Изобретение относится к способам обработки цифровых изображений, в частности к способу определения геометрических смещений сенсоров в плоскопанельном детекторе рентгеновского изображения по изображению тест-объекта.
В настоящее время различные производители медицинского оборудования разрабатывают плоскопанельные детекторы рентгеновского излучения с рабочим полем вплоть до нескольких десятков сантиметров. Некоторые из таких детекторов состоят из нескольких сенсоров, жестко закрепленных на общей подложке. Например, в [патент US №6895077, опубл. 17.05.2005] описан рентгеновский аппарат, в котором в качестве возможных вариантов может использоваться детектор из четырех (два на два) или девяти (три на три) ПЗС-сенсоров. В техническом решении [патент US №7663115, опубл. 16.02.2010] описан детектор, состоящий из шести КМОП-сенсоров с рабочим полем 20×30 см. На рентгеновском изображении, полученном с помощью такого составного детектора, в области, соответствующей стыкам сенсоров, присутствуют различного рода артефакты, которые возникают по следующим причинам. Во-первых, сенсоры по своим светочувствительным характеристикам отличаются друг от друга. Во-вторых, в идеальном детекторе между сенсорами не должно быть зазоров и каждый столбец (строка) сенсора должен переходить в соответствующий столбец (строку) соседнего сенсора. Понятно, что в реальных детекторах сенсоры всегда будут геометрически смещены относительно своего идеального положения, что также сказывается на качестве изображения.
Обе эти причины приводят к заметным артефактам на изображении и к необходимости их коррекции. Для коррекции таких изображений важно понимать также природу таких артефактов и иметь дополнительные измерения, численно характеризующие эти артефакты.
Среди способов коррекции изображений известен, например, способ коррекции граничных артефактов в рентгеновском изображении [патент US №8073191, опубл. 06.12.2011], основанный на применении многомерной гипотезы скрытой Марковской модели. В описании к техническому решению указывается, что ширина зоны артефакта может достигать нескольких пикселей, но основное внимание в способе уделяется коррекции собственно артефактов, как таковых.
Плоскопанельный детектор представляет собой цельное устройство и в собранном виде не допускает прямого измерения смещений между сенсорами. Поэтому возможны два способа определения геометрических смещений. Первый способ заключается в том, что смещение сенсоров определяется прямым измерением, используя измерительное оборудование, на этапе сборки детектора. Например, оптический микроскоп Galileo AV350 [Galileo AV350 Multi-Sensor Vision System, the L.S. Starrett Company] позволяет проводить измерения расстояний с точностью до нескольких мкм. Второй способ заключается в определении смещений по рентгеновскому изображению тест-объекта.
Недостаток прямого измерения смещений заключается в том, что, во-первых, вследствие механических напряжений расположение сенсоров в собранном детекторе может отличаться от значений, измеренных по детектору в разобранном виде. Во-вторых, если необходимо провести такие измерения для уже собранного детектора, то разбирать детектор следует только в специально оборудованном для этого помещении. Обе эти причины практически исключают возможность определения смещений сенсоров за пределами их производства, например в медицинской клинике.
В аналогичных ситуациях, когда нежелательно разбирать устройство, часто используют различные косвенные способы. Например, известен способ определения геометрических смещений сенсоров в сканере по изображению тест-объекта [патент US №6600568, опубл. 29.07.2003]. В этом способе производят сканирование тест-объекта с изображением определенного образа, на скане выбирают участки изображения, соответствующие различным сенсорам, и по их смещениям вычисляют смещения сенсоров.
В заявляемом техническом решении рассматривается способ определения геометрических смещений сенсоров в плоскопанельном детекторе рентгеновского излучения по изображению тест-объекта. Экспериментально показана возможность определения геометрических смещений сенсоров по изображению тест-объекта, который включает в себя подложку из рентгенопрозрачного материала и объекты «острый край». В зонах интереса рентгеновского изображения тест-объекта идентифицируют пиксели, соответствующие острому краю каждого объекта «острый край», формируют данные для вычислений и определяют геометрические смещения сенсоров из условия минимума целевого функционала с ограничениями на указанные смещения.
Автору не известен из уровня техники способ определения смещения сенсоров, аналогичный заявляемому.
Техническая задача, на решение которой направлено заявляемое изобретение, заключается в расширении арсенала средств определения геометрических смещений сенсоров, а более конкретно, в создании нового способа определения геометрических смещений сенсоров по изображению тест-объекта, позволяющего с достаточной точностью определять смещение сенсоров в плоскопанельном детекторе рентгеновского излучения.
Техническим результатом является расширение арсенала технических средств определения геометрических смещений сенсоров в плоскопанельном детекторе рентгеновского излучения и возможность определения смещения сенсоров с высокой точностью.
Указанный технический результат достигается в способе определения геометрических смещений сенсоров в плоскопанельном детекторе рентгеновского изображения, содержащем по меньшей мере два сенсора, закрепленных на монтажной панели с обеспечением на стыке сенсоров технологического зазора между сенсорами, заключающемся в том, что на рабочей поверхности детектора размещают тест-объект, включающий по меньшей мере два объекта «острый край», соответствующих положению технологического зазора между указанными сенсорами. Поток рентгеновского излучения направляют на тест-объект и получают его рентгеновское изображение. На полученном изображении идентифицируют пиксели, соответствующие изображению острого края каждого объекта «острый край», по которым определяют геометрические смещения сенсоров из условия минимума целевого функционала с линейными и нелинейными ограничениями на указанные смещения. При этом линейные ограничения соответствуют геометрическим смещениям сенсоров, расположенных рядом друг с другом по горизонтали или вертикали, а нелинейные ограничения соответствуют геометрическим смещениям сенсоров, расположенных рядом друг с другом по диагонали.
