Изобретение относится к технике антенных измерений и может быть использовано для исследования диаграммы направленности передающих и приемных антенн методом их облета.
Для проведения измерений диаграммы направленности антенн облетным методом в настоящее время применяются беспилотные летательные аппараты (БПЛА), управляемые дистанционно или выполняющие полет в полностью автоматическом режиме.
При измерении диаграммы направленности различных передающих и приемных антенн в ряде случаев имеется целый перечень технических проблем:
- введение ряда жестких ограничений, таких как: излучение только в выделенный сектор пространства, определенное время сеансов включения, необходимость разворота крупногабаритного и громоздкого носителя исследуемой антенны;
- может ограничиваться работа других находящихся поблизости радиотехнических средств, способных создавать помехи при измерениях;
- определение координат средств измерений с помощью аппаратуры спутниковой навигации (АСН) затрудняется в условиях сильных помех, при переотражении сигналов от близлежащих объектов и в случае экранирования созвездия навигационных спутников различными сооружениями. Кроме того, на некоторых территориях и рядом с определенными объектами работа АСН может целенаправленно ограничиваться.
Особенно актуальны эти проблемы при проведении измерений диаграмм направленности бортовых радиолокационных станций (РЛС) летательных аппаратов (ЛА) в наземных условиях.
Заявляемое к регистрации изобретение позволяет решить все вышеперечисленные технические проблемы путем изменения самого принципа проведения измерения без существенных затрат на его реализацию.
В настоящее время известно несколько способов контроля диаграммы направленности антенн облетным методом.
Аналогом изобретения является система определения диаграммы направленности антенны в дальней зоне (US патент № 10067172, 04.09.2018 «Far-field antenna pattern characterization via Drone/UAS platform»), реализуемая на базе беспилотной авиационной системы или пилотируемого ЛА, выполняющих полет в дальней зоне диаграммы направленности исследуемой антенны. На борту БПЛА (пилотируемого ЛА) установлена приемная антенна, соединенная с измерителем мощности, АСН и регистратор данных, связанный с измерителем мощности и АСН. Регистратор данных фиксирует результаты измерений и их координаты для формирования диаграммы направленности исследуемой антенны в дальней зоне. Наземная базовая станция может использоваться для приема результатов измерений и координат БПЛА в режиме реального времени или для обработки данных после полета.
Недостатком аналога является необходимость использования АСН и радиолинии, работа которых может быть нарушена при большой мощности излучения исследуемой антенны и других находящихся поблизости радиотехнических средств.
Аналогом изобретения является способ измерения параметров направленности крупноапертурной антенны с помощью БПЛА методом облета (RU пат. № 2626561 «Способ измерения параметров направленности антенны с помощью БПЛА методом облета»), в котором для полной автоматизации процесса, а также повышения точности, сокращения времени и снижения затрат используется БПЛА (коптерного, самолетного или иного типа) с измерительной аппаратурой на борту, совершающий круговые облеты исследуемой антенны, вдоль маршрута, представляющего собой сечения сферы с радиусом, превышающим расстояние, удовлетворяющее условию дальней зоны исследуемой антенны, в полностью автоматическом режиме. Для определения координат БПЛА используется АСН, а дополнительная точность обеспечивается за счет внесения полученных с контрольно-корректирующей станции (ККС) дифференциальных поправок в результат измерений в процессе постобработки.
Недостаток аналога заключается в отсутствии контроля взаимного расположения исследуемой антенны и измерительной антенны, а именно расположения оси, проходящей через фазовый центр измерительной антенны относительно фазового центра исследуемой антенны, что приводит к появлению неустранимых погрешностей, а также к необходимости использования АСН и ККС, на работоспособность которых может повлиять излучение исследуемой антенны и других находящихся поблизости радиотехнических средств.
Прототипом является способ измерения параметров направленности крупноапертурной антенны в дальней зоне с помощью БПЛА методом облета (RU пат. № 2704393 «Способ автоматизированной ориентации бортовой антенны беспилотного комплекса для измерений параметров направленности антенн»), отличающийся тем, что с целью повышения точности измерений измерительная антенна устанавливается на гиростабилизированный подвес, который в процессе облета ориентирует электрическую ось измерительной антенны в направлении на фазовый центр исследуемой антенны, изменяя в автоматическом режиме углы стабилизации гиростабилизированного подвеса, рассчитанные контроллером наведения на основе навигационных данных от АСН. С целью управления поляризацией излучения измерительной антенны управляют углом крена гиростабилизированного подвеса, а для сокращения влияния отражений от земли координату высоты точки наведения измерительной антенны выбирают таким образом, чтобы в направлении отраженного от земли луча было минимально возможное значение усиления измерительной антенны с учетом ее собственной диаграммы направленности при сохранении приемлемой энергетики радиолинии.
