Изобретение относится к космической технике и может использоваться при выполнении в космосе операций сближения, облета, зависания, причаливания со стыковкой космических аппаратов (КА), а также для позиционирования исполнительных механизмов при выполнении монтажно-сборочных работ и других операций с помощью робототехнических средств.
В качестве аналога взяты лазерные визуальные средства посадки, предложенные в ВМС США для посадки палубных летательных аппаратов (ЛА) на авианосец [1]. Разработано две лазерные системы, предназначенные для облегчения посадки палубных ЛА.
Лазерный указатель посадочного курса (Laser Centerline Localizer - LCL) позволяет выйти на посадочный курс на дистанции свыше 10 морских миль.
Лазеры, излучающие красный, зеленый и желтый цвет, помогают экипажу ЛА удерживать посадочный курс и глиссаду при посадке на палубу движущегося корабля. Для обозначения отклонения влево и вправо используются лазеры с разными длинами волн, непрерывным и модулированным излучением. Отклонению вправо соответствует зеленый цвет, влево - красный. При увеличении отклонения от курса зеленые и красные огни начинают вспыхивать. Частота вспышек возрастает при увеличении отклонения. При строгом выдерживании посадочного курса виден только огонь желтого цвета. Суммарная сила света составляет 500 кд.
Лазерные лучи видны в секторе 21,9°. На расстоянии 0,5 мили заходящий на авианосец ЛА выходит из зоны действия LCL и ориентируется по оптической системе посадки на линзах Френеля.
Лазерный индикатор глиссады (Laser Glideslope Indicator - LGD) позволяет экипажу ЛА выйти на глиссаду с расстояния в 10 миль. Также используются разные длины волн и модуляция излучения при значительном отклонении от глиссады. На расстоянии менее 0,5 мили LGD перестает различаться, и ориентировка производится по оптической системе посадки на линзах Френеля.
При правильном заходе на посадку пилот ЛА видит на авианосце два желтых огня: слева LCL и справа LGD. Точность определения курса по LCL лежит в пределах 0,25°, глиссада определяется LGD с точностью 0,1°.
Предельная дальность обнаружения LGD составляет 12 миль. Испытания показали, что эти устройства позволяют легко обнаружить малейшие отклонения при заходе на посадку и могут использоваться в палубной авиации.
Недостатком аналога является большое число источников излучения, что приводит к увеличению массы и габаритов аппаратуры, потребляемой ей мощности, а также непосредственное наблюдение оператором излучающих лазерных апертур, что требует тщательного расчета лазерной безопасности.
В качестве прототипа приняты разработанные для управления сближением и стыковкой КА механические мишени сближения [2].
Механическая мишень включает в себя основание (круглое или асимметричное) и выносной крест черного цвета с нанесенными белыми крестом и метками. Покрытия мишени производятся по специальной технологии, так как они должны длительное время сохранять оптические характеристики в течение космического полета. В качестве основного средства визуального контроля при сближении используются телекамеры или оптический визир.
По мишени (или мишенному комплексу) визуально определяется положение линии визирования активного КА при сближении относительно направления на пассивный КА по тангажу и рысканию, а также положение осей пассивного КА относительно активного по тангажу, рысканию и крену.
Углы активного КА определяются по смещению переднего креста мишени относительно перекрестия телекамеры или оптического визира, а углы пассивного КА - по смещению переднего креста относительно креста основания.
Большинство существующих мишеней требуют организации засветки во время выполнения режима причаливания. На ночной стороне орбиты мишень засвечивается фарой, установленной на активном КА.
На дневной стороне орбиты вводятся ограничения на положение Солнца относительно оси мишени, исключающие затенение корпусом как активного, так и пассивного КА и задающие минимальный угол засветки основания мишени.
Недостатками прототипа являются сложность и недостаточная точность определения взаимного углового положения КА на участке причаливания, обусловленные тем, что малым углам отклонения соответствует небольшой сдвиг креста мишени относительно ее основания, определение которого может быть затруднено, и серьезные ограничения по светотехническим условиям во время сближения.
