Изобретение относится к области охранной сигнализации.
Известен способ обнаружения нарушителя по его тепловому излучению, в котором принятое тепловое излучение преобразуют в электрический сигнал, который по форме сравнивают с эталонным сигналом. Сравнение осуществляют путем вычисления коэффициента корреляции и сравнения его с заданным уровнем (см., например, патент США №4377808, МПК G08B 13/18, опубл. 22.03.1983 г.).
Недостатком известного технического решения является низкая помехоустойчивость, обусловленная перемещением через рубеж контрастных по температуре слоев воздуха, наблюдаемых на открытой местности при порывистом ветре, так как в этом случае регистрируемый сигнал практически не отличается от сигнала, принимаемого при перемещении через рубеж человека.
Ближайшим известным техническим решением является способ обнаружения нарушителя, основанный на использовании 4-х тепловых датчиков (объективов) и позволяющий повысить помехозащищенность по отношению к перемещению через рубеж контрастных по температуре слоев воздуха, имеющих размеры, превышающие размер реального объекта, за счет выявления и контроля поперечного по отношению к сторонам контролируемого рубежа размера пересекающего рубеж объекта (см. патент РФ №2058593 от 27.10.1989 г., МПК G08B 13/18)
Недостатком известного способа является необходимость использования 4-х тепловых датчиков, связанное с этим удорожание реализации способа обнаружения нарушителя на стадиях изготовления, юстировки и эксплуатации системы.
Техническая задача изобретения - удешевление реализации способа обнаружения нарушителя путем использования не 4-х, как в прототипе, а 2-х тепловых датчиков при сохранении помехозащищенности за счет контроля размеров объекта-нарушителя.
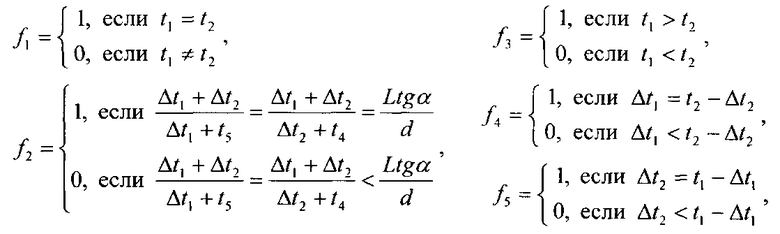
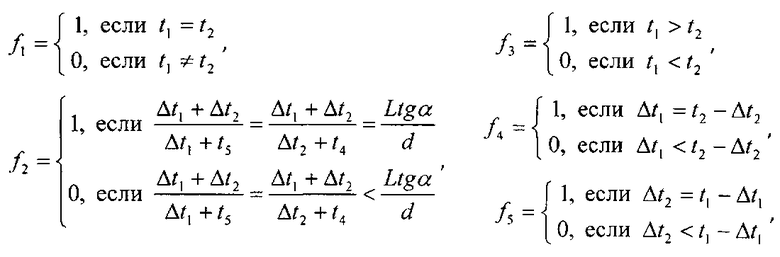
Реализуется поставленная задача тем, что в способе обнаружения нарушителя и определения параметров нарушителя по его тепловому излучению, путем использования тепловых датчиков, расположенных на противоположных сторонах рубежа, преобразования принятого излучения в электрические сигналы, определения временных задержек сигналов друг относительно друга, используют два тепловых датчика с углами полей зрения α, расположенных по одному на каждой стороне рубежа протяженностью L, образующие полей зрения которых в горизонтальной плоскости параллельны и одна из них у каждого объектива перпендикулярна противоположной стороне рубежа, а расстояние между ними равно d, по преобразованным принятыми этими датчиками излучениям в электрические сигналы определяют временные отрезки: t1 - время от начала вхождения объекта в поле зрения первого объектива до его полного выхода, t2 - время от начала вхождения объекта в поле зрения второго объектива до его полного выхода, t4 - время от начала вхождения объекта в поле зрения первого объектива до начала вхождения объекта в поле зрения второго объектива, t5 - время между максимумами сигналов, возникающих на приемниках излучения обоих объективов, Δt1 - время от начала вхождения объекта в поле зрения первого объектива до достижения сигналом максимума, Δt2 - время от начала вхождения объекта в поле зрения второго объектива до достижения сигналом максимума, с помощью полученных временных отрезков t1, t2, t4, t5, Δt1, Δt2 формируют дискриминантный набор логических функций:
для выявления класса пересечения рубежа вычисляют четыре логических выражения: 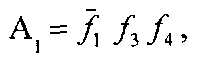
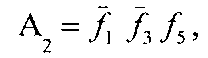