Для идентификации пикселей, соответствующих изображению острого края, вычисляют модуль градиента изображения и идентифицируют пиксели с модулем градиента, выше заданного порогового значения, формируют данные из координат таких пикселей и весовых множителей, при этом в качестве весовых множителей используют модуль градиента пиксела.
В качестве целевого функционала используют метод наименьших квадратов.
Целесообразно тест-объект выполнить в виде подложки из рентгенопрозрачного материала, на поверхность которой наносят разметку в виде прямолинейных отрезков, соответствующих стыкам сенсоров. Число стыков больше или равно одному в зависимости от числа сенсоров. На каждом из указанных отрезков размещают по крайней мере два объекта «острый край» таким образом, что прямолинейные острые края смежных объектов перпендикулярны друг другу, а угол между острым краем каждого объекта и соответствующим отрезком равен преимущественно сорок пять градусов, причем острые края объектов делят упомянутый отрезок на равные, по существу, части.
Указанная совокупность существенных признаков позволяет достичь технического результата, который заключается в определении геометрических смещений сенсоров с необходимой точностью.
Осуществление способа определения геометрических смещений сенсоров плоскопанельного детектора поясняется следующими чертежами.
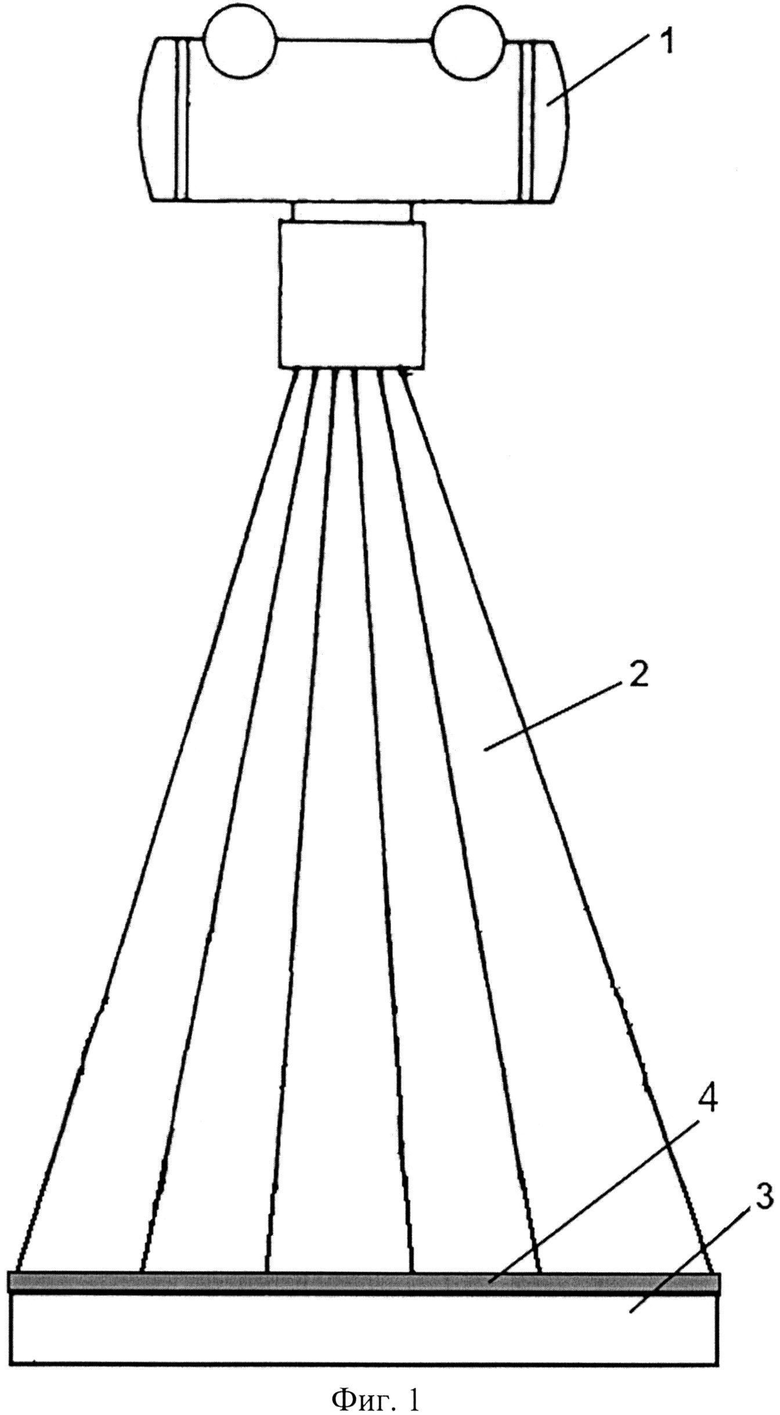
На фиг.1 показано устройство для реализации способа, где позициями обозначены:
1 - источник рентгеновского излучения;
2 - поток рентгеновского излучения;
3 - детектор рентгеновского излучения;
4 - тест-объект.