Задачей изобретения является уменьшение суммарного угла рассогласования продольных осей активного и пассивного КА за счет увеличения точности определения углов отклонения пассивного КА от линии визирования в режиме ориентации, кроме того, снижаются требования к светотехническим условиям во время сближения, а именно не требуется организация засветки во время выполнения режима причаливания.
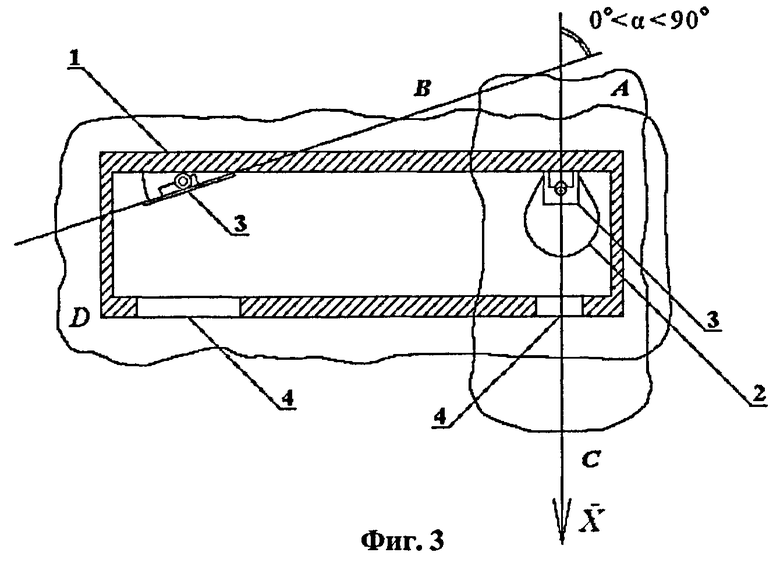
Задача решается с использованием устройства контроля ориентации пассивного КА, содержащего корпус, источник излучения и две плоские отражательные дифракционные решетки, причем плоскости А и В плоских дифракционных решеток перпендикулярны плоскостям С и D соответственно, пересекающимся под прямым углом на оси «
Таким образом, каждая плоская дифракционная решетка позволяет отдельно определять углы в плоскости тангажа или рысканья.
На Фиг.1-3 изображена конструкция предлагаемого устройства в трех проекциях, где:
1 - корпус;
2 - источник излучения;
3 - плоские дифракционные решетки;
4 - выходные отверстия.
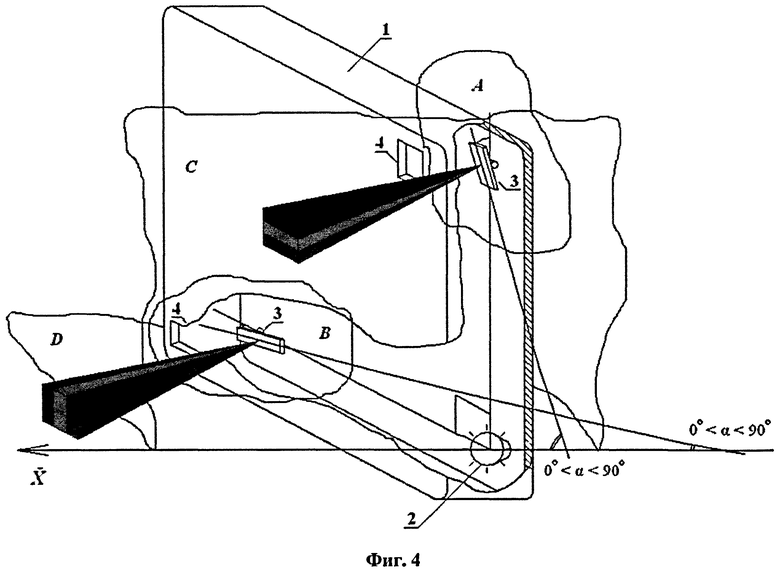
На Фиг.4 показана для пояснения конструкция в изометрии.
