках, организованных на самой трассе (патент РФ на полезную модель №88469, опубл. 10.11.2009; патент США №6980093, опубл. 27.12.2005). Понятно, что в этом случае взвешивание дает статическое значение и требует остановки движения и заезда на специальную площадку, оборудованную взвешивающим устройством достаточно высокой точности. Поэтому говорить о взвешивании в процессе движения для такого способа взвешивания можно лишь условно.
В настоящее время все большее применение находит взвешивание автотранспортных средств непосредственно в процессе их движения. Например, на сайте http://www.cross.cz/en/wim-weigh-in-motion описан способ взвешивания автотранспортных средств при их движении по трассе, оборудованной весовыми датчиками, которые дают возможность определять давление на поверхность дороги от каждой проезжающей оси или даже каждого проезжающего колеса того или иного автотранспортного средства. Вблизи таких весовых датчиков установлены считывающие устройства, которые позволяют считывать ту или иную идентификационную метку автотранспортного средства, проезжающего в этот момент по весовому датчику. Считанные данные вместе с отметкой времени пересылаются в центр обработки данных, где обрабатываются с помощью специальной программы для определения нагрузки на дорожное полотно и, в необходимых случаях, выписки соответствующей квитанции на оплату.
Однако в таких системах, которые как раз и получили название «взвешивание в движении» (weigh in motion - WIM), используемые датчики имеют невысокую точность измерений как из-за технологических особенностей их изготовления и установки, так и вследствие значительной зависимости от погодных условий, времени суток и времени года. Поэтому на таких трассах обязательно используют точные весы, как правило, в начале или в конце трассы (патент США №7684946, опубл. 23.03.2010). В этом случае данные с весовых датчиков, размещенных в дорожном полот-He(WIM), используются лишь для преселекции, т.е. для предварительной оценки фактора перегруза и необходимости проведения точного взвешивания на статических весах.
Раскрытие изобретения
Цель настоящего изобретения состоит в разработке способа и системы повышения точности при взвешивании автотранспортного средства в движении, которые позволили бы существенно повысить точность измерений весовых датчиков, установленных на трассе, без использования отдельных точных весов, что в итоге снизит стоимость используемого оборудования.
Для решения этой задачи и достижения указанного технического результата в первом объекте настоящего изобретения предложен способ повышения точности при взвешивании автотранспортного средства в движении с помощью по меньшей мере одной группы датчиков для поколесного или поосного взвешивания автотранспортного средства, размещенной на трассе, заключающийся в том, что: размещают на трассе по меньшей мере одну дополнительную группу датчиков для поколесного или поосного взвешивания автотранспортного средства на расстоянии от предыдущей группы по направлению движения не менее максимально возможной длины взвешиваемого автотранспортного средства; запоминают, в качестве первых измерительных показаний, показания каждого из датчиков группы, размещенной первой по направлению движения на упомянутой трассе в любой паре групп датчиков, при проезде по ней каждого из колес или каждой из осей конкретного автотранспортного средства; запоминают, в качестве вторых измерительных показаний, показания каждого из датчиков группы, размещенной следующей по направлению движения на трассе в паре групп датчиков, при проезде по ней каждого из колес или каждой из осей конкретного автотранспортного средства, проехавшего перед этим по предыдущей группе датчиков в той же паре групп датчиков; находят средние значения первого и второго измерительных показаний, соответствующих конкретному колесу или оси автотранспортного средства и принимают их в качестве результирующих показаний веса данного колеса или оси; вычисляют соответствующие корректирующие коэффициенты при сравнении показаний веса каждого колеса или оси, измеренных каждым из датчиков группы или каждой из групп датчиков в полосе движения данного автотранспортного средства, с найденными соответствующими средними значениями и используют вычисленные корректирующие коэффициенты для коррекции их показаний при взвешивании следующего автотранспортного средства.
Особенность способа по настоящему изобретению состоит в том, что каждая из групп датчиков может включать в себя по меньшей мере два датчика для поколесного или поосного взвешивания автотранспортного средства, разнесенные по трассе в направлении движения на величину менее минимально возможной длины взвешиваемого автотранспортного средства.