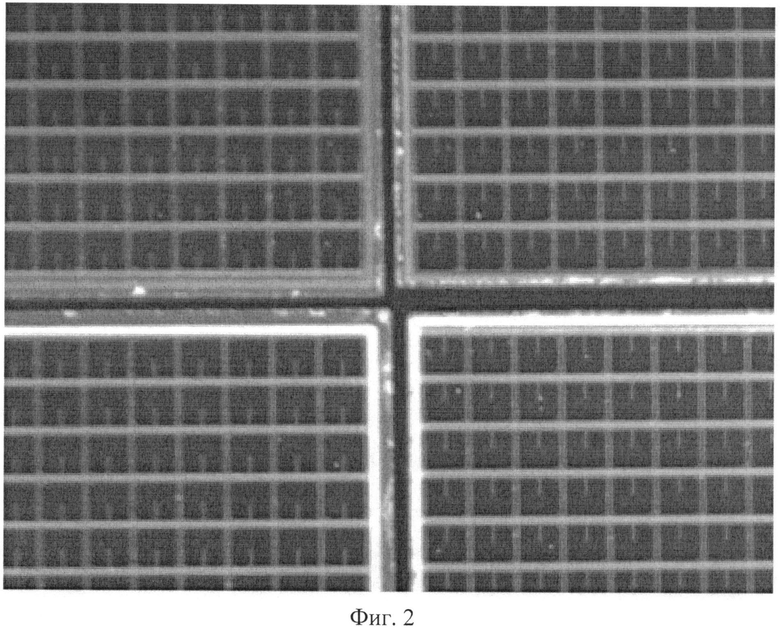
На фиг.2 приведена фотография сенсоров, закрепленных на общей подложке. На фотографии видно, что сенсоры не прилегают плотно друг к другу и между ними присутствуют зазоры. Причем смещения сенсоров относительно заданного положения приводят к тому, что сенсоры оказываются смещены по горизонтали, по вертикали, могут быть также угловые смещения сенсоров, что приводит к образованию технологических зазоров между сенсорами, увеличенных или уменьшенных по сравнению с заданными и неравномерных по ширине.
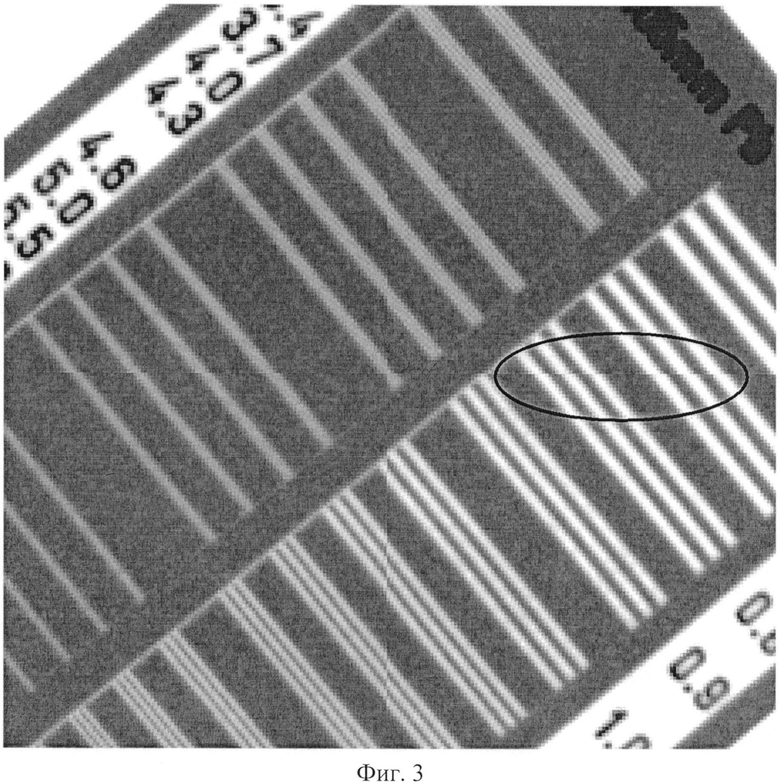
На фиг.3 представлена увеличенная часть рентгеновского изображения миры на стыке сенсоров детектора. Овалом отмечен участок изображения, на котором артефакты в зоне стыков сенсоров наиболее заметны.
На фиг.4 приведено схематическое изображение тест-объекта 4, где позициями обозначены:
I и II - области изображения, соответствующие сенсорам детектора;
5 - подложка;
6 - прямолинейный отрезок, соответствующий стыкам сенсоров детектора;
7-8 - объекты «острый край» и соответствующие им зоны интереса.
Данный тест-объект предназначен для определения смещений сенсоров детектора, состоящего из двух сенсоров.
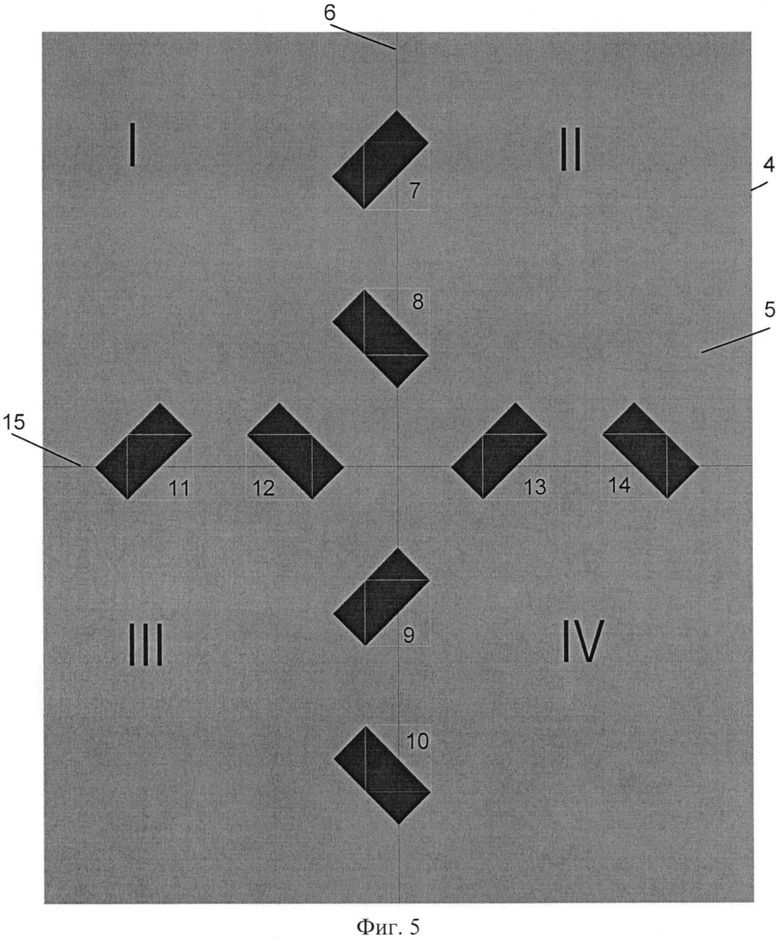
На фиг.5 приведено схематическое изображение тест-объекта 4, где позициями обозначены:
I-IV - области изображения, соответствующие сенсорам детектора;
5 - подложка;
6, 15 - прямолинейные отрезки, соответствующие стыкам сенсоров детектора;
7-14 - объекты «острый край» и соответствующие им зоны интереса.