Корпус 1 обеспечивает защиту элементов конструкции от внешних воздействий факторов космического полета, а также служит для экранирования от наблюдателя источника излучения (имеющего большую яркость по сравнению с дифрагированными пучками излучения) и имеет выходные отверстия 4, служащие выходными апертурами для дифрагированного излучения.
Источник излучения 2 служит для получения оптического излучения с необходимыми параметрами.
Плоские дифракционные решетки 3 разлагают излучение источника 2 в спектр и являются индикаторами отклонения от линии визирования.
Выходные отверстия 4 предназначены для наблюдения дифрагированного излучения в заданном диапазоне углов.
Линия визирования плоской дифракционной решетки 3 совпадает с направлением, в котором находится максимум для длин волн 0,50-0,56 мкм (зеленый цвет). Отклонению от линии визирования соответствует сдвиг свечения в более коротко- или длинноволновую область (синюю или красную). Принцип ориентации заключается в поддержании направления, соответствующего зеленому свечению обоих плоских дифракционных решеток 3. На область зеленого света (0,50-0,56 мкм) также приходится максимум чувствительности человеческого глаза (0,38-0,76 мкм).
В варианте, представленном на Фиг.1-4, отклонению вправо соответствует красное свечение первой плоской дифракционной решетки 3, а отклонению влево - синее. Отклонение вверх соответствует синему свечению второй плоской дифракционной решетки 3, а вниз - красному.
При небольшом уходе влево зеленое свечение выходного отверстия 4 сменяется голубым, при увеличении угла - переходящим в синее, и при больших углах становится фиолетовым. Уход вправо обозначается сменой зеленого свечения на желтое, переходящее в оранжевое и сменяющееся красным. Каждому углу соответствует своя длина волны.
В отличие от механических мишеней, где для определения небольшого изменения пассивных углов необходимо обнаружить отклонение переднего креста относительно креста основания, в предлагаемом устройстве изменению угла соответствует изменение цвета, что облегчает определение углового рассогласования продольных осей активного и пассивного КА.
В качестве источника излучения 2 могут быть использованы лампы накаливания или светодиодные лампы с непрерывным спектром в видимой области.
При установке устройства на пассивный объект осуществляется привязка линий визирования плоских дифракционных решеток 3 к его строительным осям. Для точной юстировки в устройстве могут быть предусмотрены регулируемые крепления, на которых в корпусе установлены плоские дифракционные решетки 3.
Зона действия устройства определяется вблизи возможностью одновременного наблюдения двух выходных отверстий 4 без самопроизвольного изменения цвета, зависящей от длины базы - расстояния между плоскими дифракционными решетками 3.
Каждое из двух выходных отверстий 4 имеет свою линию визирования, которые параллельны друг другу, поэтому при одновременном их наблюдении возникает небольшой параллакс, увеличивающийся в ближней зоне. При сближении до определенной дистанции, определяемой длиной базы, параллакс возрастает, что вызывает заметное изменение цвета, затрудняющее ориентирование.
Максимальная дистанция ограничивается разрешающей способностью оптической или телевизионной системы, позволяющей раздельно наблюдать оба выходных отверстия 4, и также зависит от длины базы.
Решением этой проблемы является использование нескольких комплектов плоских дифракционных решеток 3 с разной длиной базы для ориентации в дальней и ближней зоне, либо совместное применение описываемого устройства с традиционной механической мишенью. Использование плоских дифракционных решеток не потребует увеличения энергопотребления (они используют лишь малую часть светового потока источника, и в принципе их количество ограничивается только возможностями правильного обнаружения и идентификации) и значительного усложнения конструкции.
Применение изобретения может позволить снизить нагрузки на стыковочные узлы и конструкции корпусов активного и пассивного КА при их стыковке за счет уменьшения суммарного углового рассогласования продольных осей активного и пассивного, КА по тангажу и рысканью, что достигается увеличением точности определения углов отклонения пассивного КА от линии визирования.