Еще одна особенность способа по настоящему изобретению состоит в том, что в качестве измерительных показаний датчиков данной группы могут принимать усредненные показания всех входящих в нее датчиков.
Еще одна особенность способа по настоящему изобретению состоит в том, что в качестве измерительных показаний каждого из датчиков данной группы могут принимать показания соответствующего из датчиков этой группы при проезде по ней каждого из колес или каждой из осей конкретного автотранспортного средства, измеренные относительно показаний датчиков другой группы в паре групп датчиков, измеренных в тот же момент времени.
Еще одна особенность способа по настоящему изобретению состоит в том, что могут обеспечивать распознавание автотранспортного средства при его проезде очередной из групп датчиков, для чего устанавливают вблизи по меньшей мере первой по направлению движения из групп датчиков считывающее средство, предназначенное для считывания соответствующих идентификационных меток, которыми оборудованы автотранспортные средства.
Для решения той же задачи и достижения того же технического результата во втором объекте настоящего изобретения предложена система повышения точности при взвешивании автотранспортного средства в движении, содержащая по меньшей мере две группы датчиков для поколесного или поосного взвешивания автотранспортного средства, одна из которых размещена на трассе по направлению движения на расстоянии от предыдущей группы не менее максимально возможной длины взвешиваемого автотранспортного средства, и вычислительный блок, к которому подключены датчики обеих групп датчиков и который предназначен для осуществления этапов, на которых: запоминают, в качестве первых измерительных показаний, показания каждого из датчиков группы, размещенной первой по направлению движения на трассе в любой паре групп датчиков, при проезде по ней каждого из колес или каждой из осей конкретного автотранспортного средства; запоминают, в качестве вторых измерительных показаний, показания каждого из датчиков группы, размещенной следующей по направлению движения на упомянутой трассе в паре групп датчиков, при проезде по ней каждого из колес или каждой из осей конкретного автотранспортного средства, проехавшего перед этим по предыдущей группе датчиков в той же паре групп датчиков; находят средние значения первого и второго измерительных показаний, соответствующих конкретному колесу или оси автотранспортного средства и принимают их в качестве результирующих показаний веса данного колеса или оси; вычисляют соответствующие корректирующие коэффициенты при сравнении показаний веса каждого колеса или оси, измеренных каждым из датчиков или каждой из групп датчиков измерительного комплекса в полосе движения данного автотранспортного средства, с найденными соответствующими средними значениями и используют вычисленные корректирующие коэффициенты для коррекции их показаний при взвешивании следующего автотранспортного средства.
Особенность системы по настоящему изобретению состоит в том, что каждая из групп датчиков может включать в себя по меньшей мере два датчика для поколесного или поосного взвешивания автотранспортного средства, разнесенные по трассе в направлении движения на величину менее минимально возможной длины взвешиваемого автотранспортного средства.
Еще одна особенность системы по настоящему изобретению состоит в том, что в качестве измерительных показаний датчиков данной группы могут быть приняты усредненные показания всех входящих в нее датчиков.
Еще одна особенность системы по настоящему изобретению состоит в том, что в качестве измерительных показаний каждого из датчиков данной группы показания соответствующего из датчиков этой группы при проезде по ней каждого из колес или каждой из осей конкретного автотранспортного средства, измеренные относительно показаний датчиков другой группы в паре групп датчиков, измеренных в тот же момент времени.
Еще одна особенность системы по настоящему изобретению состоит в том, что система может дополнительно содержать считывающее средство вблизи по меньшей мере первой по направлению движения из групп датчиков, предназначенное для считывания соответствующих идентификационных меток, которыми оборудованы автотранспортные средства.
Краткое описание чертежей
Изобретение иллюстрируется далее чертежом, на котором показана условная схема системы, в которой реализуется способ по настоящему изобретению.
