Изобретение относится к техническим средствам охраны территории объектов и может быть использовано для обнаружения нарушителя, проникающего через зону обнаружения протяженного рубежа охраны.
Известен способ обнаружения нарушителя в контролируемой зоне (См. Патент РФ №2455692 C1, G08B 13/00, G01S 13/26 опубл. 10.07.2012, бюл. №19), заключающийся в том, что контролируемую зону облучают импульсным радиосигналом, при приеме импульсного радиосигнала выделяют изменения его амплитуды и при превышении этими изменениями порогового значения формируют сигнал тревоги, при этом длительность облучающего импульсного радиосигнала, полосу пропускания трактов передачи и приема выбирают такими, чтобы длительность принятого радиосигнала t1 не превышала времени задержки сигнала, отраженного от нарушителя, находящегося на границе контролируемой зоны, относительно прямого сигнала, принимаемого с минимальной задержкой.
Недостатком способа является относительно низкая точность определения текущих координат нарушителя в пределах зоны наблюдения на протяженном рубеже охраны, так как изменения амплитуды импульсного сигнала могут быть вызваны движением не одного, а нескольких нарушителей в разных местах на протяженном рубеже охраны, а также преднамеренными и непреднамеренными электромагнитными помехами, что обусловит низкую точность определения текущих координат нарушителя и частое формирование ложного сигнала тревоги. Кроме того, известный способ применим только на открытых участках местности, на которых отсутствует растительность, движения которой также могут приводить к изменению амплитуды импульсного сигнала в точке приема. Кроме того, на протяженном рубеже охраны необходимо достаточно большое количество формирователей и приемников импульсных радиосигналов для регистрации изменений амплитуды.
Известен способ обнаружения нарушителя на контролируемом рубеже (См. Патент RU 2719505 С1, МПК G08B 13/24, опубликовано 20.04.2020, бюл. №11), заключающийся в том, что на концах рубежа охраны размещают приемник и передатчик, вдоль рубежа охраны размещают на некоторой высоте над землей воздушную проводную линию и дополнительные передатчики, для управления передатчиками соединяют кабельной линией связи все передатчики последовательно друг с другом и с управляющим выходом приемника и обеспечивают последовательное поочередное излучение передатчиками зондирующего сигнала, в приемнике выделяют изменения принимаемого сигнала и по этим изменениям формируют сигнал тревоги.
Недостатком способа является относительно низкая точность определения текущих координат нарушителя в пределах зоны наблюдения на протяженном рубеже охраны, так как изменения принимаемого сигнала и электромагнитного поля в области между проводной линией и землей могут быть вызваны не только нарушителем, но и преднамеренными и непреднамеренными электромагнитными помехами, что обусловит низкую точность определения текущих координат нарушителя и будет приводить к частому формированию ложного сигнала тревоги. Кроме того, сложность в определении координат преодоления рубежа охраны при одновременном преодолении несколькими нарушителями рубежа охраны и направления их движения, а также необходимость достаточно большого количества передатчиков для регистрации изменений электромагнитного поля на протяженном рубеже охраны.
Наиболее близким аналогом (прототипом) по технической сущности к заявленному изобретению является способ обнаружения нарушителя и определения параметров нарушения (см. Патент РФ №2546077, С1. кл. G08B 13/00, опубл. 10.04.2015 г. Бюл. №10). Известный способ заключается в том, что используют два тепловых датчика с углами полей зрения а, расположенных по одному на каждой из противоположной стороне рубежа протяженностью L, образующие полей зрения которых в горизонтальной плоскости параллельны и одна из них у каждого объектива перпендикулярна противоположной стороне рубежа, а расстояние между ними равно d, по преобразованным принятым этими датчиками излучениям в электрические сигналы определяют временные отрезки: t1 - время от начала вхождения объекта в поле зрения первого объектива до его полного выхода, t2 - время от начала вхождения объекта в поле зрения второго объектива до его полного выхода, t4 - время от начала вхождения объекта в поле зрения первого объектива до начала вхождения объекта в поле зрения второго объектива, t5 - время между максимумами сигналов, возникающих на приемниках излучения обоих объективов, Δt1 - время от начала вхождения объекта в поле зрения первого объектива до достижения сигналом максимума, Δt2 - время от начала вхождения объекта в поле зрения второго объектива до достижения сигналом максимума, с помощью полученных временных отрезков t1, t2, t4, t5, Δt1, Δt2 формируют дискриминантный набор логических функций.
Недостатком способа является относительно низкая точность определения текущих координат нарушителя в пределах зоны наблюдения на протяженном рубеже охраны, так как фиксируются только изменения теплового фона на рубеже охраны, которые могут быть вызваны различными факторами или могут быть вызваны несколькими факторами одновременно, например несколькими нарушителями, преодолевающими рубеж охраны на незначительном расстоянии друг от друга, но с разными координатами и с разным направлением движения. Кроме того, сложность в определении текущих координат нарушителя в пределах зоны наблюдения на рубеже охраны и направлении его движения в случае использовании им средств снижения теплового фона, а также необходимость достаточно большого количества датчиков для регистрации изменений теплового фона на протяженном рубеже охраны.