Устройство, описанное в настоящем изобретении, может также быть использовано для визуального контроля ориентации взаимодействующих изделий в промышленности, строительстве и областях техники, где требуется точный контроль взаимного положения взаимодействующих машин и механизмов. Кроме того, устройство может использоваться в авиации для визуального захода ЛА на посадку в условиях ограниченной видимости, дозаправки ЛА в полете с использованием системы штырь-конус и др. подобных задач.
Литература
1. Nordwall, Bruce D. Navy Tests Lasers To Help Carrier Pilots. Aviation Week & Space Technology, Nov. 19, 1990, pg.46.
2. Устройство контроля ориентации наблюдаемого объекта. Патент №2093432.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО КОНТРОЛЯ ОРИЕНТАЦИИ КОСМИЧЕСКИХ АППАРАТОВ ПРИ СБЛИЖЕНИИ | 2017 |
|
RU2662620C1 |
| УСТРОЙСТВО КОНТРОЛЯ ВЗАИМНОЙ ОРИЕНТАЦИИ КОСМИЧЕСКИХ АППАРАТОВ | 2019 |
|
RU2730393C1 |
| СПОСОБ ПОЛУАВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРИЧАЛИВАНИЕМ | 2015 |
|
RU2605231C1 |
| УСТРОЙСТВО КОНТРОЛЯ ВЗАИМНОГО ПОЛОЖЕНИЯ СБЛИЖАЮЩИХСЯ КОСМИЧЕСКИХ АППАРАТОВ | 2018 |
|
RU2694458C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА В НОЧНОЕ ВРЕМЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2238882C2 |
| Восьмицветная растровая оптическая система посадки | 2019 |
|
RU2743602C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРИЧАЛИВАНИЕМ | 1996 |
|
RU2104233C1 |
| Система посадки летательного аппарата на корабль с применением цифровых технологий | 2020 |
|
RU2734173C1 |
| Способ регулирования скорости сближения сервисного и обслуживаемого космических аппаратов при их стыковке | 2019 |
|
RU2742132C1 |
