Изобретение относится к машиностроению и может быть использовано в конструкциях транспортных средств, а именно в конструкциях автоматических линий и роботизированных комплексов для шагового перемещения различных предметов. Использование данного устройства позволит снизить энергопотребление, повысить производительность и надежность оборудования.
Известны различные виды устройств для циклического перемещения орудий и предметов производства, структура которых включает храповые, кулачковые, мальтийские и другие механизмы [1]. Основным недостатком таких устройств является низкий уровень производительности, т.к. их работа сопровождается сильной вибрацией и негативными динамическими процессами, порождаемыми пульсирующим характером изменения кинетической энергией подвижных звеньев, расходуемой при завершении перемещения на деформирование и изнашивание элементов конструкции механизмов.
Наиболее близким по технической сущности к предлагаемому техническому решению является шаговое поворотное устройство [2], содержащий два кинематически связанных между собой с возможностью поворота в одном направлении вала, установленную на выходном валу обгонную муфту и установленные на обоих валах сцепные муфты и кинематически связанные между собой и подпружиненные относительно друг друга в обоих угловых направлениях фланцы, каждый из которых соединен с одной из частей соответствующей сцепной муфты.
Такая конструкция обеспечивает исключение затрат энергии на разгон и торможение подвижных звеньев, что дает многократное снижение установочной мощности двигателя по сравнению с устройствами, включающими кулачковые, мальтийские и др. механизмы. Автоматическое торможение подвижных звеньев этого устройства позволяет регулировать угол поворота выходного звена и обеспечивает высокую точность позиционирования выходного звена за счет специального алгоритма управления электродвигателем, учитывающего индивидуальные диссипативные свойства конструкции. Однако в этом шаговом устройстве момент, создаваемый пружинами, на порядок больше момента, создаваемого электродвигателем, и поэтому эта конструкция не обеспечивает выведения устройства в рабочее состояние, когда одна из пружин должна быть растянута. Использование двигателя с моментом на валу, превосходящим момент, создаваемый пружинами, приведет к потере вышеуказанных преимуществ. Указанный недостаток проявляется и в начале работы и в случае аварийной остановки выходного звена, которая может произойти в любом его положении и после которой необходимо продолжить движение, что снижает надежность работы устройства и требует установки специального устройства для выведения механизма в исходное состояние.
Задачей изобретения является повышение надежности транспортного устройства.
Это достигается тем, что устройство периодического перемещения содержит установленные в корпусе кинематически связанные с возможностью вращения в одном направлении два вала, на которых укреплены подпружиненные относительно друг друга в обоих угловых направлениях фланцы, присоединяемые к валам с помощью управляемых сцепных муфт, укрепленную на одном из валов обгонную муфту, привод включает укрепленную на одном из валов дополнительную обгонную муфту, укрепленный на корпусе электромагнит, якорь которого с помощью тяги шарнирно связан с двумя распорными звеньями, одно из которых шарнирно укреплено на корпусе, а второе шарнирно укреплено на обойме обгонной муфты.