Недостаток прототипа также состоит в том, что для управления БПЛА и гиростабилизированным подвесом его измерительной антенны необходимо использование АСН и радиолинии, работа которых может быть нарушена излучением исследуемой антенны и других находящихся поблизости радиотехнических средств.
В то же время известны используемые в космической технике принципы определения ориентации взаимодействующих космических объектов при стыковке по их оптическим изображениям (Федосеев В.И. «Автоматическая лазерная система контроля параметров сближения кооперируемых космических аппаратов», Оптический журнал. 1996. № 7. с.66–70; Бачевский С.В. «Точность определения дальности и ориентации объекта методом пропорций в матричных телевизионных системах», Вопросы радиоэлектроники. Сер. Техника телевидения. 2010 г. Вып. 1. с.57-66). Поэтому для надежного автономного управления движением БПЛА и точной привязки результатов измерений перспективно использование оптических методов измерения, т.к. они мало восприимчивы к радиопомехам.
Задачей изобретения является повышение помехозащищенности и надежности измерений диаграмм направленности приемных и передающих антенн, установленных на различных носителях и платформах (в т.ч. на борту ЛА) методом облета с помощью БПЛА в полностью автоматическом режиме.
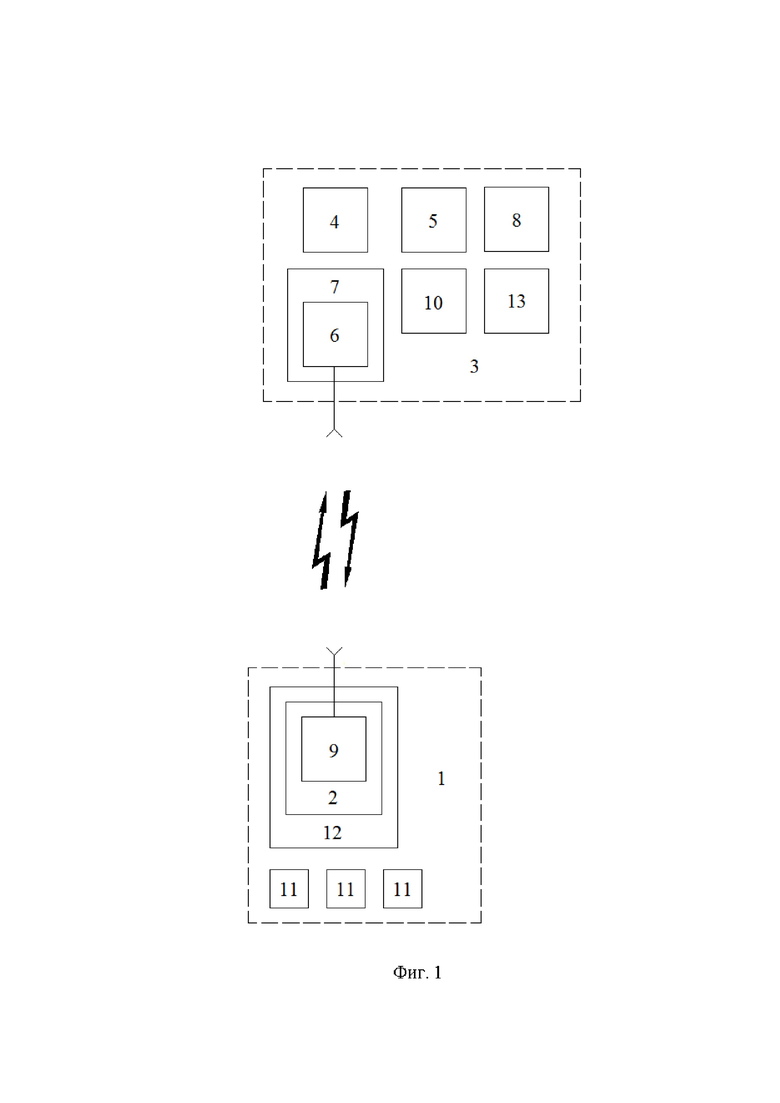
Задача решается тем, что, как показано на фиг.1, платформа 1 определенным образом выставляется на стоянке, ее радиотехническая аппаратура 2 включается на излучение или на прием в выделенном секторе пространства, а БПЛА 3 с бортовой измерительной аппаратурой, в состав которой входят приемник 4, передатчик 5, измерительная антенна 6 на опорно-поворотном устройстве 7, таймер 8, выполняет полет в автоматическом режиме по заранее запрограммированной траектории, лежащей на плоскости, нормаль к которой совпадает с направлением на фазовый центр исследуемой антенны 9, неподвижной при проведении измерений, при этом с помощью пассивного оптического датчика с матричным фотоприемным устройством (МФПУ) 10 осуществляется позиционирование БПЛА относительно исследуемой антенны 9 по изображениям световых маяков 11 и мишени 12, установленных на платформе 1, и определяется направление на фазовый центр исследуемой антенны 9, на который посредством опорно-поворотного устройства направляется измерительная антенна 6, а результаты измерений с привязкой ко времени и координатам относительно исследуемой антенны 9 записываются в бортовой накопитель 13.
