ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к медицинской технике, в целом к медицинской системе для дистанционного беспроводного управления движением инородного тела, расположенного внутри пациента, а конкретнее к магнитной системе управления перемещением в пространстве и угловой ориентацией объекта, находящегося в теле человека, посредством внешнего магнитного поля.
УРОВЕНЬ ТЕХНИКИ
Так как любое намагниченное тело или магнитная неоднородность может рассматриваться как магнитный диполь или их совокупность и испытывать силовое воздействие за счет приложенного внешнего магнитного поля, то имеет важное практическое значение возможность использования магнитных полей в качестве инструмента для управления перемещением и ориентацией указанных объектов, в частности, для медицинских применений.
В организм человека преднамеренно вводятся инородные тела, имеющие намагниченность, для выполнения различных задач. Управление ими с помощью внешнего магнитного поля позволяет безболезненно для пациента проводить различные диагностические и/или терапевтические процедуры.
Известны технические решения для создания управляемых магнитным полем эндоскопических капсул, когда магнитное управление осуществляется с помощью внешнего магнитного поля, создаваемого как электромагнитами, так и системами на основе постоянных магнитов. Например, подобные комплексы для проведения полностью управляемого капсульного эндоскопического обследования раскрыты в US 20070221233 А1, опубл. 27.09.2007, US 20100268026 А1, опубл. 21.10.2010, US 20110054255 А1, опубл. 03.03.2011, US 20110184235 А1, опубл. 28.07.2011.
Основными недостатками существующих систем являются невозможность манипулировать эндоскопической капсулой в ЖКТ с 6 степенями свободы, включая перемещение по всему желудочно-кишечному тракту, значительные габариты и масса установки.
Известна конфигурация магнитной системы управления с использованием одного постоянного магнита, позволяющая переориентировать капсулу в желудке (Arthur W Mahoney and Jake J Abbott: 5-DOF Manipulation of a Magnetic Capsule in Fluid using a Single Permanent Magnet: Proof-of- Concept for Stomach Endoscopy. In Hamlyn Symp. Med. Robot., pages 114-115, 2013).
В известном решении применяется роботизированная «рука» - манипулятор, перемещающая один магнит. Как линейные перемещения, так и вращение магнита реализуются за счет вращений в суставах «руки». Использование одного магнита позволяет управлять ориентацией магнита эндоскопической капсулы, однако магнитная сила всегда направлена в сторону магнита манипулятора. Более того, присутствуют «мертвые зоны» и неудобные направления в рабочем пространстве.
Наиболее близким аналогом заявляемого изобретения является манипулятор эндоскопической магнитоуправляемой капсулы (KR 100540758 В1, опубл. 10.01.2006), позволяющий перемещать и останавливать эндоскопическую капсулу в теле пациента. Манипулятор имеет 5 степеней свободы, две вращательные из которых реализуются за счет двух узлов поворота, а три линейные (поперечное, продольное и вертикальное направление) - за счет узлов линейных перемещений. Устройство имеет два постоянных магнита, каждый из которых закреплен в струбцине по обе стороны от пациента, выполненной с возможностью поворота и перемещения в вертикальной и продольной плоскостях. Струбцина закреплена на рейке, установленной на вертикальной станине, при этом линейное перемещение постоянного магнита в поперечной плоскости происходит за счет перемещения станины вдоль основания.
Недостатками известного манипулятора является то, что расстояние между эндоскопической капсулой и внешним постоянным магнитом управляется вручную, поэтому возникает риск из-за ошибки оператора повредить стенки организма, когда капсула и магнит находятся на небольшом расстоянии друг от друга. Кроме того, использование двух магнитов, расположенных с противоположных сторон от пациента, не позволяет создать все возможные конфигурации поля, необходимые для эффективного управления капсулой. Несмотря на низкую стоимость и интуитивность этого подхода, данный манипулятор обладает низкой точностью и плохой воспроизводимостью.
Задачей, стоящей в данной области медицинской техники, на решение которой направлено предлагаемое техническое решение, является устранение указанных недостатков.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Технические проблемы, решаемые созданием изобретения, состоят в том, что существующие магнитные системы, осуществляющие управление движением инородного объекта с намагниченностью в теле пациента, обладают недостаточной точностью движения инструмента и манипуляционными возможностями в ограниченном пространстве, в связи с чем возникают «мертвые зоны» и невозможно создание в любой точке рабочего пространства системы любой наперед заданной конфигурации магнитного поля, включая величину и направление поля, значения всех компонентов градиента магнитного поля.
Технический результат, обеспечиваемый изобретением, заключается в повышении эффективности позиционирования объекта, обладающего намагниченностью, за счет реализуемости всех возможных направлений магнитной силы при произвольной ориентации объекта с достаточно большими по величине магнитными силами.
Технический результат достигается за счет того, что устройство управления движением объекта, имеющего намагниченность и находящегося внутри тела пациента, содержит по меньшей мере четыре источника постоянного магнитного поля, расположенных в области пространства, окружающей тело пациента, при этом каждый из источников обладает пятью степенями свободы и выполнен с возможностью автоматизированного управления его пространственным положением и угловой ориентацией с использованием обратной связи и учетом положения и ориентации объекта внутри пациента.
В различных вариантах воплощения изобретения в качестве объекта может быть использован(а) эндоскопическая капсула, медицинский микроробот, лекарственный раствор с магнитными наночастицами, микро или наноиглы, сенсор или стимулятор.
Кроме того, источник постоянного магнитного поля может быть выполнен в виде по меньшей мере одного постоянного магнита.
Кроме того, источник постоянного магнитного поля может быть выполнен в виде электромагнита или электромагнита с сердечником.
Кроме того, источник постоянного магнитного поля выполнен в виде системы, включающей электромагнит и по меньшей мере один постоянный магнит.
Устройство может быть выполнено таким образом, что каждый источник постоянного магнитного поля установлен в манипуляторе, закрепленном на едином общем основании. При этом конфигурация манипулятора может быть выполнена на основе пространственного механизма параллельной структуры.
В одном из вариантов воплощения изобретения манипулятор может быть выполнен в виде манипулятора-трипода, который состоит из трех линейных приводов и обеспечивает три степени свободы для управляемого координатного перемещения привода вращения, который установлен в конечной точке линейных приводов, при этом привод вращения скомпонован для закрепления источника постоянного магнитного поля и обеспечивает две угловые степени свободы для управляемой настройки углов поворота источника постоянного магнитного поля.