Техническим результатом при использовании заявленного способа обнаружения нарушителя на протяженном рубеже охраны является повышение точности определения текущих координат нарушителя в пределах зоны наблюдения на протяженном рубеже охраны.
Технический результат достигается тем, что в известном способе обнаружения нарушителя на протяженном рубеже охраны, заключающемся в том, что определяют временные отрезки: t1 - время от начала вхождения нарушителя в зону фиксации первого распределенного акустического сенсора до его полного выхода, tn - время от начала вхождения нарушителя в зону фиксации N распределенного акустического сенсора до его полного выхода, дополнительно прокладывают вдоль рубежа охраны N распределенных акустических сенсоров на расстоянии l друг от друга, к каждому из которых через направленный ответвитель подключают источник излучения и фотоприемное устройство. Длину каждого N распределенного акустического сенсора делят на М равные по длине участки. Записывают в память координаты каждого М участка. Одновременно передают от каждого источника излучения по соответствующему N распределенному акустическому сенсору зондирующие оптические импульсы в момент времени отсутствия нарушителя на протяженном рубеже охраны. Принимают фотоприемным устройством в каждом из них поток обратного рассеяния, на основе которого формируют характеристику обратного рассеяния и записывают ее в память. Сопоставляют между собой характеристики обратного рассеяния в каждом N распределенном акустическом сенсоре, хранящиеся в памяти до появления нарушителя с формируемыми характеристиками обратного рассеяния после появления нарушителя на рубеже охраны для выявления изменений спектр-структуры света. Регистрируют координаты и время t изменений спектр-структуры света на М участке в N распределенном акустическом сенсоре. По значениям координат и времени t изменений спектр-структуры света на М участке каждого из N распределенных акустических сенсоров определяют место нахождения нарушителя на рубеже охраны и направление его движения.