 только одно из которых является истинным и определяет вариант пересечения рубежа, бесконечное множество Ω которых, отличающееся размерами объекта по отношению к полям зрения тепловых датчиков, разделено на четыре несовместных класса, составляющих полную группу событий и удовлетворяющих условию
только одно из которых является истинным и определяет вариант пересечения рубежа, бесконечное множество Ω которых, отличающееся размерами объекта по отношению к полям зрения тепловых датчиков, разделено на четыре несовместных класса, составляющих полную группу событий и удовлетворяющих условию  где
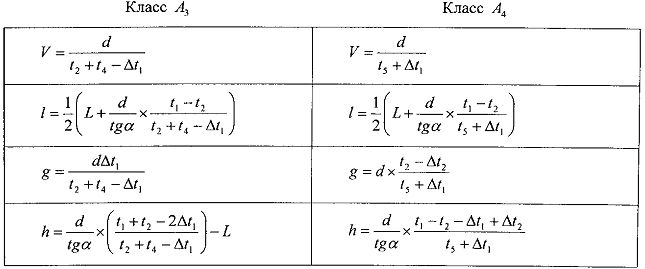
где  и в соответствии с выявленным классом определяют параметры нарушителя:
и в соответствии с выявленным классом определяют параметры нарушителя:

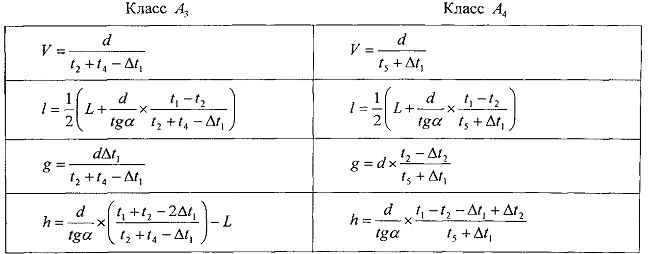
где V - скорость перемещения объекта вдоль границ рубежа, h - поперечный размер объекта, g - продольный размер объекта, l - расстояние от первого объектива до траектории движения объекта.
При этом возникает задача разделения бесконечного множества (генеральной совокупности) Ω на минимально возможное число несовместных классов, составляющих полную группу множеств, удовлетворяющих условию  где
где 
 Каждому классу Ai должны быть поставлены в соответствие свои уникальные, присущие только ему, признаки и уравнения, по которым определяются параметры объекта.
Каждому классу Ai должны быть поставлены в соответствие свои уникальные, присущие только ему, признаки и уравнения, по которым определяются параметры объекта.
В этих условиях возникает задача поиска дискриминантных функций в области временных откликов датчиков, позволяющих отнести наблюдаемое пересечение рубежа к определенному классу Ai.
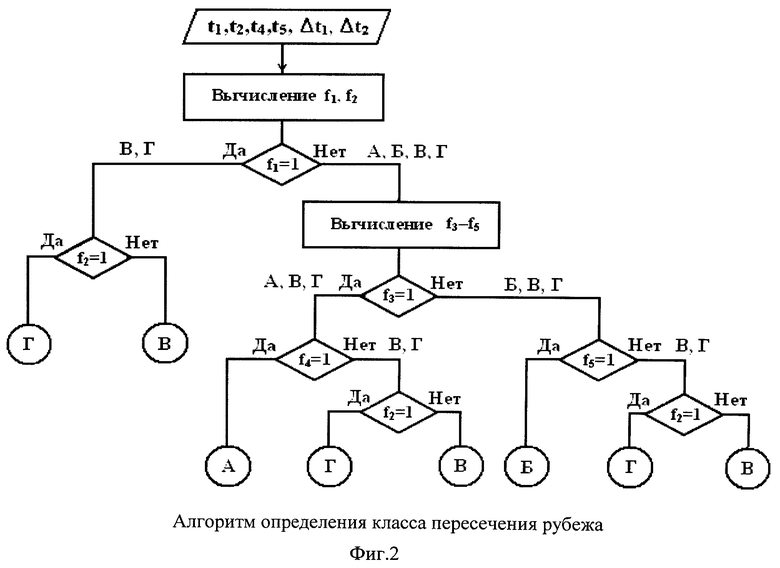
Изобретение поясняется чертежами, где на фиг. 1 представлены классы разделения вариантов пересечения рубежа, на фиг. 2 - алгоритм определения класса пересечения рубежа.
В описываемом способе обнаружения оптико-электронная система содержит всего два одинаковых объектива с одноэлементными приемниками 1 и, как показано чертеже (фиг. 1), α - угол поля зрения объектива. На каждой из сторон рубежа протяженностью L размещено по одному объективу. Две образующие полей зрения объективов, проходящие через их оси в горизонтальной плоскости перпендикулярны сторонам рубежа, параллельны между собой и расстояние между ними равно d. Две другие образующие также параллельны, что видно из фиг. 1. Тело, имеющее поперечный размер h и продольный размер g, движется через рубеж со скоростью V и пересекает его на расстоянии l, например, от приемника 1. Множество вариантов пересечения рубежа, составляющих бесконечное множество (генеральную совокупность) Ω, разбито на четыре подгруппы (класса), обозначенных на фиг. 1 классами А1, А2, А3, А4. Классы А1, А2, А3, А4 составляют полную группу множеств, т.е.  взаимно не пересекаются. Классы А1 и А2 (фиг. 1) отличаются друг от друга только расстоянием l от одной из сторон рубежа, имея при этом размеры, целиком вписывающиеся в одно из полей зрения и не вписывающиеся в другое. Класс А3 иллюстрирует объект, имеющий минимальные размеры объекта-нарушителя, а класс А4 - максимальные, когда его размер g при любом расстоянии l превышает размер поля зрения объектива.
взаимно не пересекаются. Классы А1 и А2 (фиг. 1) отличаются друг от друга только расстоянием l от одной из сторон рубежа, имея при этом размеры, целиком вписывающиеся в одно из полей зрения и не вписывающиеся в другое. Класс А3 иллюстрирует объект, имеющий минимальные размеры объекта-нарушителя, а класс А4 - максимальные, когда его размер g при любом расстоянии l превышает размер поля зрения объектива.
Внутри каждого класса соблюдается идентичность соотношений, связывающих параметры объекта V, l, h, g с временными откликами датчиков t1, t2, t4, t5, Δt1, Δt2 и известными характеристиками рубежа α, L, d.
Обнаружение объекта базируется, как и в прототипе, на анализе откликов тепловых датчиков, которых в предлагаемом способе не четыре, а два. Однозначность отнесения конкретного пересечения рубежа к одному из классов А1, А2, А3, А4 обеспечивается логическим анализом на основе выявленных и представленных ниже дискриминантных функций, формируемых на базе временных откликов t1, t2, t4, t5, Δt1, Δt2 двух тепловых приемников.
Временные диаграммы, изображенные в нижней части фиг. 1 для каждого из классов пересечения рубежа, показывают вид сигналов на тепловых приемниках и построены с учетом особенностей их работы. По оси времени моменты максимумов сигнала совпадают с моментами полного входа объекта в поле зрения или полного перекрытия объектом поля зрения объектива, а моменты минимума сигнала - с моментами полного выхода объекта из поля зрения объектива.
На фиг. 1 обозначены следующие временные отрезки:
t1 - время от начала вхождения объекта в поле зрения объектива 1 до его полного выхода;
t2 - время от начала вхождения объекта в поле зрения объектива 2 до его полного выхода;
t3 - время от момента полного выхода объекта из поля зрения объектива 1 до момента начала вхождения в поле зрения объектива 2;
t4 - время от начала вхождения объекта в поле зрения объектива 1 до начала вхождения объекта в поле зрения объектива 2;
t5 - время между максимумами сигналов, возникающих на приемниках излучения обоих объективов;
Δt1 - время от начала вхождения объекта в поле зрения объектива 1 до достижения сигналом максимума;
Δt2 - время от начала вхождения объекта в поле зрения объектива 2 до достижения сигналом максимума.
Временные диаграммы на фиг. 1 построены с учетом особенностей работы пироэлектрических приемников излучения, реагирующих на изменение температуры чувствительного элемента. Продолжительность амплитудного нарастания отклика будет совпадать по времени с процессами входа объекта в поле зрения и выхода из него, а по знаку будет определяться увеличением или уменьшением температуры чувствительного элемента (увеличением или уменьшением принимаемого лучистого потока). Продолжительность амплитудного спада определяется временем достижения температурного равновесия кристалла приемника и его чувствительного слоя.
Для всех классов пересечения рубежа справедливы три уравнения, полученные на основании анализа, проведенного по фиг. 1:



Для нахождения четырех неизвестных V, l, h, g в полученной системе не хватает еще одного уравнения. Следует заметить, что некоторые, обозначенные на рисунке 1 временные отрезки взаимозависимы, а именно t4=t1+t3. Временной отрезок t3 неудобен в использовании, поскольку начало вхождения в поле зрения объектива 2 (фиг. 1) может происходить раньше момента полного выхода объекта из поля зрения объектива 1, и в дальнейшем не используется.
Для каждого из классов А1, А2, А3, А4 можно составить еще по несколько уравнений, связывающих искомые параметры объекта-нарушителя V, l, h, g, параметры рубежа d, L, α и временные отрезки t1, t2, t4, t5, Δt1, Δt2, получаемые при обработке откликов, возникающих в тепловых датчиках. Однако среди этих уравнений нет ни одного общего для всех классов пересечения рубежа.
Определение реально произошедшего класса пересечения должно проводиться на базе анализа величин временных отрезков t1, t2, t4, t5, Δt1, Δt2, которыми располагает анализирующее устройство. В результате анализа необходимо найти дискриминантные функции, позволяющие разделить классы А1, А2, А3, А4.
Рассмотрим случай, когда t1>t2 (l>L/2). При этом возможны три класса пересечения рубежа - A1, А3, А4. При наличии класса А1 справедливо  что в условиях фиксации временных отрезков эквивалентно равенству
что в условиях фиксации временных отрезков эквивалентно равенству