Определение ориентации платформы осуществляется с использованием реперных точек – световых маяков (на базе лазеров или светодиодов), изображения которых на МФПУ представляют собой точечные источники. Координаты световых маяков привязаны к координатам платформы. Как вариант, в качестве световых маяков могут быть использованы включенные световые приборы платформы.
Для навигации по световым маякам применяется угломерный (триангуляционный) метод, основанный на измерении наблюдаемого размера некоторого линейного отрезка заданной длины, который известным образом сориентирован в системе координат платформы. Для определения ориентации наблюдаемого объекта минимально требуется не менее трех реперных точек, две из которых находятся в одной плоскости (первая база), а третья несколько сдвинута относительно нее (вторая база) (Федосеев В.И. «Автоматическая лазерная система контроля параметров сближения кооперируемых космических аппаратов», Оптический журнал. 1996. № 7. с.66-70).
Для повышения точности и предотвращения неоднозначности измерений может быть использовано большее количество маяков. Необходимое условие заключается в знании точных координат точек установки маяков на носителе антенны.
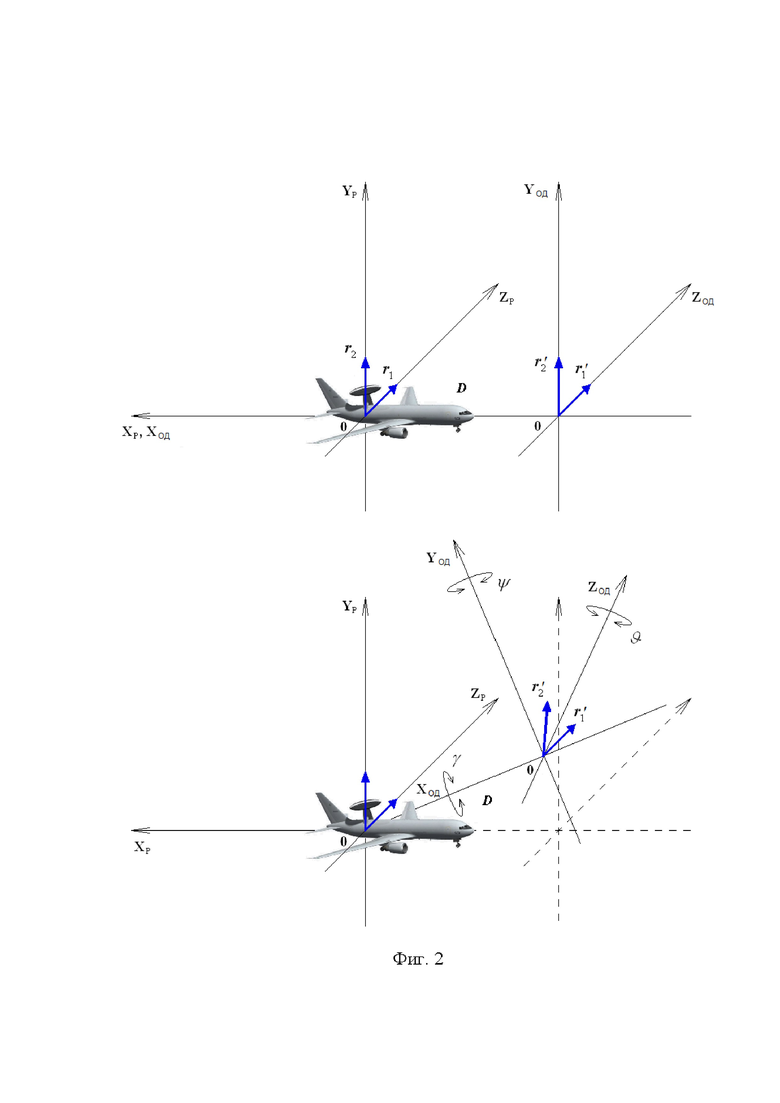
Для оценки углов отклонения наблюдаемого объекта по двумерному изображению, формируемому МФПУ, может использоваться методика, аналогичная описанной в (Бачевский С.В. «Точность определения дальности и ориентации объекта методом пропорций в матричных телевизионных системах», Вопросы радиоэлектроники. Сер. Техника телевидения. 2010 г. Вып. 1. с.57-66). Принцип определения ориентации платформы с использованием данного метода (на примере ЛА с бортовой РЛС во вращающемся обтекателе) показан на фиг. 2.