Подробное описание изобретения
Как показано на чертеже, способ по настоящему изобретению может быть реализован в системе, в которой на трассе 1 (условно показанной односторонней и однополосной с направлением движения по стрелке 2) установлены две группы 3 и 4 датчиков, имеющие каждая по два датчика (взвешивающих устройства). На чертеже датчики первой группы 3 имеют ссылочные позиции 31 и 32, а датчики второй группы 4 имеют ссылочные позиции 41 и 42, причем датчики 31 и 41 являются первыми в соответствующей из групп 3 и 4 при отсчете в направлении 2 движения.
Группы 3 и 4 размещены на трассе 1 на расстоянии R одна от другой по направлению движения, причем расстояние R не менее максимально возможной длины взвешиваемого автотранспортного средства. К примеру, это расстояние R может превышать 20 м для трасс, на которых разрешен проезд длинномерных грузовых автотранспортных средств. Отметим, что под автотранспортным средством в данном описании может пониматься не только грузовой автомобиль или автопоезд, но также трактор, тягач и т.п.
Датчики 31 и 32 в первой группе 3 и датчики 41 и 42 во второй группе 4 размещены на трассе на расстоянии L один от другого по направлению движения, причем расстояние L меньше минимально возможной длины взвешиваемого автотранспортного средства. Например, это расстояние L может быть меньше 5 м. Отметим, что в качестве длины автотранспортного средства может выступать как габаритный размер этого автотранспортного средства, так и расстояние между его передней и задней осями.
В качестве датчиков (взвешивающих устройств) 31, 32, 41, 42 можно использовать любые известные в настоящее время или разрабатываемые в будущем весовые датчики. Например, это могут быть датчики, используемые в упомянутых выше средствах взвешивания чешской компании Cross; либо оптоволоконные датчики, описанные в патенте РФ на полезную модель №13925 (опубл. 10.06.2000), в патентах США №4560016 (опубл. 24.12.1985) и №5260520 (опубл. 09.11.1993), в заявке Великобритании №2250813 (опубл. 17.06.1992) или в заявке Кореи №2004/0102878 (опубл. 08.12.2004); либо в качестве таких датчиков могут использоваться тензо-датчики, описанные в патентах РФ №2239798 (опубл. 10.11.2004) и №2390734 (опубл. 27.05.2010) или в заявке Кореи №2008/0105371 (опубл. 04.12.2008). В принципе, конкретная конструкция датчиков 31, 32, 41, 42 не имеет значения, и не важно, изготовлены ли все они одинаковыми или по разным технологиям.
Датчики (взвешивающие устройства) 31, 32, 41, 42, как правило, укладываются в дорожное полотно трассы 1 в каждой полосе движения поперек направления 2 движения автотранспортных средств. Такое размещение датчиков позволяет измерять вес автотранспортного средства поосно. Если же требуется определять вес поколесно, каждый из датчиков 31, 32, 41, 42 может быть разделен на две части, как это описано, например, в упомянутом выше патенте РФ №2390734 и как показано на чертеже. Целесообразно размещать группы 3 и 4 датчиков там, где скорость автотранспортного средства ожидается неизменной, т.е. на относительно прямых отрезках трассы 1, имеющих неровности до высоте и уклоны не больше заранее заданных величин. Обычно протяженность таких отрезков, их уклоны и неровности по высоте, а возможно и некоторые иные параметры заданы изготовителями соответствующих весовых систем.
Специалистам понятно, что количество датчиков в каждой группе не обязательно равно двум. В принципе каждая группа может содержать один или более датчиков, что никак не влияет на объем притязаний по данному изобретению.
Как показано на чертеже, перед каждым из датчиков 31, 32, 41, 42 может быть размещена индукционная петля 5. В принципе, такие индукционные петли 5 могут устанавливаться только перед первыми по направлению движения датчиками в каждой группе (т.е. перед датчиками 31 и 41). Каждая индукционная петля 5 служит для индикации наезда автотранспортного средства на расположенный за ней датчик. Пока через данный датчик проезжают оси одного и того же транспортного средства (или же оси его прицепа), в этой индукционной петле наводится электрический потенциал за счет перемещающейся над ней массы данного автотранспортного средства. Но как только данное автотранспортное средство проедет через находящийся за этой индукционной петлей 5 датчик, наведенный потенциал в этой индукционной петле 5 резко снизится, что может быть определено отдельной пороговой схемой. Наезд на тот же датчик другого автотранспортного средства, даже едущего почти «впритык» к уже проехавшему, вызовет новое повышение потенциала в индукционной петле 5, которое также будет распознано соответствующей пороговой схемой. Конкретные виды пороговых схем общеизвестны специалистам.