В одном из вариантов воплощения по меньшей мере четыре манипулятора-трипода установлены на едином общем основании попарно симметрично друг относительно друга.
Наличие по меньшей мере четырех источников постоянного магнитного поля с пятью степенями свободы каждый с возможностью работать попарно и сверху, и снизу от пациента (в случае если пациент находится в горизонтальном положении) при произвольных взаимных положениях и ориентациях обеспечивает возможность создания всех возможных конфигураций магнитного поля и возможность независимого задания направления и величины силы, действующей на объект, и направления поля, задающего угловую ориентацию объекта.
Использование, например, с каждой противоположной стороны пациента двух и более источников магнитного поля на основе постоянных магнитов, в том числе, с 5 степенями свободы каждый, закрепленных в механической конструкции, обеспечивает возможность создания силы, направленной вдоль оси вдоль тела пациента, чего в принципе нельзя добиться с помощью одного источника магнитного поля.
Использование обратной связи для перемещения источников постоянного магнитного поля с учетом положения и ориентации объекта, определяемой с помощью одной из известных методик отслеживания положения объекта и его ориентации в режиме реального времени, позволят увеличить точность управления и позиционирования объектом заявляемым устройством (манипулятором).
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Прилагаемые чертежи, которые включены в состав настоящего описания и являются его частью, иллюстрируют варианты осуществления изобретения и совместно с вышеприведенным общим описанием изобретения и нижеприведенным подробным описанием вариантов осуществления служат для пояснения принципов настоящего изобретения. На чертежах одинаковые позиции применяются для обозначения одинаковых частей.
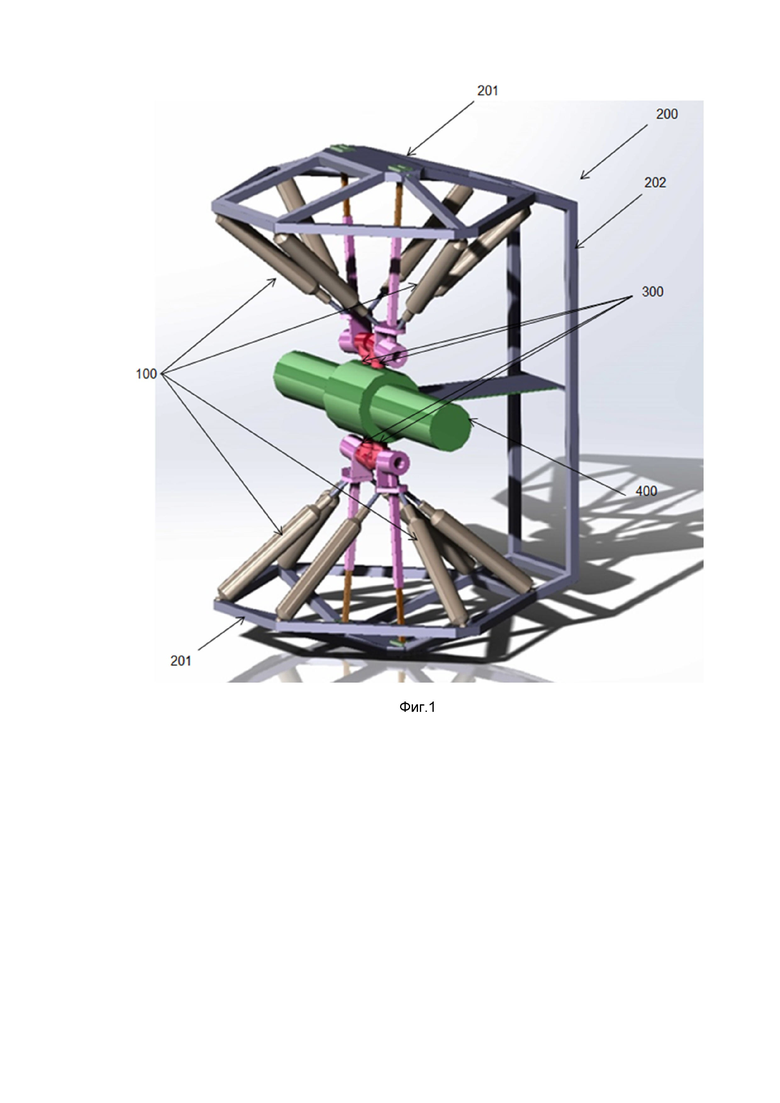
На фиг. 1 представлен общий вид устройства с рабочей зоной, в качестве которой схематически принята область в виде цилиндра, с неподвижным основанием в одном из вариантов осуществления.
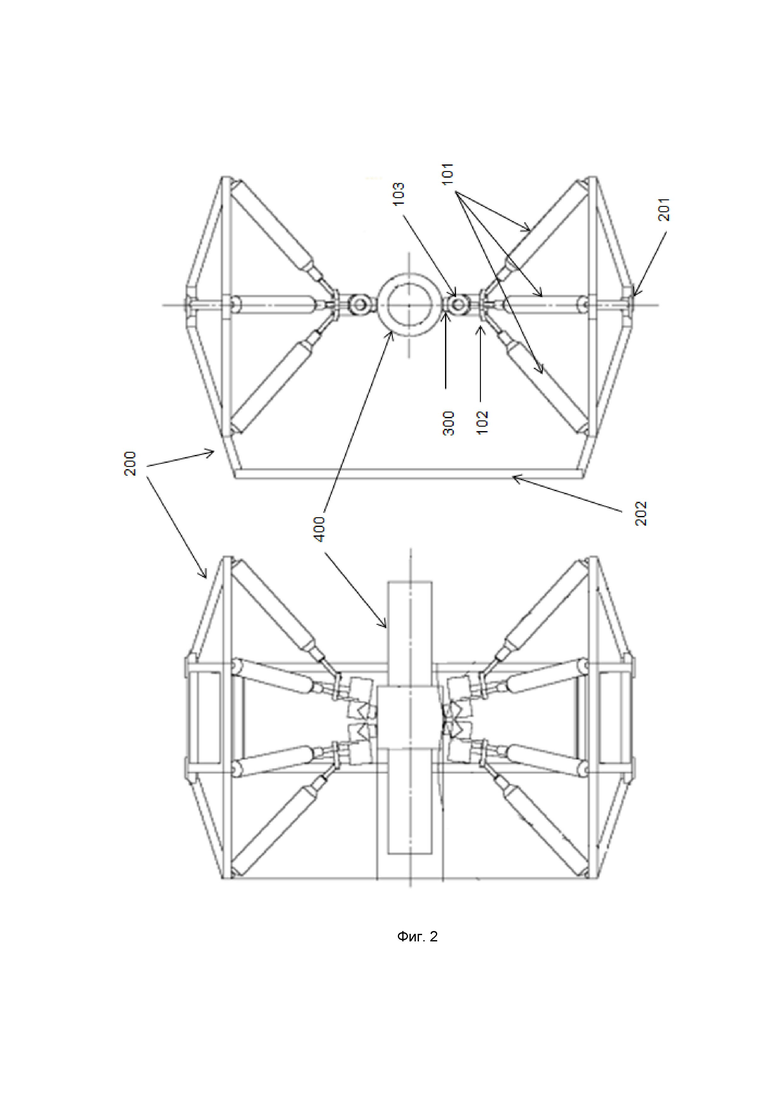
На фиг. 2 изображен эскиз заявляемого устройства, вид спереди и вид сзади.