| УСТРОЙСТВО КОНТРОЛЯ ОРИЕНТАЦИИ НАБЛЮДАЕМОГО ОБЪЕКТА | 1993 |
|
RU2093432C1 |
Изобретение относится к космической технике и может быть использовано при выполнении в космосе операций сближения, облета, зависания, причаливания со стыковкой космических аппаратов (КА), в авиации для обеспечения посадки летательных аппаратов в условиях ограниченной видимости, а также для позиционирования исполнительных механизмов при выполнении монтажно-сборочных работ и других операций с помощью робототехнических средств. Устройство содержит корпус, источник излучения, плоские дифракционные решетки и выходные отверстия. Четыре плоскости плоских дифракционных решеток попарно перпендикулярны, две из них пересекаются под прямым углом на оси, проходящей через общий источник облучения и параллельной строительной оси пассивного КА, две остальные образуют с осью угол от 0° до 90°. Изобретение позволяет снизить нагрузки на стыковочные узлы и конструкции корпусов активного и пассивного КА при стыковке. 4 ил.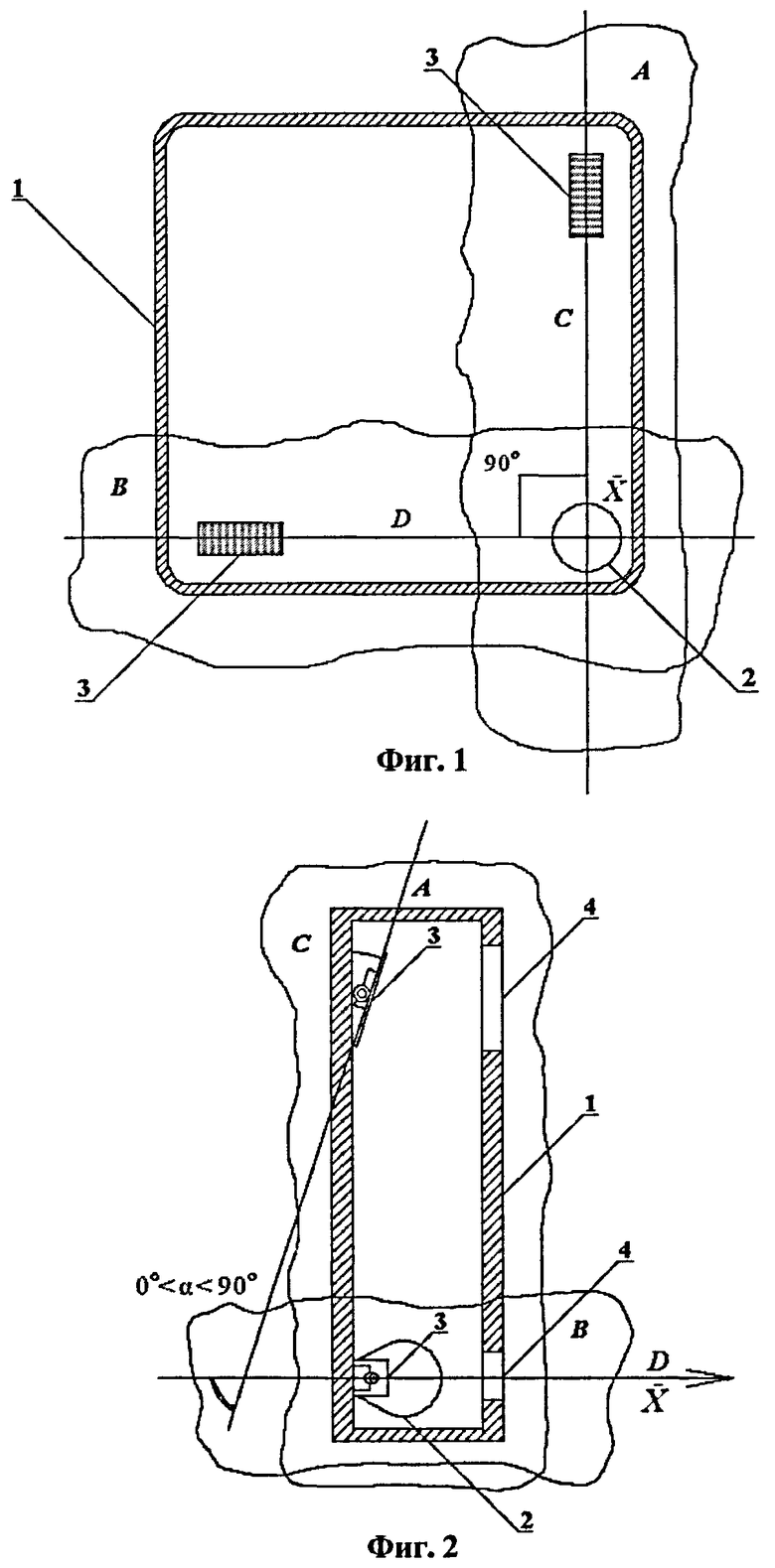
Устройство контроля ориентации пассивных космических аппаратов, содержащее корпус, источник излучения, плоские дифракционные решетки и выходные отверстия, отличающееся тем, что плоскости А и В плоских дифракционных решеток перпендикулярны плоскостям С и D соответственно, пересекающимися под прямым углом на оси 

| УСТРОЙСТВО КОНТРОЛЯ ОРИЕНТАЦИИ НАБЛЮДАЕМОГО ОБЪЕКТА | 1993 |
|
RU2093432C1 |
| US 6411871 B1, 25.06.2002 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И УГЛОВ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2378664C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КАЧКИ АВИАНОСЦА И МЕСТОПОЛОЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2408848C1 |