Сигналы со всех датчиков обеих групп 3 и 4 и со всех индукционных петель 5 поступают в вычислительный блок 6. На чертеже соединения от датчиков 31, 32, 41, 42 к вычислительному блоку 6 условно показаны единичными линиями, однако в случае вышеупомянутого разделения этих датчиков для поколесного взвешивания каждая половина датчика будет иметь свою соединительную линию к вычислительному блоку 6.
Вблизи по меньшей мере первой группы 3 датчиков в паре групп 3 и 4 датчиков может быть установлено считывающее средство (не показано на чертеже). Каждое такое считывающее средство выполнено с возможностью считывать по меньшей мере одну из идентификационных меток, которыми оснащено автотранспортное средство. Такими идентификационными метками могут быть как государственные регистрационные номера, так и, к примеру, радиоидентификационные метки (радиоидентификаторы, RFID), закрепляемые на автотранспортных средствах. При этом считывающее средство представляет собой, например, видеокамеру и (или) считыватель (ридер), выполнение которого позволяет считывать идентификационные метки соответствующего типа. При проезде автотранспортного средства через первую в паре группу 3 датчиков расположенное рядом считывающее средство одновременно осуществляет фиксацию времени считывания. Например, при использовании видеокамеры в качестве считывающего средства такая фиксация времени осуществляется автоматически.
Вычислительный блок 6 осуществляет необходимую обработку данных, подробно описанную ниже. Для этого вычислительный блок 6 может содержать соответственно запрограммированное процессорное средство (компьютер, процессор, контроллер и т.п.) и память для хранения данных, принятых от датчиков 31, 32, 41, 42, индукционных петель 5, а также от считывающих средств, если они установлены, и для хранения результирующих данных, полученных в результате обработки принятых данных. Конкретные возможные варианты осуществления запрограммированного процессорного средства и памяти известны специалистам.
В системе, показанной на чертеже, способ повышения точности при взвешивании автотранспортного средства в движении по настоящему изобретению осуществляется следующим образом.
При проезде некоторого автотранспортного средства через группу 3 датчиков, расположенную первой в паре групп 3 и 4 датчиков на трассе 1, датчики 31, 32 этой группы 3 формируют сигналы, пропорциональные весу каждой оси или каждого колеса проезжающего автотранспортного средства. Показания каждого из датчиков группы 3 при проезде по этой группе датчиков каждого из колес или каждой из осей конкретного автотранспортного средства запоминают в вычислительном блоке 6 в качестве первых измерительных показаний для данного автотранспортного средства. Точно так же показания каждого из датчиков группы 4 датчиков, расположенной вслед за группой 3 датчиков по направлению 2 движения, при проезде по этой группе датчиков каждого из колес или каждой из осей того же самого автотранспортного средства запоминают в вычислительном блоке 6 в качестве вторых измерительных показаний для этого автотранспортного средства.
В принципе, показания датчиков 31 и 32 в первой группе 3 датчиков и показания датчиков 41 и 42 во второй группе 4 датчиков при проезде по ним одного и того же автотранспортного средства можно усреднять по отдельности в каждой из групп 3 и 4 датчиков. Тогда в качестве измерительных показаний в вычислительном блоке 6 запоминают эти усредненные значения. Однако возможен и иной вариант, когда при проезде по какому-либо датчику (пусть это будет для определенности датчик 31) первой группы 3 одной из осей (одного из колес) автотранспортного средства одновременно с измерением веса этим датчиком (31) фиксируется показание соответственного датчика (т.е. датчика 41) во второй группе 4 этой пары групп 3 и 4 датчиков. Это показание датчика (41) второй группы 4 используется как опорное для измерений соответственного датчика (31) первой группы 3. Такое же измерение осуществляется, когда автотранспортное средство проезжает датчики другой группы 4, но теперь уже датчики первой группы 3 работают как опорные. При этом удается минимизировать влияние окружающей среды на показания датчиков, поскольку размещение групп 3 и 4 датчиков недалеко одна от другой дает право считать условия окружающей среды одинаковыми для обеих групп 3 и 4 датчиков. В этом случае в вычислительном блоке 6 в качестве измерительных показаний запоминают сигналы тех или иных датчиков, соответственно скорректированные (уменьшенные) на величины соответствующих опорных измерений.