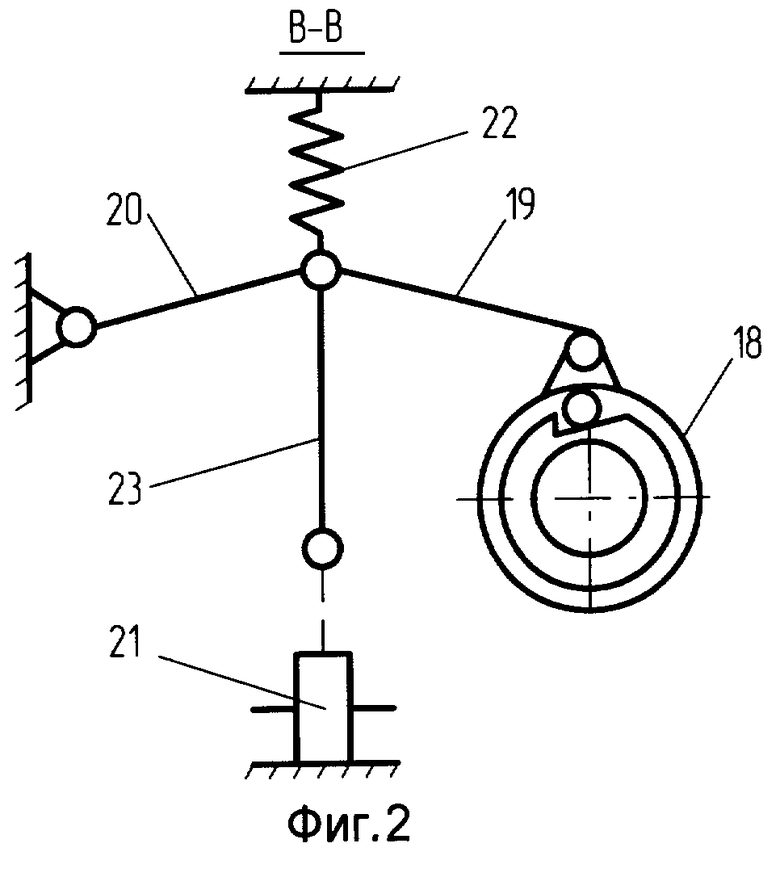
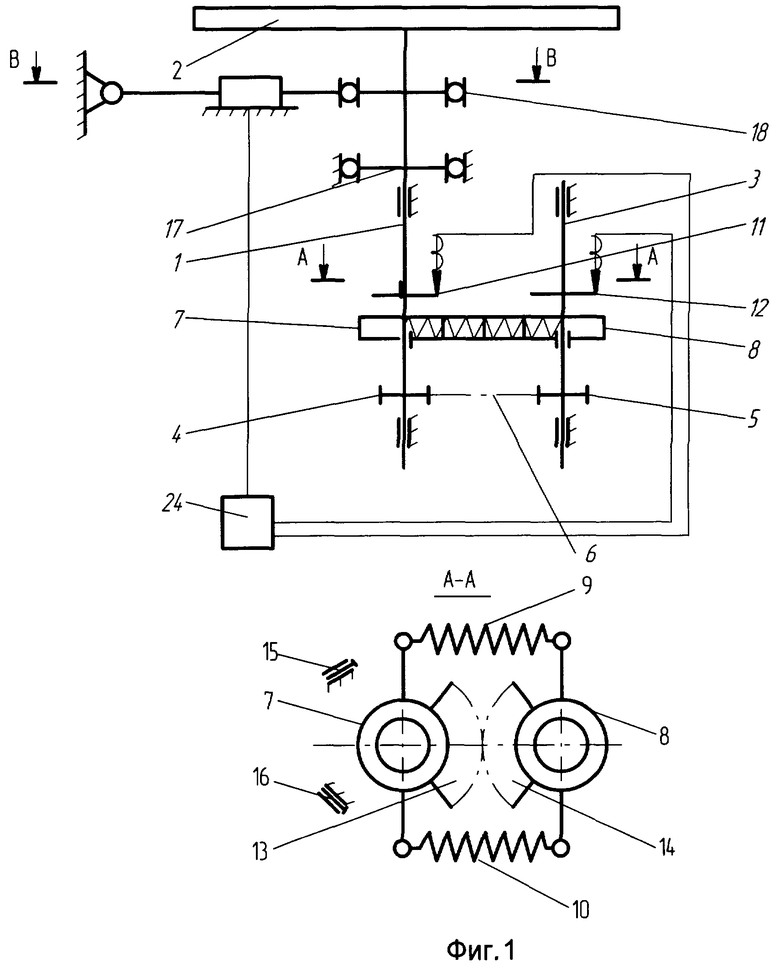
На чертежах показана схема устройства периодического перемещения (фиг.1) и схема привода (фиг.2).
Поворотное устройство (фиг.1) содержит стойку (не показана) с установленным на ней валом 1, на котором закреплен поворотный стол 2. Поворотное устройство содержит также дополнительный вал 3, кинематически связанный с валом 1 с помощью цепной передачи 4, 5, 6. На валах 1 и 3 укреплены с возможностью вращения фланцы 7 и 8, подпружиненные друг к другу с помощью пружин 9, 10 и присоединяемые к валам с помощью управляемых сцепных муфт 11, 12.
Фланцы 7 и 8 соединены между собой с помощью зубчатых секторов 13 и 14. На стойке укреплены регулируемые упоры 15, 16, ограничивающие углы поворотов фланцев 7 и 8. Вал 1 соединен со стойкой через обгонную муфту 17.
