Изобретение относится к медицинской технике, к устройствам, обеспечивающим тактильные ощущения при манипулировании удлиненными инструментами. Может быть использовано при моделировании медицинского вмешательства, где катетеры и другие инструменты вводятся через входное отверстие для взаимодействия с виртуальной средой, преимущественно в медицинских тренажерах при обучении.
Известен патент №2461866, МПК G06F 3/01, 2007 г. «Силовая обратная связь для устройства ввода». Изобретение относится к устройству ввода и обеспечения тактильной обратной связи к пальцу пользователя при вводе информации к мобильным терминалам. Устройство ввода снабжено средством для обнаружения касания пальца и средством обеспечения тактильной обратной связи к пальцу, чтобы подтвердить включение. Тактильная обратная связь содержит три удлиненных объекта из металлов с памятью формы. Каждый объект размещен так, чтобы взаимодействовать с одним средством смещения, и сокращается в ином направлении, чем остальные. Устройство обеспечивает обратную тактильную связь к пальцу при вводе информации. Данный привод не может быть применен для удлиненных медицинских инструментов (катетеры и др.), так как он обеспечивает очень малые перемещения (3-5% от длины объекта с памятью формы). Тогда как в реальных медицинских вмешательствах требуются перемещения инструментов до нескольких десятков сантиметров.
Известен патент США №20130224710 A1 от 1.09.2010 г. «Robotic device for use in image-guided robot assisted surgical training» («Роботизированное устройство для применения в обучении хирургическим операциям»).
Автоматизированное устройство записывает процедуру проведения операции хирургом и воспроизводит эту процедуру для стажера хирурга, который изучает эти навыки, в том числе и тактильные ощущения. Устройство имеет четыре степени свободы.
Поступательное движение инструмента осуществляется зубчатой передачей, причем зубчатая рейка расположена по всей длине инструмента (Фиг.3 и 6). Вращательное движение инструмента осуществляется двумя сферическими арками (Фиг.2, 3. позиция 328). Недостаток устройства обусловлен сложностью в изготовлении.
Наиболее близким по техническому решению и достигаемому результату является «Привод для продолговатого объекта с устройством генерации обратной связи по усилию», патент США 20070063971 A1, опубликован 22.03.2007 г., который взят нами за прототип. Привод обеспечивает продольные и вращательные перемещения продолговатого объекта (катетера) с инструментом с генерацией тактильных ощущений по усилию. Это обеспечивается электромагнитным тормозным устройством, которое позволяет с помощью электромагнита и валков создавать заданное сопротивление продольному перемещению инструмента. Вращательное движение также обеспечивается валками с приводом. Линейное и вращательные перемещения инструмента имеют тормозные системы. По мере движения инструмента процессор непрерывно получает информацию от следящего устройства и выбирает расчетное тормозное усилие. Устройство может быть использовано для обеспечения реалистичных ощущений при моделировании медицинского вмешательства, где катетеры или другие инструменты вводятся через входное отверстие для взаимодействия с виртуальной средой. Основным элементом торможения в приводе генерации обратной тактильной связи является трение между валками и инструментом. Поверхность валков, контактирующих с инструментом, будет изнашиваться по мере работы тормозных устройств, что приведет к изменению усилий торможения от заданных значений. Причем эти изменения будут происходить постоянно. Это приведет к изменению заданных значений тактильных ощущений. Устройства линейного движения инструмента и вращательное могут работать только каждое в отдельности, поочередно, что снижает технические возможности привода. В реальности же требуется совмещение обоих движений.
Решаемая техническая задача - повышение точности тактильных ощущений, заданных программой и расширение технических возможностей привода.
Решаемая техническая задача в приводе для генерации обратной тактильной связи на инструмент по усилию, содержащем устройства линейного перемещения и вращательного движений удлиненного инструмента с устройствами регулируемого торможения и датчики слежения за перемещениями удлиненного инструмента, достигается тем, что устройство линейного перемещения удлиненного инструмента и устройство регулируемого торможения выполнены воедино в виде линейного электромагнитного двигателя, а устройство вращательного движения с устройством регулируемого торможения выполнены в виде электромагнитного двигателя, где удлиненный инструмент выполнен в виде трубчатого инструмента с магнитами внутри и располагается внутри линейного электромагнитного двигателя, осуществляющего регулируемое линейное перемещение трубчатого инструмента, который взаимодействует с ротором электромагнитного двигателя, например, шлицевым соединением, при этом двигатели линейного перемещения и вращательного движений расположены соосно и снабжены блоками управления двигателями, взаимодействующими с блоком сопряжения.