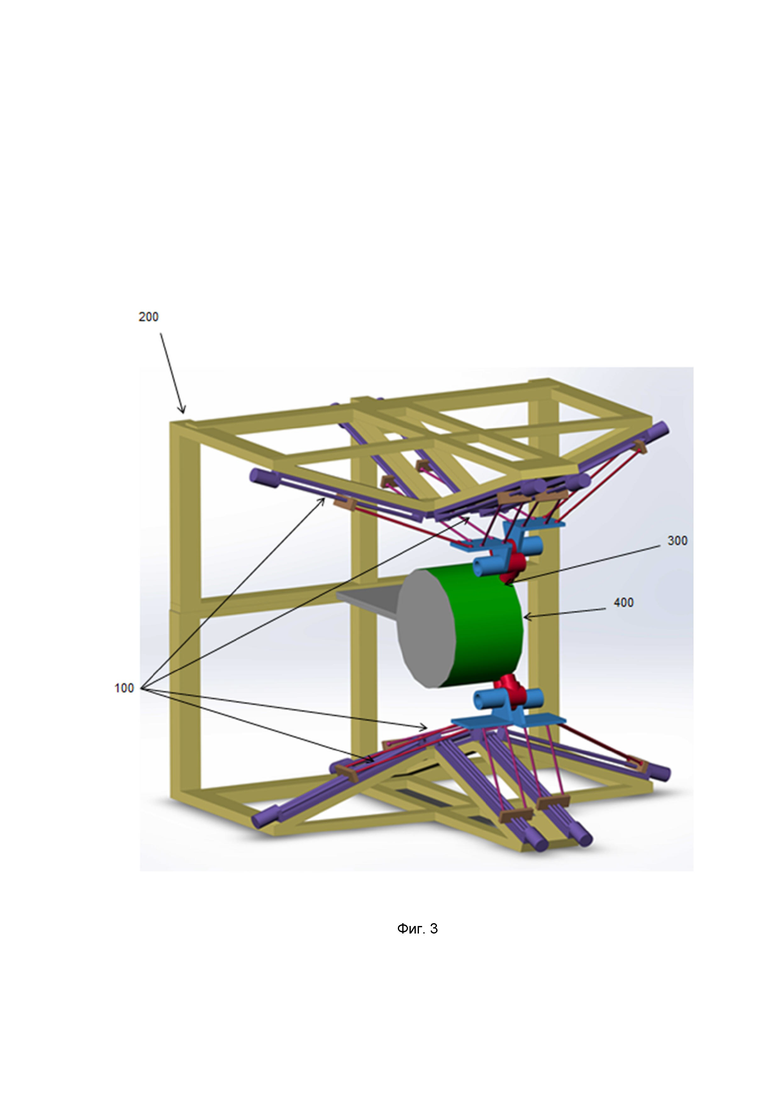
На фиг. 3 представлен общий вид устройства с рабочей зоной, в качестве которой схематически принята область в виде цилиндра, с неподвижным основанием в одном из вариантов осуществления.
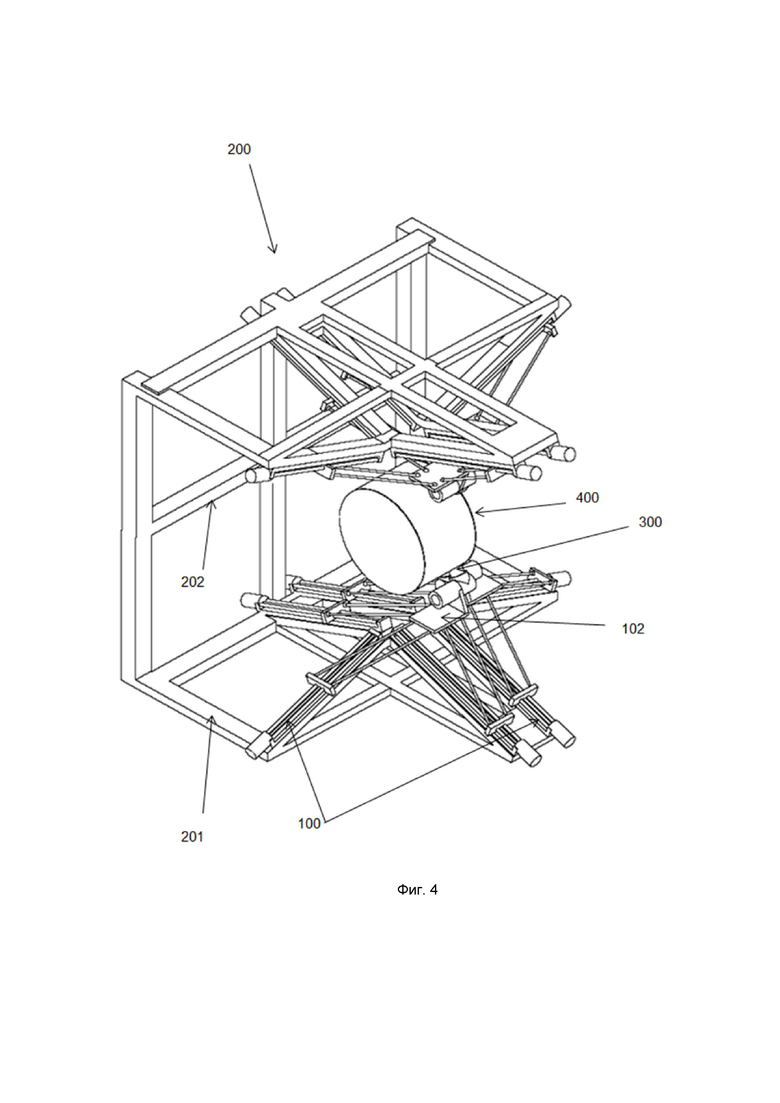
На фиг. 4 изображен эскиз заявляемого устройства.
