Изобретение относится к медицинской технике, к устройству, обеспечивающему обратные тактильные ощущения при манипулировании имитатором медицинского инструмента. Механизм может быть использован в медицинских тренажерах эндоскопической хирургии, при моделировании виртуального медицинского вмешательства, где хирург проводит тренировочную хирургическую операцию в моделируемой среде, оперируя имитаторами медицинских инструментов, подобными реальным инструментам.
Известен патент (US 8764448 В2, 01.09.2010 г.) «Robotic device for use in image-guided robot assisted surgical training», «Роботизированное устройство для использования при хирургическом роботоассистированном обучении под визуальным контролем». Роботизированное устройство для использования при хирургическом роботоассистированном обучении под визуальным контролем, роботизированное устройство сочетает в себе структуру ручного интерфейса, предназначенного для имитации управления хирургическим инструментом; поступательный механизм поступательного движения структуры ручного интерфейса; вращательный механизм вращательного движения структуры ручного интерфейса; и сферический механизм, предназначенный для разделения ориентации структуры ручного интерфейса на пространственные координаты, где связи между вращательным механизмом, вращательным механизмом и сферическим механизмом, и структурой ручного интерфейса расположены на противоположных сторонах пересечения поперечной оси и вертикальной оси сферического механизма.
Известен патент (US 7023423 В2, 18.01.1995 г.) «Laparoscopic simulation interface», «Лапароскопический симуляционный интерфейс». Метод и аппарат для обеспечения высокого диапазона рабочих частот и низкочастотного шума механического ввода-вывода компьютерных систем. Шарнирный механизм обеспечивает две вращательные степени свободы для объекта относительно двух осей вращения. Элемент линейной оси связан с шарнирным механизмом в точке пересечения двух осей вращения. Элемент линейной оси может быть перемещен вдоль третьей оси для обеспечения третьей степени свободы. Пользовательский объект связан с элементом линейной оси и, таким образом, может быть перемещен вдоль третей оси, так чтобы объект мог быть перемещен вдоль всех трех степеней свободы. Преобразователи, связанные с обеспечиваемыми степенями свободы, включают в себя датчики и приводы и обеспечивают электромеханический интерфейс между объектом и цифровой системой обработки. Ведущая ось приводит в действие передаваемое усилие механизмов между преобразователями и объектом. Элемент линейной оси может также вращаться относительно его продольной оси для обеспечения четвертой степени свободы и, в некоторых случаях, не закрепленный на оси шарнирный механизм связан с элементом линейной оси для обеспечения пятой и шестой степеней свободы объекта. Датчики преобразователя соединены с четвертой, пятой и шестой степенями свободы. Интерфейс подходит для симуляции медицинских процедур и симуляций, в которых объект, такой как стило или джойстик, движется и управляется пользователем.
Известен «Механизм генерации обратной тактильной связи на инструмент по усилию» взятый нами за прототип (патент на полезную модель RU 139350). Механизм содержит устройства линейного, вращательного и углового перемещений инструмента с датчиками слежения за перемещениями инструмента для обеспечения тактильных ощущений. На коробчатом основании прямоугольного сечения установлен кронштейн, который неподвижно закреплен на вертикальном валу вращения, взаимодействующий гибкой связью с двигателем, установленным внутри основания. А в верхней части кронштейна установлен вал со шкивом, соединенный гибкой связью с двигателем на кронштейне, при этом на боковой поверхности шкива закреплен линейный электромагнитный двигатель с размещенным внутри трубчатым инструментом с магнитами внутри. Недостаток данного механизма заключается в неравномерности усилия генерируемого на имитатор медицинского инструмента, отсутствует возможность удерживания осей свободы механизма в заданном положении, причиной недостатков является использование в механизме коллекторных двигателей, наличие редукторов и переходных механизмов между двигателями и осью свободы.
Техническая задача заключается в создании механизма генерации усилия на имитатор медицинского инструмента, позволяющего генерировать равномерное усилие и удерживать оси свободы механизма в заданном положении, исключение явления неравномерности силового воздействия на имитатор медицинского инструмента в процессе работы.