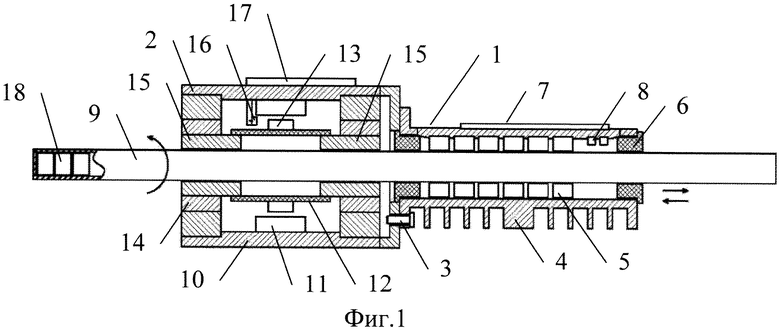
На фиг. 1 представлен общий вид привода для генерации обратной тактильной связи на трубчатый инструмент по усилию;
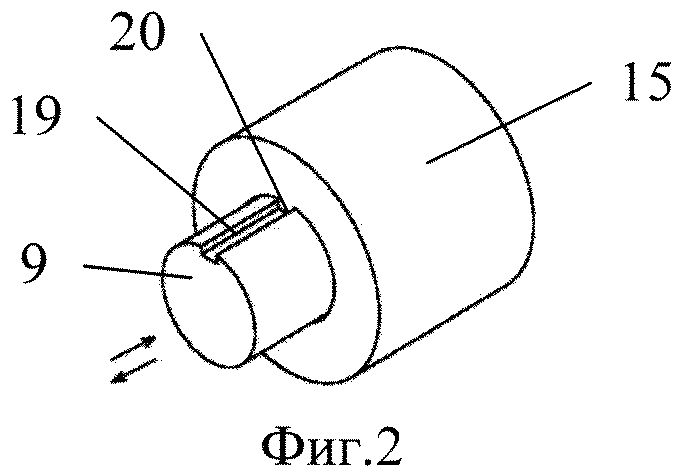
на фиг. 2 - шлицевое соединение, с прямоточным профилем зуба, трубчатого инструмента и направляющей втулки ротора;
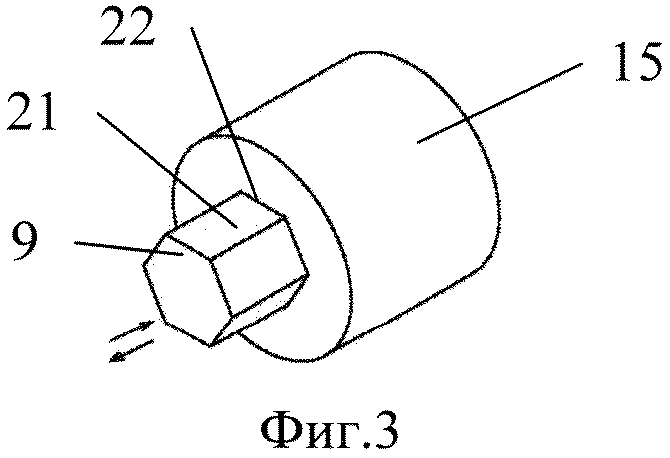
на фиг. 3 - шлицевое соединение трубчатого инструмента и направляющей втулки ротора, где взаимодействующие поверхности выполнены в виде поверхности многогранника.
на фиг. 4 - вариант применения привода с обратной тактильной связью.
Привод для генерации обратной тактильной связи на инструмент по усилию состоит из устройства линейного перемещения трубчатого инструмента и устройства регулируемого торможения, выполнеными в виде линейного электромагнитного двигателя 1 и устройства вращательного движения с устройством регулируемого торможения, выполненным в виде электромагнитного двигателя 2 фиг. 1. Линейный электромагнитный двигатель 1 и электромагнитный двигатель 2 расположены соосно и соединены между собой болтами 3. Линейный электромагнитный двигатель 1 содержит корпус 4, внутри которого размещены с постоянным шагом катушки 5, создающие при работе «бегущее» синусоидальное магнитное поле. По торцам двигателя 1 расположены подшипники скольжения 6. На корпусе двигателя 1 установлены блок 7 управления двигателем и датчики 8 слежения за перемещением трубчатого инструмента 9. Электромагнитный двигатель 2 содержит корпус статора 10, внутри которого размещены катушки 11, а на корпусе 12 ротора вращения установлены магниты 13. По торцам двигателя 2 расположены подшипники вращения 14 и направляющие втулки 15, впрессованные в подшипники, которые неподвижно соединены с корпусом ротора 12. Внутри корпуса статора 10 расположены датчики слежения 16 за вращательными движениями трубчатого инструмента 9. На корпусе электромагнитного двигателя расположен блок 17 управления двигателем. Трубчатый инструмент 9 с магнитами 18 внутри располагается внутри линейного электромагнитного двигателя 1 и взаимодействует с ротором электромагнитного двигателя 2, например, шлицевым соединением, которое позволяет передавать крутящий момент и линейно перемещать инструмент.