Для класса А3 характерно соотношение Δt1<t2-Δt2, поскольку  а, следовательно,
а, следовательно,  Аналогично для класса А4 справедливо неравенство Δt1<t2-Δt2, поскольку
Аналогично для класса А4 справедливо неравенство Δt1<t2-Δt2, поскольку  а следовательно
а следовательно  Таким образом, равенство (4) отделяет класс А1 от классов А3 и А4.
Таким образом, равенство (4) отделяет класс А1 от классов А3 и А4.
В случае, когда t1<t2 (l<L/2), возможны классы А2, А3, А4. При наличии класса А2 справедливо  что в условиях фиксации временных отрезков эквивалентно равенству
что в условиях фиксации временных отрезков эквивалентно равенству

Для класса А3 в этом случае характерно соотношение Δt2<t1-Δt1, поскольку  а следовательно,
а следовательно,  Аналогично для класса А4 в этом случае Δt2<t1-Δt1, поскольку
Аналогично для класса А4 в этом случае Δt2<t1-Δt1, поскольку  а поэтому
а поэтому  Таким образом, равенство (5) отделяет класс A2 от классов A3 и А4.
Таким образом, равенство (5) отделяет класс A2 от классов A3 и А4.
Рассмотрим теперь разность уравнений (1) и (2):

Очевидно, что при прохождении рубежа объектом посередине его границ (l=L/2) имеет место равенство временных отрезков: t1=t2. Это условие исключает классы А1 и А2 пересечения рубежа, т.к. для них характерно обратное: t1≠t2. Условие t1=t2 идентифицирует классы А3 и А4, между которые необходимо делать выбор. Заметим, что класс А3 - это пересечение рубежа объектом сравнительно небольшой протяженности, когда его размер g отвечает условиям  и
и 
Проанализируем признаки, разделяющие классы А3 и А4.
Для класса A4 при любом соотношении между t1 и t2 характерно условие

В то же время для класса А3 справедливы два выражения


т.е. числитель и знаменатель отношений  меньше, чем для класса А4.
меньше, чем для класса А4.
Рассмотрим подробнее отношения  для класса А3, чтобы определить, каким образом они отличаются от зависимости (6).
для класса А3, чтобы определить, каким образом они отличаются от зависимости (6).
Пусть l>L/2. При этом зададим продольный размер объекта в виде  где x - некоторый линейный размер, характеризующий на сколько объект меньше соответствующего размера поля зрения объектива (что характерно для класса А3), т.е.
где x - некоторый линейный размер, характеризующий на сколько объект меньше соответствующего размера поля зрения объектива (что характерно для класса А3), т.е.  Тогда
Тогда 

Введем и рассмотрим дискриминантную функцию y1 в виде разности 

Анализ дискриминантной функции y1(x) позволяет определить поведение отношения  для класса A3. При этом практический интерес представляет область значений аргумента функции от x=0 до соизмеримых с размерами сечения поля зрения объектива.
для класса A3. При этом практический интерес представляет область значений аргумента функции от x=0 до соизмеримых с размерами сечения поля зрения объектива.
Выражение (7) показывает, что y1(x) - дробно-рациональная функция вида  Ее график - равносторонняя гипербола с асимптотами, параллельными осям координат, и с центром в точке
Ее график - равносторонняя гипербола с асимптотами, параллельными осям координат, и с центром в точке  она имеет разрыв при
она имеет разрыв при  и не имеет экстремумов. Функция y(x) является убывающей, если D<0, где
и не имеет экстремумов. Функция y(x) является убывающей, если D<0, где  - дискриминант функции, для y1(x) равный
- дискриминант функции, для y1(x) равный  При соблюдении условия
При соблюдении условия  дискриминант функции y1(x) отрицателен, а функция убывает. При x=0 и при соблюдении условия l>L/2 функция y1(x) отрицательна. Это означает, что
дискриминант функции y1(x) отрицателен, а функция убывает. При x=0 и при соблюдении условия l>L/2 функция y1(x) отрицательна. Это означает, что 
Рассмотрим случай l<L/2. При этом зададим продольный размер объекта в виде  где x - некоторый линейный размер, характеризующий на сколько объект меньше соответствующего размера поля зрения объектива (что характерно для класса A3), т.е.
где x - некоторый линейный размер, характеризующий на сколько объект меньше соответствующего размера поля зрения объектива (что характерно для класса A3), т.е.  Тогда
Тогда


