Изобретение относится к измерительной технике и может быть использовано для измерения времени задержки распространения сигнала цифровых интегральных микросхем.
Известен способ измерения времени задержки распространения сигнала цифровых интегральных микросхем путем вычитания из времени появления сигнала на выходе микросхемы времени поступления сигнала на вход по заданному уровню (см. ГОСТ 18683.2-83. Микросхемы интегральные цифровые. Методы измерения динамических электрических параметров).
Недостатком известного способа является большая погрешность измерения времени задержки из-за малого измеряемого временного интервала. Время задержки распространения сигнала современных цифровых интегральных микросхем составляет десятки наносекунд и менее. Так, типовое время задержки КМОП микросхемы с напряжением питания 10 В составляет 25 нс, а с питанием 5 В составляет 35 нс.
Наиболее близким к заявленному изобретению по совокупности признаков способом того же назначения и принятым за прототип является рециркуляционный способ измерения времени задержки распространения сигнала, включающий формирование стартового и стопового импульсов; передачу и поочередную рециркуляцию стартового и стопового импульсов по двум параллельным каналам, каждый из которых содержит линию задержки; и измерение временного интервала между их передними или задними фронтами через заданное количество циклов рециркуляции (см. А.С. СССР №474784, авторов Семенов А.Г., Игнатенков А.П. «Устройство дискретного измерения временных интервалов», опубликовано 25.06.1975, бюллетень №23).
Недостатком известного способа, принятого за прототип, является большая погрешность измерения временного интервала в диапазоне единиц наносекунд, так как стартовый и стоповый импульсы формируются по переднему и заднему фронту измеряемого импульса, и длительность стартового и стопового импульсов должна быть меньше длительности измеряемого временного интервала. При прохождении по каналам преобразования импульсы наносекундной длительности наиболее подвергнуты искажениям и при многократном прохождении импульсов по указанным каналам искажения и погрешности преобразования будут накапливаться.
Технический результат заключается в уменьшении погрешности измерения временного интервала в диапазоне единиц наносекунд.
Указанный технический результат достигается тем, что в известном рециркуляционном способе измерения времени задержки распространения сигнала цифровых интегральных микросхем, включающем формирование стартового и стопового импульсов одинаковой длительности; передачу и поочередную рециркуляцию стартового и стопового импульсов по двум параллельным каналам с переключением каналов с помощью двух коммутаторов, и каждый из каналов содержит линию задержки; измерение временного интервала между передними или задними фронтами стартового и стопового импульсов через заданное количество N циклов рециркуляции, отличие заключается в том, что стартовый и стоповый импульсы поступают в начале первого цикла рециркуляции на первые объединенные входы двух схем ИЛИ каждого канала, а в начале следующих циклов проходят через вторые входы схем ИЛИ; и соединенные с выходом схем ИЛИ линии задержки каждого канала регулируемые; а контролируемую микросхему последовательно включают в канал рециркуляции стопового импульса, и длительность стартового и стопового импульсов и интервал между ними предварительно задают; а в цепь рециркуляции стартового и стопового импульсов включают общую для двух каналов линию задержки, которая подключается первым коммутатором или к каналу стартового импульса, или к каналу стопового импульса, а вторым коммутатором подключается или ко второму входу схемы ИЛИ канала стартового импульса, или ко второму входу схемы ИЛИ канала стопового импульса, при этом коммутаторы управляются или стоповым, или стартовым импульсами; и измерение временного интервала между передними или задними фронтами стартового и стопового импульсов осуществляют на вторых входах схем ИЛИ при достижении N+1 цикла рециркуляции, а искомую величину определяют по формуле:
где Tизм - измеренный временной интервал между передними или задними фронтами стартового и стопового импульсов через заданное количество циклов рециркуляции; N - количество циклов рециркуляции; τ - длительность стартового и стопового импульсов; T0 - первоначальная длительность интервала между стартовым и стоповым импульсами; при этом первоначальная длительность интервала между стартовым и стоповым импульсами должна превышать длительность стартового импульса; а длительность между передним фронтом стартового импульса и задним фронтом стопового импульса в конце всех циклов рециркуляции не должна превышать время задержки, вносимой общей линией задержки; причем, перед подключением контролируемой микросхемы, время задержки каналов выравнивают регулируемыми линиями задержки.
