Область техники
Настоящее изобретение относится к устройству, способу и системе для определения положения объекта и, в частности, к решению на основе видения, использующему шаблон, содержащий данные абсолютного положения.
Уровень техники
Много разных типов устройств управления было сконструировано для разных целей. Наиболее широко распространенным устройством управления является так называемая мышь, выдающая переменные позиционирования в двух измерениях для использования при управлении работой приложений на компьютере. Другие интерфейсные устройства управления включают в себя так называемый джойстик, который выдает переменные позиционирования также в двух измерениях от рукоятки; однако благодаря использованию дополнительных кнопок совместно с рукояткой можно увеличить количество "переменных позиционирования", но следует понимать, что это устройство, с физической точки зрения, измеряет только переменные позиционирования в двух измерениях. Шаровой манипулятор также выдает данные в двух измерениях; в игровой панели часто используется маленький джойстик наподобие ручки для измерения переменных позиционирования, что позволяет расширять диапазон функциональных возможностей пульта управления на большее количество данных управления благодаря использованию дополнительных кнопок; рулевое колесо (для компьютерных игр) выдает данные в одном измерении.
Во многих найденных решениях устройство управления выдает лишь относительные измерения, но не абсолютные измерения, поскольку для того чтобы приложение, опирающееся на абсолютные координаты устройства управления, работало правильно, необходимы сложные вычисления для непрерывного отслеживания положения устройства управления. Кроме того, такие устройства необходимо регулярно калибровать, иначе они будут создавать погрешность, которая может быстро стать критической в зависимости от приложения.
В других технических областях, помимо вышеупомянутых устройств управления, данные позиционирования используются для определения положения объекта, и во многих случаях используются решения абсолютного измерения, однако они часто слишком сложны и малоэкономичны для использования в недорогих приложениях. Системы на основе видения использовались ранее и часто используются совместно с опорными точками, например, в системах позиционирования на основе видения для определения положения автомобилей или движущихся объектов. Эти системы можно устанавливать на автомобиле или объекте, определяя положение с использованием опорных точек в окружающей области, или во внешнем положении, определяя положение с использованием опорных точек на автомобиле или объекте. Эти системы обычно довольно сложны и требуют системы высококачественного видения и высокие вычислительные мощности. Такая система представлена в патенте США 5965879, где показан оптический кодер одномерного абсолютного линейного или углового положения. Это решение использует идентичные опорные маркеры для нахождения положения объекта. Положение относительно опорного маркера вычисляется в одном направлении, а именно в направлении движения. Другая подобная система представлена в патенте США 6765195, где показан оптический кодер двухмерного абсолютного положения. Это решение использует два разных опорных маркера для определения положения объекта. Маркеры идентичны по всем кодированным положениям и располагаются строго периодически в каждом направлении движения. Обе эти системы иллюстрируют системы, которые нуждаются в сложных оптических решениях, и где размер шаблонов составляет порядка нескольких микрон. Они не обеспечивают информацию изгиба или кручения.
Сущность изобретения
Таким образом, задачей настоящего изобретения является обеспечение точного и недорогого устройства, которое обеспечивает данные абсолютного положения посредством относительно экономичной и несложной технологии и которое также может обеспечивать даже трех- или четырехмерную информацию положения (x, y, z и поворот). Это достигается в ряде аспектов настоящего изобретения.
Согласно первому аспекту предусмотрена система выявления положения, содержащая:
группу шаблонов, содержащую, по меньшей мере, одну узловую часть и, по меньшей мере, одну информационную часть, причем совокупность групп шаблонов размещена на объекте, положение которого подлежит определению;
по меньшей мере, одно устройство захвата изображения для выявления шаблона; и
вычислительное устройство, анализирующее сигналы от устройства захвата изображения, причем анализы содержат определение геометрических центров в, по меньшей мере, двух направлениях узловых частей шаблона и определение типа части для каждой выявленной части шаблона; причем узловые части обеспечивают положение относительно воспринимающего устройства, и информационные части обеспечивают определение местоположения узловых частей относительно объекта.
Объектом может быть трехмерный объект, причем группа шаблонов обеспечена на искривленной поверхности объекта.
Две линии групп шаблонов могут располагаться, по существу, параллельно друг другу на расстоянии (d) друг от друга в продольном направлении вала. Можно обеспечить две камеры, каждая из которых считывает одну из двух линий групп шаблонов.
Система определения положения может дополнительно содержать, по меньшей мере, одно осветительное устройство. Выходной интенсивностью освещения из осветительного устройства может управлять вычислительное устройство.
Узловые части и информационные части могут содержать, по меньшей мере, одно из следующего: заполненный круг, кольцо и кольцо с центральной меткой; и/или части могут быть закодированы цветом.
Группа шаблонов и камера могут располагаться в кожухе, обеспечивающем защиту от параметров окружающей среды.
Вычислительное устройство может дополнительно быть выполнено с возможностью определения положения центров симметрии узловых точек с использованием алгоритма на основе видения, использующего градиентный анализ. Центр симметрии определяется как для узловых, так и для информационных частей шаблона.
Узловые части могут содержать совокупность разных типов, например заполненную точку, незаполненную точку или незаполненную точку с центральным пятном. Точка может иметь форму, выбранную из следующих форм: круг, прямоугольник, квадрат или треугольник.
Информационные части могут содержать совокупность разных типов, например заполненную точку, незаполненную точку или незаполненную точку с центральным пятном.
Вычислительное устройство может быть выполнено с возможностью определения расстояния между объектом и устройством захвата изображения путем измерения, по меньшей мере, одного из размеров узловой части, размера информационной части, расстояния между двумя узловыми частями, расстояния между двумя информационными частями и расстояния между узловой и информационной частями.
Согласно второму аспекту настоящего изобретения предусмотрен датчик крутящего момента для измерения крутящего момента в объекте, причем датчик содержит:
систему выявления положения, содержащую:
- группу шаблонов, содержащую, по меньшей мере, одну узловую часть и, по меньшей мере, одну информационную часть, причем совокупность групп шаблонов размещена прямо или косвенно на объекте;
- по меньшей мере, одно устройство захвата изображения для выявления шаблона; и вычислительное устройство для анализа сигналов от устройства захвата изображения, причем устройство дополнительно содержит средство для определения геометрических центров в, по меньшей мере, двух направлениях узловых частей шаблона и определения типа части для каждой выявленной части шаблона; причем узловые части выполнены с возможностью обеспечения положения относительно устройства захвата изображения, и информационные части обеспечивают определение местоположения узловых частей относительно объекта;
- по меньшей мере, два рукава, каждый из которых имеет совокупность групп шаблонов, причем рукава смонтированы на объекте; и
в которой система определения положения получает данные положения от каждого рукава, и вычислительное устройство дополнительно содержит средство для выявления углового сдвига между положением рукавов и для определения крутящего момента из углового сдвига.