Как уже отмечалось, датчики 31, 32, 41, 42 предпочтительно могут иметь сравнительно простую конструкцию и, соответственно, невысокую точность (в противном случае они резко удорожили бы систему), что не позволяет применять их для законного предъявления претензий по превышению веса на подконтрольных трассах без проведения контрольного взвешивания на более точных статических весах. Точность показаний этих датчиков можно повысить, используя в цепочке последовательно расположенных весовых постов хотя бы одни более точные весы, корректируя по показаниям этих точных весов для конкретного автотранспортного средства. Однако это требует усложнения и удорожания используемой системы. Поэтому в настоящем изобретении повышение точности осуществляется иначе.
Как известно, точность статистических оценок можно существенно повысить при усреднении нескольких независимых случайных событий. Действительно, среднеквадратичное отклонение (как раз и характеризующее точность) для среднего по совокупности независимых величин обратно пропорционально корню квадратному из числа этих величин (Справочник по вероятностным расчетам. - М.: Воениздат, 1970. - С.297). Как очевидно, датчики, входящие в разные группы 3 и 4, можно считать независимыми. Следовательно, точность усредненной оценки для датчиков обеих групп 3 и 4 в отношении случайной ошибки повысится в корень квадратный из двух, т.е. примерно в 1,41 раз.
Поэтому для запомненных значений первого и второго измерительных показаний в вычислительном блоке 6 находят средние значения, соответствующие конкретному колесу или оси автотранспортного средства, и принимают их в качестве результирующих показаний веса данного колеса или оси для этого автотранспортного средства. При этом в вычислительном блоке 6 вычисляют соответствующие корректирующие коэффициенты. Это выполняется путем сравнения показаний веса каждого колеса или оси, измеренных каждым из датчиков группы или каждой из групп датчиков в полосе движения данного автотранспортного средства, с найденными соответствующими средними значениями. Вычисленные корректирующие коэффициенты используют для коррекции показаний при взвешивании следующего автотранспортного средства с помощью групп 3 и 4 датчиков.
Специалистам понятно, что подобные пары групп 3 и 4 датчиков могут размещаться на трассе 1 неоднократно. Данные, полученные вычислительными блоками 6 каждой такой пары групп 3 и 4 датчиков, могут передаваться в центр обработки (не показан на чертеже) вместе с данными идентификации соответствующего транспортного средства, полученными с помощью вышеупомянутых считывающих средств. Эти данные могут использоваться как для повышения точности остальных групп датчиков на трассе 1, так и для иных целей.
Но даже в отсутствие центра обработки неоднократные измерения веса автотранспортного средства с помощью описанной пары групп датчиков с последующим усреднением результатов и коррекцией показаний согласно данному изобретению позволяет повысить точность измерения веса автотранспортного средства за счет многократных повторений «двойных» измерений веса. Теоретически первоначальная точность каждого из датчиков в таких парах групп после каждого измерения и соответствующей коррекции будет возрастать и стремиться к потенциальной точности собственно датчика, измеренной в лабораторных условиях без влияния систематических и случайных ошибок, а на определенном этапе достигнуть точности эталонных (в основном, тензометрических) датчиков, используемых при окончательном измерении веса на статических весах на отгонных площадках.