Решаемая техническая задача в механизме генерации усилия на имитатор медицинского инструмента, содержащий устройства линейного, вращательного и углового перемещений инструмента с датчиками слежения за перемещениями инструмента, где устройство линейного перемещения инструмента выполнено в виде линейного электромагнитного двигателя с размещенным внутри имитатором медицинского инструмента с магнитами внутри достигается тем, что устройства вращательного и углового перемещения инструмента выполнены в виде основания, на котором закреплен статор первого двигателя, к ротору которого прикреплен кронштейн с закрепленным на нем статором второго двигателя, к ротору которого прикреплен линейный электромагнитный двигатель, соединенный с блоком управления двигателями, при этом первый двигатель и второй двигатель являются электромагнитными двигателями с управляемым магнитным полем статора и соединены с блоком управления двигателями.
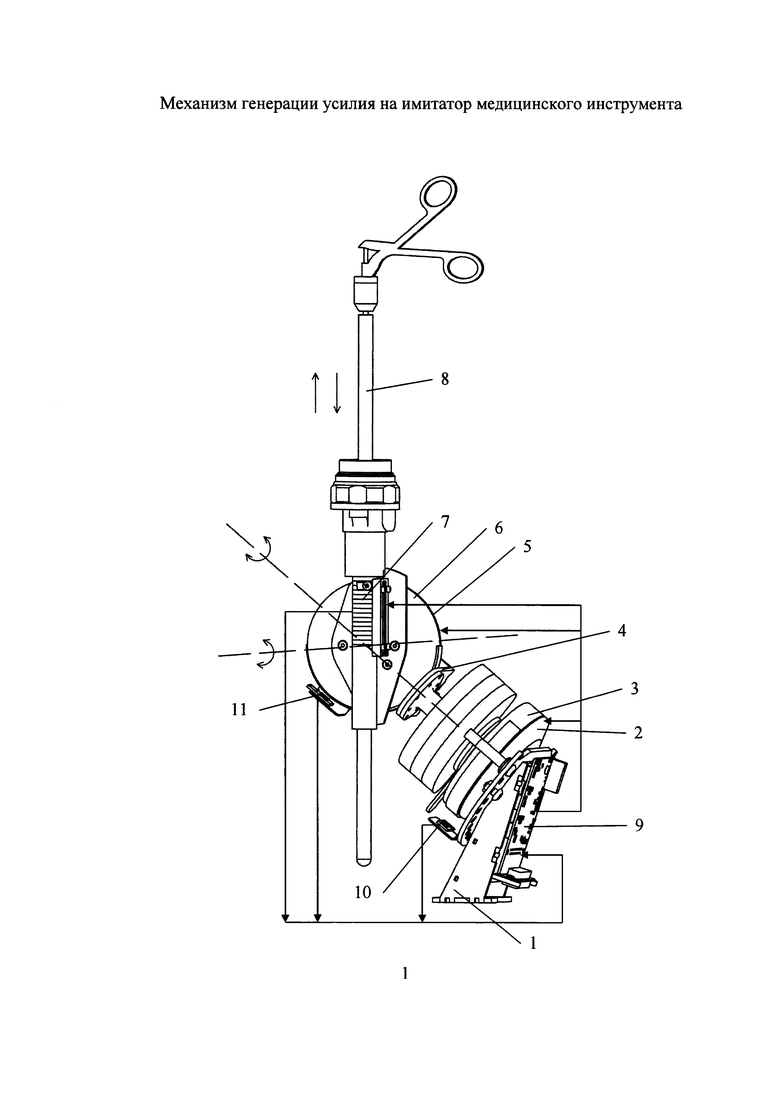
На чертеже представлен общий вид механизма генерации усилия на имитатор медицинского инструмента.
Механизм генерации усилия на имитатор медицинского инструмента содержит основание 1, на котором закреплен статор первого двигателя 2, к ротору 3 которого прикреплен кронштейн 4. На кронштейне 4 закреплен статор второго двигателя 5, к ротору 6 которого прикреплен линейный электромагнитный двигатель 7 с датчиком слежения за инструментом (не показан) и установленным внутри него имитатором медицинского инструмента 8. Блок управления двигателями 9 закреплен на основании 1. Датчики слежения за инструментом 10, 11 установлены на основании 1 и на кронштейне 4 соответственно и соединены с блоком управления двигателями 9. Первый двигатель, второй двигатель и линейный электромагнитный двигатель 7 соединены с блоком управления двигателями 9.