Сущность изобретения заключается в следующем. Измерение малых временных интервалов проводят, как правило, рециркуляционным способом (см., например, Рециркуляционные преобразователи временного интервала в код: Учеб. пособие / Г.Н. Абрамов; Поволж. техн. ин-т сервиса, 85 с., М. Изд-во Гос. акад. сферы быта и услуг. 1998). В рециркуляционных измерителях малых временных интервалов сформированный одиночный импульс, равный по длительности измеряемому временному интервалу, многократно рециркулирует по каналу, содержащему схему ИЛИ и линию задержки. При достижении заданных N циклов рециркуляции определяют время задержки распространения сигнала TЗ=Tизм/N, где Tизм - длительность импульса задержки в конце всех циклов рециркуляции. Кроме рециркуляции одиночного импульса используют также (как это реализовано в прототипе) рециркуляцию двух импульсов - стартового и стопового по двум параллельным каналам. Стартовый и столовый импульсы формируются по переднему и заднему фронту одиночного импульса. Использование для рециркуляции стартового и стопового импульсов ограничено минимальной длительностью временного интервала. Сформированные по фронтам одиночного сигнала два импульса должны иметь меньшую длительность, чем длительность одиночного сигнала, что не всегда выполнимо.
Для устранения ограничений на длительность импульса измеряемого временного интервала длительность стартового и стопового импульсов в предложенном изобретении не формируют по фронтам сигнала, а предварительно задают (импульсы напряжения 
Стартовый и стоповый импульсы поступают в начале первого цикла рециркуляции на первые объединенные входы двух схем ИЛИ каждого канала, а в начале следующих циклов проходят через вторые входы схем ИЛИ. Соединенные с выходом схем ИЛИ линии задержки каждого канала регулируемые. Контролируемую микросхему со временем задержки распространения сигнала TЗ последовательно включают в канал рециркуляции стопового импульса.
Предварительно перед подключением контролируемой микросхемы, регулируемыми линиями задержки добиваются одинаковой задержки Tк двух каналов, так как получить равные задержки подбором схем ИЛИ, особенно в диапазоне изменения температур окружающей среды, невозможно. В каждый момент времени работает один из параллельных каналов.
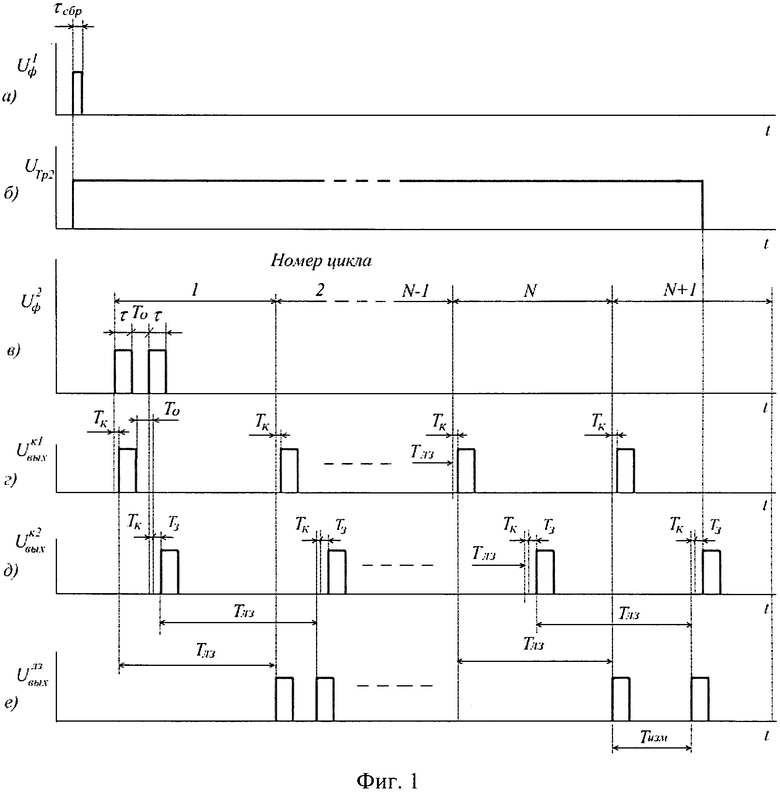
В цепь рециркуляции стартового и стопового импульсов включают общую для двух параллельных каналов линию задержки, которая подключается первым коммутатором или к каналу стартового импульса, или к каналу стопового импульса, а вторым коммутатором подключается или ко второму входу схемы ИЛИ канала стартового импульса, или ко второму входу схемы ИЛИ канала стопового импульса. Коммутаторы управляются или стоповым, или стартовым импульсами. Измерение временного интервала между передними или задними фронтами стартового и стопового импульсов осуществляют на вторых входах схем ИЛИ при достижении N+1 цикла рециркуляции (см. фиг.1е).