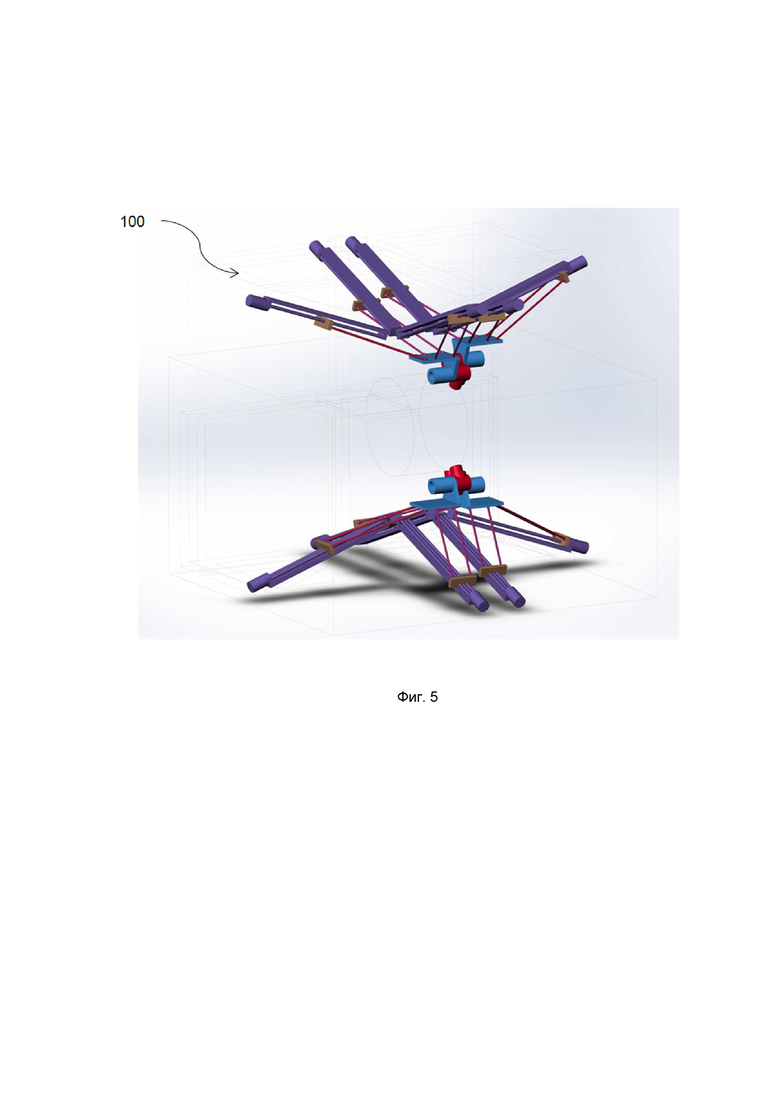
На фиг. 5 изображен внешний вид механизмов перемещения источников магнитного поля.
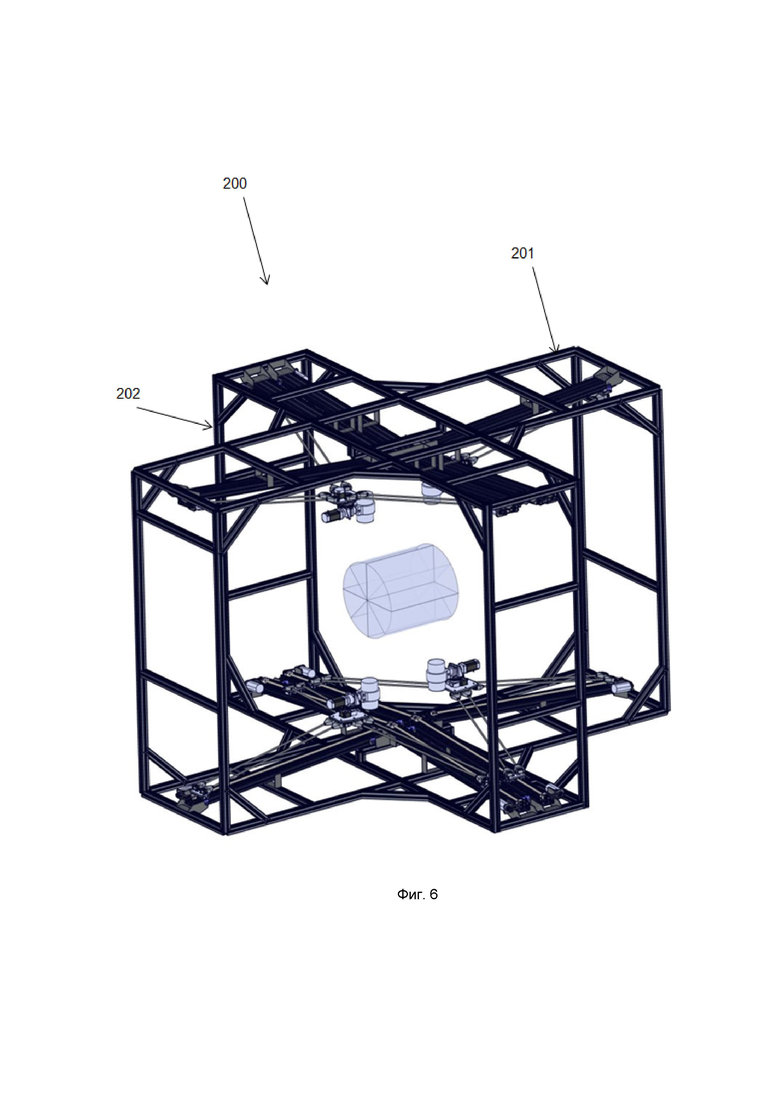
На фиг. 6 представлен общий вид устройства с рабочей зоной, в качестве которой схематически принята область в виде цилиндра, с неподвижным основанием в одном из вариантов осуществления.