Изобретения относятся к весоизмерительной технике и могут быть использованы для взвешивания автотранспортных средств в процессе их движения по трассе. Способ осуществляется с помощью системы, содержащей одну группу датчиков для поколесного или поосного взвешивания автотранспортного средства, размещенную на трассе. Размещают на трассе вторую группу датчиков на расстоянии от предыдущей группы по направлению движения не менее максимально возможной длины взвешиваемого автотранспортного средства. Затем запоминают, в качестве первых и вторых измерительных показаний, показания каждого из датчиков соответствующей группы - при проезде по ней каждого из колес или каждой из осей конкретного автотранспортного средства. Далее находят средние значения первого и второго измерительных показаний, соответствующих конкретному колесу или оси автотранспортного средства и принимают их в качестве результирующих показаний веса данного колеса или оси. Затем вычисляют соответствующие корректирующие коэффициенты при сравнении показаний веса каждого колеса или оси, измеренных каждым из датчиков группы или каждой из групп датчиков в полосе движения данного автотранспортного средства, с найденными соответствующими средними значениями и используют вычисленные корректирующие коэффициеты для коррекции их показаний при взвешивании следующего автотранспортного средства. Технический результат заключается в повышении точности измерений без использования отдельных точных весов. 2 н. 8 з.п. ф-лы, 1 ил.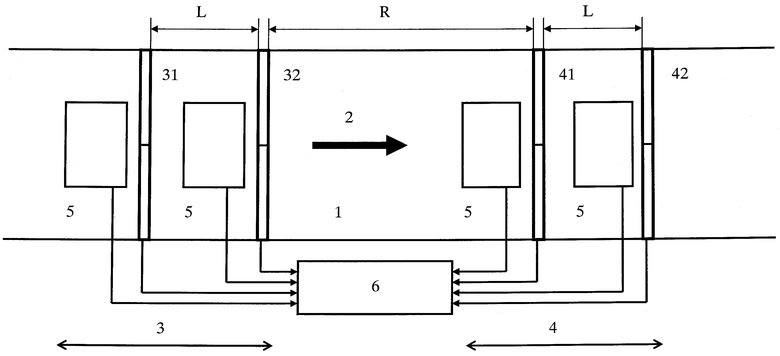
1. Способ повышения точности при взвешивании автотранспортного средства в движении с помощью по меньшей мере одной группы датчиков для поколесного или поосного взвешивания автотранспортного средства, размещенной на трассе, заключающийся в том, что:
размещают на трассе по меньшей мере одну дополнительную группу датчиков для поколесного или поосного взвешивания автотранспортного средства на расстоянии от предыдущей группы по направлению движения не менее максимально возможной длины взвешиваемого автотранспортного средства;
запоминают, в качестве первых измерительных показаний, показания каждого из датчиков группы, размещенной первой по направлению движения на упомянутой трассе в любой паре упомянутых групп датчиков, при проезде по ней каждого из колес или каждой из осей конкретного автотранспортного средства;
запоминают, в качестве вторых измерительных показаний, показания каждого из датчиков группы, размещенной следующей по направлению движения на упомянутой трассе в упомянутой паре групп датчиков, при проезде по ней каждого из колес или каждой из осей упомянутого конкретного автотранспортного средства, проехавшего перед этим по предыдущей группе датчиков в той же паре групп датчиков;
находят средние значения первого и второго измерительных показаний, соответствующих конкретному колесу или оси автотранспортного средства и принимают их в качестве результирующих показаний веса данного колеса или оси;
вычисляют соответствующие корректирующие коэффициенты при сравнении показаний веса каждого колеса или оси, измеренных каждым из датчиков группы или каждой из групп датчиков в полосе движения данного автотранспортного средства, с найденными соответствующими средними значениями и используют вычисленные корректирующие коэффициенты для коррекции их показаний при взвешивании следующего автотранспортного средства.
2. Способ по п.1, в котором каждая из упомянутых групп датчиков включает в себя по меньшей мере два датчика для поколесного или поосного взвешивания автотранспортного средства, разнесенные по трассе в направлении движения на величину менее минимально возможной длины взвешиваемого автотранспортного средства.