Благодаря новой совокупности существенных признаков в заявленном способе реализовано повышение точности определения текущих координат нарушителя в пределах зоны наблюдения на протяженном рубеже охраны за счет регистрации координат и времени изменения спектр-структуры света в каждом из N распределенных акустических сенсоров, неподверженных воздействию преднамеренных и непреднамеренных электромагнитных помех и изменений теплового фона.
Заявленный способ поясняется чертежами, на которых показано:
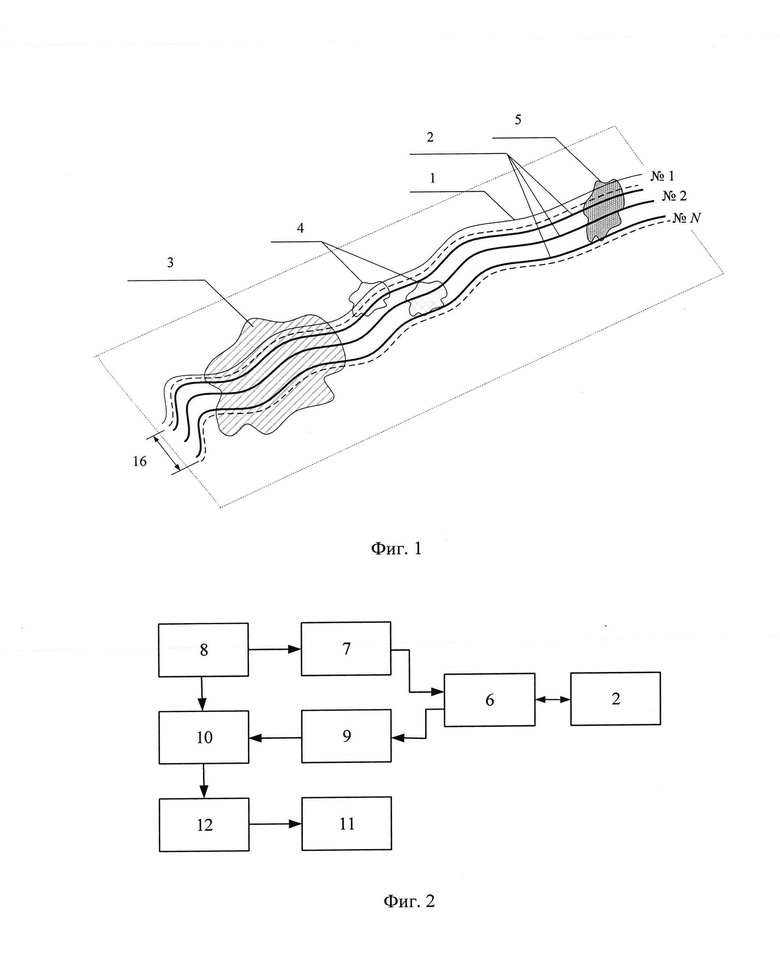
фиг. 1 - размещение N распределенных акустических сенсоров вдоль протяженного рубежа охраны;
фиг. 2 - схема устройства для формирования характеристики обратного рассеяния в распределенном акустическом сенсоре и записи ее в память;
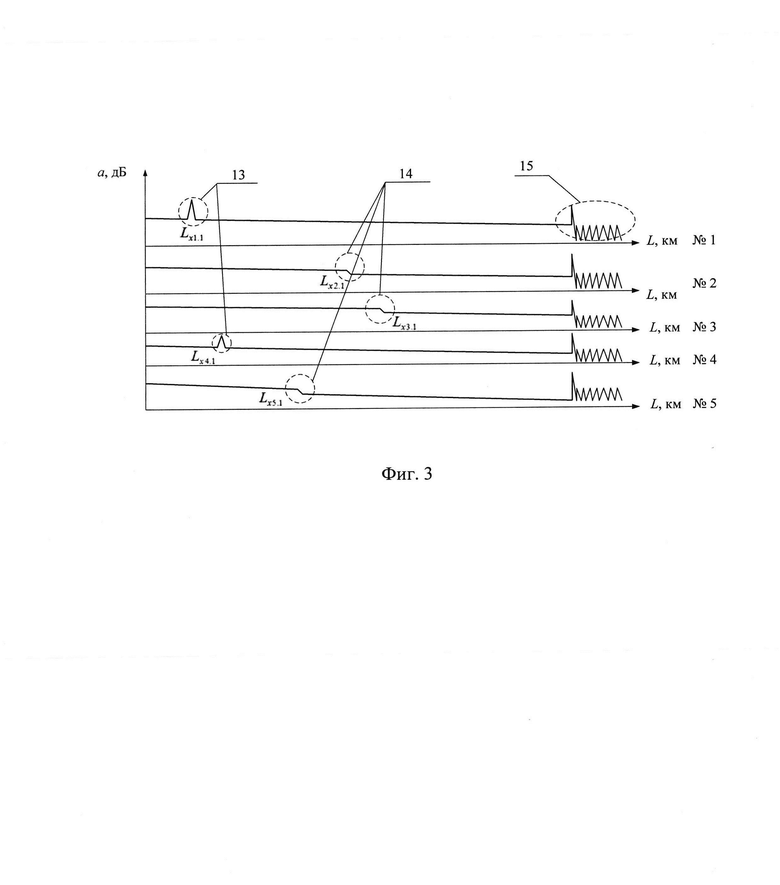
фиг. 3 - характеристики обратного рассеяния в пяти распределенных акустических сенсорах в момент времени отсутствия нарушителя на протяженном рубеже охраны;
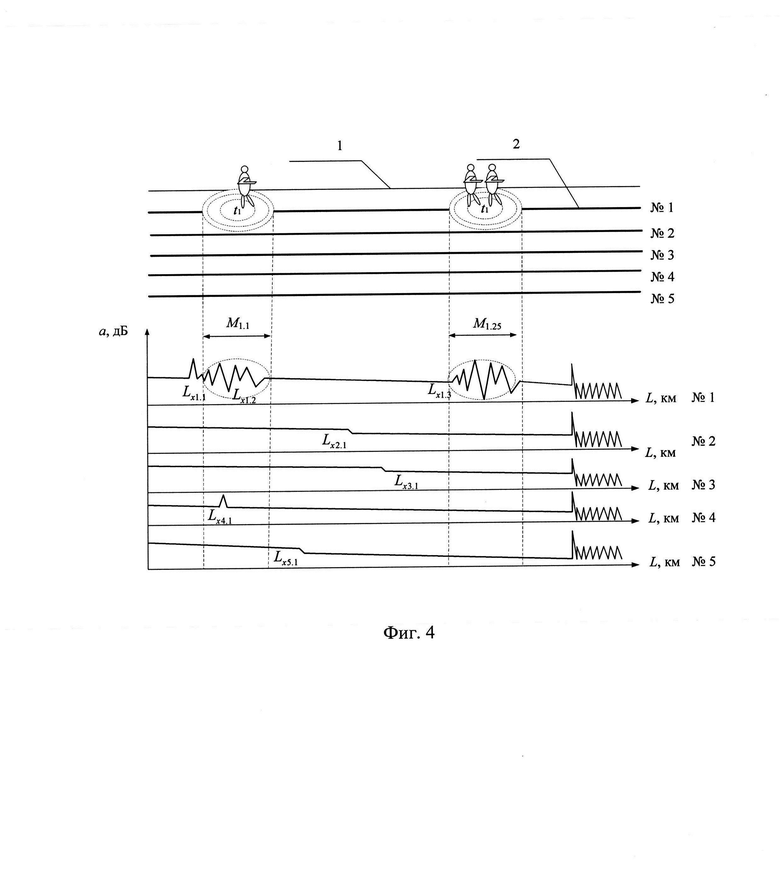
фиг. 4 - характеристики обратного рассеяния в пяти распределенных акустических сенсорах в момент времени t1 при появлении трех нарушителей в разных местах на протяженном рубеже охраны;
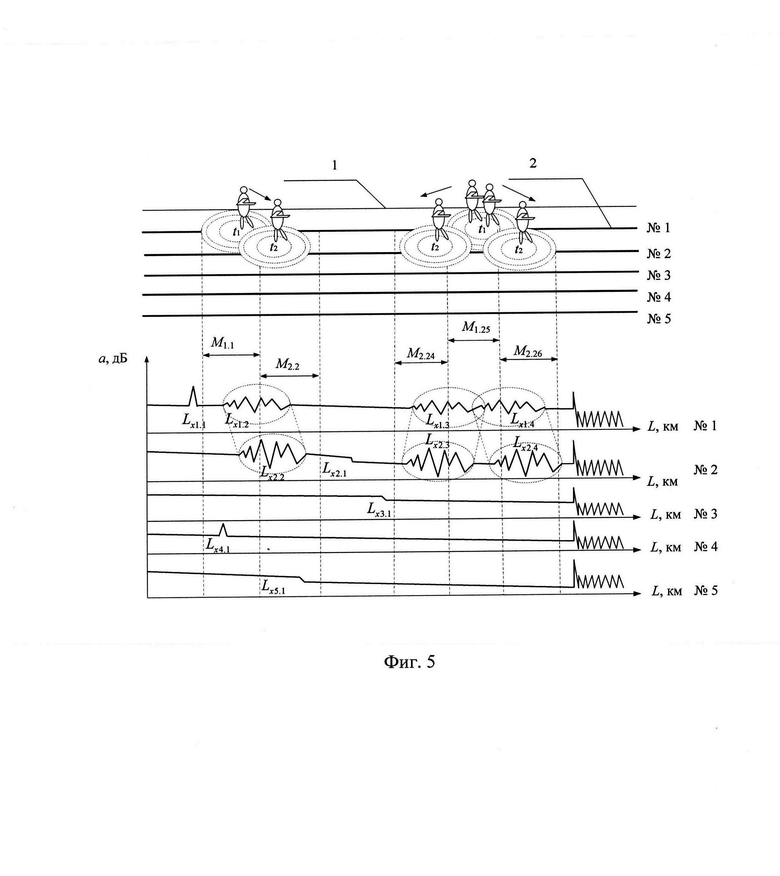
фиг. 5 - характеристики обратного рассеяния в пяти распределенных акустических сенсорах в момент времени t2 при движении трех нарушителей в разных местах на протяженном рубеже охраны;
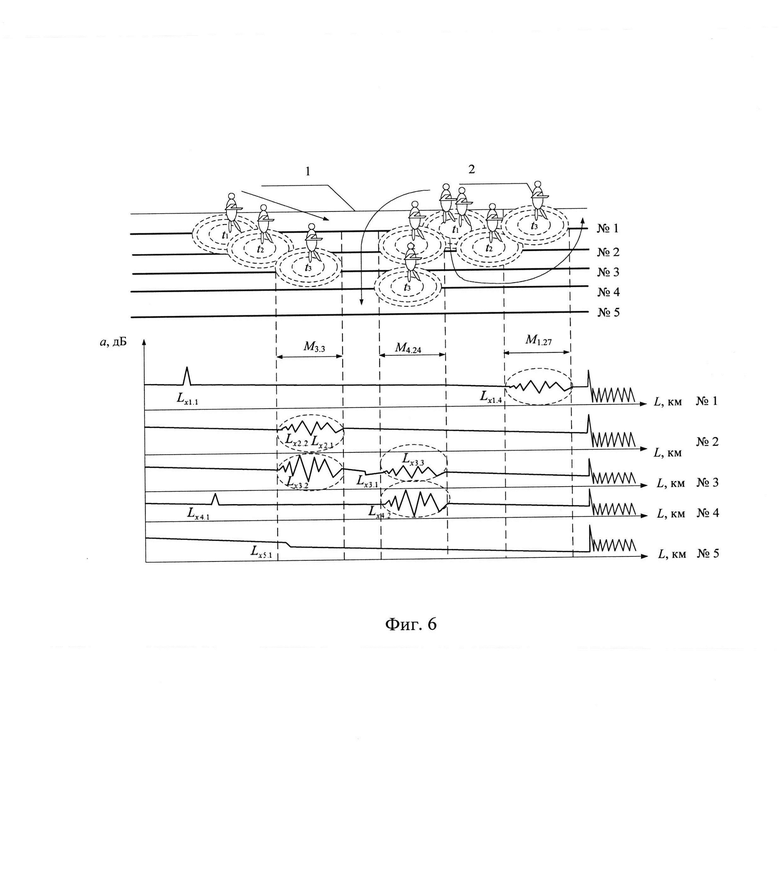
фиг. 6 - характеристики обратного рассеяния в пяти распределенных акустических сенсорах в момент времени t3 при движении трех нарушителей в разных местах на протяженном рубеже охраны;