Привод устройства (фиг.2) включает закрепленную на валу 1 обгонную муфту 18, на обойме которой шарнирно установлен шатун 19, шарнирно соединенный с коромыслом 20, укрепленным на стойке с возможностью поворота. На стойке установлен электромагнит 21, якорь которого подпружинен к стойке с помощью пружины 22 и с помощью тяги 23 соединен с шарниром, связывающим шатун 19 и коромысло 20. Привод включает также систему управления 24 (фиг.1), электрически связанную с управляемыми сцепными муфтами 11, 12 и электромагнитом 21.
Устройство работает следующим образом. В исходном состоянии фланец 7 с помощью муфты 11 соединен с валом 1, а муфта 12 по команде блока управления 24 включена и фланец 8 отсоединен от вала 3. Для заведения (растяжения) пружины 10 по команде блока управления 24 электромагнит 21 втягивает якорь и с помощью звеньев 23, 20 и 19 обойма обгонной муфты 18 повернется в направлении по часовой стрелке. При этом вместе с муфтой в этом же направлении будет поворачиваться вал 1 вместе с фланцем 7. Фланец 8 через зубчатую передачу 13, 14 будет поворачиваться в направлении против часовой стрелки, и пружина 10 будет растягиваться. Вращение вала 3 будет происходить в направлении по часовой стрелке и не будет препятствовать движению фланца 8. При обесточивании магнита его якорь с помощью пружины 22 выдвигается и через звенья 23, 20 и 19 обойма обгонной муфты 18 поворачивается в направлении против часовой стрелки. Пружина 10 будет стремиться сжаться и повернуть вал 1 в направлении против часовой стрелки, чему будет препятствовать обгонная муфта 17. Поэтому вал 1 при повороте обоймы обгонной муфты в направлении против часовой стрелки останется неподвижным. Далее по команде блока управления 24 электромагнит снова включается, втягивается якорь, происходит следующий поворот вала 1 в направлении по часовой стрелке и растяжение пружины 10. Включения электромагнита 21 будут происходить до тех пор, пока фланец 7 не достигнет упора 16 и пружина 10 растянется до рабочего состояния. По команде блока управления 24 выключается муфта 12 и фланец 8 присоединяется к валу 3. Устройство находится в состоянии готовности совершать рабочие шаговые повороты стола 2.
Повороты стола 2 в номинальном режиме происходят следующим образом. Для выполнения поворота стола 2 в направлении по часовой стрелке по команде блока управления 24 включается муфта 11, отсоединяя фланец 7 от вала 1. Пружина 10, сжимаясь, будет поворачивать фланец 8 вместе с валом 3 в направлении по часовой стрелке. Через цепную передачу 4, 5, 6 вал 1 вместе с поворотным столом 2 будет также поворачиваться в направлении по часовой стрелке. Фланец 7 будет поворачиваться в направлении против часовой стрелки, но т.к. он отсоединен от вала 1, поворачивающегося в направлении по часовой стрелке, это не будет препятствовать работе устройства. Момент силы пружины 10 на фланце 7 через зубчатую передачу 13, 14 будет способствовать движению фланца 8 в направлении по часовой стрелке, а вместе с ним и движению вала 3, вала 1 и поворотного стола 2. После поворота стола 2 на половину угла его шагового поворота пружина 9 будет растягиваться и начнется этап торможения. Во время поворота стола 2 по команде блока управления 24 электромагнит 21 включится и его якорь, втягиваясь, через систему рычагов 23, 20, 19 будет способствовать повороту вала 1, а вместе с ним и стола 2 в направлении по часовой стрелке. При достижении фланцем 7 упора 15 движение стола 2 прекратится. Растянутая пружина 9 будет стремиться повернуть фланец 8, валы 3 и 1 в направлении против часовой стрелки, но обгонная муфта 17 будет этому препятствовать. Во время выстоя муфта 11 выключается и, тем самым, фланец 7 подсоединяется к валу 1.