Данный тест-объект предназначен для определения смещений сенсоров детектора, состоящего из четырех сенсоров (два на два сенсора).
На фиг.6 показан модуль градиента изображения объекта «острый край».
На фиг.7 представлен участок рентгеновского изображения тест-объекта со стыками соседних сенсоров. Точками отмечены пиксели, по которым вычисляют смещения сенсоров. На вертикальной и горизонтальной осях приведена нумерация пикселей.
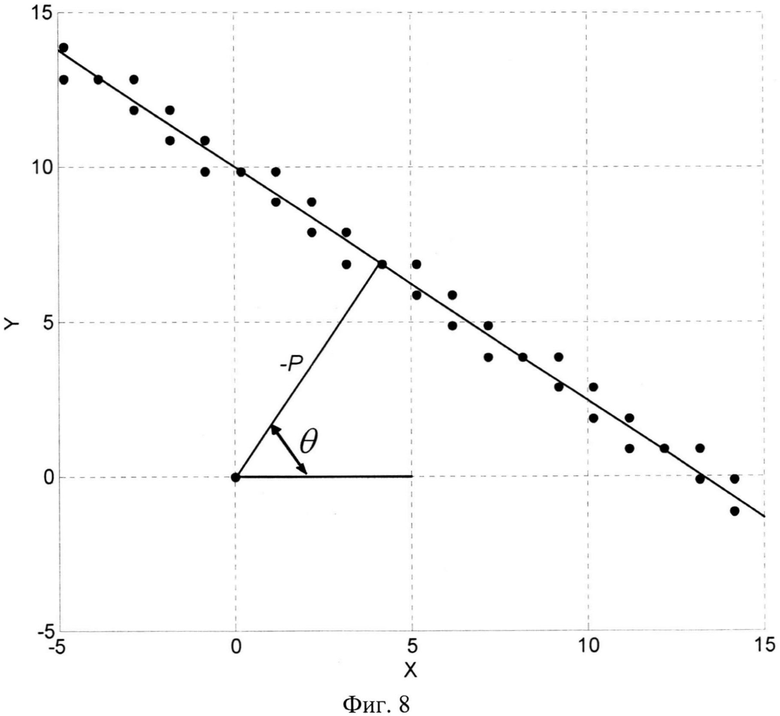
На фиг.8 приведены пояснения к идентификации прямой по заданному набору точек. Точками обозначен набор данных (x, y), по которым построена прямая с параметрами (p, θ).
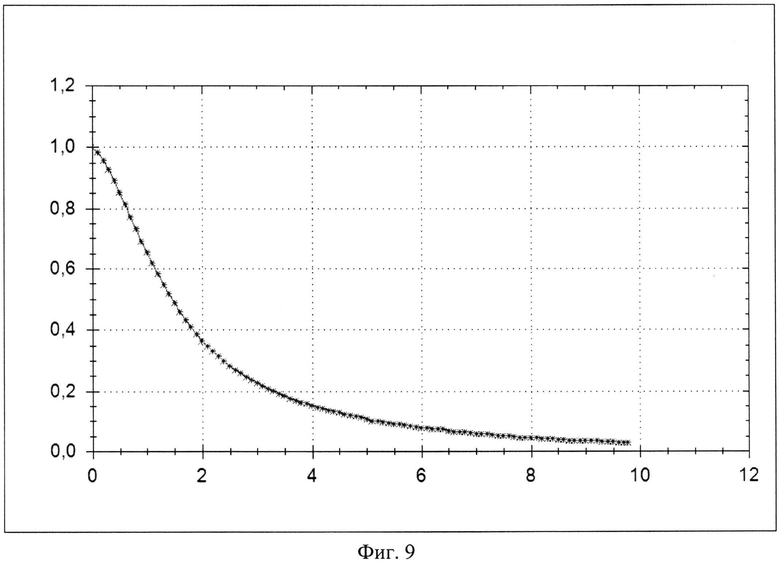
На фиг.9 приведен график функции передачи модуляции детектора, по горизонтали отложены значения пространственных частот в мм-1. На вертикальной оси отложены значения функции передачи модуляции.