Согласно еще одному аспекту настоящего изобретения предусмотрен способ определения положения объекта, содержащий этапы, на которых:
выявляют, с помощью воспринимающего устройства, группу шаблонов, находящуюся на объекте;
определяют, с использованием анализа симметрии, в, по меньшей мере, двух направлениях центральные положения узловых точек, образующих часть группы шаблонов;
определяют тип узловой точки;
определяют тип и положение информационных точек, находящихся на объекте; и
определяют абсолютное положение объекта относительно воспринимающего устройства с использованием объединенной информации положения и типа точек для узловых и информационных точек.
Согласно еще одному аспекту настоящего изобретения предусмотрена компьютерная программа, хранящаяся на компьютерно-считываемом носителе, для определения положения объекта путем анализа данных, указывающих группу шаблонов, находящихся на объекте, причем данные поступают от камеры, отличающаяся тем, что компьютерная программа предназначена для определения положения геометрических центров узловых точек в, по меньшей мере, двух направлениях в группе шаблонов для определения положения объекта относительно камеры и дополнительно предназначена для определения типа и относительного положения информационных точек в группе шаблонов для определения местоположения узловых точек относительно объекта.
Положения центров симметрии узловых точек можно определить с использованием алгоритма на основе видения, использующего градиентный анализ.
Согласно еще одному аспекту настоящего изобретения предусмотрен угловой детектор для определения углового положения объекта, содержащий:
систему определения положения, содержащую:
группу шаблонов, содержащую, по меньшей мере, одну узловую часть и, по меньшей мере, одну информационную часть, причем совокупность групп шаблонов размещена на объекте, положение которого подлежит определению; по меньшей мере, одно устройство захвата изображения для определения шаблона; и вычислительное устройство, анализирующее сигналы от устройства захвата изображения;
причем анализы содержат определение геометрических центров в, по меньшей мере, двух направлениях узловых частей шаблона и определение типа части для каждой выявленной части шаблона; причем узловые части обеспечивают определение местоположения относительно устройства захвата изображения, и информационные части обеспечивают положение узловых частей относительно объекта;
причем вычислительное устройство дополнительно содержит средство для определения углового положения объекта из анализа сигнала.
Краткое описание чертежей
Изобретение будет более подробно описано ниже неограничительным образом со ссылкой на иллюстративные варианты осуществления, представленные на прилагаемых чертежах, на которых:
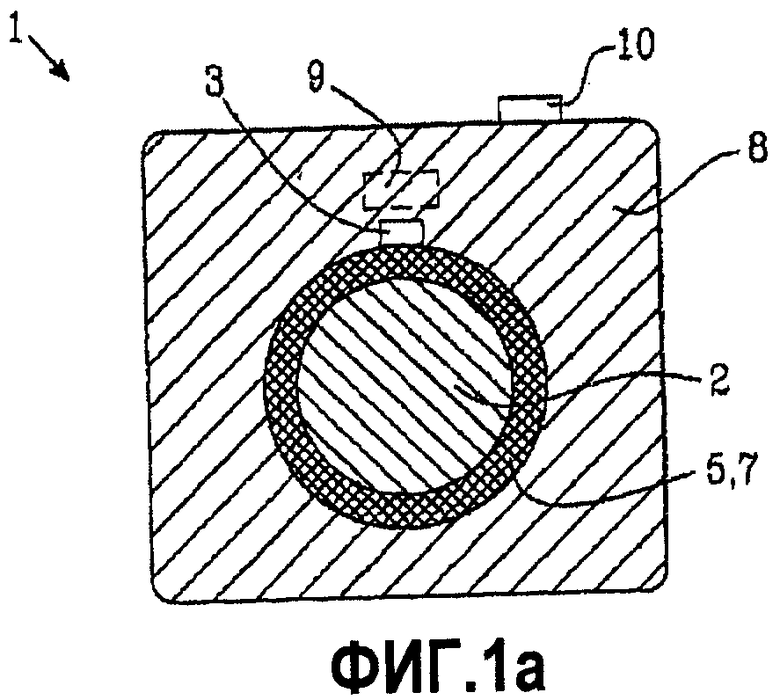
фиг.1a - вид в разрезе устройства позиционирования, применяемого согласно варианту осуществления настоящего изобретения;
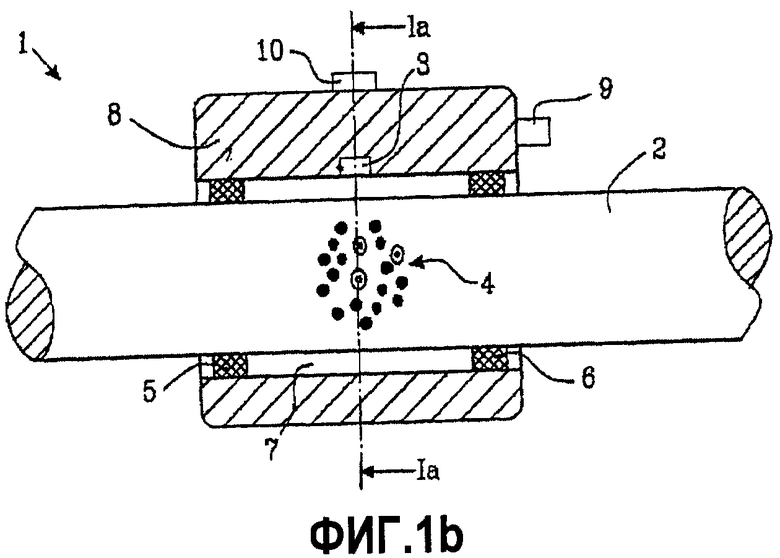
фиг.1b - вид сбоку варианта осуществления, показанного на фиг.1a;
фиг.2 - схема устройства обработки согласно настоящему изобретению;
фиг.3 - подробный вид шаблона позиционирования согласно настоящему изобретению;
фиг.4 - применение настоящего изобретения;
фиг.5 - другое применение настоящего изобретения;
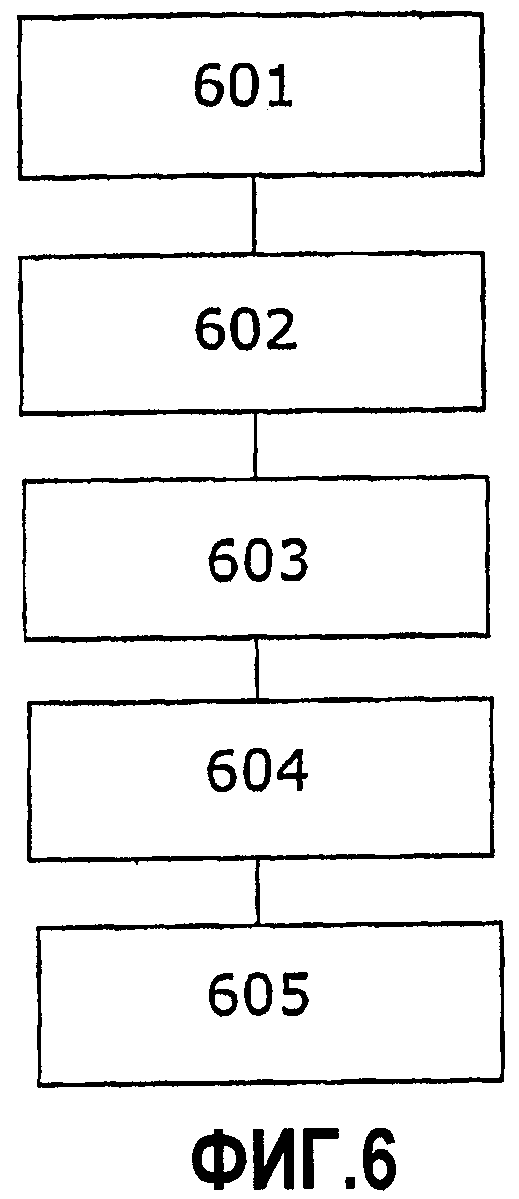
фиг.6 - блок-схема способа, отвечающего настоящему изобретению; и
фиг.7 - другой вариант осуществления настоящего изобретения.