Время задержки TК1 распространения сигнала по каналу стартового импульса через схему ИЛИ 3, регулируемую линию задержки 5 и общую линию задержки 7 (см. фиг.2) за N циклов рециркуляции равно:

Эпюра напряжений на выходе канала стартового импульса 
Время задержки TК2 распространения сигнала по каналу стопового импульса через схему ИЛИ 4, регулируемую линию задержки 6, контролируемую микросхему 1 и общую линию задержки 7 за N циклов рециркуляции равно (см. фиг.1д):

Эпюра напряжений на выходе канала стопового импульса 
Разность между (2) и (1) дает временной интервал Tизм между передними или задними фронтами импульсов на выходе общей линии задержки 
Tизм=Nτ+NT0+NTЗ
Отсюда время задержки распространения сигнала TЗ равно:
Выражение (3) легко решается аппаратным методом (вычислителем) с калибровкой шкалы в единицах времени.
Первоначальная длительность интервала между стартовым и стоповым импульсом T0 должна превышать длительность стартового импульса τ; а длительность между передним фронтом стартового импульса и задним фронтом стопового импульса в конце всех циклов рециркуляции N не должна превышать время задержки, вносимой общей линией задержки TЛЗ.
На фиг.1 представлены эпюры напряжений, поясняющие рециркуляционный способ измерения времени задержки распространения сигнала цифровых интегральных микросхем.
На фиг.2 представлена функциональная схема измерителя, реализующая рециркуляционный способ измерения времени задержки распространения сигнала цифровых интегральных микросхем между передними фронтами стартового и стопового импульсов.
Измеритель содержит контролируемую микросхему 1, гнезда XS1 и XS2, формирователь 2 импульсов, первую схему ИЛИ 3 и первую регулируемую линию задержки 5 канала стартового импульса, вторую схему ИЛИ 4 и вторую регулируемую линию задержки 6 канала стопового импульса, обитую линию задержки 7, первый коммутатор 8, второй коммутатор 9, первый триггер 10, счетчик 11, ИВИ 12, третий коммутатор 13, схему И 14, второй триггер 15, вычислитель 16.
Измеритель работает следующим образом. Подключают контролируемую микросхему 1 к гнездам XS1 и XS2 измерителя. С первого выхода формирователя 2 импульсов сигнал сброса 
Затем со второго выхода формирователя 2 импульсов подаются стартовый и стоповый импульсы 
Через 2N-1 переключений первого триггера 10 и счетчика 11, сигнал со счетчика 11 подается на управляющий вход ИВИ 12 и происходит измерение времени задержки между передними фронтами последнего стартового импульса и последнего стопового импульса. Через 2N+1 переключений первого триггера 10 и счетчика 11, сигнал со счетчика 11 подается на второй триггер 15, который блокирует цепь рециркуляции импульсов путем подачи логического нуля на схему И 14. Измеренная величина задержки Tизм поступает на вход вычислителя 16, который определяет время задержки распространения сигнала TЗ по формуле (3).
Перед подключением контролируемой микросхемы 1 необходимо провести выравнивание задержек, вносимых каналом стартового импульса и каналом стопового импульса. Для этого включают третий коммутатор 13 и запускают формирователь 2 стартового и стопового импульсов. Далее измеритель работает, как и при измерении времени задержки распространения сигнала. Регулировкой линий задержек 5 и 6 добиваются равенства нулю времени задержки по каналам согласно формуле (3)
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой измеритель временных интервалов | 1981 |
|
SU966662A1 |
| УСТРОЙСТВО ДЛЯ ПРИВЯЗКИ ШКАЛ ВРЕМЕНИ | 1992 |
|
RU2046393C1 |
| Устройство для дискретного изме-РЕНия ВРЕМЕННыХ иНТЕРВАлОВ | 1978 |
|
SU809034A1 |
| Измеритель временных интервалов | 1985 |
|
SU1307443A1 |
| Измеритель временных интервалов | 1975 |
|
SU551600A1 |
| Преобразователь временных интервалов | 1988 |
|
SU1525914A1 |
| ИНТЕРПОЛЯТОР ПРЯМОГО КОДИРОВАНИЯ ДЛЯ ИЗМЕРЕНИЯ ИНТЕРВАЛОВ ВРЕМЕНИ | 2011 |
|
RU2467371C1 |
| Интерполяционный измеритель вре-МЕННыХ иНТЕРВАлОВ | 1979 |
|
SU819790A1 |
| Способ определения времени задержки распространения сигнала интегральными микросхемами и устройство для его осуществления | 1984 |
|
SU1177761A1 |
| Устройство дискретного измерения временных интервалов | 1975 |
|
SU506827A2 |
