Изобретение относится к геофизике, а более конкретно к магнитометрии, и предназначено для определения параметров магнитного поля Земли (МПЗ) при движении носителя магнитометра.
Цель изобретения повышение точности.
Рассмотрим пример реализации способа. Пусть при каждом цикле измерений одновременно измеряют суммарное МПЗ Ti не менее чем в трех точках (i, i+1, i+2), расположенных на расстоянии l одна от другой вдоль направления движения носителя. Все циклы сдвинуты вдоль этого направления на одинаковое расстояние, равное расстоянию l между соседними точками измерения суммарного МПЗ. Минимальное количество измерений в цикле равно трем. Такое количество измерений позволяет реализовать способ, определить в процессе измерений момент времени, когда должен осуществляться последующий цикл. Максимальное количество измерений в цикле ограничено техническими возможностями. Минимальное количество циклов К, которое должно быть осуществлено на всем маршруте длиной S,
k (n-1) (m-2), (1)
где m количество измерений в каждом цикле; n количество точек, в которых одновременно измеряется суммарное МПЗ, причем
n S/l+1,
откуда
k S/l (m-2).
Приращение переменного МПЗ всякий раз определяют за время, прошедшее между двумя циклами, т. е. за время прохождения носителем расстояния l. В общем случае это неравные промежутки времени Δti.
Будем полагать, что количество измерений в цикле равно трем. При осуществлении первого цикла в момент времени t1 измеряют суммарное МПЗ в точках 1, 2, 3 вдоль направления движения носителя
T'1 T1+B1; T'3 T3+B1; T'2 T2+B1,
где T'1, T'2, T'3 значения суммарного МПЗ;
T1, T2, T3 значения стационарного геомагнитного поля;
B1 значение переменного МПЗ в момент времени t1.
При осуществлении второго цикла в момент времени t2 измеряют суммарное МПЗ в точках 2, 3, 4 вдоль направления движения носителя:
T"2 T2+B2; T"3 T3+B2; T'4 T4+B2.
При осуществлении третьего цикла в момент времени t3 измеряют суммарное МПЗ в точках 3, 4, 5 вдоль направления движения носителя
T'''3 T3+B3; T"4 T4+B3; T'5 T5+B3.
При осуществлении (n-1) цикла в момент времени tn-1 измеряют суммарное МПЗ (СМПЗ) в точках (n-3), (n-2), (n-1) вдоль направления движения носителя
T'''m-3 Tn-3+Bn-1; T"n-2 Tn-2 + Bn-1; T'n-1 Tn-1+Bn-1.
При осуществлении n-го цикла в момент времени tn измеряют СМПЗ в точках (n-2), (n-1), n вдоль направления движения носителя T'''n-2 Tn-2+Bn; T"n-1 Tn-1+Bn; T'n Tn+Bn.
Определяют разности измеренных значений СМПЗ в одних тех же точках



где Δt1= t2-t1; Δt2= t3-t2,...Δtn-1= tn-tn-1.
Разности соответствующих измеренных значений суммарного МПЗ равны величине приращения переменного МПЗ за время, прошедшее между измерениями, и могут быть определены следующим образом:
ΔB1(Δt1) = B2-B1;ΔB2(Δt2) = B3-B2.
ΔBn-1(Δtn-1) = Bn-Bn-1.
Отсюда
B2= B1+ΔB1(Δt1),
B3= B1+ΔB1(Δt1)+ΔB2(Δt2)
Величина В1 переменного МПЗ в момент любого измерения суммарного МПЗ в момент начала измерений и на протяжении всей геомагнитной съемки определяет разницу между истинным значением стационарного геомагнитного поля и полученными в результате измерений величинами. Результаты измерений можно представить в виде функции
T'cj Tcj+B1,
где T'cj значения суммарного МПЗ;
Tcj значения стационарного геомагнитного поля в точках измерений;
j номер точки измерения СМПЗ.
Таким образом, способ позволяет вдоль маршрута движения носителя получить пространственное распределение стационарного геомагнитного поля, измененного на постоянную величину. Этой информации достаточно для решения большого количества геофизических задач, в частности поиска полезных ископаемых. Если же требуется знать значение Tcj, то необходимо в одной точке маршрута определить B1, например, с помощью вариационной станции, что можно сделать в начале или в конце маршрута.
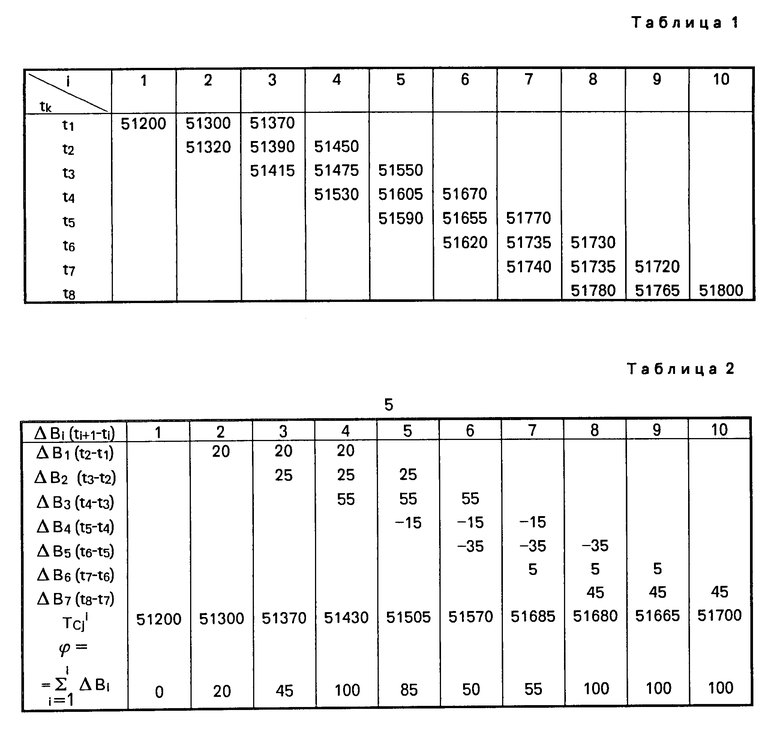
Рассмотрим числовой пример реализации способа. Вдоль маршрута движения носителя проводят измерения и получают значения суммарного МПЗ в десяти равноотстоящих точках ( cм.табл. 1). Каждый цикл включает три одновременных измерения. Полученные значения T'i приведены в табл. 1. Определяют величину изменения переменного МПЗ за время между ближайшими циклами для каждой точки маршрута (см. табл. 2)
t2 t1: ΔB1= 51320-51300 = 20нТл,
t6 t5: ΔB5= 51620-51655 = -35нТл,
t8 t7: ΔB7= 51780-51735 = 45нТл.