На фиг. 2, 3 представлены варианты шлицевого соединения направляющей втулки 15 ротора с трубчатым инструментом 9. На фиг. 2 представлен трубчатый инструмент с пазом 19 по всей длине, в который входит для зацепления с зубом с прямоточным профилем 20. На фиг. 3 трубчатый инструмент выполнен в виде многогранника 21, где внутренняя поверхность 22 направляющей втулки аналогична поверхности трубчатого инструмента.
Пример конкретной реализации представлен на фиг. 4. Привод для генерации обратной тактильной связи на инструмент по усилию работает следующим образом. При отключенных двигателях 1, 2 трубчатый инструмент 9 может свободно перемещаться и вращаться, при этом происходит только отслеживание его перемещения и вращения соответствующими датчиками 8, 16. Генерация обратной тактильной связи осуществляется созданием заданных сил, препятствующих перемещению трубчатого инструмента. Данные о положении трубчатого инструмента могут быть использованы в моделируемом виртуальном пространстве, где положение виртуального инструмента будет синхронизировано с положением трубчатого инструмента в приводе. В блок сопряжения 23 поступают сигналы заданного торможения 24, а сигналы управления поступают на блоки управления двигателями 7, 17. При подаче сигнала 25 на блок 7 подается соответствующий сигнал для подачи необходимого напряжения на катушки 5. Магнитное поле, возникающее в катушках, взаимодействует с магнитами 18 в трубчатом инструменте 9 и создает усилие, препятствующее (тормозящее) перемещению инструмента оператором. Тормозящее усилие регулируется напряжением, подаваемым на катушки 5. Усилия торможения при вращении трубчатого инструмента 9 в электромагнитном двигателе 2 создается аналогичным образом. От блока сопряжения 23 на блок управления двигателем 17 подается сигнал 26 подачи напряжения на катушки 11. Магнитное поле, возникающее в катушках, взаимодействует с магнитами 13. Результирующее магнитное поле катушек статора пытается повернуть ротор вместе с трубчатым инструментом, образуя вращательное усилие на трубчатый инструмент 9, которое препятствует дальнейшему повороту трубчатого инструмента оператором, создавая тактильное ощущение на трубчатом инструменте. Усилие торможения вращению регулируется изменением напряжения. Так как катушки 5 в двигателе круглые, то внутри них создается равномерное магнитное поле, вследствие чего воздействие на трубчатый инструмент, равное со всех сторон, и подшипники скольжения 6 испытывают лишь незначительные нагрузки. Сила трения в приводе при свободном перемещении трубчатого инструмента 9 величина постоянная, такой она сохранится и при торможении электромагнитным полем. В рассматриваемом приводе противодействие перемещениям трубчатого инструмента осуществляется бесконтактным способом, это и позволяет повысить точность тактильных ощущений, заданных программой.
Привод для генерации обратной тактильной связи на инструмент по усилию позволяет одновременно осуществлять линейные перемещения с вращением трубчатого инструмента, при этом при осуществлении торможения линейного перемещения трубчатого инструмента не происходит торможения вращения трубчатого инструмента в отличие от прототипа, где торможение инструмента за счет прижимного валика одновременно приводит и к торможению вращательного движения трубчатого инструмента. Таким образом, привод в заявляемом техническом решении имеет две независимые степени свободы, в каждой из которых возможно торможение трубчатого инструмента, это значительно расширяет технические возможности привода.