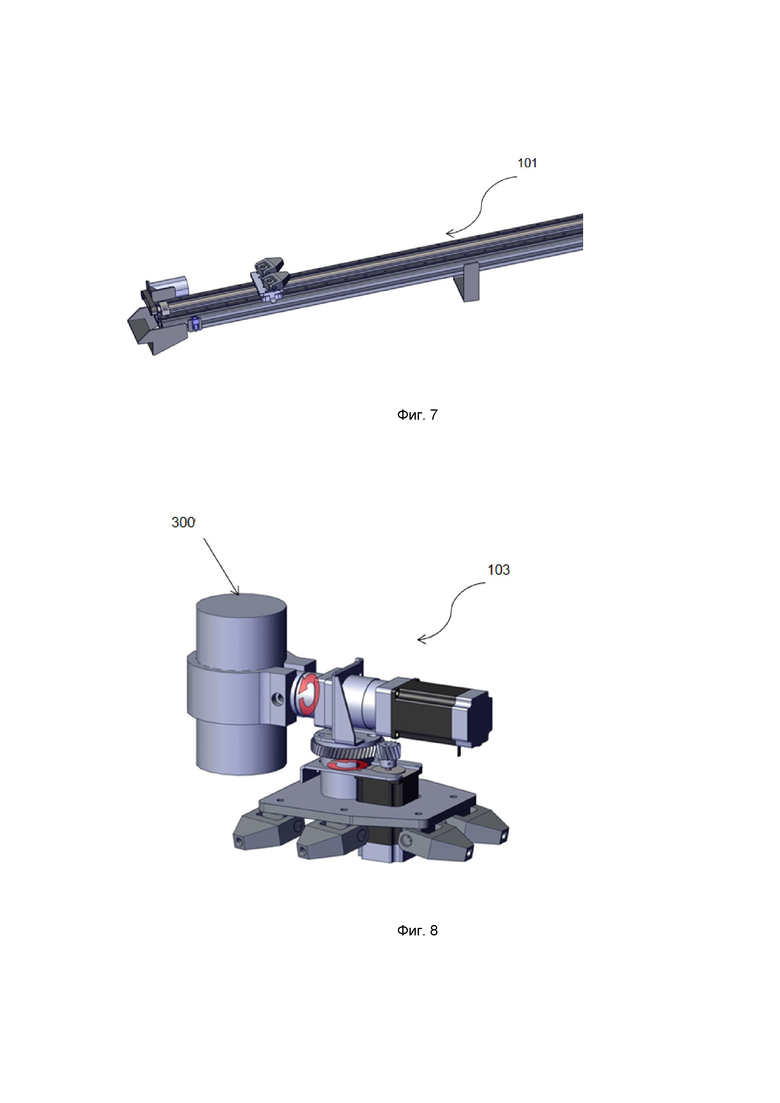
На фиг. 7 изображен механизм линейного перемещения с кронштейнами.
На фиг. 8 изображен механизм вращения источника магнитного поля.
ОПРЕДЕЛЕНИЯ (ТЕРМИНЫ)
Термин «объект, имеющий намагниченность и находящий внутри тела пациента», в указанной заявке включает любой инородный объект, преднамеренно вводимый в пациента для различных целей, выполненный с возможностью управления внешним постоянным магнитным полем согласно изобретению. Неограничивающие примеры объекта включают эндоскопическую капсулу для диагностики пищевого тракта, медицинский микроробот, лекарственный раствор с магнитными наночастицами, используемыми для адресной доставки к нужной точке организма, для лечения различных заболеваний, микро или наноиглы, сенсор или стимулятор и другие.
Магнитные наночастицы, используемые в терапевтических целях, могут состоять, например, из ферромагнитных, ферримагнитных или суперпарамагнитных материалов, в частности, на основе оксидов железа со структурой шпинели (магнетит, маггемит). Магнитные наночастицы могут применяться для точечной доставки лекарственного препарата при использовании градиента магнитного поля, фокусирующего и притягивающего магнитные наночастицы к нужной точке организма человека.
Медицинские микророботы, функционирующие под управлением внешнего магнитного поля, способны выполнять ряд достаточно сложных работ, включая доставку лекарственных препаратов к месту назначения, проведение микрохирургических операций и выполнение других манипуляций с отдельными клетками организма.
Микро или наноиглы или другие хирургические инструменты по типу лапороскопии, используемые хирургом на микроуровне, могут быть использованы в качестве «объекта» для реализации функции управления движения ими посредством внешнего постоянного магнитного поля.
Сенсоры или стимуляторы, используемые для диагностических и/или терапевтических целях, обладающие намагниченностью, могут быть использованы в качестве «объекта» для реализации функции управления движения ими посредством внешнего постоянного магнитного поля.
Под признаком «постоянный магнит» в настоящем документе понимают постоянные магниты, выполненные из материалов, обладающих магнитными свойствами, на основе металлов, входящих в группу лантаноидов: Gd, Tb, Dy, Но, Er, Sm, Eu и других, обычно называемых редкоземельными. Предпочтительно использование неодимовых магнитов NdFeB и самарий-кобальт SmCo5, Sm2Co17, как наиболее высоко энергетичных.
Используемый в документе термин «пациент» охватывает все виды млекопитающих, предпочтительно человека.
Объект данного изобретения в зависимости от его функционального назначения и выполнения может быть введен в организм пациента перорально, ректально, парентерально, через небольшие (обычно 0,5-1,5 см) отверстия в теле пациента.
Под «областью пространства, окружающей тело пациента» в данной заявке понимают область, размеры которой ограничены масштабом силы источников постоянного магнитного поля для создания требуемой конфигурации магнитного поля в заданной точке.
В качестве «рабочей области» в данной заявке схематически принята область в виде цилиндра диаметром примерно 500 мм.
Под «эффективным управлением объекта» в данной заявке понимают управление, при котором существует возможность, во-первых, создания силы от нуля до определенной величины (это зависит от конкретного применения, но для примера можно говорить о силе порядка веса объекта) в произвольном направлении, и во-вторых, возможность независимо от направления силы произвольно ориентировать направление силовых линий поля, что задает угловую ориентацию объекта. При этом масштаб силы определяется размером источников постоянной магнитного поля в системе, а произвольность направления силы и произвольность направления поля - количеством источников постоянного магнитного поля и возможностью их согласованно перемещать.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
В общем, настоящее изобретение предлагает устройство для генерации магнитного поля, вектор которого имеет произвольные контролируемые величину и направление в заранее заданной области пространства, и может быть использовано, в частности, для управления объектом, имеющим намагниченность, в том числе, для изменения его пространственного положения и угловой ориентации.