Пусть в начальный момент времени направление осей системы координат подсистемы реперных точек совпадает с направлением осей системы координат оптического датчика, а реперные точки расположены симметрично относительно оси «XОД» системы координат XОДYОДZОД оптического датчика. В плоскости платформы ориентация реперных точек определяется угловым положением ортогональных векторов r1 и r2 с общим началом в точке «О» системы координат XPYPZP, соответствующей началу координат (где находится пересечение первой и второй базы). В результате изменения положения платформы относительно оптического датчика реперные точки принимают положение, отличное от исходного. По результатам измерения координат векторов r1' и r2' в плоскости изображения выполняется оценка положения платформы с антенной.
Погрешности измерения углов отклонения (азимута ψ, угла места θ и разворота γ) определяются в первую очередь дискретной структурой МФПУ. Кроме того, погрешность измерений будет зависеть от дальности.
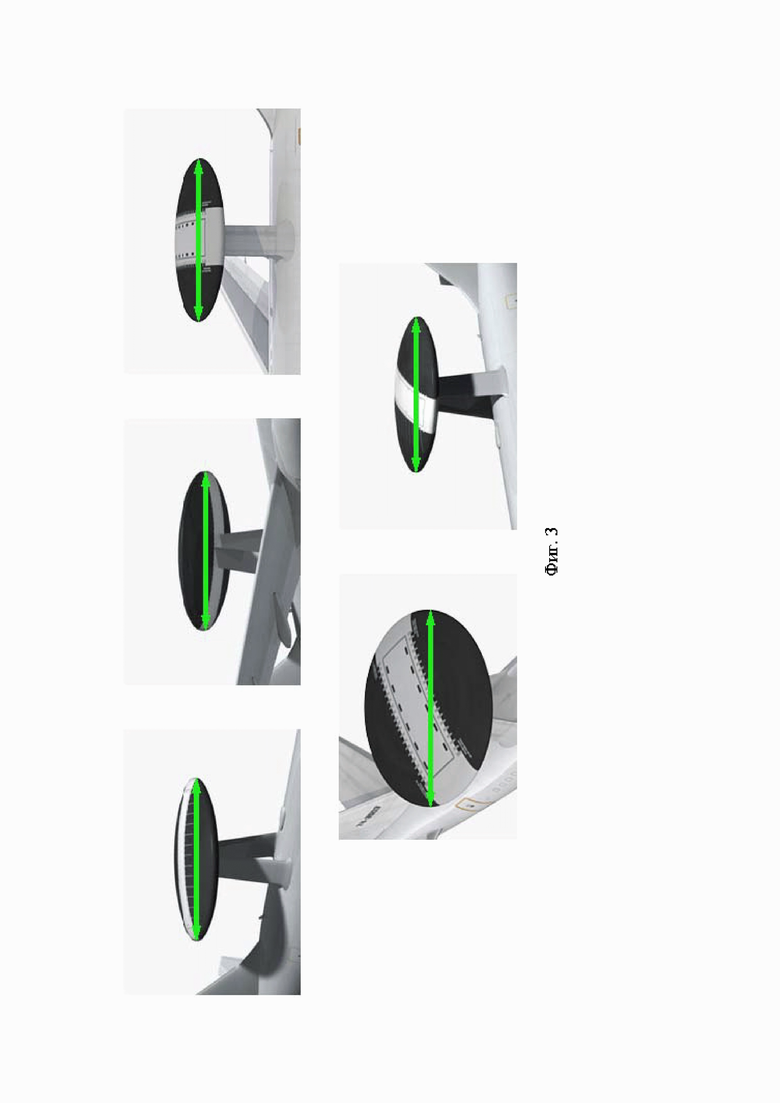
Кроме определения ориентации платформы для привязки измерения необходимы измерения дальности. Дальность определяется угломерным методом по оптическому изображению посредством измерений инвариантных параметров элементов конструкции платформы. Например, в авиационном радиотехническом комплексе в качестве такого элемента (мишени) может быть использован обтекатель бортовой РЛС в форме диска – независимо от ракурса наблюдения, его диаметр остается неизменным (см. фиг. 3), а видимый угловой размер изменяется пропорционально дальности.