Сформируем вторую дискриминантную функцию y2 как разность 
Дискриминант функции y2(x) равен
т.е. такой же, как и для функции y1(x).
При соблюдении условия Ltgα<l·tgα+d дискриминант функции y2(x) отрицателен, а функция будет убывающей. При x=0 функция y2(x) приобретает вид:
Знаменатель выражения для y2(x) положителен при условии, что Ltgα<l·tgα+d, поскольку в этом случае 
Числитель выражения (8) для y2(x) отрицателен при условии, что Ltgα<d. Таким образом, при соблюдении условий l<L/2 и Ltgα<d функция y2(x) при x=0 отрицательна и является убывающей. Это означает, что 
И, наконец, при l=L/2 третья дискриминантная функция y3(x) приобретает вид:
Функция y3(x) является убывающей (D<0) при условии Ltgα<2d, а при x=0 функция равна нулю. При x=0 происходит фактический переход класса B, при котором соблюдаются условия  в класс Г пересечения рубежа объектом с большим продольным размером.
в класс Г пересечения рубежа объектом с большим продольным размером.
Представленный выше анализ дискриминантных функций y1(x), y2(x) и y3(x) показывает, что при пересечении объектом рубежа на любом расстоянии l и при выполнении условия Ltgα<d классы A3 и А4 разделимы, поскольку для класса А4 всегда выполняется условие (6), а для класса A3 справедливо альтернативное соотношение:

Анализ особой точки функций y1(x), y2(x) и y3(x), соответствующей определенной организации рубежа, когда Ltgα=d, показал, что и в этом случае условие (9) для класса А3 справедливо. Однако в этом случае становится недостаточным количество независимых временных откликов для класса A2. Если же d<Ltgα, то нарушаются условия формирования временных отрезков t4, t5, поскольку в этом случае сигнал может раньше появляться на приемнике излучения 2, чем на приемнике 1 (фиг. 1). Справедливость формул, связанных с временами t4, t5, нарушается. Необходимо формировать рубеж таким образом, чтобы соблюдалось неравенство d>Ltgα.
Таким образом, при t1=t2, что допускают только классы A3 и A4, дискриминантные функции (6), (9) позволяют их разделить, а при t1≠t2 в зависимости от того, какое из времен больше (t1>t2 или t1<t2), оказывается возможным разделить классы на две группы, в каждую из которых входит по три класса - А1, A3, A4 или A2, А3, A4. Дискриминантные функции (4) и (5) позволяют выделить из этих групп классы A1 и A2 соответственно, а дальнейшее разделение возможно опять с помощью (6), (9).
Пространственно-временная селекция объекта реализуется с помощью пяти логических функций (дискриминантного набора), зависящих от введенных дискриминантных функций и определяющих алгоритм определения класса пересечения рубежа с помощью анализа временных интервалов t1, t2, t4, t5, Δt1, Δt2:
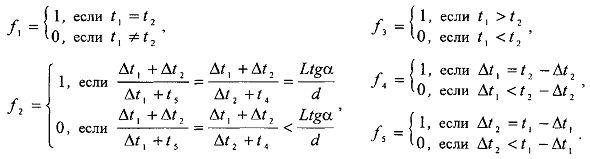
Классам пересечения рубежа А1, А2, А3, А4 сопоставлены булевы функции. В качестве аргументов булевых функций А1, A2, A3, A4 рассматриваются введенные логические функции f1-f5. Таблица истинности булевых функций А1, А2, A3, А4 в соответствии с алгоритмом, представленным на фиг. 2, приведена в таблице 1.
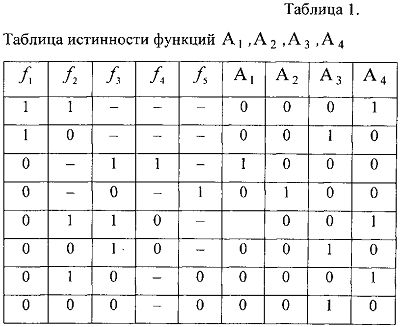
Заданные таблицей истинности булевы функции А1, A2, A3, A4 выражены в дизъюнктивной нормальной форме:


Факт прохождения рубежа объектом контроля фиксируется одной и только одной из булевых функций А1, А2, A3, А4, которая принимает единичное значение в соответствии с классом этого прохождения. Такой выбор происходит на основании анализа временных отрезков t1, t2, t4, t5, Δt1, Δt2, получаемых как результат обработки сигналов с приемников излучения системы. Этот выбор позволяет однозначно оценить параметры объекта g и h, в зависимости от класса прохождения рубежа.
Определяем параметры нарушения.
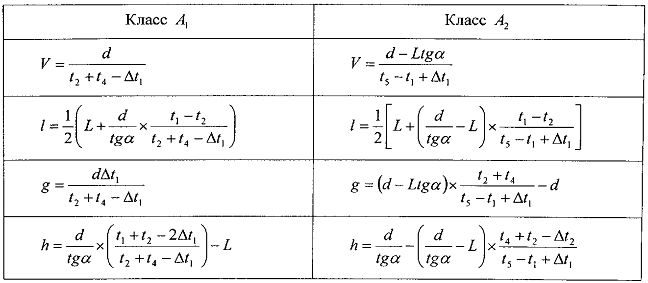
Определяем параметры объекта для классов A1 и A3. Сложение уравнений (2) и (3) дает выражение