Подробное описание предпочтительных вариантов осуществления
На фиг.1 позиция 1 обозначает измерительное устройство 1 в целом, изображенное в разрезе, согласно варианту осуществления настоящего изобретения. Устройство 1 содержит устройство 3 захвата изображения, расположенное на расстоянии от объекта 2, представляющего интерес. Устройство 1 окружено корпусом 8, электрическими разъемами 9 и, в необязательном порядке, интерфейсом 10 управления. Согласно фиг.1 объектом, представляющим интерес, является вал 2, и устройство 1, смонтированое на валу 2, поддерживаемое двумя подшипниками 5 и 6. Устройство 3 захвата изображения установлено вблизи поверхности объекта 2, и устройство 1 может иметь такую конфигурацию, чтобы образовывать полость 7, которая может быть, по существу, загерметизирована для снижения риска проникновения в полость 7 грязи или других мешающих факторов. На фиг.1a показан вид в разрезе варианта осуществления, взятый в плоскости Ia, показанной на фиг.1b, на которой показан вид сбоку варианта осуществления.
Сигналы от устройства 3 захвата изображения поступают на устройство 200 обработки, показанное на фиг.2, через разъем 207 для обработки изображения и преобразования сигнала с целью обеспечения сигнала или сигналов, указывающих положение объекта 2 некоторому внешнему устройству, подключенному к устройству обработки с использованием разъема 203. Устройство обработки может включать в себя процессор 201, запоминающее устройство (или устройства) 202, устройство 204 обработки изображения и другие устройства 205 и 206 в зависимости от сферы применения измерительного устройства 1. Устройство обработки может иметь связной интерфейс для осуществления связи с внешними устройствами или дополнительными устройствами, подключенными к устройству управления 1. Такие дополнительные устройства могут включать в себя, но без ограничения, обратную связь, устройства ограничения или аналогичные устройства взаимодействия для взаимодействия с пользователем устройства управления. Интерфейсы для связи с внешними устройствами или внутренними датчиками можно обеспечить посредством любого подходящего разъема или разъемов, известных в технике, в том числе, но без ограничения, USB (универсальной последовательной шины), Firewire, RS232, RS485, Ethernet, параллельного порта Centronics, GPIB (интерфейсной шины общего назначения), различных беспроводных интерфейсов (например, Bluetooth и WLAN) и т.д. Перечисленные интерфейсы соответствуют существующим стандартам для интерфейсов, но следует понимать, что они могут предусматривать будущие стандартные решения или даже специализированные интерфейсы.
Удобно, чтобы устройство 200 обработки само располагалось в измерительном устройстве или было обеспечено как внешнее автономное устройство в зависимости от применения.
Согласно варианту осуществления, показанному на фиг.1, устройство захвата изображения 3 используется для получения положения объекта 2, однако можно использовать другие типы датчиков, которые выполнены с возможностью получения данных позиционирования, например магнитный датчик, воспринимающий положения магнитных "точек" на объекте 2.
Выгодно использовать бесконтактный датчик, поскольку часть объекта 2 заключена в корпус 8 измерительного устройства 1; однако эти типы датчиков можно использовать даже без заключения в корпус. Поэтому имеется малое количество возмущений, которые могут влиять на результаты измерений, например грязь, свет или рассеянные магнитные поля. В одном варианте осуществления корпус 8 выполнен из электропроводящего материала, имеющего магнитно-изолирующие свойства для снижения риска влияния на магнитный датчик, измеряющий положение объекта 2. Шаблон 4 и камера 3 могут быть обеспечены в кожухе для снижения риска помех из окружающей среды, например грязи или света.
Однако изобретение не ограничивается бесконтактными измерениями положения объекта 2, также можно использовать контактные датчики, включающие в себя, но без ограничения, скользящие кольца, измерения импеданса, делители напряжения, цифровые кодеры и измерения емкости.
Перейдем к фиг.3, показан функциональный шаблон, содержащий узловые точки 301-304 и информационные точки 305-311. Точки могут иметь разные размеры и разные коэффициенты заполнения, и эти конфигурации будут иметь функциональный эффект при считывании их с помощью считывающего устройства, например, камеры. На фиг.3 также указаны виртуальные точки 312-315, они не являются маркерами, которые присутствуют в фактическом решении, но их можно, в необязательном порядке, использовать в целях анализа как опорные точки в алгоритме анализа. Для считывания точек с использованием камеры может потребоваться освещение 320, 330, 340, 350, в зависимости от применения и окружения. В данном случае четыре светоизлучающих устройства (например, светодиоды (СИД), электрическая лампа (накаливания), лазерные диоды, инфракрасные излучатели (инфракрасные излучатели могут пригодиться, например, при наличии какого-либо слоя загрязнения, который не поглощает и не отражает инфракрасный свет) или люминесцентная трубка) используются для обеспечения равномерного освещения шаблона в области считывания камеры. Шаблон повторяется с вариациями по всему объекту, который проходит перед камерой, для обеспечения возможности получения абсолютного положения объекта. Однако изобретение не ограничивается четырьмя осветительными устройствами, но можно использовать любое подходящее количество, и, в ряде случаев, когда внешнего света из окружающей среды достаточно, дополнительное освещение не требуется. Освещение может относиться к любому пригодному частотному диапазону, например, но без ограничения: видимому свету, инфракрасному свету, ультрафиолетовому свету, рентгеновскому излучению или микроволновому излучению.