Первый и второй двигатели выполнены в виде двигателей с управляемым магнитным полем статора (вентильный двигатель). В вентильных двигателях токами в обмотках статора управляет микропроцессор, путем управления силовыми ключами (вентилями). Микропроцессор анализирует информацию с датчиков положения ротора и за счет ШИМ сигнала и управления силовыми ключами подает на катушки статора необходимое напряжение, управляя, таким образом, вектором магнитного поля статора так, чтобы поддерживать максимальный вращающий момент ротора. Электронное управление вектором магнитного поля статора позволяет в каждый момент времени поддерживать одинаковое усилие на роторе при его вращении, в отличие от коллекторных двигателей, где происходит механическое переключение катушек статора, в результате чего существует неравномерность усилия на роторе в каждый момент времени. Также управление вектором магнитного поля статора позволяет удерживать оси свободы механизма в заданном положении, при этом задается постоянное направление вектора магнитного поля статора, ротор поворачивается в соответствии с заданным вектором магнитного поля статора и остается в этом положении, что невозможно в коллекторных двигателях.
Описание работы и управления вентильных двигателей опубликовано в следующих источниках: Герман-Галкин С.Г. Глава 9. Модельное проектирование синхронных мехатронных систем // Matlab & Simulink. Проектирование мехатронных систем на ПК. - СПб.: КОРОНА-Век, 2008. - 368 с - ISBN 978-5-903383-39-9; Борцов Ю.А., Соколовский Г.Г. Глава 8. Адаптивно-модальное управление в следящих системах с бесконтактными моментными двигателями // Автоматизированный электропривод с упругими связями. - 2-е изд., перераб. и доп. - СПб: Энергоатомиздат, 1992. - 288 с - ISBN 5-283-04544-7; Соколовский Г.Г. Электроприводы переменного тока с частотным регулированием. - М.: "Академия", 2006. - 272 с-ISBN 5-7695-2306-9. Микеров А.Г. Управляемые вентильные двигатели малой мощности: Учебное пособие. - СПб: СПбГЭТУ, 1997. - 64 с.
Первый и второй двигатели выполнены в виде бесколлекторного синхронного трехфазного двигателя, который является двигателем с управляемым магнитным полем статора, модель iPower GBM8108-90T компании iFlight-RC Ltd (http://www.iflight-rc.com). Датчики слежения за инструментом 10, 11 выполнены на основе линейного энкодера модель AS5311 компании AMS AG (http://www.ams.com). Блок управления двигателями 9 выполнен на основе микропроцессора.
Рассмотрим в работе механизм генерации усилия на имитатор медицинского инструмента.
Во время работы обучаемый совершает манипуляции имитатором медицинского инструмента 8, установленным в механизме, осуществляя тренировочную хирургическую операцию в виртуальной среде, моделируемой, например, ЭВМ (не показано), при этом положение имитатора медицинского инструмента 8 синхронизировано с положением виртуального инструмента. Имитатор медицинского инструмента 8 установлен в механизме, его положение отслеживается в трех координатах датчиками слежения за инструментом 10, 11 и датчиком слежения за инструментом (не показан) в линейном электромагнитном двигателе 7 и используется для построения виртуальной картины операции. При отключенных двигателях имитатор медицинского инструмента 8 свободно перемещается в трех координатах, за счет свободного вращения ротора первого двигателя 3, ротора второго двигателя 6 и линейного перемещения в линейном электромагнитном двигателе 7 происходит только отслеживание положения имитатора медицинского инструмента 8.
