Изобретение относится к области оптических средств измерения параметров относительного сближения космических аппаратов (КА), а именно к оптико-электронным системам контроля скорости.
Повышение безопасности операции причаливания требует ограничения максимальной скорости сближения в безопасных пределах, превышение которых должно быть обнаружено с достаточной надежностью.
В настоящее время, в случае отказа системы взаимных измерений при ручном управлении сближением на дальностях менее 60 м контроль скорости осуществляется визуально экипажем через оптический визир, а в режиме телеоператорного радиоуправления по телевизионному изображению. Таким образом, возрастает нагрузка на оператора, который обеспечивает поддержание необходимой скорости сближения. Становится актуальным поиск методов и средств для облегчения работы экипажа, повышения достоверности и надежности измерений скорости сближения КА.
Для этого является целесообразным использование дополнительных датчиков, сигнализирующих о превышении допустимых ограничений скорости в случае отказа основной системы взаимных измерений (радиотехнической или лазерно-оптической).
В качестве дополнительных датчиков можно использовать второй, резервированный комплект измерительной аппаратуры, как это реализовано в КА ATV Европейского космического агентства, на котором используется по два комплекта из двух лазерно-оптических приборов [1].
Однако такой подход увеличивает массу, габариты и энергопотребление аппаратуры.
Аналогом является телевизионная система определения скоростных характеристик отдельных транспортных средств, движущихся в общем потоке [2]. Скорость движения объектов определяется на основе специальных алгоритмов обработки информации, содержит данные об изменении положения в пространстве объектов, находящихся в поле зрения телекамер.
Еще одним аналогом является система измерения параметров торможения лифтов и подъемников на основе потока фотоизображений [3]. На нижней части лифта или подъемника размещается оптический маяк - контрастная геометрическая фигура, и источник подсветки, а в шахте лифта установлена быстродействующая фотокамера.
Аналогами также являются устройства, использующее для измерения параметров движущегося объекта эффект динамических искажений, возникающий в КМОП-датчиках за время одного кадра [4, 5]. Эффект обусловлен особенностями работы электронного затвора приемников излучения на базе КМОП-технологии. Накопление строк в таком датчике происходит не синхронно, а со смещением во времени (бегущий затвор).
Суть эффекта состоит в том, что движущиеся объекты на изображении получаются искаженными: вертикальные линии становятся наклонными. Особенно это проявляется при использовании длительных выдержек. Вид геометрических искажений зависит от взаимной ориентации в пространстве направления движения наблюдаемого объекта и направлений горизонтальной и вертикальной развертки КМОП-датчика, а их величина - от скорости движения объекта, а также от формата и тактовой частоты камеры.
За прототип принято устройство, предназначенное для повышения точности формирования изображения движущихся объектов в системах охранной сигнализации и контроля технологических процессов на основе КМОП-датчика [6].
Устройство включает в себя телекамеру, контроллер, первый и второй блоки памяти изображения, многоканальный корреляционный анализатор, вычислительный процессор и блок хранения фонового кадра.
Телекамера выполнена на основе КМОП-датчика с бегущим электронным затвором с возможностью синхронного формирования кадров с противоположно направленными развертками опорного и базового изображений. Вычислительный процессор выполнен с возможностью сортировки пикселей изображений фона и движущихся объектов под управлением корреляционного анализатора, а также преобразования координат пикселей движущихся объектов.
Принцип действия устройства заключается в формировании и анализе опорного и корректирующего изображений с последующим расчетом координат элементов изображения, в котором отсутствуют геометрические искажения движущихся объектов, в чем и заключается достигнутый технический результат.
Недостатки аналогов и прототипа заключаются в том, что они требуют достаточной освещенности объекта измерений, предназначены для измерений скорости объектов, движущихся под углом к датчику, что затрудняет их использование для приближающегося на встречном курсе объекта, требуют значительной площади оптического маяка, которая ограничена площадями размещения на КА, либо вообще не позволяют измерять скорость.
Задачей изобретения является увеличение надежности и, как следствие, повышение безопасности операции сближения и стыковки КА в том числе в различных светотехнических условиях, с одновременным уменьшением массогабаритных характеристик, за счет использования оптико-электронной системы.