Если на платформе отсутствуют элементы с такими свойствами, то они должны быть специально введены или размещены поблизости и привязаны к координатам исследуемой антенны.
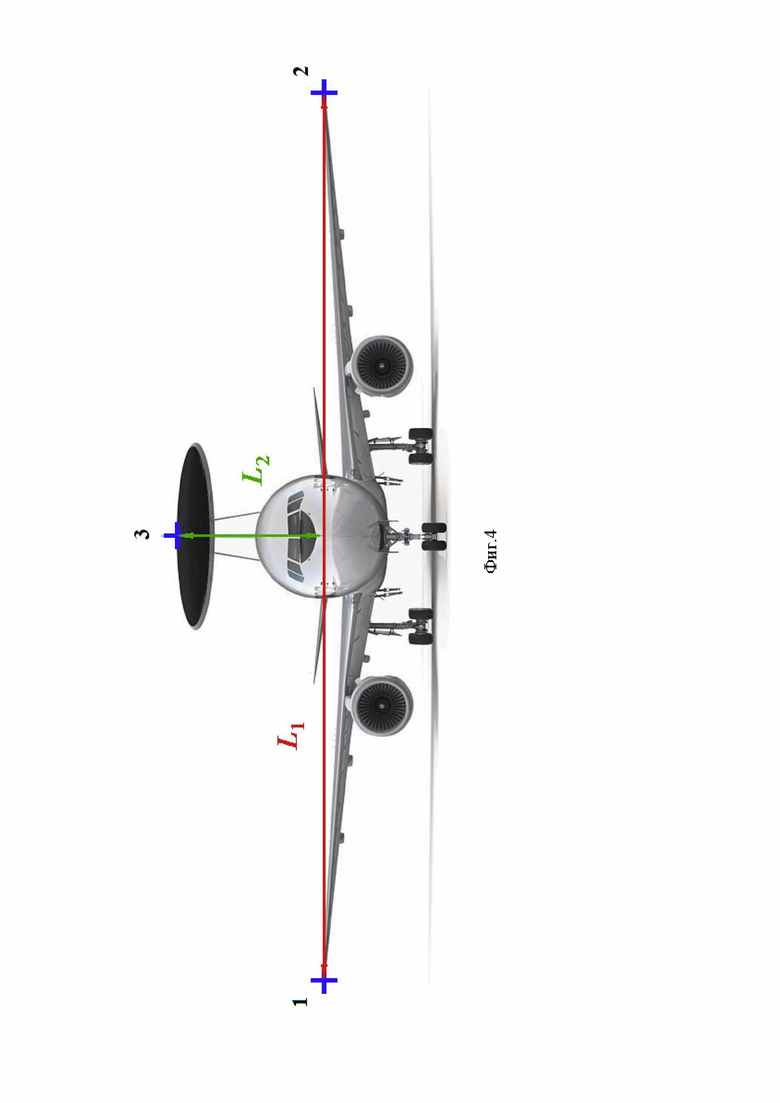
В качестве примера рассмотрим определение ориентации ЛА-носителя с бортовой РЛС во вращающемся обтекателе (фиг. 4).
Два маяка установлены на концах крыльев ЛА-носителя на расстоянии L1 = 50 м, а третий маяк вынесен вверх на L2 = 7 м – на вращающийся обтекатель бортовой РЛС, диаметр которого равен D = 10 м. Для измерений используется пассивный оптический датчик с угловым полем зрения ω = 30°×30° на базе МФПУ (типа ПЗС или КМОП) и разрешением 2048×2048 пикселей.
Оценки показывают, что погрешность измерений дальности угломерным методом по изображению вращающегося обтекателя бортовой РЛС на дистанции R = 1000 м составляет около 1,4 %. Погрешности определения углов азимута ψ, угла места θ и разворота γ составляют Δψ = 0°18', Δθ = 2°06' и Δγ = 0°12' соответственно. Большая погрешность при измерении угла места связана с небольшой длиной второй базы (L2 = 7 м). С увеличением ее длины до L2 = 20 м погрешность можно снизить до значения Δθ = 0°44'.