Прокладывают вдоль рубежа охраны 1 N распределенных акустических сенсоров 2 (фиг. 1), не только на открытой местности, например в поле, но и в лесу 3, в кустарниках 4 и высокой траве 5. Под распределенным акустическим сенсором понимают чувствительный элемент, предназначенный для непрерывного мониторинга виброакустических событий вдоль оптоволоконного кабеля. В качестве чувствительного элемента, как правило, используют стандартное телекоммуникационное одномодовое волокно (G.652, G.655, G.657). Схемы акустического сенсора известны и описаны, например, в патенте RU №128372 U1, опубл. 20.05.2013 «Волоконно-оптическое охранное устройство на основе рэлеевского рассеяния»; патенте RU №2801071 С1, опубл. 01.08.2023 «Устройство для мониторинга виброакустической характеристики протяженного объекта с системой распознавания на основе машинного обучения и нейронных сетей». Прокладывают вдоль рубежа охраны N распределенных акустических сенсоров одним из известных способов, например, прокладкой их в грунт [см. Портнов Э.Л. Принципы построения первичных сетей и оптические кабельные линии связи. Учебное пособие для вузов. - М.: Горячая линия - Телеком, 2017. - 544 с; ил., стр. 490]. Прокладка распределенных акустических сенсоров в грунт обеспечивает скрытность для нарушителей и надежность применения вследствие минимизации воздействия внешних механических факторов на них. На передающиеся по телекоммуникационному одномодовому волокну оптические импульсы не оказывают влияние внешние преднамеренные и непреднамеренные электромагнитные помехи [Оптические телекоммуникационные системы. Учебник для вузов / В.Н. Гордиенко, В.В. Крухмалев, А.Д. Моченов, Р.М. Шарафутдинов. Под ред. Профессора В.Н. Гордиенко. - М: Горячая линия - Телеком, 2011. - 368 с: ил. стр. 14]. Под зоной наблюдения 16 понимают расстояние в глубину между N распределенными акустическими сенсорами, например между первым №1 и последним №N, а также расстояние до первого и после последнего распределенного акустического сенсора, определяемого чувствительностью элемента при фиксации виброакустических событий (фиг. 1).