откуда с использованием общего признака классов А1 и A3 (VΔt1=g) получаем  При этом
При этом  Вычитая из уравнения (1) уравнение (2), получим
Вычитая из уравнения (1) уравнение (2), получим

откуда находим третий параметр  Складывая уравнения (1) и (2), получим
Складывая уравнения (1) и (2), получим  откуда находим четвертый параметр
откуда находим четвертый параметр 
Определим параметры объекта для класса A2. Для этого класса пересечений рубежа справедливы два равенства (фиг. 1):  и
и  Вычитая из последнего равенства первое, получим
Вычитая из последнего равенства первое, получим  откуда находим
откуда находим  Складывая уравнение (3) с дополнительным уравнением
Складывая уравнение (3) с дополнительным уравнением  для класса А2,
получим
для класса А2,
получим  Подставив в это уравнение полученное значение скорости, найдем второй параметр объекта
Подставив в это уравнение полученное значение скорости, найдем второй параметр объекта  Воспользовавшись уравнением (10), получаем третий параметр объекта
Воспользовавшись уравнением (10), получаем третий параметр объекта  Для получения выражения, определяющего четвертый параметр объекта, используем уравнение (11):
Для получения выражения, определяющего четвертый параметр объекта, используем уравнение (11):
И, наконец, определяем параметры объекта для класса A4. Для этого класса пересечений рубежа справедливы три дополнительных равенства (фиг. 1):  Первое из них дает
Первое из них дает  второе определяет
второе определяет  третье определяет
третье определяет  Использовав уравнение (11), получаем четвертый параметр объекта
Использовав уравнение (11), получаем четвертый параметр объекта 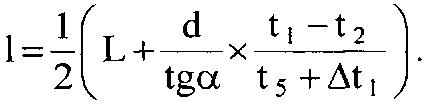
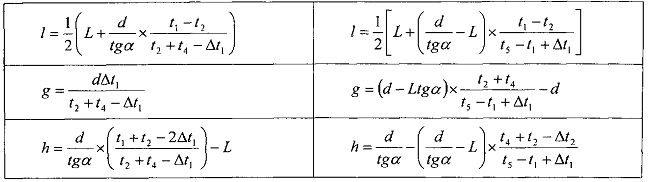
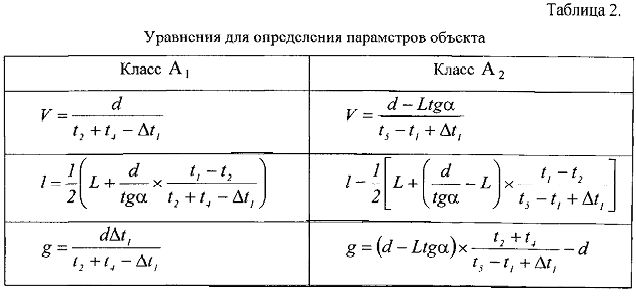
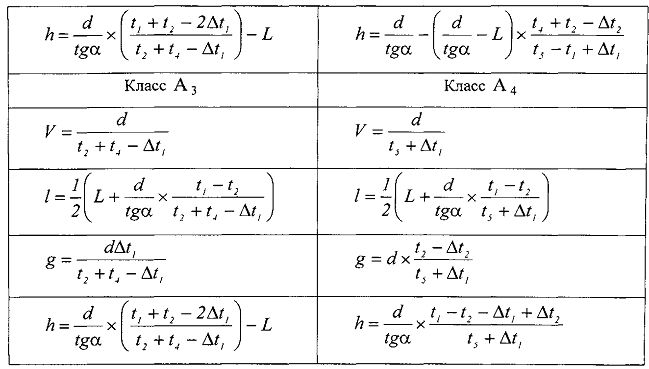
Результаты сведены в таблицу 2.
Классы А1, А2, A3, A4, составляющие генеральную совокупность Ω всех возможных пересечений рубежа, можно идентифицировать (подразумевая под ω класс пересечения рубежа, а под F(ω) - аналитическое выражение булевой функции) следующим образом:
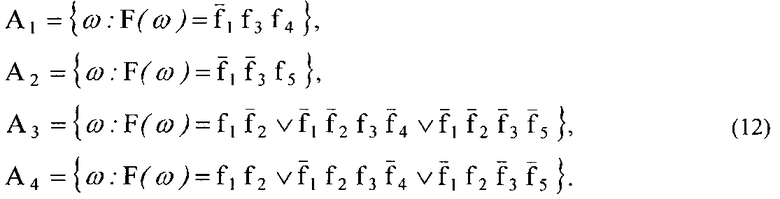
Таким образом, при пересечении объектом-нарушителем рубежа с помощью возникающих в тепловых приемниках временных откликов формируются логические дискриминантные функции f1-f5, однозначно определяющие вариант пересечения рубежа по выражениям (12). После этого, по выражениям таблицы 2 определяются параметры пересечения и в соответствии с назначением системы принимается решение (тревога, сортировка, подсчет и др.).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ НАРУШИТЕЛЯ НА ПРОТЯЖЕННОМ РУБЕЖЕ ОХРАНЫ | 2024 |
|
RU2830683C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ, СКОРОСТИ И УСКОРЕНИЯ ОБЪЕКТА В ПАССИВНОЙ СКАНИРУЮЩЕЙ СИСТЕМЕ ВИДЕНИЯ | 2018 |
|
RU2700275C1 |
| Способ оценки функции тромбоцитов в цельной цитратной крови | 2016 |
|
RU2659421C2 |
| Способ измерения ионосферных предвестников землетрясений | 2018 |
|
RU2695080C1 |
| ДАЛЬНОМЕР С ДВУМЯ ЗРИТЕЛЬНЫМИ ТРУБАМИ, ОБЪЕКТИВЫ КОТОРЫХ РАСПОЛОЖЕНЫ ПО КОНЦАМ БАЗЫ | 1926 |
|
SU7288A1 |
| РОТОРНЫЙ ПРЯМОЗУБЫЙ КОМПРЕССОР | 2000 |
|
RU2180053C2 |
| УСТРОЙСТВО И СПОСОБ ОБНАРУЖЕНИЯ ПРОНИКНОВЕНИЯ ЧЕЛОВЕКА ЧЕРЕЗ КОНТУР ЗАПРЕЩЕННОЙ ЗОНЫ | 2000 |
|
RU2209467C2 |
| СПОСОБ ИЗМЕРЕНИЯ ТОКА КОРОТКОГО ЗАМЫКАНИЯ | 2014 |
|
RU2554282C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРИРАЩЕНИЙ МАГНИТНОГО ПОЛЯ ЗЕМЛИ | 1984 |
|
SU1167965A1 |
| СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ ОБЪЕКТА ПО ЕГО ШУМОИЗЛУЧЕНИЮ | 2015 |