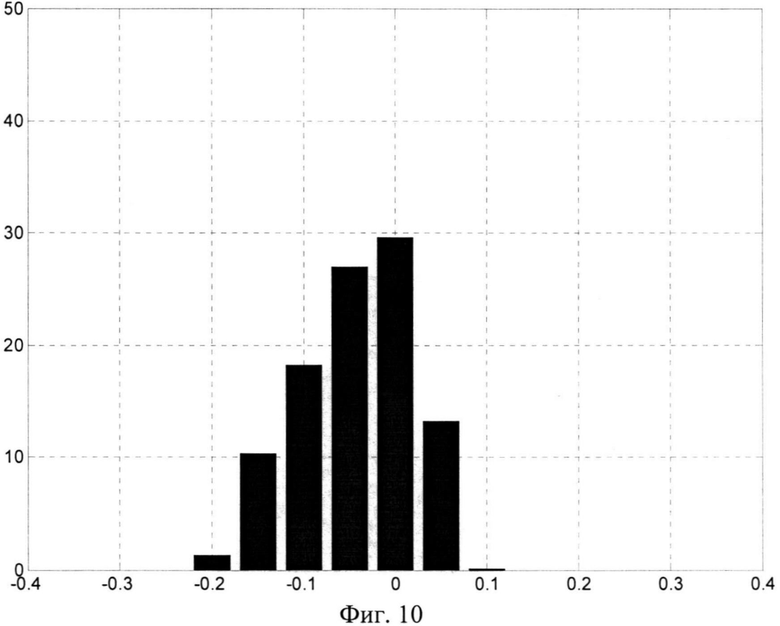
На фиг.10 представлена гистограмма абсолютных ошибок смещений сенсоров по оси x. На горизонтальной оси отложены значения абсолютной ошибки в пикселах, а на вертикальной оси - соответствующие значения вероятности в процентах.
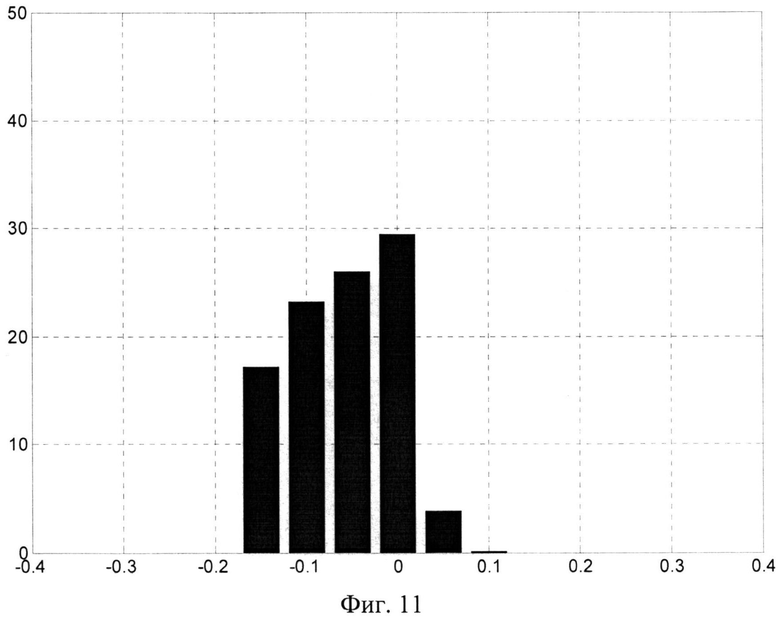
На фиг.11 представлена гистограмма абсолютных ошибок смещений сенсоров по оси y. На горизонтальной оси отложены значения абсолютной ошибки в пикселах, а на вертикальной оси - соответствующие значения вероятности в процентах.
Рентгеновское изображение получают с помощью устройства, показанного на фиг.1. Устройство содержит источник рентгеновского излучения 1. Поток рентгеновского излучения 2 направлен на рабочую сторону детектора рентгеновского изображения 3, на которой размещен тест-объект 4. Детектор 3 содержит сцинтилляционный экран (на чертеже не показан), оптически связанный с активной областью детектора. Сцинтилляционный экран преобразует рентгеновское излучение 2 в видимый свет, сенсоры детектора регистрируют его в виде цифрового изображения. Согласно заявляемому способу на рабочей поверхности детектора 3, содержащего по меньшей мере два сенсора, закрепленных на монтажной панели с обеспечением на стыке сенсоров технологического зазора между сенсорами, размещают тест-объект 4 (фиг.4). Поток рентгеновского излучения направляют на рабочую сторону детектора и получают рентгеновское изображение тест-объекта.
Опишем способ определения геометрических смещений сенсоров плоскопанельного детектора по рентгеновскому изображению тест-объекта.
На рентгеновском изображении изображение острого края должно с достаточной точностью аппроксимироваться прямолинейным отрезком. Суть метода заключается в выполнении следующих этапов:
1) Для каждой зоны интереса формируют набор данных из координат пикселей и весовых множителей, которые соответствуют изображению острого края. В качестве весовых множителей используют модуль градиента соответствующего пиксела.
2) Определяют такие преобразования координат, т.е. смещения сенсоров, чтобы точки, соответствующие одному и тому же острому краю, легли на прямую линию с наименьшей ошибкой. В качестве ошибки, т.е. целевого функционала, используют сумму взвешенных квадратов остатков.
Опишем способ формирования данных для каждой зоны интереса, например позиции 7-14, отмеченные на фиг.5 для детектора из 2×2 сенсоров. Стандартным образом [Р. Гонсалес, Р. Вудс, С. Эддинс, Цифровая обработка изображений в среде MATLAB, Техносфера, 2006., стр.401] вычисляют модуль градиента изображения, используя одномерный линейный фильтр радиуса r
Каждому пикселю с координатами (xi, yi) присваивают вес ωI, равный модулю градиента. В последующих вычислениях будем использовать только такие пикселы, веса которых выше заданного порогового значения k×ωmax от максимального значения веса пиксела ωmax в соответствующей зоне интереса. Константа k и параметры линейного фильтра (r, σ) подбирают в ходе численных экспериментов. На фиг.6 приведена часть изображения модуля градиента. На фиг.7 точками отмечены пикселы, веса которых выше заданного порогового значения.