К каждому из N распределенных акустических сенсоров 2 через направленный ответвитель 6 подключают источник излучения 7 и фотоприемное устройство 9 (фиг. 2). На фиг.2 представлена схема подключения одного N распределенного акустического сенсора, где обозначены: 8 - лазерный генератор, 10 - память (записывающее устройство), 11 - дисплей, 12 - усредняющее устройство. Под оптическим ответвителем понимают пассивное многополюсное (или многопортовое) устройство, в котором оптическое излучение, подаваемое на часть входных полюсов ответвителя, распределяется между его остальными полюсами [Оптические телекоммуникационные системы. Учебник для вузов / В.Н. Гордиенко, В.В. Крухмалев, А.Д. Моченов, Р.М. Шарафутдинов. Под ред. Профессора В.Н. Гордиенко. - М: Горячая линия - Телеком, 2011. - 368 с: ил. стр. 67]. Под источником излучения понимают полупроводниковый лазер, предназначенный для генерации стабильных по мощности, длине волны, длительности и частоте повторения импульсов оптического излучения [Субботин Е.А. Методы и средства измерения параметров оптических телекоммуникационных систем. Учебное пособие для вузов - М: Горячая линия - Телеком, 2018. - 224 с: ил., стр. 63]. Схемы источников излучения известны и описаны, например, в книге Оптические телекоммуникационные системы. Учебник для вузов / В.Н. Гордиенко, В.В. Крухмалев, А.Д. Моченов, Р.М. Шарафутдинов. Под ред. Профессора В.Н. Гордиенко. - М: Горячая линия - Телеком, 2011. - 368 с: ил. стр. 94.
Длину каждого N распределенного акустического сенсора делят на М равные по длине участки. Длину участка выбирают исходя из необходимой точности определения координат нахождения нарушителя на рубеже охраны и протяженности рубежа охраны, например, при протяженности рубежа охраны 1000 метров, длина М участка может составлять 1 метр, а при длине рубежа охраны в 100 км длина М участка может равняться 10 метрам. В первом случае погрешность определения нарушителя на протяженном рубеже охраны составит 0,1%, а во втором случае 0,01%.
Записывают в память координаты каждого М участка. В процессе прокладки распределенных акустических сенсоров определяют географические координаты (х, у) каждого М участка в геодезической системе координат [ГОСТ 32453-2013 Межгосударственный стандарт. Глобальная навигационная спутниковая система. Системы координат. Методы преобразований координат определяемых точек]. Определить координаты каждого М участка, проложенного N распределенного акустического сенсора можно с помощью одного из известных устройств, например, с помощью навигационной аппаратуры потребителя «Грот-В» 14Ц821 [Приемоиндикатор возимый «Грот-В» индекс 14Ц821. Руководство по эксплуатации ЦДКТ.464316.448 РЭ] непосредственно в процессе прокладки сенсора с записью результатов в память или на электронную карту местности.
Одновременно передают от каждого источника излучения по соответствующему N распределенному акустическому сенсору зондирующие оптические импульсы в момент времени отсутствия нарушителя на протяженном рубеже охраны. Передача оптических импульсов по распределенным акустическим сенсорам, в качестве которых используют стандартное телекоммуникационное одномодовое волокно (G.652, G.655, G.657) известна и приведена, например, в книге Оптические телекоммуникационные системы. Учебник для вузов / В.Н. Гордиенко, В.В. Крухмалев, А.Д. Моченов, Р.М. Шарафутдинов. Под ред. Профессора В.Н. Гордиенко. - М: Горячая линия - Телеком, 2011. - 368 с: ил. стр. 28.