Узловые точки 301-304 могут выглядеть как кольцо 301, 302 или кольцо с точкой 303, 304 внутри (они также могут представлять собой заполненный круг). Узловые точки 301-304 используются для определения положения в поле зрения камеры и типа точек для определенного применения, и определение производится в два этапа: на первом этапе выявляют узловые точки, а на втором этапе определяют положение узловых точек с более высокой точностью. Анализ производят в два этапа для снижения необходимой вычислительной мощности в каждую единицу времени. Для более точного определения можно использовать анализ симметрии, анализ центра тяжести или аналогичный способ определения центра точки, так называемый расчет центра масс. Этот расчет центра масс, с использованием, например, градиентного анализа, производится в, по меньшей мере, двух направлениях для получения информации о положении в, по меньшей мере, двух направлениях (и, возможно, также во вращательном измерении объекта). Узловые точки должны быть достаточно велики для обеспечения подходящего количества пикселей для производства анализа. Для повышения точности определения предпочтительно, чтобы узловые точки не были заполнены, но представляли собой кольца с точкой в центре или без нее. Это обеспечивает способ анализа, выбранный с градиентной особенностью как вне, так и внутри узловой точки, который повышает точность центра при анализе узлов. Точку в центре кольца можно использовать для обеспечения направленной особенности шаблона, т.е. система анализа упрощается, поскольку она будет получать опорные точки (или линии) на регулярной основе. Эти типы колец с точками можно использовать через каждые пять градусов вокруг объекта или около того. Например, на "экваториальной" линии групп шаблонов можно использовать кольца без точки и в 5 градусах "к югу" и "к северу" от "экваториальной" линии групп шаблонов можно использовать узловые точки в виде колец с точкой. Можно использовать и другие формы точек, например точки прямоугольной или эллиптической формы (их можно использовать для обеспечения другого способа получения информации о направлении или вращении; т.е. эллипс имеет собственные направленные свойства вследствие своей формы). Другие формы могут включать в себя квадратную, треугольную или неправильную формы.
Группы информационных точек 305-311 сконцентрированы вокруг одной узловой точки, между двумя узловыми точками или между четырьмя узловыми точками. Информационные точки используются для определения абсолютного положения группы шаблонов. Информационные точки, предпочтительно, имеют иной размер, чем узловые точки, чтобы отличать их от узловых точек. Они часто бывают меньшего размера, поскольку они не используются для определения положения шаблона относительно поля зрения камеры, но используются для определения абсолютной координаты идентифицированной группы относительно объекта, содержащего шаблон. Кроме того, эти информационные точки меньшего размера могут иметь разные формы: заполненные круги, кольца и несуществующие (несуществование точки также обеспечивает информацию, если система знает, определенная геометрическая область может содержать точки). Система анализа определяет группу шаблонов информационных точек и определяет их относительное положение и тип формы точки. Поскольку системе известно количество информационных точек, используемых в группе информационных шаблонов, система может определить, какой тип точек присутствует в каждом положении, и из этого анализа определить абсолютное положение этой группы информационных шаблонов. С использованием семи информационных точек, как на фиг.3, указанных трех типов можно получить очень большое количество уникальных комбинаций, которого достаточно для объектов разумных размеров и выбранной точности; однако следует понимать, что можно использовать другое количество информационных точек, в зависимости от применения. Можно использовать другие формы информационных точек и/или узловых точек, изобретение не ограничивается круглыми формами, можно использовать квадраты, треугольники или любые другие геометрические формы (даже неправильные формы). Размер узловых и/или информационных точек можно использовать для обеспечения точек с другим типом информации, и в этом случае размер можно определить из площади каждой точки. Затем размер можно использовать даже для неправильных форм, поскольку каждую точку можно определить по количеству пикселей, составляющих изображение точки. Узловые и информационные точки могут быть одними и теми же точками, т.е. они не обязаны иметь разные размер, тип или положение, пока система может использовать шаблон для определения положения точки на объекте и положения относительно воспринимающего устройства. В приложении с искривленными поверхностями шаблон наносится в угловой, а не в декартовой системе координат; т.е., например, через каждые 5 градусов по периметру объекта для сферического объекта, а не через каждые 5 мм по периметру. Таким образом, можно скомпенсировать неправильности объекта. Однако специалисту в данной области техники следует понимать, что шаблон можно наносить в декартовой системе координат с надлежащими поправками в калибровке и/или анализе полученного шаблона даже для неплоской поверхности, т.е. искривленной поверхности.
Шаблон можно наносить любым подходящим способом в зависимости от типа поверхности и объекта, например, путем лазерной маркировки, гравировки, травления, штамповки, насечки, скрайбирования, окраски, струйной печати, непосредственно на объект или на пленку или любой другой подходящий материал, который, в свою очередь, прикрепляется к объекту, и т.д., что очевидно специалисту в данной области техники. Например, рукав, полученный литьем под давлением, может быть заранее снабжен группами шаблонов при изготовлении рукава, и рукав может быть, в свою очередь, нанесен на объект, представляющий интерес.
Точки в группе шаблонов могут иметь разные глубины и профили глубины в материале, на который нанесены точки. Это может быть удобно для обеспечения разных контрастных конфигураций. Например, точку с коническим сужением по глубине камера будет видеть более темной, чем точку с плоской поверхностью дна. Кроме того, шаблон может выступать из объекта, например, в виде конусов, выступающих из материала; это может быть полезно, например, для определения расстояния между воспринимающим устройством и объектом.
Предпочтительно, чтобы шаблон имел конфигурацию, зависящую от типа поверхности, например, по существу, плоских поверхностей или искривленных поверхностей. Настоящее изобретение особенно пригодно для использования на искривленных поверхностях.
Шаблон может обеспечивать информацию о положении объекта относительно осей x и y, а также повороте или изгибании объекта относительно воспринимающего устройства. Путем измерения расстояния между двумя информационными или узловыми точками (или даже между узловой и информационной частями) или размера кодовой или узловой точки также можно определить расстояние между объектом и воспринимающим устройством, т.е. положение по оси z.