Опишем способ идентификации прямой на плоскости по данным (xi, yi, ωi), где (xi, γi) - координаты и ωi - веса пикселей. Запишем уравнение прямой (p, θ) в следующем виде:
p+x×cosθ+y×sinθ=0
Параметры прямой (θ, p) определяют из условия минимума функционала

который есть сумма средневзвешенных квадратов расстояний от каждого пикселя до прямой (θ, p). Этот же функционал можно представить в матричном виде
здесь τ=(cosθ, sinθ) и Xi=(xi, yi)T. Значения параметров θ и p, доставляющие минимум функционалу E(θ, p), определяются выражениями
где 
Перейдем к описанию следующего этапа определения смещений сенсоров. Для простоты сначала опишем способ определения смещений для детектора типа 1×2 (тест-объект представлен на фиг.4). Пусть 


здесь матрица О и вектор D определяют преобразование координат (поворот и смещение) на плоскости
Запишем целевой функционал в виде

здесь τR=(cosθR, sinθR) и 
наложить дополнительные ограничения. Поскольку в реальном детекторе углы поворота сенсоров достаточно малы, мы будем считать их равными нулю. Тогда граничные условия записываются особенно просто и получают следующую задачу оптимизации с одним линейным ограничением для x компоненты вектора DII:
Перейдем к описанию определения смещений сенсоров для детектора с произвольным числом сенсоров. Пусть N означает число сенсоров по вертикали и M - число сенсоров по горизонтали. Для нумерации сенсоров в детекторе будем использовать мультииндекс (n, m), где n - номер сенсора по вертикали (сверху вниз) и m - номер сенсора по горизонтали (слева направо).
Чтобы определить геометрию детектора с произвольным числом сенсоров, минимизируют целевой функционал следующего вида:
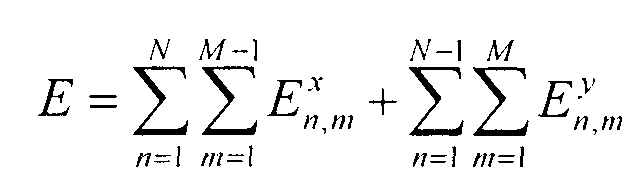
Слагаемые 



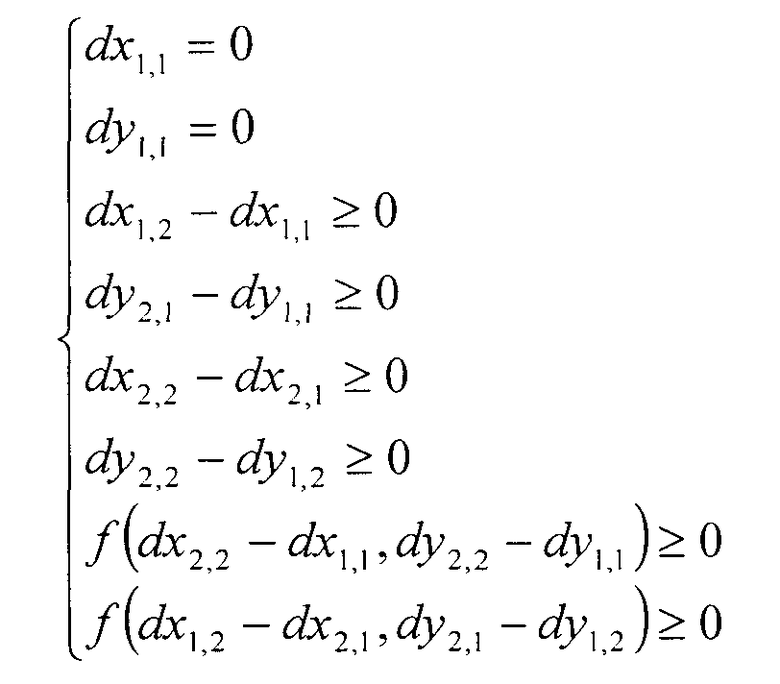
К граничным условиям, вместе с ограничениями по вертикали и горизонтали, следует добавить ограничения для сенсоров, которые расположены на диагонали по отношению друг к другу как, например, сенсоры (1, 1) и (2, 2). В результате получаем следующую задачу оптимизации с линейными и нелинейными ограничениями:
E→min
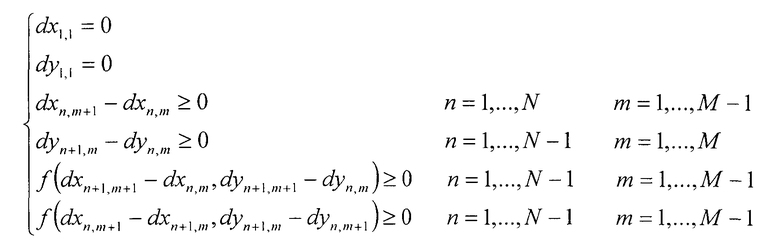
Первые два условия dx1,1=0 и dy1,1=0 появляются вследствие того, что левый верхний сенсор выбран в качестве системы координат, относительно которой производят все вычисления. Третья группа условий dxn,m+1-dxn,m≥0 - суть ограничения для смещений сенсоров, расположенных по горизонтали рядом друг с другом. Четвертая группа условий dxn+1,m-dxn,m≥0 - суть ограничения для смещений сенсоров, расположенных по вертикали рядом друг с другом. Пятая и шестая группы - суть ограничения для сенсоров, которые расположены на диагонали рядом друг с другом. Пятая группа условий - суть ограничения для смещений сенсора (n+1, m+1) по отношению к сенсору (n, m). Шестая группа условий - суть ограничения для смещений сенсора (n+1, m) по отношению к сенсору (n, m+1). В заявляемом способе мы использовали функцию f(x, y) следующего вида:
f(x, y}=1-2×logsig(-gain×(x-offset))×logsig(-gain×(y-offset))
здесь logsig(x)=1/(1+exp(-x)) - сигмоидальная функция. При значениях gain = 100 и offset = 0.01 функция f(x, y) обладает следующими очевидными свойствами:

Эти свойства гарантированно исключают пересечение сенсоров, которые лежат на диагонали по отношению друг к другу. Для решения поставленной задачи используют стандартные градиентные методы численной оптимизации с нелинейными ограничениями. В качестве начальных условий для смещений сенсоров при решении поставленной задачи мы использовали следующие значения: 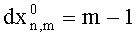

Для определения смещений сенсоров в плоскопанельном детекторе, состоящем из четырех (два на два) сенсоров, тест-объект 4 (фиг.5) размещают на рабочей поверхности детектора 3. На фиг.5 представлено схематичное изображение тест-объекта, где позициями I-IV обозначены области, соответствующие сенсорам детектора, а позиции 7-14 соответствуют объектам «острый край». Рамками отмечены зоны интереса изображения, по которым вычисляют смещения сенсоров. Тест-объект выполнен в виде подложки 5 из рентгенопрозрачного материала, например органического стекла, размер которой соответствует размеру конкретного детектора 3. На подложке 5 