Управление движением объекта осуществляется внешним магнитным полем, которое создается по меньшей мере четырьмя источниками постоянного магнитного поля, обладающими пятью степенями свободы и расположенных в области пространства, окружающей тело пациента.
Для реализации устройства управления движением объекта, имеющим намагниченность и находящимся внутри тела пациента и имитации его работы, была разработана структурная схема макета (фиг. 1, 2, 6). Схема содержит исследуемый объект (на фигурах условно показана рабочая область 400 в виде цилиндра, в которой находится объект), источники постоянного магнитного поля 300, установленные в по меньшей мере четырех манипуляторах 100, закрепленных на едином общем основании 200 симметрично друг относительно друга, а также не показанные на фигурах датчики для определения положения и ориентации объекта, блок предварительной обработки сигналов с датчиков и процессорное устройство, выполненное с возможностью управления перемещением в пространстве и угловой ориентацией объекта за счет изменения положения источников постоянного магнитного поля 300 путем подачи управляющих сигналов для манипуляторов 100, генерации траектории движения объекта, определения показания датчиков на каждом шаге траектории (прямая задача магнитной локации) и по этим показаниям вычисления теоретического положения и ориентации объекта (обратная задача).
В качестве манипуляторов 100 предпочтительно использовать манипуляторы, выполненные на основе пространственного механизма параллельной структуры, более предпочтительно манипуляторы-триподы.
Кинематическая схема механической конструкции для закрепления источников постоянного магнитного поля обеспечивает значительную жесткость, и, следовательно, точность перемещений при условии большой массы источника и значительных сил взаимодействия между близко расположенными источниками магнитного поля. Конструкция позволяет исключить неконтролируемое сближение источников магнитного поля со «схлопыванием» магнитной системы и непроизвольного нанесения вреда пациенту (защемления отдельных участков тела). Одновременно кинематическая схема обеспечивает большой диапазон перемещений по каждой степени свободы каждого источника магнитного поля.
Конструкция устройства управления объектом упрощает доступ пациента (врача) в рабочую область за счет возможности удобного помещения пациента в систему сбоку (исключения психологического дискомфорта при обследовании и лучший визуальный доступ врача к обследуемой области.
На фиг. 1, 2, 6 представлены варианты воплощения механической конструкции согласно изобретению, которые различаются как геометрией неподвижного основания 200, так и механизмом манипулятора-трипода 100.
Механизм манипулятора-трипода 100 имеет 5 степеней свободы.
Манипулятор-трипод 100 (фиг. 2) представляет собой три звена 101 переменной длины, одни концы которых закрепляются на опорной раме 201 неподвижного основания 200, а другие концы связаны между собой в конечной точке площадкой выходного звена 102. Таким образом, образуется подвижная структура, позволяющая осуществлять линейные перемещения в пространстве источника магнитного поля 300, который монтируется в указанную конструкцию. Для обеспечения поворота на площадку выходного звена 102 закрепляется механизм поворота источником магнитного поля 103.
Фактически, манипулятор 100 построен в виде пирамиды, ребрами которой являются три электромеханических привода (актуатора), обеспечивающие три степени свободы, соответствующие пространственным координатам, в конечной точке которых установлены два электромеханических привода вращения относительно взаимно перпендикулярных осей, обеспечивающие две вращательные степени свободы.
В качестве электромеханических приводов могут применяться любые приводы на основе синхронной или асинхронной электромашины с аксиальным или радиальным магнитным потоком.
На фиг. 1 показан один из вариантов реализации манипулятора-трипода 100, в котором используется линейный привод с зубчатым ремнем с кареткой. Каждый из трех приводов приводится в движение синхронным сервоприводом (не показан). К кареткам линейных приводов крепятся тяги, например, углепластиковые, на сферических шарнирах. С противоположной стороны тяги соединяются с площадкой выходного звена.
Также одним из вариантов выполнения манипулятора - трипода 100 (на фиг. 3) является использование шагового двигателя.
Механизм линейного перемещения (фиг. 7) состоит из двух рельсов и двух кареток, одного винта с гайкой, установленного на подшипниковых опорах. Шаговый двигатель соединен с винтом посредством шкивов и зубчатого ремня. В качестве основания может быть применен алюминиевый профиль. В крайних положениях каретки применены бесконтактные концевые выключатели.
Управляя взаимосвязано всеми тремя приводами по определенному закону, возможно осуществлять перемещения выходной площадки 102 в пространстве. Жесткая конструкция позволяют добиваться высокой точности перемещений, а также оптимально распределять усилия.
Для осуществления поворота источника магнитного поля 300 в рабочем диапазоне углов ±360° на выходном звене манипулятора-трипода предусмотрена функция четвертого и пятого приводов (поворотных). Приводы обеспечивают две угловые степени свободы источника магнитного поля, а также высокую динамику и точность поворота.
Основание одного поворотных приводов жестко закреплено на площадке выходного звена. На поворотном траверсе данного привода закреплен второй привод вращения источника магнитного поля относительно оси симметрии источника.
Механизм вращения источника магнитного поля в одном из вариантов выполнения (фиг. 8) состоит из шаговых двигателей, редуктора и зубчатой передачи (может быть применена вместо второго редуктора, для уменьшения габаритов узла). Дополнительно для разгрузки валов редуктора и двигателя могут быть установлены подшипники.
Используя эти две вращательные степени свободы в сочетании с тремя поступательными (X, Y, Z), можно добиться практически любого направления силовых линий магнитного поля в пространстве, предпочтительно, в заранее заданной точке рабочей области, и, следовательно, управлять объектом с высокой эффективностью.
Неподвижное основание 200 заявленного устройства, в общем, представляет собой сборный рамный каркас. Каркас состоит из отдельных функциональных частей, в частности, двух симметричных опорных рам 201 для крепления концов звеньев по меньшей мере двух манипуляторов-триподов 100 на каждом, и опорно-удерживающей части 202.
Опорные рамы 201 и опорно-удерживающая часть 202 могут быть выполнены различной геометрической формы, обеспечивающей возможность манипуляции одним предметом одним устройством в одной перекрещивающейся рабочей области.
Например, в одном из вариантов осуществления (фиг. 1), опорная рама состоит из двух жестко связанных частей. Каждая из частей изготовлена из двух равнобедренных треугольников. Одна из боковых сторон каждого треугольника является длинной стороной прямоугольника, расположенного между ними. Стык между частями рам осуществляется по короткой стороне прямоугольника.