Принимают фотоприемным устройством (фиг. 2), в каждом из них поток обратного рассеяния, формируют характеристику обратного рассеяния в каждом N распределенном акустическом сенсоре (фиг. 3) и записывают ее в память. Прием отраженных оптических импульсов осуществляют с помощью одного из известных методов, например метода обратного рассеяния, основанного на введении в оптическое волокно импульсного оптического излучения и последующего анализа на приемнике возвратившегося в результате обратного рассеяния и отражений части светового потока [Портнов Э.Л. Оптические кабели связи, их монтаж и измерение. Учебное пособие для вузов. - 2-е изд., стереотип. - М: Горячая линия - Телеком, 2018. - 448 с: ил., стр. 343]. Определение пространственных координат при мониторинге вибрации грунта в случае приближения нарушителя или нарушителей к N-ому распределенному акустическому сенсору осуществляют по результатам измерения интервала времени между моментом посылки зондирующего импульса и регистрацией импульса обратно рассеянной мощности по формуле  , км, где
, км, где  - измеряемая длина или координата неоднородности ОВ;
- измеряемая длина или координата неоднородности ОВ;  - разность времени между пиками начального и конечного импульсов, с;
- разность времени между пиками начального и конечного импульсов, с;  - скорость света в вакууме, равная 300000 км/с;
- скорость света в вакууме, равная 300000 км/с;  - действительный групповой показатель преломления стекла сердцевины. Прием отраженных оптических сигналов осуществляют с помощью известных устройств, например, оптического рефлектометра во временной области (Optical Time Domain Reflectometer -OTDR) [см. Портнов Э. Л. Принципы построения первичных сетей и оптические кабельные линии связи. Учебное пособие для вузов. - М.: Горячая линия - Телеком, 2017. - 544 с; ил., стр. 461].
- действительный групповой показатель преломления стекла сердцевины. Прием отраженных оптических сигналов осуществляют с помощью известных устройств, например, оптического рефлектометра во временной области (Optical Time Domain Reflectometer -OTDR) [см. Портнов Э. Л. Принципы построения первичных сетей и оптические кабельные линии связи. Учебное пособие для вузов. - М.: Горячая линия - Телеком, 2017. - 544 с; ил., стр. 461].
Движение нарушителя или нарушителей на рубеже охраны изменяют характеристику обратного рассеяния в N распределенном акустическом сенсоре или одновременно в нескольких из них. Путем сопоставления между собой характеристик обратного рассеяния в каждом N распределенном акустическом сенсоре, хранящихся в памяти, до появления нарушителя с формируемыми характеристиками обратного рассеяния после появления нарушителя на рубеже охраны выявляют изменения спектр-структуры света с последующей регистрацией их координат и времени t изменения на М участке в N распределенном акустическом сенсоре.
По значениям координат и времени t изменения спектр-структуры света на М участке каждого из N распределенных акустических сенсоров определяют место нахождения нарушителя на рубеже охраны и направление его движения. Определение направления движения нарушителя на рубеже охраны осуществляют по значениям координат и времени t изменения спектр-структуры света на М участке каждого из N распределенных акустических сенсоров по формуле d = R × arccos (sinϕ1 × sinϕ2 + cosϕ1 × cosϕ2 × cos|λ1 - λ2|), где d - искомое расстояние между М1 и М2 участками каждого из N распределенных акустических сенсоров; R - усредненный радиус Земли, это константа: R = 6371 км; ϕ1, ϕ2 - географические широты M1 и М2 участков; λ1, λ2 - географические долготы M1 и М2 участков.
Пример. Вдоль протяженного рубежа охраны размещены 5 распределенных акустических сенсоров, по которым передаются оптические сигналы в виде зондирующих импульсов. Характеристики обратного рассеяния в пяти распределенных акустических сенсорах в момент времени отсутствия нарушителя на протяженном рубеже охраны представлено на фиг.3, где обозначены 13 - отдельная реализация характеристики обратного рассеяния в виде коннектора или микротрещины, 14 - отдельная реализация характеристики обратного рассеяния в виде сварки или изгиба, 15 - конец оптического волокна и шум. Данные отдельные реализации характеристики обратного рассеяния записываются в виде рефлектограммы в память 10 (фиг.2).