В случае когда воспринимающим устройством является устройство захвата изображения, используется алгоритм для определения типа шаблона и относительных положений и степени заполнения каждой точки. Поскольку каждая группа шаблонов уникальна, можно определить абсолютное положение шаблона (и, таким образом, объекта, на котором зафиксирован шаблон). Преимущество анализа на основе симметрии в его быстроте и не слишком большой вычислительной интенсивности, что позволяет использовать его в недорогих решениях. Значения пикселей, полученные от камеры, содержат, например, данные шкалы серого (или они могут быть закодированы цветом, если фактические узловые и/или информационные точки содержат данные цвета), например, значения в пределах от 0 до 255. Анализ содержит задание порогового значения для случая, когда система определяет, содержит ли пиксель маркер. Этот порог можно задавать (программно или аппаратно) и регулировать согласно внешнему свету или грязи на объекте, на который нанесены маркеры. Если пиксель полностью заполнен маркировочной точкой, его можно считывать, например, как 40, пиксель, не имеющий никакой маркировки, можно считывать, например, как 180, и пиксель, лишь частично заполненный маркировкой, можно считывать, например, как 90, что будет ниже порога 100 и, таким образом, определяться как содержание маркера. Эти частично заполненные пиксели можно использовать при анализе для повышения точности определения положения. Анализ предусматривает сканирование всех пикселей, полученных в кадре, и определение любых узловых и информационных точек в кадре. Он может быть выполнен с возможностью отфильтровывания точек, имеющих меньше или больше определенного количества пикселей, поскольку узловые и информационные точки имеют известный размер в пикселях; например, точки, имеющие менее 5 или больше 15 пикселей, можно отфильтровывать для применения, когда узловые точки имеют размер в кадре камеры около 10 пикселей и информационные точки имеют размер около 6 пикселей. Настоящее изобретение не ограничивается вышеописанными иллюстративными значениями шкалы серого и размерами считываний камеры. Это сильно зависит от приложения и необходимой точности системы и может варьироваться в широком диапазоне. Например, в решениях, связанных со шкалой серого, полностью черный цвет можно представить значением 0 или 255, и полностью белый цвет - значением 255 или 0, соответственно. Пиксельные размеры узловых и информационных точек можно выбрать равными любому другому подходящему значению, что понятно специалистам в данной области, в зависимости, например, от настройки камеры, применения и расстояния между камерой и шаблоном.
На фиг.4 показана схема устройства 400 измерения крутящего момента с использованием настоящего изобретения. Используя шаблоны для получения положения объекта, можно измерить деформации объекта 402. Для этого можно сравнить два разных положения объекта 402 и измерить относительное положение между ними. Расхождение между ними будет свидетельствовать о деформации; это справедливо, например, для крутящего момента, присутствующего в вале 402, где крутящий момент порождает угловой сдвиг в вале 402 между двумя разными точками в продольном направлении вала 402. Однако точность измерительного устройства зависит от расстояния между двумя измерительными точками; чем больше расстояние между двумя точками, тем больше угловое отклонение и, таким образом, выше точность. Согласно фиг. 4, используется одно воспринимающее устройство (например, устройство захвата изображения), измеряющее одновременно два отдельных шаблона, и для увеличения углового отклонения два рукава 403 и 404 используются таким образом, чтобы усиливать угловое отклонение. Для этого одна сторона 406 и 405 соответствующего рукава 403 и 404 прикрепляется к валу 402. Любое угловое отклонение в каждой из точек фиксации будет переноситься в каждый рукав 403, 404 и поэтому каждый свободный конец 408, 409 каждого рукава 403, 404 будет отклоняться с тем же угловым сдвигом, что и каждый фиксированный конец 405, 406. Шаблоны 4 и 4' на рукавах 403, 404 на каждом свободном конце 408, 409 можно измерять одним и тем же воспринимающим устройством 401. Преимущество этого типа решения в отсутствии необходимости в калибровке между совокупностью воспринимающих устройств, например, характеристик хронирования, которая может представлять затруднение, если вал 402 вращается со скоростями, близкими к скорости восприятия или превышающими ее. Например, в случае устройств захвата изображения, частота кадров устройства захвата изображения по сравнению с оборотами вала 402 будет задавать верхний предел точности. Однако для приложений с использованием воспринимающих устройств с высокими скоростями восприятия или в приложениях, где объект 402 движется со скоростью ниже скорости восприятия, можно использовать совокупность воспринимающих устройств, и в таких случаях рукава 403, 404 не нужны, но вместо них шаблон может располагаться непосредственно на вале 402. Система также может обеспечивать информацию о поступательном положении вала 402 и/или изгибе вала 402. При обеспечении камеры (не показана) в другом угловом положении (например, в 90 градусах от первой камеры 401), но в том же продольном положении на вале, система может действовать как устройство позиционирования в координатах X, Y и Z, а также обеспечения информации о кручении и изгибе. Система также может обеспечивать информацию о скорости вращения вала.
На фиг.5 показан вариант осуществления настоящего изобретения, используемый на шаре или части шарообразной структуры для использования, например, в устройстве компьютерного интерфейса, например шаровом манипуляторе, или интерфейсе роботизированной руки для отслеживания положения роботизированной руки, в 3D цифровом преобразователе для измерения и оцифровки формы трехмерного объекта. Система позиционирования, согласно этому варианту осуществления, содержит шар 501 с шаблоном 504, согласно настоящему изобретению, размещенным на шаре 501. Система 503 выявления шаблона, содержащая вычислительное устройство (не показано) и, например, камеру 502, выявляющую положение шаблона относительно системы выявления и способную выводить через интерфейс (не показан) изображения или абсолютные координаты шара 501, в зависимости от того, имеет ли система вычислительное устройство. Поскольку шар и шаблон могут быть выполнены из упругого материала, их можно использовать как нагружаемый элемент. Это будет более подробно рассмотрено ниже в этом документе.
На фиг.6 показана блок-схема способа (этапов 601-605) для калибровки измерительного устройства согласно настоящему изобретению. При нанесении шаблона на объект, положение которого нужно знать, шаблон можно калибровать; это можно делать на обрабатывающем механизме, где шаблон наносится на объект путем вращения (если объект, по меньшей мере, частично имеет сферическую или цилиндрическую геометрию). Обрабатывающий механизм можно снабдить устройством определения исходного положения, например угловым кодером, для определения углового положения объекта при вращении станка. Объект может вращаться при нанесении шаблона, тем самым гарантируя, что шаблон наносится в угловом режиме (т.е. не в декартовой системе координат, что объяснено выше). На том же механизме или, по меньшей мере, совместно с механизмом система калибровки может располагаться, считывая значения точек при вращении объекта и получении данных углового измерения от устройства определения исходного положения. Затем можно получить опорные значения положений узловых точек и, соответственно, можно создать калибровочную базу данных, которую можно использовать в устройствах с использованием настоящего изобретения для дополнительного повышения точности измерения абсолютного положения объекта в приложении. Аналогичный метод калибровки можно применять к системе на месте для перекалибровки или когда система применяется к существующему приложению, например рукав или пленка с группой шаблонов, присоединенная к валу, уже установленному в его правильном применении, такого рода обстоятельства могут представлять интерес для калибровки системы на месте.