|
RU2593622C1 |
Изобретение относится к области охранной сигнализации. Технический результат - повышение помехоустойчивости обнаружения нарушителя за счет анализа параметров нарушения: размеров объекта-нарушителя, скорости его перемещения и расстояния траектории его движения от сторон охраняемого рубежа.
Изобретение заключается в приеме теплового излучения двумя датчиками, расположенными на противоположных сторонах рубежа на известном расстоянии друг от друга в направлении вдоль его границ. Принятое излучение преобразуется в электрические сигналы с выделением шести временных интервалов, характеризующих длительности сигналов, возникающих в датчиках, от моментов их начала до положительных и отрицательных максимумов (t1, t2, Δt1, Δt2), а также между началами и положительными максимумами сигнала двух датчиков (t4, t5). Все возможные варианты пересечения рубежа, составляющие генеральную совокупность Ω, отличаются друг от друга размерами объекта по отношению к полям зрения объективов и положением траектории движения относительно сторон рубежа. Синтез алгоритма разбиения на классы в области реальных событий основан на поиске соответствующих признаков в области временных откликов, возникающих на приемниках излучения. Разработана экспертная модель в виде набора этих признаков, отличающихся дискриминантными функциями, позволяющая на основе анализа временных интервалов однозначно идентифицировать вариант пересечения рубежа и определить параметры пересечения: продольный и поперечный размеры объекта-нарушителя, скорость его движения и положение траектории относительно сторон рубежа охраны (контроля). На основе оценки полученных параметров пересечения рубежа может быть принято решение, адекватное общему назначению системы: подан сигнал тревоги, произведен подсчет объектов-нарушителей, их сортировка по размерам и др.
2 ил.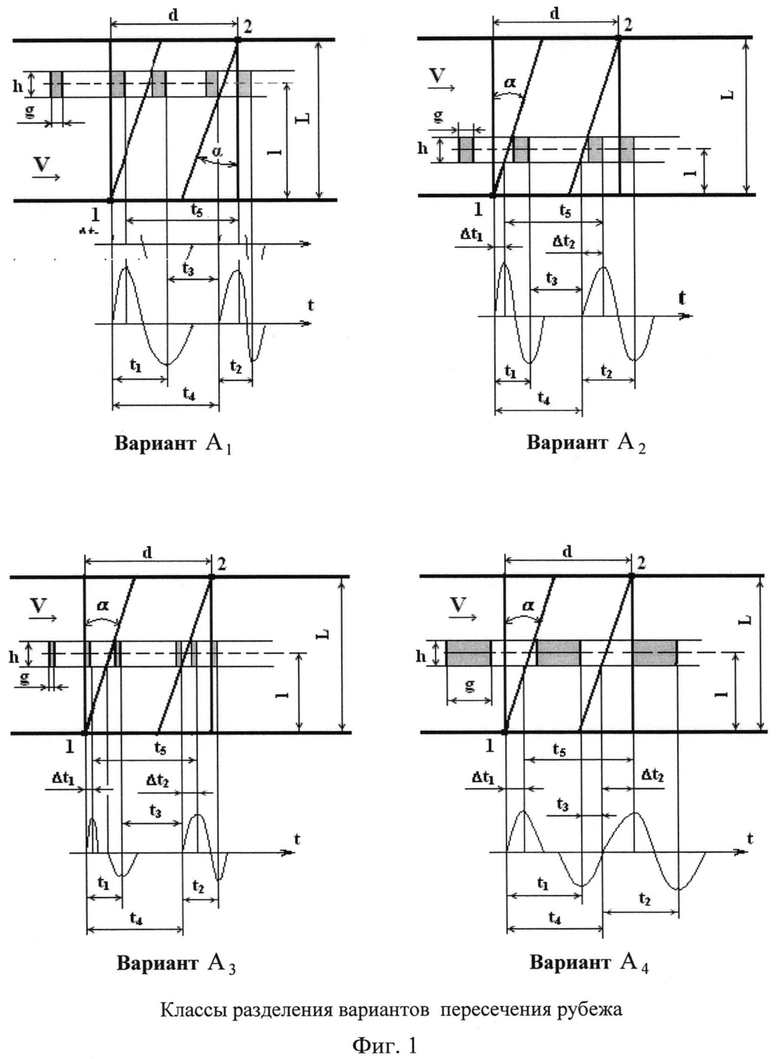
Способ обнаружения нарушителя и определения параметров нарушителя по его тепловому излучению, путем использования тепловых датчиков, расположенных на противоположных сторонах рубежа, преобразования принятого излучения в электрические сигналы, определения временных задержек сигналов друг относительно друга, отличающийся тем, что используют два тепловых датчика с углами полей зрения α, расположенных по одному на каждой из противоположной стороне рубежа протяженностью L, образующие полей зрения которых в горизонтальной плоскости параллельны и одна из них у каждого объектива перпендикулярна противоположной стороне рубежа, а расстояние между ними равно d, по преобразованным принятым этими датчиками излучениям в электрические сигналы определяют временные отрезки: t1 - время от начала вхождения объекта в поле зрения первого объектива до его полного выхода, t2 - время от начала вхождения объекта в поле зрения второго объектива до его полного выхода, t4 - время от начала вхождения объекта в поле зрения первого объектива до начала вхождения объекта в поле зрения второго объектива, t5 - время между максимумами сигналов, возникающих на приемниках излучения обоих объективов, Δt1 - время от начала вхождения объекта в поле зрения первого объектива до достижения сигналом максимума, Δt2 - время от начала вхождения объекта в поле зрения второго объектива до достижения сигналом максимума, с помощью полученных временных отрезков t1, t2, t4, t5, Δt1, Δt2 формируют дискриминантный набор логических функций:
для выявления класса пересечения рубежа вычисляют четыре логических выражения: 