Концы звеньев по меньше мере двух манипуляторов-триподов 100 закреплены в углах при основании равнобедренных треугольников разных частей рамы.
Опорно-удерживающая 202 часть выполнена в виде одной вертикальной стойки, жестко связанной с обоими опорными рамами, расположенным симметрично.
Схема устройства для генерации магнитного поля с неподвижным основанием подобной конструкции обеспечивает механическую жесткость узлов пространственного перемещения и наличия доступа к пациенту с боковой стороны.
Также возможен схожий с описанным выше вариант выполнения неподвижного основания 200, представленный на фиг. 3.
Габаритные размеры каркаса могут составлять, ориентировочно, 1500×1500×2000 мм.
В другом варианте воплощения (фиг. 6) опорная рама представляет собой две пересекающиеся рамы прямоугольной формы с перекладинами. Опорно-удерживающая часть 202 выполнена в виде четырех рам прямоугольной формы с перекладинами, жестко связанными с обоими опорными рамами 201. Отдельные части соединяются посредством стандартного крепежа и усиливаются при помощи раскосов.
Конструкция выполнена таким образом, что является универсальной с точки зрения использования источников магнитного поля. Источник магнитного поля 300 может быть выполнен в виде по меньшей мере одного постоянного магнита, электромагнита или электромагнита с сердечником, в виде системы, включающей электромагнит и по меньшей мере один постоянный магнит.
Конкретное исполнение устройства, а именно, расположение, сочетание и форма источников постоянного магнитного поля зависит от особенностей процесса, в котором применяется устройство, в том числе, от введенного в пациента объекта.
Форма источников постоянного магнитного поля может быть различной (диски, параллелепипеды, кубы, сегменты, кольца), однако предпочтительно использовать источники в форме параллелепипедов.
Ниже представлено описание структурной схемы (один из вариантов) заявляемого устройства, используемой для проверки работоспособности численного алгоритма нахождения положения и ориентации магнитного диполя.
В качестве объекта использована эндоскопическая капсула. Схема устройства включает четыре манипулятора-трипода для управления в пространстве четырех постоянных магнитов, которые имеют 5 степеней свободы - 3 пространственных и 2 угловых. Использование устройства на основе постоянных магнитов имеет существенное преимущество перед электромагнитными системы в первую очередь по массе (до 3х раз ниже при создании тех же усилий) и по потребляемой мощности (до 2-3 раз).
Подобная конструкция устройства позволяет создать в рабочей области магнитные силы в различных возможных направлениях при произвольном направлении самого вектора поля, что позволит с высокой эффективностью управлять эндоскопической капсулой.
В качестве рабочей области принята область в виде цилиндра диаметром 500 мм.
В данной конструктивной схеме устройства размер магнита составлял ∅100×180 мм, намагничен аксиально, марка материала N40, масса 10.6 кг.
В связи с тем, что для достижения управляемости эндоскопической капсулы значение градиента поля рассчитывается исходя из того, что значение магнитной силы должно быть сравнимо со значением веса эндоскопической капсулы, постоянные магниты заявляемого устройства не могут располагаться к оси указанной выше рабочей области ближе, чем 250 мм.
В случаях, когда два манипулятора-трипода располагаются рядом, минимальное расстояние между источниками постоянного магнитного поля составляет около 100 мм. Устройство работает следующим образом.
Положение капсулы и ее ориентация отслеживаются в реальном времени с помощью одной из нескольких возможных методик;
1) измерение поля от постоянного магнита капсулы либо ее магнитного каркаса с помощью системы внешних датчиков магнитного поля, или
2) измерение отклика расположенной в капсуле либо ее магнитном каркасе катушки на радиочастотный сигнал внешней излучающей катушки с помощью системы внешних детекторов,
3) методом измерения задержки сигнала от двух радиопередатчиков.
В одном из возможных вариантах реализации схемы для случая ручного управления, в частности, с применением джойстика, оператор получает сигнал видеокамеры эндоскопической капсулы и относительно изображения на экране процессорного устройства с помощью джойстика дает команды переместиться и/или повернуть видеокамеру (то есть, и эндоскопическую капсулу). Одновременно система датчиков устанавливает координаты и углы. Эти значения используются процессорным устройством для пересчета команд джойстика в систему координат, связанную с манипулятором, и вычисления конфигурации источников поля, требуемой для создания нужной силы и ориентации капсулы в данной точке.
Процессорное устройство также учитывает ограничения, связанные с взаимным расположением манипуляторов (непересечение конструктивных элементов в процессе движения), безопасностью (не сводить источники постоянного магнитного поля вплотную, не проникать в зону расположения пациента, не создавать излишнего усилия на стенку ЖКТ, плавностью движения капсулы (при переходе в новое положение манипуляторов возможны разные последовательности движений, и они должны быть проверены на предмет отсутствия нестабильности или, например, резких рывков в положении или ориентации капсулы).
Возможно варианты реализации схемы устройства, основанные на роботизированном управлении манипулятора без участия оператора.