Задача решается тем, что в систему контроля скорости космических аппаратов при сближении, которая включает телекамеру с приемником на основе КМОП-датчика, введены узкополосный светофильтр, блок управления и обработки сигнала, расположенные на активном космическом аппарате, а также четыре оптических маяка на пассивном космическом аппарате, при этом оптические маяки расположены в плоскости стыковочного узла, перпендикулярной оси «OX» пассивного космического аппарата, образуя прямоугольник, две стороны которого параллельны строкам чувствительных элементов КМОП-датчика.
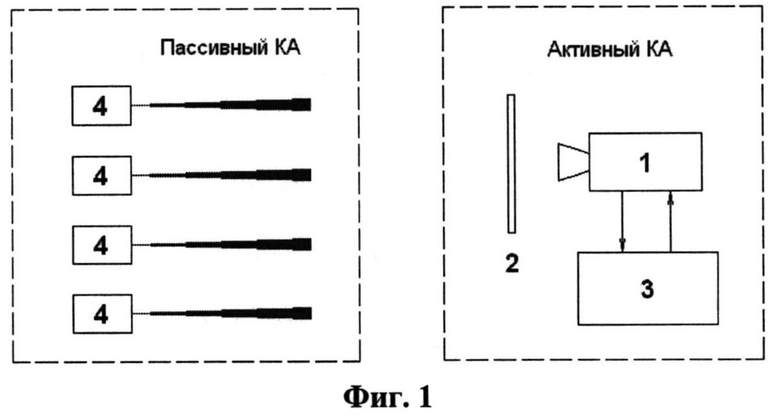
На Фиг.1 изображена конструкция предложенного изобретения, где:
1 - телекамера;
2 - узкополосный светофильтр;
3 - блок управления и обработки сигнала;
4 - оптические маяки.
Система содержит телекамеру 1, служащую для получения изображения пассивного КА, узкополосный, например, интерференционный светофильтр 2 для подавления засветок от подстилающей поверхности и бликов конструкции пассивного КА, блок управления и обработки сигнала 3 для вычисления скорости пассивного КА и переключения режимов работы телекамеры 1, оптические маяки 4 на пассивном КА, предназначенные для определения местоположения последнего.
Телекамера 1 работает в видимом или ближнем ИК спектральном диапазоне, полоса пропускания узкополосного светофильтра 2 совпадает со спектральным диапазоном излучения оптических маяков 4.
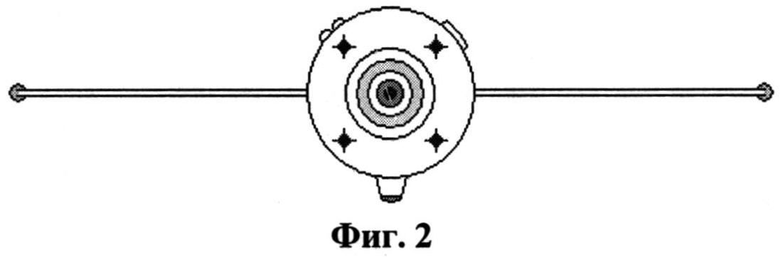
Оптические маяки 4 расположены на пассивном КА, так как показано на Фиг.2. Оптические маяки 4 располагаются таким образом, чтобы образовывать прямоугольник в поле зрения телекамеры 1, при этом две стороны этого прямоугольника параллельны строкам чувствительных элементов КМОП-датчика телекамеры 1, что является условием проявления эффекта смаза изображения маяков.