Находят изменения переменного МПЗ в промежутки времени между циклами:
B2 B1+20,
B3 B1+20+25,
B4 B1+20+25+55,
B5 B1+20+25+55-15,
B7 B1+20+25+55 15 35+5+45.
Из соответствующих значений суммарного МПЗ T'cj вычитают суммарное значение приращения переменного МПЗ за промежуток времени, прошедший после начала измерений
где j порядковый номер цикла,
и получают (см. табл. 2):
Tc1+B1 512000 0,
T2c+B1 51320 20,
Tc3+B1 51415 45,
Tc4+B1 51530 100,
Tc8+B1 51380 100,
Tc9+B1 51675 100,
Tc10+B1 51800 100.
Таким образом, по результатам измерений СМПЗ, проведенных предлагаемым способом, получены следующие данные: изменение переменного МПЗ плюс постоянная величина, изменение стационарного геомагнитного поля плюс постоянная величина. ТТТ1
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ ОБЪЕКТА ОТНОСИТЕЛЬНО ЗЕМНОЙ ПОВЕРХНОСТИ | 1984 |
|
SU1173887A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СТАЦИОНАРНОГО ГЕОМАГНИТНОГО ПОЛЯ ПРИ ПРОВЕДЕНИИ МОРСКОЙ МАГНИТНОЙ СЪЕМКИ | 2010 |
|
RU2433429C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА ПРИ НАВИГАЦИОННЫХ ИЗМЕРЕНИЯХ | 2012 |
|
RU2529016C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ И СКОРОСТИ В ГРУППЕ ОБЪЕКТОВ СИСТЕМОЙ ДОПЛЕРОВСКИХ ПРИЕМНИКОВ | 2019 |
|
RU2726321C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ И КОМПЕНСАЦИИ ДЕВИАЦИИ МАГНИТОМЕТРИЧЕСКИХ ДАТЧИКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2550774C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СТАЦИОНАРНОГО ГЕОМАГНИТНОГО ПОЛЯ ПРИ ПРОВЕДЕНИИ МОРСКОЙ МАГНИТНОЙ СЪЕМКИ | 2007 |
|
RU2331090C1 |
| СПОСОБ УЧЕТА ВАРИАЦИЙ ГЕОМАГНИТНОГО ПОЛЯ ПО ДОПОЛНИТЕЛЬНЫМ СЕКУЩИМ МАРШРУТАМ ПРИ ВЫПОЛНЕНИИ МАГНИТНЫХ СЪЕМОК НА АКВАТОРИЯХ | 2011 |
|
RU2539097C2 |
| СПОСОБ ТРИАНГУЛЯЦИИ ЦЕЛЕЙ | 2010 |
|
RU2423720C1 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2168704C1 |
| СИСТЕМА УПРАВЛЕНИЯ КАТАПУЛЬТИРУЕМЫМ КРЕСЛОМ СПАСЕНИЯ ЭКИПАЖА | 1998 |
|
RU2144888C1 |
Способ определения приращений магнитного поля Земли (МПЗ), при котором выбирают точки по маршруту движения носителя, проводят в них синхронные измерения суммарного МПЗ на каждом цикле измерений, отличающийся тем, что, с целью повышения точности, выбирают m точек измерения числом не менее трех, расположенных на одинаковом расстоянии l одна от другой, повторяют на заданном отрезке маршрута длиной S циклы измерений не менее, чем S/2-(m-2) раз, проводя каждый следующий цикл измерений при смешении носителя на расстояние l по маршруту движения, сравнивают в каждой точке маршрута измеренные за два последовательных цикла измерений значения суммарного магнитного поля Земли, по которым судят о приращениях МПЗ.
Способ определения приращений магнитного поля Земли (МПЗ), при котором выбирают точки по маршруту движения носителя, проводят в них синхронные измерения суммарного МПЗ на каждом цикле измерений, отличающийся тем, что, с целью повышения точности, выбирают m точек измерения числом не менее трех, расположенных на одинаковом расстоянии l одна от другой, повторяют на заданном отрезке маршрута длиной S циклы измерений не менее чем S/2 (m 2) раз, проводя каждый следующий цикл измерений при смешении носителя на расстояние l по маршруту движения, сравнивают в каждой точке маршрута измеренные за два последовательных цикла измерений значения суммарного магнитного поля Земли, по которым судят о приращениях МПЗ.
| Логачев А.А., Захаров В.П | |||
| Магниторазведка | |||
| - Л.: Недра, 1979, с | |||
| Говорящий кинематограф | 1920 |
|
SU111A1 |
| Патент США N 3490032, 324-3, 1970. | |||