Изобретение относится к измерительной технике и может быть использовано для измерения времени задержки распространения сигнала цифровых интегральных микросхем. Формируют стартовый и стоповый импульсы заданной длительности и с заданной длительностью интервала между ними, превышающей длительность стартового импульса. Стартовый и стоповый импульсы подают на два параллельных канала, каждый из которых содержит схему ИЛИ и регулируемую линию задержки. Контролируемую микросхему включают в канал стопового импульса. При одном цикле рециркуляции стартовый импульс проходит канал, первый коммутатор, общую линию задержки, второй коммутатор и возвращается на схему ИЛИ канала. Стартовый импульс управляет коммутаторами, которые переключают общую линию задержки к каналу стопового импульса. Аналогичный путь проходит стоповый импульс, только по каналу с контролируемой микросхемой. Стоповый импульс также управляет коммутаторами, которые переключают общую линию задержки к каналу стартового импульса. Предварительно регулируемыми линиями задержки добиваются равенства задержек, вносимых параллельными каналами без подключенной контролируемой микросхемы. Измеряют длительность временного интервала между передними или задними фронтами стартового и стопового импульса при завершении всех циклов рециркуляции, по которой и определяют искомую величину. Длительность между передним фронтом стартового импульса и задним фронтом стопового импульса в конце всех циклов рециркуляции не должна превышать время задержки, вносимой общей линией задержки. Технический результат заключается в уменьшении погрешности измерения. 2 ил.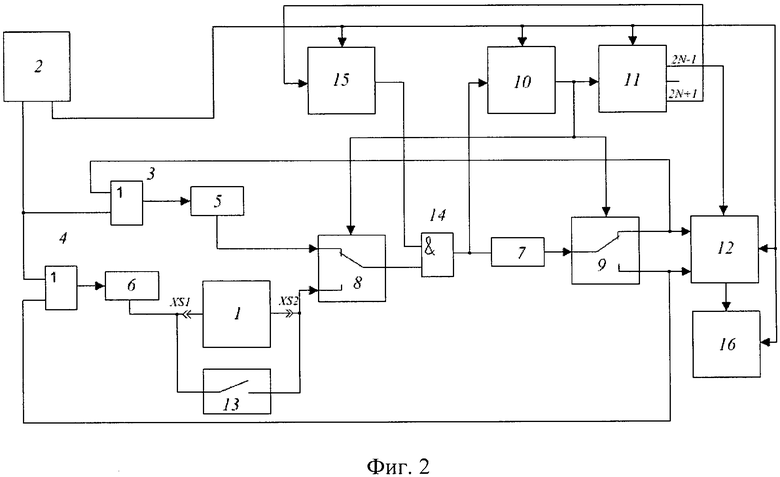
Рециркуляционный способ измерения времени задержки распространения сигнала цифровых интегральных микросхем, включающий формирование стартового и стопового импульсов одинаковой длительности; передачу и поочередную рециркуляцию стартового и стопового импульсов по двум параллельным каналам с переключением каналов с помощью двух коммутаторов, и каждый из каналов содержит линию задержки; измерение временного интервала между передними или задними фронтами стартового и стопового импульсов через заданное количество N циклов рециркуляции, отличающийся тем, что стартовый и стоповый импульсы поступают в начале первого цикла рециркуляции на первые объединенные входы двух схем ИЛИ каждого канала, а в начале следующих циклов проходят через вторые входы схем ИЛИ; и соединенные с выходом схем ИЛИ линии задержки каждого канала регулируемые; а контролируемую микросхему последовательно включают в канал рециркуляции стопового импульса, и длительность стартового и стопового импульсов и интервал между ними предварительно задают; а в цепь рециркуляции стартового и стопового импульсов включают общую для двух каналов линию задержки, которая подключается первым коммутатором или к каналу стартового импульса, или к каналу стопового импульса, а вторым коммутатором подключается или ко второму входу схемы ИЛИ канала стартового импульса, или ко второму входу схемы ИЛИ канала стопового импульса, при этом коммутаторы управляются или стоповым, или стартовым импульсами; и измерение временного интервала между передними или задними фронтами стартового и стопового импульсов осуществляют на вторых входах схем ИЛИ при достижении N+1 цикла рециркуляции, а искомую величину определяют по формуле:
где Tизм - измеренный временной интервал между передними или задними фронтами стартового и стопового импульсов через заданное количество циклов рециркуляции; N - количество циклов рециркуляции; τ - длительность стартового и стопового импульсов; T0 - первоначальная длительность интервала между стартовым и стоповым импульсами; при этом первоначальная длительность интервала между стартовым и стоповым импульсами должна превышать длительность стартового импульса; а длительность между передним фронтом стартового импульса и задним фронтом стопового импульса в конце всех циклов рециркуляции не должна превышать время задержки, вносимой общей линией задержки; причем перед подключением контролируемой микросхемы время задержки каналов выравнивают регулируемыми линиями задержки.
| WO 2009074790 A1, 18.06.2009 | |||
| US 6327218 B1, 04.12.2001 | |||
| Устройство дискретного измерения временных интервалов | 1973 |
|
SU474784A1 |
| US 2007057715 A1 15.03.2007 | |||
| Устройство для контроля времени установления цифроаналогового преобразователя | 1990 |
|
SU1786660A1 |