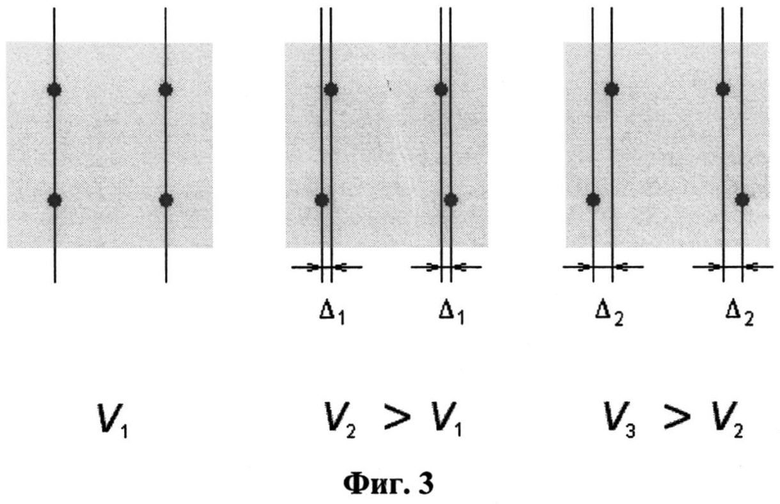
При чрезмерном возрастании скорости сближения V за время последовательного накопления сигнала в КМОП-датчике изображение нижней пары маяков оказывается смазанным относительно верхней пары (нижняя пара маяков получается растянутой по сравнению с верхней парой маяков на расстояние Δ, и прямоугольник на изображении, формируемом КМОП-датчиком, превращается в трапецию). Изменение геометрии расположения оптических маяков представлено на Фиг.3
В результате, отношение оснований трапеции определяет величину и направление скорости сближения КА. При сближении с пассивным КА нижнее основание трапеции будет больше верхнего. Отношение длины нижнего основания трапеции к верхнему будет увеличиваться с возрастанием скорости сближения КА. При зависании вместо трапеции на изображении будет прямоугольник. При движении КА в разные стороны (например, при расстыковке) верхнее основание трапеции будет больше нижнего, пропорционально величине скорости. Точность определения скорости определяется разрешением КМОП-датчика.
В качестве оптических маяков 4 могут использоваться полупроводниковые светоизлучающие диоды или полупроводниковые инжекционные лазеры (лазерные диоды). Последний вариант более предпочтителен в условиях сильных световых помех, так как ширина спектра излучения лазера значительно уже, что облегчает использование спектральной селекции. Для повышения надежности в составе каждого маяка может быть комплект из нескольких светоизлучающих диодов или лазеров.
Достигаемый технический результат - повышение надежности системы взаимных измерений параметров сближения КА и, как следствие, увеличение безопасности, за счет введения дополнительной системы контроля скорости сближения КА, не использующей активную подсветку в радио- и оптическом диапазоне и устойчивую к наличию световых помех.
Предложенная система позволяет определять превышение скорости при сближении кооперируемых КА по смазу изображения оптических маяков пассивного КА, возникающему в КМОП-датчике телекамеры активного КА. Так как маяки сами являются источником излучения, то для работы системы не требуется внешняя засветка. Благодаря использованию узкополосного светофильтра обеспечивается устойчивость системы к наличию сильных засветок.
Литература
1. The GNG measurement system for the automated transfer vehicle - http://www.issfd.org/ISSFD_2004/papers/P1010.pdf - 14.01/2012.
2. Макарецкий Е., Овчинников А., Нгуен Л.Х. Телевизионные измерительные системы контроля скоростного режима дорожного движения // Компоненты и технологии. 2007, №4. С.34-37.
3. Осипов С.П., Попов М.Ю., Федяев Р.В., Косач А.А. Способ определения параметров торможения лифтов и подъемников на основе анализа потока фотоизображений - http://agps-2006.narod.ru/ttb/2011-4/12-04-11.ttb.pdf - 30.09.12.
4. Пилипко Н.Е., Рычажников А.Е. Особенности работы КМОП фотоприемника в режиме бегущего электронного затвора // Известия Санкт-Петербургского государственного электротехнического университета ЛЭТИ. 2008, №1. С.40-54.
5. Рычажников А.Е. Методы измерения скоростей движущихся объектов с помощью цифровых видеосистем на основе КМОП технологии // Оптико-электронные приборы и устройства в системах распознавания образов, обработки изображений и символьной информации: Сб. мат. VIII Межд. конф. 4.2. Курск, 2008. С.86-87.