Для выполнения следующего движения включается муфта 12, отсоединяя фланец 8 от вала 3. Пружина 9, сжимаясь, будет поворачивать фланец 7 вместе с валом 1 и столом 2 в направлении по часовой стрелке. Момент силы пружины 9 на фланце 8 через зубчатую передачу 13, 14 будет способствовать этому повороту. После поворота фланца 7 на половину угла шага поворота стола 2 пружина 10 начнет растягиваться и начнется этап торможения. Во время поворота стола 2 по команде блока управления 24 электромагнит 21 включится и его якорь, втягиваясь, через систему рычагов 23, 20, 19 будет способствовать повороту вала 1, а вместе с ним и стола 2 в направлении по часовой стрелке. При достижении фланцем 7 упора 16 движение стола 2 прекратится. Растянутая пружина 10 будет стремиться повернуть фланец 7 и вал 1 в направлении против часовой стрелки, но обгонная муфта 17 будет этому препятствовать. Во время выстоя муфта 12 выключается и, тем самым, фланец 8 подсоединяется к валу 3.
Далее циклы повторяются.
Использование привода, структура которого включает электромагнит и шестизвенный механизм, с помощью которого момент, создаваемый электромагнитом на выходном валу, значительно увеличивается в конце хода якоря и превосходит момент, создаваемый пружинами на выходном валу, позволяет приводить систему в исходное состояние из любого ее положения. Это позволяет приводить устройство в рабочее состояние после аварийных остановок в произвольном положении выходного звена. Использование электромагнита в качестве энергоносителя позволяет упростить алгоритм и систему управления. Все это способствует повышению надежности работы транспортного устройства.
Источники информации
1. Кожевников С.Н. Теория механизмов и машин. М., Машиностроение, 1973. C.323-339.
2. Патент Российской Федерации 2056261, Кл. B 23 Q 16/02, 1996.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАГНИТОПРУЖИННЫЙ ПРИВОД | 2006 |
|
RU2312781C1 |
| Модуль робота | 1990 |
|
SU1722809A1 |
| РЕКУПЕРАТОР АВТОМОБИЛЯ | 2007 |
|
RU2346196C1 |
| Поворотное устройство | 1991 |
|
SU1810683A1 |
| РЕКУПЕРАТОР ТЕЛЕЖКИ ЖЕЛЕЗНОДОРОЖНОГО ВАГОНА | 2002 |
|
RU2222737C2 |
| Модуль промышленного робота | 1990 |
|
SU1715578A1 |
| Механизм сцепления | 1980 |
|
SU985507A1 |
| Швейный полуавтомат для шитья по контуру | 1989 |
|
SU1730280A1 |
| Соединительный механизм | 1983 |
|
SU1115999A1 |
| РЕКУПЕРАТОР ТРАНСПОРТНОГО СРЕДСТВА | 1995 |
|
RU2117836C1 |
Изобретение относится к машиностроению и может быть использовано в конструкциях транспортных средств, а именно в конструкциях автоматических линий и роботизированных комплексов для шагового перемещения различных предметов. В устройстве периодического перемещения привод включает укрепленную на одном из валов дополнительную обгонную муфту, укрепленный на корпусе электромагнит, якорь которого с помощью тяги шарнирно связан с двумя распорными звеньями, одно из которых шарнирно укреплено на корпусе, а второе шарнирно укреплено на обойме обгонной муфты. Обеспечивается повышение надежности транспортного устройства. 2 ил.
Устройство периодического поворотного перемещения в конструкциях автоматических линий и роботизированных комплексов, содержащее установленные в корпусе кинематически связанные с возможностью вращения в одном направлении два вала, на которых укреплены подпружиненные относительно друг друга в обоих угловых направлениях фланцы, присоединяемые к валам с помощью управляемых сцепных муфт, размещенную на одном из валов обгонную муфту, привод, отличающееся тем, что привод содержит укрепленную на одном из валов дополнительную обгонную муфту, укрепленный на корпусе электромагнит, к якорю которого прикреплена тяга, шарнирно соединенная с двумя распорными звеньями, одно из которых шарнирно укреплено на корпусе, а второе шарнирно укреплено на обойме дополнительной обгонной муфты.
| RU 2056261 C1, 20.03.1996 | |||
| ПОВОРОТНО-ДЕЛИТЕЛЬНОЕ УСТРОЙСТВО | 1992 |
|
RU2057630C1 |
| Поворотный делительный стол | 1977 |
|
SU692716A1 |
| JP 2003207035 А, 25.07.2003. | |||