Способ калибровки может содержать следующие этапы:
- монтаж объекта на калибровочном механизме (601);
- получение шаблона изображения шаблона на объекте (602);
- получение данных абсолютного положения от отдельного детектора положения (603);
- связывание полученных изображений шаблонов с абсолютным положением объекта (604); и
- обеспечение калибровочной базы данных для калиброванного объекта (605). Калибровочная база данных может содержать простой список данных из калибровочных данных, т.е. пар опорных положений и точек калибровки в полученных изображениях шаблонов, или алгоритм, связывающий точки шаблона с абсолютными положениями.
Регулировку порогов и условий освещения можно использовать путем считывания фоновых областей (т.е. областей без каких-либо пикселей) для получения текущего состояния освещения. Затем можно установить новое пороговое значение между маркированными и немаркированными пикселями, а также можно отрегулировать интенсивность, создаваемую осветительными устройствами 320, 330, 340, 350, управляя выходом света из этих осветительных устройств. Один способ определения условий фонового освещения состоит в следующем. Окно кадра камеры можно разделить на 16 секторов, и с помощью вышеописанного шаблона можно найти четыре сектора, где точки отсутствуют (или, по меньшей мере, присутствуют лишь частично), эти четыре сектора можно найти, отыскав четыре виртуальные точки 312-315, расположенные между каждой узловой точкой на линии между узловыми точками (линии, не содержащей информационные точки). Секторы, где находятся эти четыре виртуальные точки, можно использовать в качестве фоновых секторов для определения условий фонового освещения. Ряд таких измерений можно использовать в алгоритме накопления и усреднения для повышения точности определения этого фонового освещения. Количество секторов и фоновых секторов не ограничивается вышеупомянутым, и можно использовать другое количество таких секторов.
На фиг.7 показан вариант осуществления настоящего изобретения, относящийся к устройству 710 измерения крутящего момента, где две линии 4, 4' групп шаблонов расположены на вале 702. Две камеры 703, 705, каждая из которых считывает одну такую линию 4, 4', передают информацию изображения или данные положения на центральное устройство обработки 730 через кабели 701, 702 и интерфейсные устройства 704, 706. Поскольку две линии групп шаблонов разделены в продольном направлении вала, когда крутящий момент прилагается к валу, они слегка смещаются относительно друг друга вследствие угла закручивания вала, который возникает под действием крутящего момента. Это смещение пропорционально приложенному крутящему моменту, что позволяет измерять крутящий момент путем измерения угла закручивания вала. Две линии групп шаблонов должны отстоять друг от друга на достаточное расстояние d, для обеспечения измеримого угла закручивания. Разделение, необходимое для получения достаточного измеримого угла закручивания, зависит от разрешения камер, диапазона прилагаемого крутящего момента и желаемой точности измерения, внешнего диаметра вала и внутреннего диаметра, если вал является трубой.
В другом варианте вышеописанного устройства измерения крутящего момента 710 две камеры заменены одной камерой, измеряющей одновременно оба шаблона за счет передачи изображений на камеру из двух мест. Это можно делать, передавая изображения с использованием оптических волокон, с использованием зеркал или призмы.
Камера может представлять собой инфракрасную камеру, выявляющую разные температуры на объекте, и шаблон на объекте может быть обеспечен с разными температурными характеристиками. В этом типе решения можно обеспечить освещение в инфракрасном диапазоне для обеспечения надлежащей контрастности и других параметров освещения.
Настоящее изобретение, предусматривающее определение абсолютных положений на объектах, можно использовать в ряде вариантов применения, поскольку камера и вычислительные системы могут содержать недорогие устройства. Областями применения могут служить, например, измеритель крутящего момента, измеряющий крутящий момент бесконтактным способом, для использования в автомобилях, измеряющий крутящий момент на карданном вале (для оптимизации процессов сгорания или мощности, подаваемой на каждое колесо) или на вале рулевого колеса (для использования в усилителе руля), в велосипеде (например, велосипедном тренажере, используемом для упражнений), для любого типа вала, где нужно измерять крутящий момент. Изобретение также можно использовать для измерения другого параметра, связанного с положением объекта, представляющего интерес, такие параметры включают в себя, но без ограничения: силу, скорость вращения, положение и изгиб. Настоящее изобретение также можно использовать, например, применительно к датчику для ABS (системы автоматического торможения), для датчиков пробуксовки или в станках с ЧПУ (числовым программным управлением), применяемых в производстве для позиционирования инструментов, используемых в станке с ЧПУ.
Решение измерения групп шаблонов на объекте с помощью одной камеры с только вращательным перемещением обеспечивает точное и недорогое решение для определения углового положения объекта, например, в качестве углового кодера, но с большим увеличением разрешения. Например, когда объект является колесообразным объектом, например диском, достаточно толстым для обеспечения места для шаблона, шаблон можно обеспечить на внешней кромке колеса или на боковой поверхности колеса.
Настоящее изобретение можно использовать в шарнирно-сочлененной руке (для определения и оцифровки геометрических пропорций объекта) путем объединения нескольких разных вариантов осуществления настоящего изобретения. Шарнирно-сочлененная рука часто содержит несколько соединений, каждое из которых снабжено датчиком положения для определения положения каждой составной части руки. Благодаря ряду таких угловых соединений, шарнирно-сочлененную руку можно использовать для определения геометрических размеров объекта и для подачи их на систему автоматизированного проектирования (CAD) для передачи геометрических размеров в вычислительную систему. Шарнирно-сочлененная рука, согласно настоящему изобретению, может содержать соединения с комбинацией 3D (трехмерных) и 1D (одномерных) воспринимающих устройств, например, первым 1D датчиком, расположенным в основании руки, вторым 1D датчиком в каждом 1D соединении между секциями руки, и 3D воспринимающим устройством, удерживающим зонд, используемый для определения положения испытательного объекта при внимательном обследовании шарнирно-сочлененной руки. Количество и тип воспринимающих устройств, входящих в состав шарнирно-сочлененной руки, могут варьироваться в наших конфигурациях, выполняя одни и те же функции. Первое 1D воспринимающее устройство отслеживает общее вращательное положение руки относительно поверхности, на которой установлена шарнирно-сочлененная рука, второе и последующие 1D воспринимающие устройства в каждом соединении между секциями руки отслеживают вращательное положение, и 3D воспринимающее устройство отслеживает положение зонда относительно руки. На основании измерений ото всех воспринимающих устройств можно определить положение зонда относительно испытательного объекта и геометрическую конфигурацию цифруемого испытательного объекта.