6. Формирователь изображения. Патент РФ №2389153 / ООО «НПК «ЕС-Эксперте» / Багров В.В., Рычажников А.Е. Заявка №2008143871/09 от 05.11.2008.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля диаграммы направленности антенны облетным методом с помощью БПЛА | 2022 |
|
RU2836791C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ПАССИВНОГО КОСМИЧЕСКОГО ОБЪЕКТА ПРИ СБЛИЖЕНИИ С НИМ АКТИВНОГО КОСМИЧЕСКОГО АППАРАТА | 2011 |
|
RU2494415C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ПАССИВНОГО КОСМИЧЕСКОГО ОБЪЕКТА ПРИ СБЛИЖЕНИИ С НИМ АКТИВНОГО КОСМИЧЕСКОГО АППАРАТА | 2011 |
|
RU2474844C1 |
| СКАНИРУЮЩИЙ ЛАЗЕРНЫЙ МАЯК КОСМИЧЕСКИХ АППАРАТОВ | 2011 |
|
RU2462732C1 |
| СКАНИРУЮЩИЙ ЛАЗЕРНЫЙ МАЯК КОСМИЧЕСКИХ АППАРАТОВ | 2011 |
|
RU2462731C1 |
| УСТРОЙСТВО КОНТРОЛЯ ОРИЕНТАЦИИ ПАССИВНЫХ КОСМИЧЕСКИХ АППАРАТОВ | 2011 |
|
RU2486112C1 |
| УСТРОЙСТВО КОНТРОЛЯ ОРИЕНТАЦИИ НАБЛЮДАЕМОГО ОБЪЕКТА | 1993 |
|
RU2093432C1 |
| СПОСОБ КОНТРОЛЯ СКОРОСТИ ОТНОСИТЕЛЬНОГО ДВИЖЕНИЯ КОСМИЧЕСКИХ АППАРАТОВ | 2019 |
|
RU2725010C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ РАЗЛИЧНЫХ ПОЛЕЙ ЗРЕНИЯ | 2012 |
|
RU2505844C2 |
| УСТРОЙСТВО КОНТРОЛЯ ОРИЕНТАЦИИ КОСМИЧЕСКИХ АППАРАТОВ ПРИ СБЛИЖЕНИИ | 2017 |
|
RU2662620C1 |
Изобретение относится к области оптических средств измерения параметров относительного сближения космических аппаратов (КА), а именно к оптико-электронным системам контроля скорости. Система контроля скорости космических аппаратов при сближении включает расположенные на активном космическом аппарате телекамеру с приемником на основе КМОП-датчика, узкополосный светофильтр, блок управления и обработки сигнала. На пассивном космическом аппарате в плоскости стыковочного узла, перпендикулярной оси «OX» этого аппарата, расположены четыре оптических маяка. Оптические маяки образуют прямоугольник, две стороны которого параллельны строкам чувствительных элементов КМОП-датчика. Телекамера служит для получения изображения пассивного КА, узкополосный светофильтр подавляет засветки от подстилающей поверхности и бликов конструкции пассивного КА, блок управления и обработки сигнала осуществляет вычисление скорости пассивного КА и переключение режимов работы телекамеры. Достигаемый технический результат - повышение надежности системы взаимных измерений параметров сближения КА и, как следствие, увеличение безопасности, за счет введения дополнительной системы контроля скорости сближения КА, не использующей активную подсветку в радио- и оптическом диапазоне и устойчивую к наличию световых помех. 3 ил.
Система контроля скорости космических аппаратов при сближении, включающая телекамеру с приемником на основе КМОП-датчика, отличающаяся тем, что в нее введены узкополосный светофильтр, блок управления и обработки сигнала, расположенные на активном космическом аппарате, а также четыре оптических маяка на пассивном космическом аппарате, при этом оптические маяки расположены в плоскости стыковочного узла, перпендикулярной оси «ОХ» пассивного космического аппарата, образуя прямоугольник, две стороны которого параллельны строкам чувствительных элементов КМОП-датчика.
| СПОСОБ ОПРЕДЕЛЕНИЯ ОТНОСИТЕЛЬНЫХ ПОЛОЖЕНИЯ И ТРАЕКТОРИИ ДВУХ КОСМИЧЕСКИХ АППАРАТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2103202C1 |
| US 5119305 A1, 02.06.1992 | |||
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРИЧАЛИВАНИЕМ | 1996 |
|
RU2104233C1 |
| US 6658329 B1, 02.12.2003 | |||