При взаимодействии виртуального медицинского инструмента с объектом в моделируемой среде (с виртуальным органом, другим инструментом или др.) ЭВМ (не показано) подает на блок управления двигателями 9 сигнал о направлении и величине усилия, блок управления двигателями 9 подает управляющее напряжение на статор первого двигателя 2, статор второго двигателя 5 или линейный электромагнитный двигатель 7, при этом на имитаторе медицинского инструмента 8 возникает усилие, препятствующее перемещению инструмента. При подаче управляющего напряжения на статор первого двигателя 2, основание 1 и статор первого двигателя 2 остаются неподвижными, а ротор первого двигателя 3 начинает совершать вращательное движение совместно с кронштейном 4, вторым двигателем и линейным электромагнитным двигателем 7, имитируя, таким образом, усилие на имитаторе медицинского инструмента 8. При подаче управляющего напряжения на статор второго двигателя 5 ротор второго двигателя 6 начинает совершать вращательное движение совместно линейным электромагнитным двигателем 7, имитируя, таким образом, усилие на имитаторе медицинского инструмента 8. При подаче управляющего напряжения на линейный электромагнитный двигатель 7 имитатор медицинского инструмента 8 с магнитами внутри начинает совершать поступательное движение вдоль оси линейного электромагнитного двигателя 7, имитируя, таким образом, усилие на имитаторе медицинского инструмента 8. За счет того что первый и второй двигатели это двигатели с управляемым магнитным полем статора, а также отсутствие переходных механизмов между двигателем и осью вращения (шестеренок или гибкой связи), усилие, которое они создают на имитаторе медицинского инструмента 8, будет равномерным.
Рассмотрим алгоритм работы блока управления двигателями 9. Проводят калибровку первого и второго двигателей, для этого подавая управляющее напряжение на статор первого 2 и статор второго 5 двигателя с дискретным шагом поворачивают вектор магнитного поля статора каждого двигателя вслед за которым поворачивается ротор соответствующего двигателя, в процессе поворота регистрируют значения с датчиков слежения за инструментом 10 и 11 для первого и второго двигателя соответственно, в результате для каждого двигателя формируется массив соответствия значений «положения магнитного поля статора» с «положением ротора». Массив соответствия значений «положения магнитного поля статора» с «положением ротора» позволяет осуществить точное управление двигателем и в любой момент времени создать на роторе двигателя необходимое направление и величину усилия. Блок управления двигателями 9 получает информацию о положении ротора первого 3 и второго 6 двигателя с датчиков слежения за инструментом 10 и 11, используя массив соответствия значений «положения магнитного поля статора» с «положением ротора» подает управляющее напряжение на статор первого 2 или статор второго 5 двигателя, таким образом, чтобы на роторе первого 3 или роторе второго 6 двигателя соответственно возник момент вращения, для создания усилия на имитаторе медицинского инструмента 8. Блок управления двигателями 9 получает информацию с датчика слежения (не показан) в линейном электромагнитном двигателе 7 о положении имитатора медицинского инструмента 8 внутри линейного электромагнитного двигателя 7. Блок управления двигателями 9 подает управляющее напряжение на линейный электромагнитный двигатель 7, катушки внутри двигателя генерируют магнитное поле, которое взаимодействует с магнитами внутри имитатора медицинского инструмента 8, создавая, таким образом, усилие на имитаторе медицинского инструмента 8.
Удержание осей свободы механизма в заданном положении осуществляется следующим образом. Блок управления двигателями 9 получает информацию о положении ротора первого 3 и ротора второго 6 двигателей с датчиков слежения за инструментом 10 и 11 соответственно, используя массив соответствия значений «положения магнитного поля статора» с «положением ротора» блок управления двигателями 9 подает управляющее напряжение на катушки статора первого 2 или статора второго 5 двигателя, таким образом, чтобы положение магнитного поля статора соответствовало текущему положению ротора, фиксируя при этом положение магнитного поля статора, в результате на роторе двигателя в данный момент времени не возникает вращающий момент, он возникает при попытке повернуть ротор в одну или другую сторону от заданного положения при манипуляции имитатором медицинского инструмента 8. При сильном отклонении ротора первого 3 или ротора второго 6 двигателя от заданного положения блок управления двигателями 9 подает управляющее напряжение на статор двигателя, стремясь повернуть ротор до заданного положения. Для удержания имитатора медицинского инструмента 8 внутри линейного электромагнитного двигателя 7 блок управления двигателями 9 фиксирует информацию с датчика слежения за инструментом (не показан) о положении имитатора медицинского инструмента 8 и при его смещении относительно зафиксированного положения подает управляющее напряжение на линейный электромагнитный двигатель 7 так, чтобы вернуть имитатор медицинского инструмента 8 в заданное положение. Удержание осей свободы механизма в заданном положении позволяет имитировать усилие на имитаторе медицинского инструмента 8, возникающее при захвате медицинским инструментом какого-либо объекта в виртуальной среде, что невозможно сделать при использовании коллекторных двигателей.