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм генерации усилия на имитатор медицинского инструмента | 2015 |
|
RU2639800C2 |
| Имитатор вентрикулоскопа | 2017 |
|
RU2679110C1 |
| РАДИАЛЬНОЕ ВИБРАЦИОННОЕ УСТРОЙСТВО | 2011 |
|
RU2569950C2 |
| ОЦЕНКА УСИЛИЯ НА РОБОТОХИРУРГИЧЕСКОМ ИНСТРУМЕНТЕ | 2019 |
|
RU2721462C1 |
| ЛЕБЕДКА ПРЯМОГО ПРИВОДА С ПОСТОЯННЫМИ МАГНИТАМИ | 2010 |
|
RU2553793C2 |
| СПОСОБ БУРЕНИЯ СКВАЖИНЫ И ОДНОВРЕМЕННОГО НАПРАВЛЕНИЯ БУРОВОЙ КОРОНКИ АКТИВНО УПРАВЛЯЕМОЙ ВРАЩАТЕЛЬНОЙ НАПРАВЛЯЕМОЙ БУРОВОЙ СИСТЕМОЙ И АКТИВНО УПРАВЛЯЕМАЯ ВРАЩАТЕЛЬНАЯ НАПРАВЛЯЕМАЯ СИСТЕМА | 1999 |
|
RU2239042C2 |
| Линейно-цепной электродвигатель | 2020 |
|
RU2736775C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ИНОРОДНОГО ТЕЛА ВНУТРИ ПАЦИЕНТА ВНЕШНИМ МАГНИТНЫМ ПОЛЕМ | 2017 |
|
RU2667880C1 |
| УСТРОЙСТВО ДЛЯ УСТАНОВКИ ОБЪЕКТА | 2019 |
|
RU2762451C1 |
| ГРАВИРОВАЛЬНОЕ УСТРОЙСТВО (ВАРИАНТЫ) | 2010 |
|
RU2429139C1 |
Изобретение относится к медицинской технике и может быть использовано в медицинских тренажерах. Привод содержит устройства линейного перемещения и вращательного движений удлиненного инструмента с устройствами регулируемого торможения и датчики слежения за перемещениями удлиненного инструмента. Устройство линейного перемещения удлиненного инструмента и устройство регулируемого торможения выполнены воедино в виде линейного электромагнитного двигателя. Устройство вращательного движения с устройством регулируемого торможения выполнены в виде электромагнитного двигателя, где удлиненный инструмент выполнен в виде трубчатого инструмента с магнитами внутри и располагается внутри линейного электромагнитного двигателя, осуществляющего регулируемое линейное перемещение трубчатого инструмента, который взаимодействует с ротором электромагнитного двигателя, например, шлицевым соединением. Двигатели линейного перемещения и вращательного движений расположены соосно и снабжены блоками управления двигателями, взаимодействующими с блоком сопряжения. Изобретение обеспечивает повышение точности тактильных ощущений и расширение технических возможностей привода. 4 ил.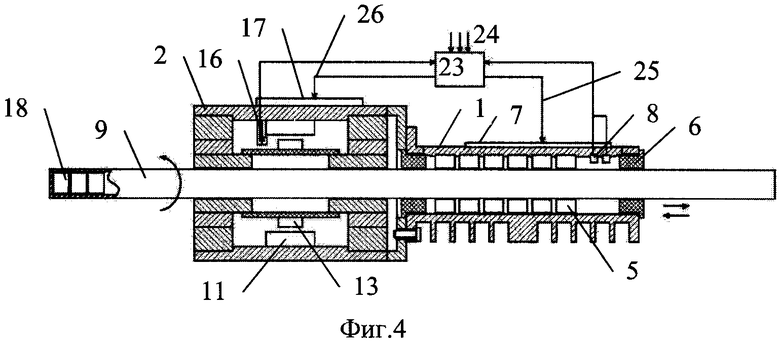
Привод для генерации обратной тактильной связи на инструмент по усилию, содержащий устройства линейного перемещения и вращательного движений удлиненного инструмента с устройствами регулируемого торможения и датчики слежения за перемещениями удлиненного инструмента, отличающийся тем, что устройство линейного перемещения удлиненного инструмента и устройство регулируемого торможения выполнены воедино в виде линейного электромагнитного двигателя, а устройство вращательного движения с устройством регулируемого торможения выполнены в виде электромагнитного двигателя, где удлиненный инструмент выполнен в виде трубчатого инструмента с магнитами внутри и располагается внутри линейного электромагнитного двигателя, осуществляющего регулируемое линейное перемещение трубчатого инструмента, который взаимодействует с ротором электромагнитного двигателя, например, шлицевым соединением, при этом двигатели линейного перемещения и вращательного движений расположены соосно и снабжены блоками управления двигателями, взаимодействующими с блоком сопряжения.
| US 2007063971 A1, 22.03.2007 | |||
| US 8480406 B2, 09.07.2013 | |||
| KR 2013128673 A, 27.11.2013 | |||
| EA 2002001143 A1, 24.04.2003 | |||
| Головка к агрегатам для обработки поверхности кабельных изделий | 1960 |
|
SU139350A1 |