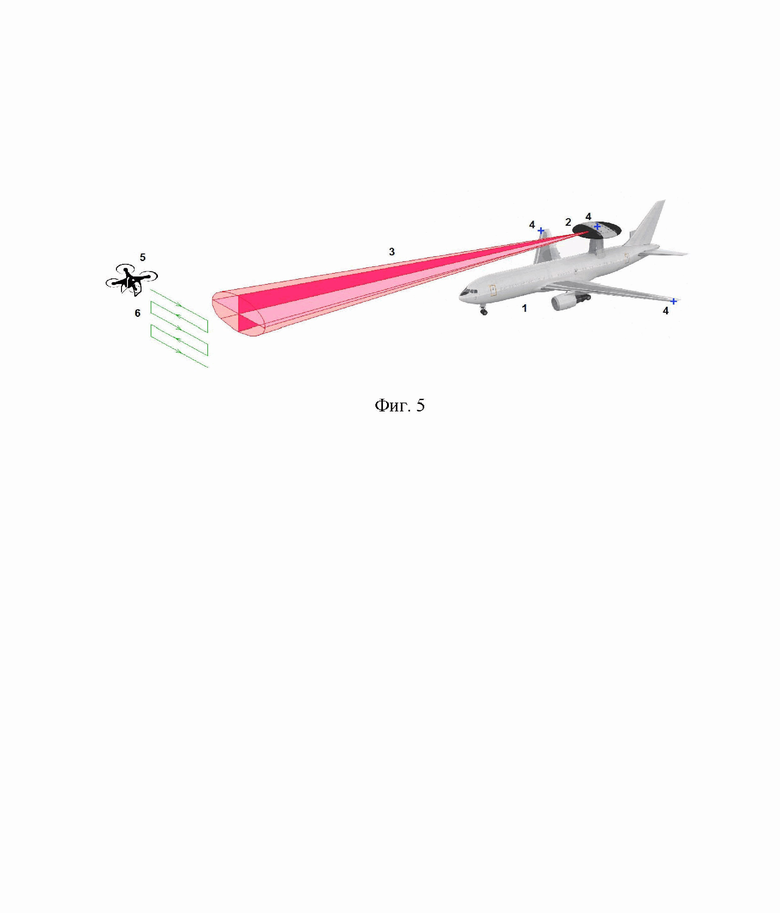
Процесс измерений диаграммы направленности бортовой РЛС представлен на фиг. 5, где
1 – ЛА-носитель;
2 – вращающийся обтекатель;
3 – диаграмма направленности бортовой РЛС;
4 – реперные точки с излучающими маяками;
5 – БПЛА с измерительной аппаратурой;
6 – запрограммированная траектория полета.
В процессе облета предполагается построчный способ перемещения БПЛА в границах облетной сетки. Облетная сетка представляет собой геометрическое место точек, располагающихся на траектории полета в процессе измерений. Узлы облетной сетки – это точки проведения измерений. Измерения уровня (амплитуды) поля выполняются через равные интервалы времени. Таймер на борту БПЛА перед началом измерений синхронизируется с сигналами точного времени. После прохождения соответствующей строки облетной сетки БПЛА переводится на новую строку, и процедура повторяется. Шаг облетной сетки выбирается, исходя из условий задачи.
По изображениям световых маяков и вращающегося обтекателя РЛС определяется направление на фазовый центр исследуемой антенны РЛС, на который посредством опорно-поворотного устройства направляется измерительная антенна БПЛА. В качестве опорно-поворотного устройства может быть использован гиростабилизированный подвес.
На практике для описания главного луча диаграммы направленности антенны используется не менее 10 точек. Данные результатов измерений с привязкой ко времени и координатам относительно фазового центра исследуемой антенны РЛС записываются в бортовой накопитель БПЛА.
Размеры платформы с исследуемой антенной могут не обеспечивать достаточную длину баз для установки маяков – например, если это подвижный сухопутный радиотехнический комплекс на колесном или гусеничном шасси.
Тогда такая платформа должна выставляться на заранее подготовленной площадке, на которой жестко устанавливаются маяки. Два маяка могут быть размещены на земле с требуемой длиной базы между ними, а третий установлен на мачте необходимой высоты. Если в конструкции платформы отсутствует мишень, то она специально вносится и также размещается на этой площадке. Координаты маяков и мишени должны быть привязаны к координатам платформы с точностью, необходимой для проведения измерений.