Механизм генерации усилия на имитатор медицинского инструмента содержит двигатели с управляемым магнитным полем статора, точное управление которым позволяет генерировать равномерное усилие на имитатор медицинского инструмента и удерживать оси свободы механизма в заданном положении.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД ДЛЯ ГЕНЕРАЦИИ ОБРАТНОЙ ТАКТИЛЬНОЙ СВЯЗИ НА ИНСТРУМЕНТ ПО УСИЛИЮ | 2013 |
|
RU2546406C1 |
| Имитатор вентрикулоскопа | 2017 |
|
RU2679110C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ИНОРОДНОГО ТЕЛА ВНУТРИ ПАЦИЕНТА ВНЕШНИМ МАГНИТНЫМ ПОЛЕМ | 2017 |
|
RU2667880C1 |
| УСТРОЙСТВО РЕНТГЕНОВСКОЙ ВИЗУАЛИЗАЦИИ | 2017 |
|
RU2736213C2 |
| КОНТРОЛЛЕР КИСТИ ДЛЯ ИСПОЛЬЗОВАНИЯ В КОНТРОЛЛЕРЕ ОПЕРАТОРА РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2716353C1 |
| ТРЕНАЖЕР ХИРУРГИЧЕСКОЙ ОПЕРАЦИОННОЙ | 2014 |
|
RU2546404C1 |
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| УСТРОЙСТВО ДЛЯ СООБЩЕНИЯ ДВИЖЕНИЯ | 1998 |
|
RU2244961C2 |
| МЕДИЦИНСКАЯ РОБОТИЗИРОВАННАЯ СИСТЕМА | 2007 |
|
RU2412799C2 |
Изобретение относится к медицинской технике, к устройству, обеспечивающему обратные тактильные ощущения при манипулировании имитатором медицинского инструмента, и может быть использовано в медицинских тренажерах эндоскопической хирургии, при моделировании виртуального медицинского вмешательства, где хирург, проводит тренировочную хирургическую операцию в моделируемой среде, оперируя имитаторами медицинских инструментов, подобными реальным инструментам. Механизм генерации усилия на имитатор медицинского инструмента содержит устройства линейного, вращательного и углового перемещений инструмента с датчиками слежения за перемещениями инструмента. Устройство линейного перемещения инструмента выполнено в виде линейного электромагнитного двигателя с размещенным внутри имитатором медицинского инструмента с магнитами внутри. Устройства