Приведенное описание примерного варианта осуществления дает общее представление о принципах конструирования, функционирования, изготовления и применения устройства, предлагаемого настоящим изобретением. По меньшей мере, один пример из данных вариантов осуществления проиллюстрирован прилагаемыми чертежами. Специалистам в данной области техники очевидно, что конкретные устройства, описанные в настоящем документе и проиллюстрированные на прилагаемых чертежах, представляют собой неограничивающие примерные варианты осуществления, и что объем настоящего изобретения определяется исключительно формулой изобретения. Признаки, проиллюстрированные или описанные в связи с одним примерным вариантом осуществления, можно объединять с признаками других вариантов осуществления. Предполагается, что такие модификации и изменения находятся в пределах объема настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ИНОРОДНОГО ТЕЛА ВНУТРИ ПАЦИЕНТА ВНЕШНИМ МАГНИТНЫМ ПОЛЕМ | 2017 |
|
RU2683204C1 |
| Устройство для отделения кожи лица от подлежащих тканей | 2019 |
|
RU2714192C1 |
| СМЕННЫЙ МАГНИТОУПРАВЛЯЕМЫЙ КАРКАС ДЛЯ АКТИВНОЙ ЭНДОСКОПИЧЕСКОЙ КАПСУЛЫ ДЛЯ ПРОВЕДЕНИЯ ОБСЛЕДОВАНИЯ ЖЕЛУДОЧНО-КИШЕЧНОГО ТРАКТА | 2016 |
|
RU2632780C1 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| КОМБИНИРОВАННЫЙ МАНИПУЛЯТОР РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2721485C1 |
| ЭНДОСКОПИЧЕСКИЙ НАПРАВЛЯЮЩИЙ ЗОНД, В ЧАСТНОСТИ, ДЛЯ КОЛОНОСКОПИИ И СИСТЕМА ДЛЯ ЭНДОСКОПИИ, СОДЕРЖАЩАЯ ТАКОЙ НАПРАВЛЯЮЩИЙ ЗОНД | 2018 |
|
RU2768574C2 |
| Кресло многофункциональное, роботизированное, с программным управлением (ЧПУ), для лечебных и иных процедур полостей тела; инновационные методы и технологии оборудования процедурного кабинета, рабочего места врача и участия врача в лечебном процессе | 2018 |
|
RU2705142C1 |
| МОБИЛЬНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ МИКРОРОБОТ | 1999 |
|
RU2164362C2 |
| Автономный мобильный модуль роботизированного хирургического инструмента | 2019 |
|
RU2715684C1 |
| Ретрактор тканей для эндоскопической увеличивающей маммопластики | 2019 |
|
RU2713973C1 |
Изобретение относится к медицинской технике, в целом к медицинской системе для дистанционного беспроводного управления движением инородного тела, расположенного внутри пациента. Устройство перемещения расположенного внутри тела пациента намагниченного объекта включает по меньшей мере четыре манипулятора, расположенных на едином основании попарно с каждой стороны рабочей области и выполненных с возможностью перемещения по линейным координатам X, У, Z, при этом в каждом манипуляторе установлен источник постоянного магнитного поля с возможностью поворота по двум взаимно перпендикулярным осям, и процессорное устройство, выполненное с возможностью подачи управляющего сигнала на каждый манипулятор для согласованного перемещения источников постоянного магнитного поля. Использование изобретения позволяет повысить эффективность позиционирования объекта. 6 з.п. ф-лы, 8 ил.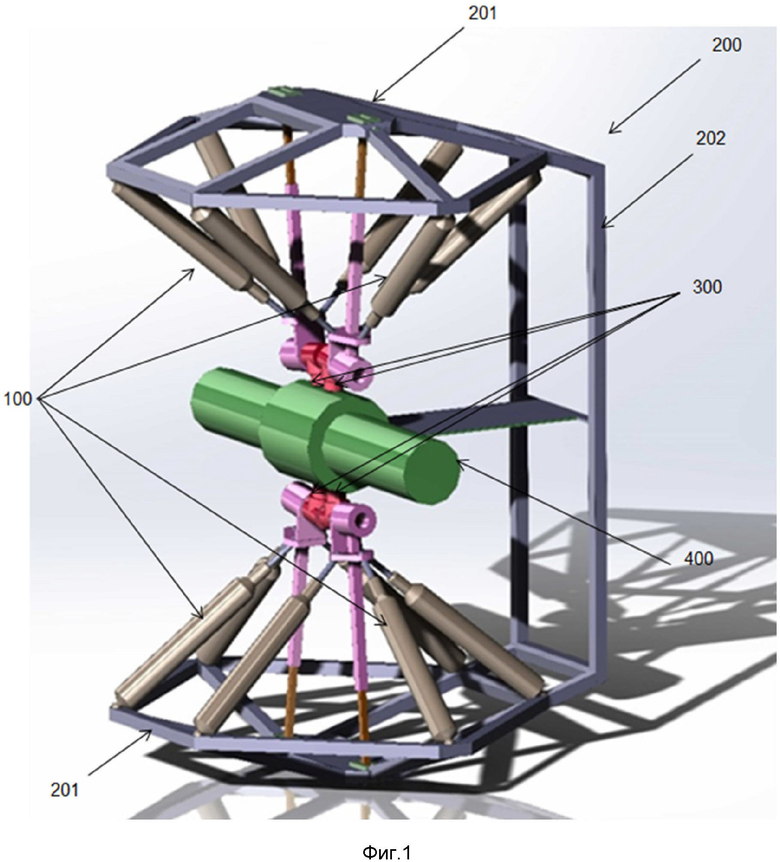
1. Устройство перемещения расположенного внутри тела пациента намагниченного объекта, включающее
по меньшей мере четыре манипулятора, расположенные на едином основании попарно с каждой стороны рабочей области и выполненные с возможностью перемещения по линейным координатам X, У, Z,
при этом в каждом манипуляторе установлен источник постоянного магнитного поля с возможностью поворота по двум взаимно перпендикулярным осям,
и процессорное устройство, выполненное с возможностью подачи управляющего сигнала на каждый манипулятор для согласованного перемещения источников постоянного магнитного поля.
2. Устройство по п. 1, отличающееся тем, что в качестве объекта может выбран один из: эндоскопическая капсула, медицинский микроробот, лекарственный раствор с магнитными наночастицами, микро- или наноиглы, сенсор и стимулятор.
3. Устройство по п. 1, отличающееся тем, что источник постоянного магнитного поля выполнен в виде по меньшей мере одного постоянного магнита.
4. Устройство по п. 1, отличающееся тем, что источник постоянного магнитного поля выполнен в виде электромагнита или электромагнита с сердечником.
5. Устройство по п. 1, отличающееся тем, что источник постоянного магнитного поля выполнен в виде системы, включающей электромагнит и по меньшей мере один постоянный магнит.
6. Устройство по п. 1, отличающееся тем, что манипулятор выполнен на основе пространственного механизма параллельной структуры.
7. Устройство по п. 6, отличающееся тем, что манипулятор выполнен в виде манипулятора-трипода, который состоит из трех линейных приводов и привода вращения, который установлен в конечной точке линейных приводов, при этом привод вращения скомпонован для закрепления источника постоянного магнитного поля.
| KR 100540758 B1, 10.01.2006 | |||
| US 2007221233 A1, 27.09.2007 | |||
| US 2015192241 A1, 09.07.2015 | |||
| US 2016278662 A1, 29.09.2016 | |||
| СТАРИКОВСКИЙ А.В | |||
| и др | |||
| Считыватель для капсульного эндоскопического комплекса, СПЕЦТЕХНИКА И СВЯЗЬ, N 3, 2014, сс.52-58 | |||
| АВТОМАТИЧЕСКИЙ РЕГУЛЯТОР МЕЖЭЛЕКТРОДНОГО ЗАЗОРА ДЛЯ ЭЛЕКТРОЭРОЗИОННЫХ УСТАНОВОК | 0 |
|
SU165065A1 |