 только одно из которых является истинным и определяет вариант пересечения рубежа, бесконечное множество Ω которых, отличающееся размерами объекта по отношению к полям зрения тепловых датчиков, разделено на четыре несовместных класса, составляющих полную группу событий и удовлетворяющих условию
только одно из которых является истинным и определяет вариант пересечения рубежа, бесконечное множество Ω которых, отличающееся размерами объекта по отношению к полям зрения тепловых датчиков, разделено на четыре несовместных класса, составляющих полную группу событий и удовлетворяющих условию  где
где 
 и в соответствии с выявленным классом определяют параметры нарушителя:
и в соответствии с выявленным классом определяют параметры нарушителя:
где V - скорость перемещения объекта вдоль границ рубежа, h - поперечный размер объекта, g - продольный размер объекта, l - расстояние от первого объектива до траектории движения объекта.
| RU 2058593 C1, 20.04.1996 | |||
| US 4377808 A1, 22.03.1983 | |||
| СПОСОБ И УСТРОЙСТВО КОМБИНИРОВАННОГО ОБНАРУЖЕНИЯ НАРУШИТЕЛЯ И ПЕРЕДАЧИ СИГНАЛОВ РАДИОСООБЩЕНИЙ | 2005 |
|
RU2319211C2 |
| СПОСОБ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ ТЕКУЩЕГО МЕСТОПОЛОЖЕНИЯ НАРУШИТЕЛЯ ОХРАНЯЕМОЙ ЗОНЫ | 2005 |
|
RU2311686C2 |
| Передвижной мебельный гарнитур | 1957 |
|
SU110855A1 |
| US 4179691 A1, 18.12.1979 | |||
| CN 201974900 U, 14.09.2011 | |||
| US 6377174 B1, 23.04.2002 | |||
| US 6774791 B2, 10.08.2004 | |||