3. Способ по п.1 или 2, в котором принимают в качестве упомянутых измерительных показаний датчиков данной группы усредненные показания всех входящих в нее датчиков.
4. Способ по п.1, в котором принимают в качестве упомянутых измерительных показаний каждого из датчиков данной группы показания соответствующего из датчиков этой группы при проезде по ней каждого из колес или каждой из осей конкретного автотранспортного средства, измеренные относительно показаний датчиков другой группы в упомянутой паре групп датчиков, измеренных в тот же момент времени.
5. Способ по п.1, в котором обеспечивают распознавание автотранспортного средства при его проезде очередной из упомянутых групп датчиков, для чего устанавливают вблизи по меньшей мере первой по направлению движения из упомянутых групп датчиков считывающее средство, предназначенное для считывания соответствующих идентификационных меток, которыми оборудованы автотранспортные средства.
6. Система повышения точности при взвешивании автотранспортного средства в движении, содержащая:
по меньшей мере две группы датчиков для поколесного или поосного взвешивания автотранспортного средства, одна из которых размещена на трассе по направлению движения на расстоянии от предыдущей группы не менее максимально возможной длины взвешиваемого автотранспортного средства;
вычислительный блок, к которому подключены датчики обеих упомянутых групп датчиков и который предназначен для осуществления этапов, на которых:
запоминают, в качестве первых измерительных показаний, показания каждого из датчиков группы, размещенной первой по направлению движения на упомянутой трассе в любой паре упомянутых групп датчиков, при проезде по ней каждого из колес или каждой из осей конкретного автотранспортного средства;
запоминают, в качестве вторых измерительных показаний, показания каждого из датчиков группы, размещенной следующей по направлению движения на упомянутой трассе в упомянутой паре групп датчиков, при проезде по ней каждого из колес или каждой из осей упомянутого конкретного автотранспортного средства, проехавшего перед этим по предыдущей группе датчиков в той же паре групп датчиков;
находят средние значения первого и второго измерительных показаний, соответствующих конкретному колесу или оси автотранспортного средства и принимают их в качестве результирующих показаний веса данного колеса или оси;
вычисляют соответствующие корректирующие коэффициенты при сравнении показаний веса каждого колеса или оси, измеренных каждым из датчиков или каждой из групп датчиков измерительного комплекса в полосе движения данного автотранспортного средства, с найденными соответствующими средними значениями и используют вычисленные корректирующие коэффициенты для коррекции их показаний при взвешивании следующего автотранспортного средства.
7. Система по п.6, в которой каждая из упомянутых групп датчиков включает в себя по меньшей мере два датчика для поколесного или поосного взвешивания автотранспортного средства, разнесенные по трассе в направлении движения на величину менее минимально возможной длины взвешиваемого автотранспортного средства.
8. Система по п.6 или 7, в которой в качестве упомянутых измерительных показаний датчиков данной группы приняты усредненные показания всех входящих в нее датчиков.
9. Система по п.6, в которой в качестве упомянутых измерительных показаний каждого из датчиков данной группы показания соответствующего из датчиков этой группы при проезде по ней каждого из колес или каждой из осей конкретного автотранспортного средства, измеренные относительно показаний датчиков другой группы в упомянутой паре групп датчиков, измеренных в тот же момент времени.
10. Система по п.6, дополнительно содержащая считывающее средство вблизи по меньшей мере первой по направлению движения из упомянутых групп датчиков, предназначенное для считывания соответствующих идентификационных меток, которыми оборудованы автотранспортные средства.
| US 7684946 A1, 23.03.2010 | |||
| JP 2006226812 A, 31.08.2006 | |||
| JP 2010203954 A, 16.09.2010 | |||
| JP 2010216828 A, 30.09.2010 | |||
| JP 2006349636 A, 28.12.2006 | |||
| СПОСОБ ПОЭЛЕМЕНТНОГО ВЗВЕШИВАНИЯ АВТОМОБИЛЕЙ | 2002 |
|
RU2239798C2 |
| Способ взвешивания автомобилей в движении и устройство для его осуществления | 1983 |
|
SU1276916A1 |