вращательного и углового перемещения инструмента выполнены в виде основания, на котором закреплен статор первого двигателя, к ротору которого прикреплен кронштейн с закрепленным на нем статором второго двигателя, к ротору которого прикреплен линейный электромагнитный двигатель, соединенный с блоком управления двигателями. Первый двигатель и второй двигатель являются электромагнитными двигателями с управляемым магнитным полем статора и соединены с блоком управления двигателями. Изобретение позволяет генерировать равномерное усилие и удерживать оси свободы механизма в заданном положении, исключает явления неравномерности силового воздействия на имитатор медицинского инструмента в процессе работы. 1 ил.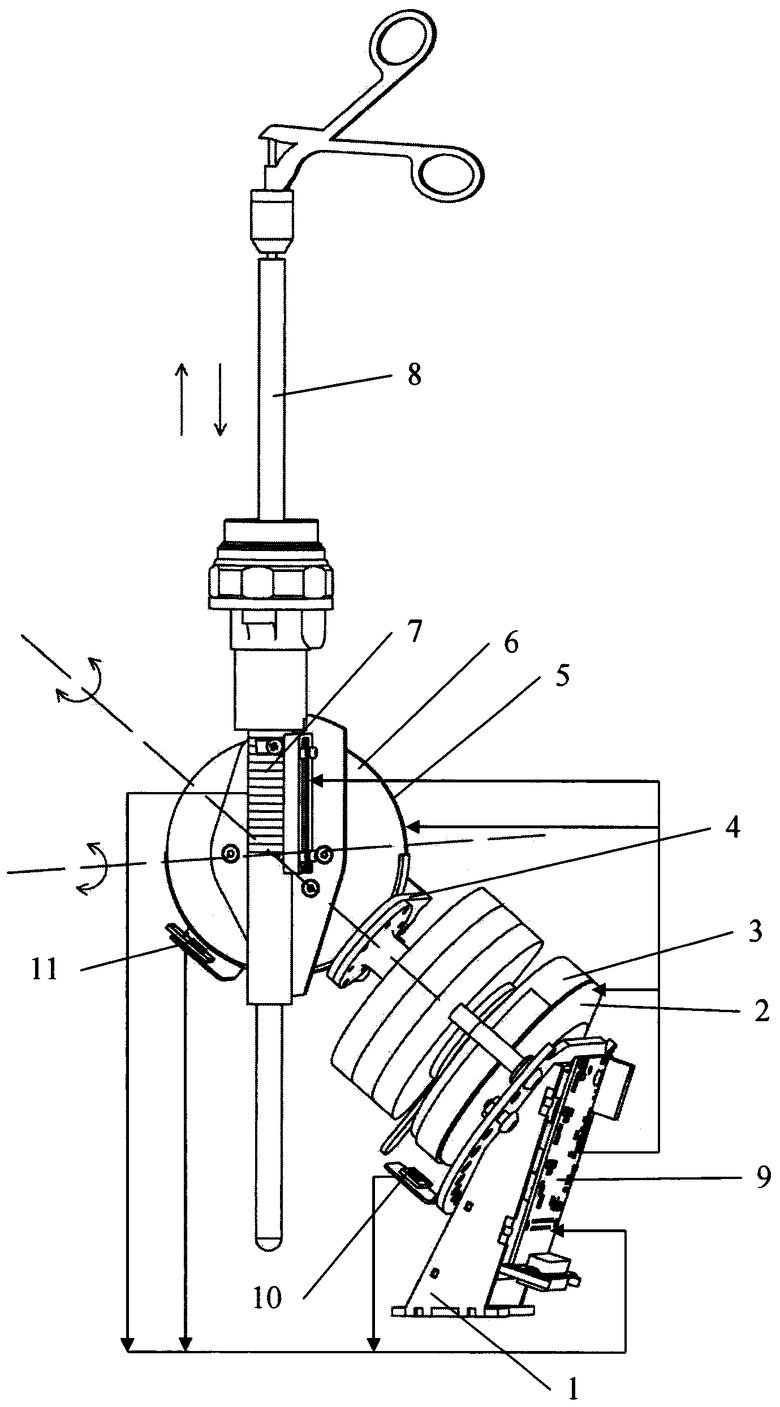
Механизм генерации усилия на имитатор медицинского инструмента, содержащий устройства линейного, вращательного и углового перемещений инструмента с датчиками слежения за перемещениями инструмента, где устройство линейного перемещения инструмента выполнено в виде линейного электромагнитного двигателя с размещенным внутри имитатором медицинского инструмента с магнитами внутри, отличающийся тем, что устройства вращательного и углового перемещения инструмента выполнены в виде основания, на котором закреплен статор первого двигателя, к ротору которого прикреплен кронштейн с закрепленным на нем статором второго двигателя, к ротору которого прикреплен линейный электромагнитный двигатель, соединенный с блоком управления двигателями, при этом первый двигатель и второй двигатель являются электромагнитными двигателями с управляемым магнитным полем статора и соединены с блоком управления двигателями.
| Головка к агрегатам для обработки поверхности кабельных изделий | 1960 |
|
SU139350A1 |
| Позиционный преобразователь угла поворота вала в код | 1959 |
|
SU128762A1 |
| US 2013224710 A1, 29.08.2013 | |||
| US 7023423 B2, 18.01.1995. | |||