Наиболее предпочтительным для проведения измерений является БПЛА коптерного типа. К его преимуществам относятся высокая точность позиционирования, простота эксплуатации (не требуется взлетно-посадочной полосы) и небольшая стоимость.
Достигаемый технический результат согласно предложенному решению – повышение помехозащищенности, надежности и производительности измерений диаграммы направленности антенны облетным методом с помощью БПЛА, снижение перечня требований и простота реализации.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА АНТЕННЫХ ИЗМЕРЕНИЙ С ИСПОЛЬЗОВАНИЕМ БЕСПИЛОТНОГО ПРИВЯЗНОГО АЭРОСТАТА | 2023 |
|
RU2818996C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОЙ ОРИЕНТАЦИИ БОРТОВОЙ АНТЕННЫ БЕСПИЛОТНОГО КОМПЛЕКСА ДЛЯ ИЗМЕРЕНИЙ ПАРАМЕТРОВ НАПРАВЛЕННОСТИ АНТЕНН | 2019 |
|
RU2704393C1 |
| СПОСОБ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК НАПРАВЛЕННОСТИ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ В ЗОНЕ ФРЕНЕЛЯ С ПОМОЩЬЮ БЕСПИЛОТНОЙ АВИАЦИОННОЙ СИСТЕМЫ | 2022 |
|
RU2797461C1 |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ АНТЕННЫХ ХАРАКТЕРИСТИК НА ИЗМЕРИТЕЛЬНОЙ ПЛОЩАДКЕ | 2023 |
|
RU2804836C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ НАПРАВЛЕННОСТИ АНТЕННЫ С ПОМОЩЬЮ БПЛА МЕТОДОМ ОБЛЕТА | 2016 |
|
RU2626561C1 |
| СПОСОБ ИЗМЕРЕНИЯ ШИРИНЫ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ МЕТОДОМ ОБЛЕТА | 2023 |
|
RU2807022C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ МЕТОДОМ ОБЛЕТА | 2024 |
|
RU2822401C1 |
| СКАНИРУЮЩИЙ ЛАЗЕРНЫЙ МАЯК КОСМИЧЕСКИХ АППАРАТОВ | 2011 |
|
RU2462732C1 |
| СКАНИРУЮЩИЙ ЛАЗЕРНЫЙ МАЯК КОСМИЧЕСКИХ АППАРАТОВ | 2011 |
|
RU2462731C1 |
| СИСТЕМА СПУТНИКОВОЙ СВЯЗИ | 1994 |
|
RU2124270C1 |
Изобретение относится к технике антенных измерений и может быть использовано для исследования диаграммы направленности передающих и приемных антенн, установленных на различных носителях и платформах, методом их облета с помощью БПЛА. БПЛА с бортовой измерительной аппаратурой выполняет полет в полностью автоматическом режиме по заранее запрограммированной траектории, лежащей на плоскости, нормаль к которой совпадает с направлением на фазовый центр исследуемой антенны, при этом осуществляется позиционирование БПЛА относительно исследуемой антенны по изображениям