В момент времени t1, например в 12.00 ч и 00 с, к рубежу охраны приближаются несколько нарушителей, что приведет к вибрации грунта и, следовательно, к регистрации изменений спектр-структуры света и характеристик обратного рассеяния в первом распределенном акустическом сенсоре (фиг.4). Так как координаты каждого М участка первого проложенного распределенного акустического сенсора известны, то регистрируют Lx1.2 на участке М1.1, например, Lx1.2=54,57668586698301 с.ш. и 39,80882559019851 в.д. и M1.25 Lx1.3, например Lx1.3=54,57683802758575 с.ш. и 39,80839812256351 в.д. В остальных четырех распределенных акустических сенсорах изменения спектр-структуры света в момент времени t\ не фиксируют (фиг.4). В момент времени, например, 12.00 ч и 03 с регистрируют изменения спектр-структуры света в первом и втором распределенных акустических сенсорах, а в остальных - изменения спектр-структуры света отсутсвуют, при этом в первом распределенном акустическом сенсоре изменения спектр-структуры света на участке М1.1 по амплитуде уменьшаются, а на участке М22 во втором распределенном акустическом сенсоре с координатами 54,576759100560295 с.ш. и 39,8088191658784 в.д. наоборот увеличиваются. В то же время на участке M1.25 изменения спектр-структуры света по амплитуде уменьшаются, а на участках М2.24 и М2.26 наоборот увеличиваются. На интервале времени t3, например 12.00 ч и 06 с, регистрируют изменения спектр-структуры света на участке М3.3 третьего распределенного акустического сенсора с координатами Lx3.2 - увеличение амплитуды и одновременно с этим уменьшение по амплитуде на участке М2.3 во втором распределенном акустическом сенсоре с координатами Lx2.2. Кроме того, на интервале времени t3 регистрируют изменения спектр-структуры света на участке M1.27 с координатами Lx1.4 в первом акустическом сенсоре, а в третьем распределенном акустическом сенсоре на участке М3.24 изменения спектр-структуры света по амплитуде уменьшаются а на участке М4.24 в четвертом распределенном акустическом сенсоре увеличиваются. По разнице во времени между изменениями спектр-структуры света в каждом из 5 распределенных акустических сенсоров, зная координаты каждого участка, определяют место нахождения нарушителя на рубеже охраны и направление его движения. Например, первый нарушитель проник на рубеж охраны в участке М1.1 с координатами 54,57668586698301 с.ш. и 39,80882559019851 в.д. Его направление движения на северо-восток со скоростью ≈5 км/ч, второй нарушитель движется на восток со скоростью ≈5 км/ч, а третий на север со скоростью ≈7 км/ч.
На основании этих результатов можно сделать вывод, что заявленный способ обеспечивает повышение точности определения текущих координат нарушителя в пределах зоны наблюдения на протяженном рубеже охраны, т.е. реализуется сформулированный технический результат.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПРОТЯЖЕННЫХ РУБЕЖЕЙ ОХРАНЫ | 2023 |
|
RU2822878C1 |
| ПАССИВНЫЙ МЕТОД И СИСТЕМА ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ В ВОДЕ ОБЪЕКТОВ | 2010 |
|
RU2488844C2 |
| ИНФРАКРАСНАЯ АКТИВНАЯ СИСТЕМА ДЛЯ КОНТРОЛЯ ПРОТЯЖЕННЫХ РУБЕЖЕЙ ОХРАНЫ | 2014 |
|
RU2573261C2 |
| ПРОЛОЖЕННАЯ В ЗЕМЛЕ ВОЛОКОННО-ОПТИЧЕСКАЯ ТЕЛЕКОММУНИКАЦИОННАЯ СИСТЕМА АБОНЕНТСКОГО ДОСТУПА И ВОЛОКОННО-ОПТИЧЕСКАЯ ОХРАННАЯ СИСТЕМА КРУПНОГО ХОЗЯЙСТВЕННОГО ОБЪЕКТА (ВАРИАНТЫ) С ИСПОЛЬЗОВАНИЕМ ПРОЛОЖЕННОЙ В ЗЕМЛЕ ВОЛОКОННО-ОПТИЧЕСКОЙ ТЕЛЕКОММУНИКАЦИОННОЙ СИСТЕМЫ АБОНЕНТСКОГО ДОСТУПА | 2014 |
|
RU2591205C2 |
| СПОСОБ ОПЕРАТИВНОГО КОНТРОЛЯ МЕСТОПОЛОЖЕНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА, ЕГО СКОРОСТИ И ЦЕЛОСТНОСТИ | 2021 |
|
RU2794238C1 |
| СПОСОБ КОНТРОЛЯ ПОЛЯ ВИБРАЦИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2568417C1 |
| Многоканальный распределенный волоконно-оптический датчик для мониторинга и охраны протяженных объектов | 2022 |
|
RU2797773C1 |
| СИСТЕМА БЕЗОПАСНОСТИ ВОЛОКОННО-ОПТИЧЕСКОЙ ЛИНИИ СВЯЗИ И СПОСОБ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ВОЛОКОННО-ОПТИЧЕСКОЙ ЛИНИИ СВЯЗИ | 2019 |
|
RU2698097C1 |
| СПОСОБ ДИНАМИЧЕСКОЙ РЕКОНФИГУРАЦИИ ВОЛОКОННО-ОПТИЧЕСКОЙ СЕТИ СВЯЗИ | 2023 |