нанесены прямолинейные отрезки 6 и 15. Прямолинейные отрезки 6 и 15 на тест-объекте представляют собой по существу идеальные стыки сенсоров, когда сенсоры были бы размещены без необходимых технологических зазоров в отсутствие смещений сенсоров относительно друг друга. В реальных детекторах при сборке обеспечивают технологические зазоры между сенсорами для предотвращения повреждений сенсоров в результате возможных температурных расширений. Кроме того, из-за неточности при сборке сенсоры геометрически смещаются относительно заданного положения. Прямолинейные отрезки 6 и 15 ориентированы взаимно перпендикулярно и расположены на тест-объекте над заданной областью технологических зазоров. На указанных отрезках размещают и фиксируют объекты «острый край» 7-14, обеспечивая соответствие положения указанных объектов области технологического зазора. Объект «острый край» представляет собой пластину из вольфрама с прямолинейным острым краем. Пластина имеет размеры 20 мм на 10 мм (при размере пиксела детектора 50 мкм) и толщину 1 мм. Выполненную подобным образом пластину используют, например, в тест-объекте для оценки функции передачи модуляции приемников рентгеновского изображения по методу «острого края» (ГОСТ Р МЭК 62220-1-2006). Вольфрамовые пластины размещают на прямолинейных отрезках 6 и 15 подложки 5. Наилучшим вариантом размещения пластин является вариант, когда острые края соседних пластин перпендикулярны друг другу, угол между острым краем каждой пластины и соответствующим прямолинейным отрезком равен, по существу, сорока пяти градусам, острые края пластин делят указанный прямолинейный отрезок на равные по длине части.
Чтобы определить геометрию всего детектора в целом, минимизируют целевой функционал следующего вида (N=2 и М=2):
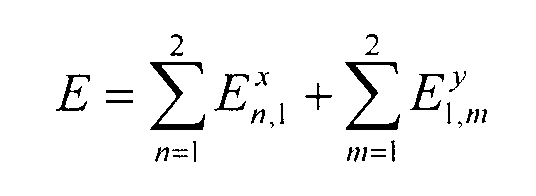
Слагаемое 



E→min
Первые два условия dx1,1=0 и dy1,1=0 появляются вследствие того, что левый верхний сенсор выбран в качестве системы координат. Третье условие есть ограничение для смещений второго сенсора по отношению к первому сенсору, четвертое - для смещений третьего сенсора по отношению к первому сенсору, пятое и шестое - для смещений четвертого сенсора по отношению ко второму и третьему сенсорам. Седьмое условие есть ограничение для смещений четвертого сенсора по отношению к первому сенсору, и восьмое условие есть ограничение для смещений третьего сенсора по отношению ко второму сенсору. Для решения поставленной задачи используют стандартные градиентные методы численной оптимизации с ограничениями.
Как было отмечено выше, плоскопанельный детектор в собранном виде не допускает прямого измерения смещений сенсоров. По этой причине работоспособность заявляемого способа была проверена на модельных изображениях. В численных экспериментах моделировались 16- разрядные рентгеновские изображения тест-объекта с заранее известным смещением сенсоров со следующими характеристиками изображения:
1) уровень сигнала и шума в области изображения воздуха 30000 и 50 единиц соответственно;
2) уровень сигнала и шума в области изображения вольфрамовой пластины 650 и 15 единиц соответственно;
3) функция передачи модуляции модельных изображений соответствует значениям, измеренным по реальному изображению, и приведена на фиг.9. Методика измерения функции передачи модуляции соответствует стандарту ГОСТ Р МЭК 62220-1-2006.
Шум, накладываемый на модельное изображение, соответствует белому шуму с нормальным распределением. Указанные значения соответствуют реальному рентгеновскому изображению тест-объекта. Смещения сенсоров 

Использование описываемого способа определения геометрического смещения сенсоров в плоскопанельном детекторе рентгеновского излучения по изображению тест-объекта позволяет просто, эффективно и с высокой точностью проводить оценку геометрического смещения сенсоров без разборки детектора. Предложенный способ расширяет арсенал технических средств определенного назначения.
В приведенном выше описании изобретения, охарактеризованном в независимом пункте формулы, показана возможность его осуществления с помощью приведенных в данном описании и известных средств и методов. Следовательно, заявленный способ соответствует условию промышленной применимости.