световых маяков и мишени, координаты которых привязаны к координатам неподвижной и заранее выставленной платформы с исследуемой антенной, работающей на излучение или на прием в выделенном секторе пространства, во время облета определяется направление на фазовый центр исследуемой антенны, на который посредством опорно-поворотного устройства направляется измерительная антенна, а данные результатов измерений с привязкой ко времени и координатам записываются в бортовой накопитель БПЛА. Техническим результатом при реализации заявленного решения является повышение помехозащищенности и надежности измерений. 5 ил.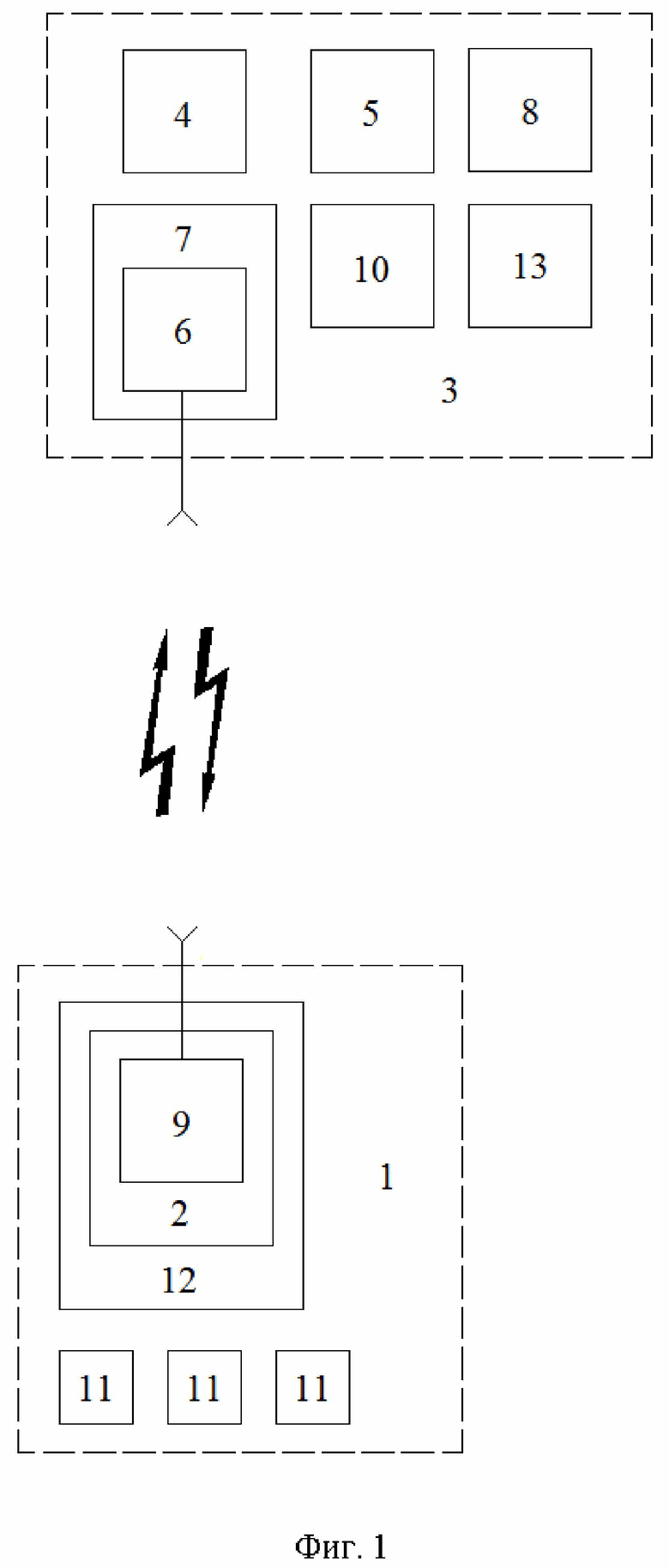
Способ контроля диаграммы направленности антенны облетным методом с помощью беспилотного летательного аппарата (БПЛА), отличающийся тем, что платформа с исследуемой антенной устанавливается неподвижно, диаграмма направленности исследуемой антенны также неподвижна в пространстве, а БПЛА с бортовой радиоизмерительной аппаратурой, в состав которой входят приемник, передатчик, измерительная антенна на опорно-поворотном устройстве и таймер, выполняет полет в автоматическом режиме, при этом измерительная антенна с помощью опорно-поворотного устройства направляется на фазовый центр исследуемой антенны, позиционирование БПЛА относительно исследуемой антенны осуществляется по изображениям световых маяков и мишени, координаты которых привязаны к координатам платформы, а данные результатов измерений с привязкой ко времени, отсчитываемому таймером, и координатам относительно фазового центра исследуемой антенны записываются в бортовой накопитель БПЛА.
| СПОСОБ АВТОМАТИЗИРОВАННОЙ ОРИЕНТАЦИИ БОРТОВОЙ АНТЕННЫ БЕСПИЛОТНОГО КОМПЛЕКСА ДЛЯ ИЗМЕРЕНИЙ ПАРАМЕТРОВ НАПРАВЛЕННОСТИ АНТЕНН | 2019 |
|
RU2704393C1 |
| US 10067172 B1, 04.09.2018 | |||
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ НАПРАВЛЕННОСТИ АНТЕННЫ С ПОМОЩЬЮ БПЛА МЕТОДОМ ОБЛЕТА | 2016 |
|
RU2626561C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ МЕТОДОМ ОБЛЕТА | 2024 |
|
RU2822401C1 |
| Статья: "Решение задачи планирования полета в реальном режиме времени малогабаритного беспилотного летательного аппарата по пространственной траектории в условиях сложного рельефа местности", Ж | |||
| Машиностроение и компьютерные технологии, | |||