Настоящее изобретение также можно использовать в теодолите, который представляет собой прибор для измерения горизонтальных и вертикальных углов, например, для использования в триангуляции. Теодолит содержит телескоп, установленный таким образом, что он может поворачиваться относительно двух перпендикулярных осей: горизонтальной оси и вертикальной оси. Теодолит часто устанавливается на треноге, которая располагается точно по вертикали над измеряемой точкой, и его вертикальная ось выравнивается с направлением локального гравитационного поля. Настоящее изобретение можно использовать для получения данных абсолютного положения для теодолита относительно окружения, например, поверхности земли, над которой сцентрирован теодолит. Воспринимающая система может быть обеспечена как промежуточное соединение между опорной плитой треноги и телескопом. Однако специалисту в данной области техники следует понимать, что можно предусмотреть другие части и кожухи для построения такого устройства, например ручки механической регулировки для механической калибровки устройства в надлежащее положение относительно направления гравитационного поля и/или параллельно поверхности земли, дисплеи считывания, позволяющие пользователю считывать данные положения, связной интерфейс для передачи таких данных на внешнее устройство (например, портативный компьютер), источник питания (например, внешнее питание или внутренняя батарея). Общий состав и принцип работы теодолитов, в целом, известны специалистам в данной области техники и не будут описаны в этом документе.
Одно преимущество настоящего изобретения состоит в том, что шаблон можно обеспечить на нагружаемых элементах в конструкциях различного назначения, где применимо изобретение. Например, в случае датчика крутящего момента, шаблон обеспечивают на вале, который, в свою очередь, является частью общей конструкции, в которой находится вал, в шарнирно-сочлененной руке шаблон обеспечивают на элементах, принимающих нагрузку, образующих соединения, в подшипниках шаблон можно обеспечить на нагружаемых элементах подшипника, например шариках или роликах, входящих в состав шариковых или роликовых подшипников. Это преимущество обусловлено тем, что шаблон можно обеспечить либо как часть самого материала объекта (например, в виде ямок или выемок) или на материале, устойчивом к механическому износу, присоединенном к объекту.
В целом это изобретение также имеет преимущество, состоящее в возможности обеспечения быстрых и точных измерений данных абсолютного положения, однако верхний предел скорости ограничен скоростью считывания шаблона, например, в случае системы захвата изображения, обеспечивающей изображения шаблона, частота кадров этого захвата изображения задает верхний предел скорости. Настоящее изобретение обеспечивает точность, в 10 раз превышающую обычную точность аналогичных приложений с более дорогостоящими и сложными решениями во многих приложениях.
Следует понимать, что слово "содержащий" не исключает наличия других элементов или этапов помимо перечисленных, и что упоминание элемента в единственном числе не исключает наличия совокупности таких элементов. Также следует понимать, что никакие условные обозначения не ограничивают объем формулы изобретения, что изобретение можно реализовать, по меньшей мере, частично аппаратными и программными средствами, и что несколько "средств", "блоков" или "устройств" может быть представлено одним и тем же элементом оборудования.
Вышеупомянутые и описанные варианты осуществления носят иллюстративный характер и не призваны ограничивать настоящее изобретение. Специалисты в данной области техники могут предложить другие решения, варианты использования, задачи и функции, отвечающие заявленному объему изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОНТРОЛЬ ПРЕДВАРИТЕЛЬНОГО НАТЯЖЕНИЯ | 2008 |
|
RU2467284C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДОКУМЕНТОВ | 2007 |
|
RU2477522C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДОКУМЕНТОВ | 2012 |
|
RU2628119C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОБЕСПЕЧЕНИЯ ЗАЩИТЫ ДОКУМЕНТОВ | 2008 |
|
RU2452014C2 |
| УСОВЕРШЕНСТВОВАННЫЙ СПОСОБ И АППАРАТ ДЛЯ ОПРЕДЕЛЕНИЯ БАЛЛЬНОЙ ОЦЕНКИ УПИТАННОСТИ, ЖИВОГО ВЕСА И ИНДЕКСА ФЕРТИЛЬНОСТИ | 2016 |
|
RU2714709C2 |
| СПОСОБ ИДЕНТИФИКАЦИИ ПЕЧАТНОЙ ФОРМЫ ДОКУМЕНТА И УСТРОЙСТВО ДЛЯ ЭТОЙ ЦЕЛИ | 2009 |
|
RU2511616C2 |
| УСТРОЙСТВО ДЛЯ КАЛИБРОВКИ ШЛЕМА | 2016 |
|
RU2705644C1 |
| Программно-аппаратный комплекс, предназначенный для обработки аэрокосмических изображений местности с целью обнаружения, локализации и классификации до типа авиационной и сухопутной техники | 2021 |
|
RU2811357C2 |
| СПОСОБ КАЛИБРОВКИ ОПТИЧЕСКОЙ СИСТЕМЫ | 2008 |
|
RU2381474C2 |
| СТЕРЕОСКОПИЧЕСКАЯ ИЗМЕРИТЕЛЬНАЯ СИСТЕМА И СПОСОБ | 2009 |
|
RU2452992C1 |




Изобретение относится к устройству, системе и способу выявления абсолютного положения объекта с использованием шаблона, содержащего два типа данных положения: положение шаблона относительно объекта и положение шаблона относительно воспринимающего устройства, например, камеры. Устройство содержит воспринимающее устройство, захватывающее изображения шаблона, находящегося на объекте, и вычислительное устройство, анализирующее изображения для определения абсолютного положения объекта относительно воспринимающего устройства. В изобретении раскрыты также система и способ выявления абсолютного положения объекта, а также датчик крутящего момента, использующие упомянутое устройство. Изобретение позволяет значительно повысить точность определения положения объекта при одновременном упрощении и удешевлении реализации во многих практических приложениях. 4 н. и 15 з.п. ф-лы, 7 ил.