Предлагаемое техническое решение раскрыто в описании с возможными примерами его осуществления, которые должны рассматриваться как иллюстрации способа, но не как его ограничение. На основе данного описания специалисты в данной области техники могут предложить другие варианты в рамках изложенной формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОГО ПОИСКА И КОРРЕКЦИИ ОСИ ВРАЩЕНИЯ ОБЪЕКТА | 2023 |
|
RU2816842C1 |
| Способ определения функции рассеяния точки системы рентгеновской визуализации | 2019 |
|
RU2717563C1 |
| СПОСОБ РЕНТГЕНОВСКОЙ ТОМОГРАФИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2505800C2 |
| Способ детекции протяженных линейных объектов на изображении | 2022 |
|
RU2802991C1 |
| СПОСОБ РЕКОНСТРУКЦИИ ИЗОБРАЖЕНИЙ ПРОДОЛЬНЫХ СРЕЗОВ ОБЪЕКТА | 2013 |
|
RU2559688C2 |
| Способ калибровки источника рентгеновского излучения компьютерного томографа | 2024 |
|
RU2833551C1 |
| Способ и устройство для скоростного исследования протяженных объектов, находящихся в движении, с помощью частотных импульсных источников рентгеновского излучения и электронных приемников излучения | 2019 |
|
RU2720535C1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ И ОБРАБОТКИ ЦИФРОВОГО ИЗОБРАЖЕНИЯ НА ОСНОВЕ МНОГОЦЕНТРИЧНОЙ РАЗВЕРТКИ | 2012 |
|
RU2517715C2 |
| СПОСОБ ГРАДУИРОВКИ РАСПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО РАЗРЕШЕНИЯ УСТРОЙСТВА ПОЛУЧЕНИЯ ЦИФРОВОГО РЕНТГЕНОВСКОГО ИЗОБРАЖЕНИЯ | 2024 |
|
RU2826349C1 |
| Способ измерения дальности от маневрового тепловоза до вагона на прямолинейном участке железнодорожного пути | 2020 |
|
RU2750364C1 |


Использование: для определения геометрических смещений сенсоров в плоскопанельном детекторе рентгеновского изображения. Сущность изобретения заключается в том, что на рабочей поверхности детектора размещают тест-объект, включающий по меньшей мере два объекта «острый край», соответствующих положению технологического зазора между указанными сенсорами, поток рентгеновского излучения направляют на тест-объект, получают его рентгеновское изображение, на полученном изображении идентифицируют пиксели, соответствующие изображению острого края каждого объекта «острый край», по которым определяют геометрические смещения сенсоров из условия минимума целевого функционала с ограничениями на указанные смещения, причем ограничения включают линейные ограничения, соответствующие геометрическим смещениям сенсоров, расположенных рядом друг с другом по горизонтали или вертикали, и нелинейные ограничения, соответствующие геометрическим смещениям сенсоров, расположенных рядом друг с другом по диагонали. Технический результат: расширение арсенала технических средств определения геометрических смещений сенсоров в плоскопанельном детекторе рентгеновского излучения и возможность определения смещения сенсоров с высокой точностью. 3 з.п. ф-лы, 11 ил.
1. Способ определения геометрических смещений сенсоров в плоскопанельном детекторе рентгеновского изображения, содержащем по меньшей мере два сенсора, закрепленных на монтажной панели с обеспечением на стыке сенсоров технологического зазора между сенсорами, заключающийся в том, что на рабочей поверхности детектора размещают тест-объект, включающий по меньшей мере два объекта «острый край», соответствующих положению технологического зазора между указанными сенсорами, поток рентгеновского излучения направляют на тест-объект, получают его рентгеновское изображение, на полученном изображении идентифицируют пиксели, соответствующие изображению острого края каждого объекта «острый край», по которым определяют геометрические смещения сенсоров из условия минимума целевого функционала с ограничениями на указанные смещения, причем ограничения включают линейные ограничения, соответствующие геометрическим смещениям сенсоров, расположенных рядом друг с другом по горизонтали или вертикали, и нелинейные ограничения, соответствующие геометрическим смещениям сенсоров, расположенных рядом друг с другом по диагонали.
2. Способ по п.1, отличающийся тем, что для идентификации пикселей, соответствующих изображению острого края, вычисляют модуль градиента изображения и отбирают пиксели с модулем градиента выше заданного порогового значения, формируют данные из координат таких пикселей и весовых множителей, в качестве весовых множителей используют модуль градиента пиксела.
3. Способ по п.1, отличающийся тем, что в качестве целевого функционала используют метод наименьших квадратов.
4. Способ по п.1, отличающийся тем, что тест-объект представляет собой подложку из рентгенопрозрачного материала, на поверхность которой наносят разметку в виде прямолинейных отрезков, соответствующих стыкам смежных сенсоров, причем число стыков больше или равно одному в зависимости от числа сенсоров, на каждом из указанных отрезков размещают по крайней мере два объекта «острый край» таким образом, что прямолинейные острые края смежных объектов перпендикулярны друг другу, а угол между острым краем каждого объекта и соответствующим отрезком равен преимущественно сорок пять градусов, причем острые края объектов делят упомянутый отрезок на равные, по существу, части.
| US 6600568B1, 29.07.2003 | |||
| JP 2001353140A, 25.12.2001 | |||
| JP 2009045470A, 05.03.2009 | |||
| РЕНТГЕНОТЕЛЕВИЗИОННЫЙ ИЗМЕРИТЕЛЬНЫЙ МИКРОСКОП | 0 |
|
SU278186A1 |
| ШАБЛОН ПОЗИЦИОНИРОВАНИЯ | 2006 |
|
RU2431804C2 |