|
RU2806055C1 |
| Волоконно-оптический распределительный виброакустический датчик на основе фазочувствительного рефлектометра и способ улучшения его характеристик чувствительности | 2017 |
|
RU2650853C1 |
Изобретение относится к техническим средствам охраны территории объектов и может быть использовано для обнаружения нарушителя, проникающего через зону обнаружения протяженного рубежа охраны. Технический результат заключается в повышении точности определения текущих координат нарушителя в пределах зоны наблюдения на протяженном рубеже охраны. Способ обнаружения нарушителя на протяженном рубеже охраны характеризуется тем, что прокладывают вдоль рубежа охраны N распределенных акустических сенсоров. Одновременно передают от каждого источника излучения по соответствующему N распределенному акустическому сенсору зондирующие оптические импульсы в момент времени отсутствия нарушителя на протяженном рубеже охраны. Регистрируют координаты и время t изменения спектр-структуры света на М участке в N распределенном акустическом сенсоре. По значениям координат и времени t изменения спектр-структуры света на М участке каждого из N распределенных акустических сенсоров определяют место нахождения нарушителя на рубеже охраны и направление его движения. 6 ил.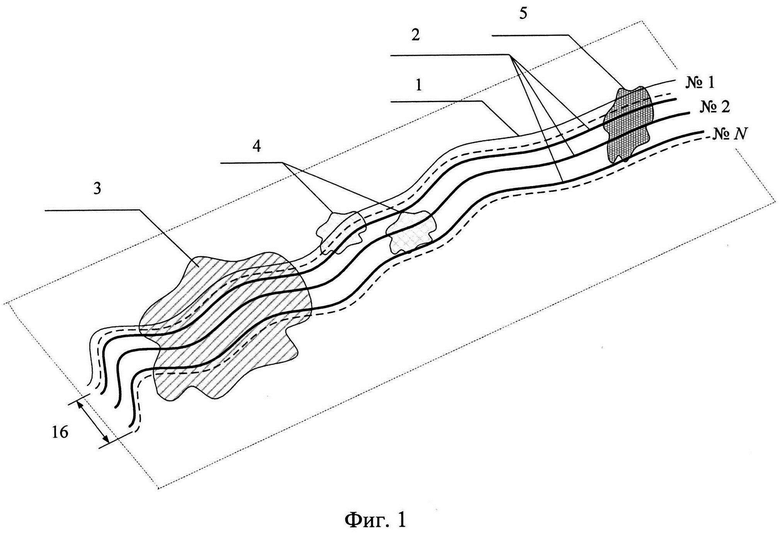
Способ обнаружения нарушителя на протяженном рубеже охраны, в котором определяют временные отрезки: t1 - время от начала вхождения нарушителя в зону фиксации первого распределенного акустического сенсора до его полного выхода, tn - время от начала вхождения нарушителя в зону фиксации N распределенного акустического сенсора до его полного выхода, отличающийся тем, что прокладывают вдоль рубежа охраны N распределенных акустических сенсоров на расстоянии l друг от друга, к каждому из которых через направленный ответвитель подключают источник излучения и фотоприемное устройство, длину каждого N распределенного акустического сенсора делят на М равных по длине участков, записывают в память координаты каждого М участка, одновременно передают от каждого источника излучения по соответствующему N распределенному акустическому сенсору зондирующие оптические импульсы в момент времени отсутствия нарушителя на протяженном рубеже охраны, принимают фотоприемным устройством в каждом из них поток обратного рассеяния, на основе которого формируют характеристику обратного рассеяния и записывают ее в память, сопоставляют между собой характеристики обратного рассеяния в каждом N распределенном акустическом сенсоре, хранящиеся в памяти, до появления нарушителя с формируемыми характеристиками обратного рассеяния после появления нарушителя на рубеже охраны для выявления изменений спектр-структуры света, регистрируют координаты и время t изменений спектр-структуры света на М участке в N распределенном акустическом сенсоре, по значениям координат и времени t изменений спектр-структуры света на М участке каждого из N распределенных акустических сенсоров определяют место нахождения нарушителя на рубеже охраны и направление его движения.
| СПОСОБ ОБНАРУЖЕНИЯ НАРУШИТЕЛЯ И ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ НАРУШЕНИЯ | 2014 |
|
RU2546077C1 |
| Способ изготовления гонков для ткацких челноков | 1959 |
|
SU128372A1 |
| Устройство для мониторинга виброакустической характеристики протяженного объекта с системой распознавания на основе машинного обучения и нейронных сетей | 2023 |
|
RU2801071C1 |
| СПОСОБ ПОИСКА ОБЪЕКТА С ИСПОЛЬЗОВАНИЕМ УСТРОЙСТВА ВЕРИФИКАЦИИ И СООТВЕТСТВУЮЩИЕ УСТРОЙСТВА | 2010 |
|
RU2554478C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ ЭЛЕКТРОПРОВОДЯЩИХ ОБЪЕКТОВ | 2005 |
|
RU2303290C2 |
| ПРОВОДНО-ВОЛНОВОЕ СРЕДСТВО ОБНАРУЖЕНИЯ НАРУШИТЕЛЯ | 1999 |
|
RU2157563C1 |
| ВИБРОМЕТРИЧЕСКАЯ СИСТЕМА ДЛЯ КОНТРОЛЯ ПРОТЯЖЕННЫХ РУБЕЖЕЙ ОХРАНЫ | 2013 |
|
RU2541129C2 |
| Способ производства ферроизвести | 1979 |
|
SU834166A1 |
| Способ ионно-плазменного нанесения коррозионностойких пленочных покрытий на изделия из циркониевых сплавов | 2020 |
|
RU2816323C1 |
| US 20220113169 A1, 14.04.2022. | |||