1. Система (1) выявления положения для выявления положения объекта, содержащая:
группу (4) шаблонов, содержащую, по меньшей мере, одну узловую часть (301-304) и, по меньшей мере, одну информационную часть (305-311) и совокупность групп шаблонов, размещенных прямо или косвенно на объекте (2);
по меньшей мере, одно устройство (3) захвата изображения для выявления шаблона (4); и
вычислительное устройство (200), содержащее средство анализа сигналов для выявления геометрических центров в, по меньшей мере, двух направлениях всех узловых частей (301-304) шаблона и определения типа части для каждой выявленной части (301-311) шаблона; причем узловые части (301-304) выполнены с возможностью обеспечения положения относительно устройства (3) захвата изображения, и информационные части (305-311) обеспечивают определение местоположения узловых частей относительно объекта.
2. Система выявления положения по п.1, в которой объект (2) является трехмерным объектом (2).
3. Система выявления положения по п.1, в которой группа (4) шаблонов обеспечена на искривленной поверхности объекта (2).
4. Система выявления положения по п.1, в которой две линии групп (4, 4') шаблонов расположены, по существу, параллельно друг другу на расстоянии (d) друг от друга в продольном направлении вала (2).
5. Система выявления положения по п.4, в которой обеспечено два устройства (3) захвата изображения, каждое из которых считывает одну из двух линий групп (4, 4') шаблонов.
6. Система выявления положения по п.1, дополнительно содержащая, по меньшей мере, одно осветительное устройство (320, 330, 340, 350), и причем освещение является одним из видимого света, инфракрасного света, рентгеновского света и ультрафиолетового света.
7. Система выявления положения по п.6, в которой интенсивностью освещения от осветительного устройства управляет вычислительное устройство.
8. Система выявления положения по п.1, в которой узловые части и информационные части содержат, по меньшей мере, одно из следующего: заполненный круг, кольцо или кольца с центральной меткой.
9. Система выявления положения по п.1, в которой, по меньшей мере, одна из узловых частей и информационных частей закодированы цветом.
10. Система выявления положения по п.1, в которой группа (4) шаблонов и устройство (3) захвата изображения расположены в кожухе, обеспечивающем защиту от параметров окружающей среды.
11. Система выявления положения по п.1, в которой вычислительное устройство дополнительно выполнено с возможностью определения положения центров симметрии узловых точек с использованием алгоритма на основе видения, использующего градиентный анализ.
12. Система выявления положения по п.1, в которой центр симметрии определяется как для узловых, так и для информационных частей шаблона.
13. Система выявления положения по п.1, в которой узловые части содержат совокупность разных типов, например заполненную точку, незаполненную точку или незаполненную точку с центральным пятном.
14. Система выявления положения по п.13, в которой точка имеет форму, выбранную из следующих форм: круг, прямоугольник, квадрат или треугольник.
15. Система выявления положения по п.1, в которой информационные части содержат совокупность разных типов, например заполненную точку, незаполненную точку или незаполненную точку с центральным пятном.
16. Система выявления положения по п.1, в которой вычислительное устройство выполнено с возможностью определения расстояния между объектом и устройством захвата изображения путем измерения, по меньшей мере, одного из: размера узловой части, размера информационной части, расстояния между двумя узловыми частями, расстояния между двумя информационными частями и расстояния между узловой и информационной частями.
17. Датчик крутящего момента для измерения крутящего момента в объекте (2), содержащий:
систему (1) выявления положения, содержащую:
группу (4, 4') шаблонов, содержащую, по меньшей мере, одну узловую часть (301-304) и, по меньшей мере, одну информационную часть (305-311), причем совокупность групп шаблонов размещена прямо или косвенно на объекте (2),
по меньшей мере, одно устройство (3) захвата изображения для выявления шаблона (4), и
вычислительное устройство (200), содержащее средство анализа сигналов от устройства (3) захвата изображения для выявления геометрических центров в, по меньшей мере, двух направлениях узловых частей (301-304) шаблона и выявления типа части для каждой выявленной части (301-311) шаблона; причем узловые части (301-304) выполнены с возможностью обеспечения положения относительно устройства (3) захвата изображения, и информационные части (305-311) обеспечивают определение местоположения узловых частей относительно объекта,
по меньшей мере, два рукава (403, 404), каждый из которых имеет совокупность групп (4, 4') шаблонов, причем рукава смонтированы на объекте (2), и
в котором система выявления положения получает данные положения от каждого рукава (403, 404), и вычислительное устройство дополнительно содержит средство для выявления углового сдвига между положением рукавов и для определения крутящего момента из углового сдвига.
18. Способ определения положения объекта, содержащий этапы, на которых:
выявляют, с помощью воспринимающего устройства, группу шаблонов, находящуюся на упомянутом объекте,
определяют, с использованием анализа симметрии, в, по меньшей мере, двух направлениях центральные положения узловых точек, образующих часть группы шаблонов,
определяют тип узловой точки,
определяют тип и положение информационных точек, находящихся на объекте, и
определяют абсолютное положение объекта относительно воспринимающего устройства с использованием объединенной информации положения и типа точек как и для узловых, так и для информационных точек.
19. Угловой детектор для выявления углового положения объекта (2), содержащий:
систему (1) выявления положения, содержащую:
группу (4) шаблонов, содержащую, по меньшей мере, одну узловую часть (301-304) и, по меньшей мере, одну информационную часть (305-311), и совокупность групп шаблонов, размещенных прямо или косвенно на объекте (2),
по меньшей мере, одно устройство (3) захвата изображения для определения шаблона (4), и
вычислительное устройство (200), содержащее средство анализа сигналов от устройства (3) захвата изображения для определения геометрических центров в, по меньшей мере, двух направлениях узловых частей (301-304) шаблона и определения типа части для каждой выявленной части (301-311) шаблона, причем узловые части (301-304) выполнены с возможностью обеспечения положения относительно воспринимающего устройства, и информационные части (305-311) обеспечивают определение местоположения узловых частей относительно объекта,
причем вычислительное устройство дополнительно содержит средство для определения углового положения объекта из анализа сигнала.
| US 5965879 А, 12.10.1999 | |||
| US 6360948 B1, 26.03.2002 | |||
| US 6172665 В1, 09.01.2001 | |||
| Устройство для транспортирования | 1978 |
|
SU729112A2 |
| US 5214426 А, 25.05.1993 | |||
| US 5319577 A, 07.06.1994 | |||
| СПОСОБ ПИТАНИЯ ЭЛЕКТРИЧЕСКИХ ПОТРЕБИТЕЛЕЙпостоянного ТОКА от | 0 |
|
SU165225A1 |
| Устройство для определения абсолютного положения вала исполнительного механизма | 1988 |
|
SU1781822A1 |

