Изобретение относится к области радиоавтоматики и может быть использовано в радиотехнических устройствах и системах связи различного назначения для повышения стабильности частот и синхронизации приемной и передающей аппаратуры.
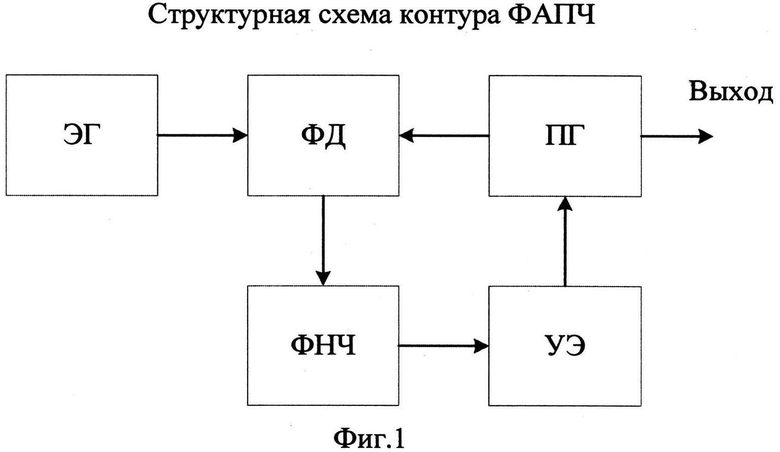
Известны различные модификации устройств контуров фазовой автоподстройки частоты (ФАПЧ) [1]. Все они представляют собой следящую систему автоматического регулирования с одним «входом», одним «выходом» и однопетлевой обратной связью, где объектом регулирования является подстраиваемый генератор. При построении таких систем основное внимание уделяют решению проблемы определения условий устойчивости требуемого режима, а также качественных характеристик процесса его установления. Наиболее близким по технической сущности к заявленному изобретению является устройство фазовой автоподстройки частоты (ФАПЧ) (фиг.1) [1, с.15], где ЭГ - эталонный генератор, УЭ - управляющий элемент, ПГ - подстраиваемый генератор, ФД - фазовый детектор, ФНЧ - фильтр нижних частот.
Однако проектирование мультиагентных систем требует минимизировать время вхождения в синхронизм (время захвата), что сложно обеспечить на основе использования известного устройства, и это определяет его недостаток.
Цель изобретения - уменьшить время захвата в сравнении с устройством ФАПЧ с однозвенным RC-фильтром. Указанный технический результат достигается за счет реализации устройства контура фазовой автоподстройки частоты с обратной связью на основе объединенного принципа максимума [2-5, 7], которое содержит следующие блоки: ЭГ; ПГ; блок формирования arcsin; блок формирования sign; блок формирования модуля; первый, второй, третий, четвертый, пятый, шестой, седьмой блоки формирования произведения; первый и второй блоки формирования суммы, RC-фильтр, интегрирующий масштабный преобразователь, блок формирования производной, форсирующее звено.
При этом в ЭГ, который является входом устройства, формируется значение наблюдаемой величины. Выход ЭГ соединен с первым входом первого блока формирования произведения, выход которого соединен с первым входом первого блока формирования суммы, выход которого соединен с входом RC-фильтра, первый выход которого соединен с входом интегрирующего масштабного преобразователя, выход которого соединен с входом ПГ, первый выход которого соединен со вторым входом первого блока формирования произведения; второй выход ПГ является выходом устройства. Второй выход RC-фильтра соединен с входом форсирующего звена, выход которого соединен с входом блока формирования arcsin, первый выход которого соединен с входом блока формирования производной, первый выход которого соединен с входом блока формирования модуля, выход которого соединен с первым входом второго блока формирования произведения, выход которого соединен с входом четвертого блока формирования произведения, выход которого соединен со вторым входом пятого блока формирования произведения, выход которого соединен с входом шестого блока формирования произведения, выход которого соединен со вторым входом второго блока формирования суммы, выход которого соединен с входом блока формирования sign, выход которого соединен с входом седьмого блока формирования произведения, выход которого соединен со вторым входом первого блока формирования суммы; второй выход блока формирования arcsin соединен с входом третьего блока формирования произведения, выход которого соединен с первым входом пятого блока формирования произведения; третий выход блока формирования arcsin соединен с первым входом второго блока формирования суммы.
Сущность изобретения поясняется чертежами, где на фиг.2 представлено устройство контура фазовой автоподстройки частоты с обратной связью на основе объединенного принципа максимума, которое содержит:
1 - ЭГ;
2 - первый блок формирования произведения;
3 - первый блок формирования суммы;
4 - RC-фильтр;
5 - интегрирующий масштабный преобразователь;
6 - ПГ;
7 - блок формирования arcsin;
8 - блок формирования производной;
9 - блок формирования модуля;
10 - второй блок формирования произведения;
11 - третий блок формирования произведения;
12 - четвертый блок формирования произведения;
13 - пятый блок формирования произведения;
14 - шестой блок формирования произведения;
15 - второй блок формирования суммы;
16 - блок формирования sign;
17 - седьмой блок формирования произведения;
18 - форсирующее звено.
Пояснить работу устройства позволяют следующие математические выкладки.
Рассматривается голономная управляемая динамическая система, интеграл действия которой имеет вид [6]

где 

Потребуем, чтобы при движении системы из начального состояния

в конечное состояние

под действием управления u выполнялось соотношение, аналогичное принципу Гамильтона-Остроградского для интеграла действия (1)

где знак δ′ - бесконечно малая величина, зависящая от вектора вариаций обобщенных координат, но не являющаяся вариацией величины А [6]
Отметим, что данное требование позволяет утверждать, что справедливы уравнения Лагранжа второго рода, которые для голономной системы можно записать в виде [3]

Пусть задана скалярная непрерывная вместе с частными производными на всей области определения знакопостоянная функция 


при условиях (2), (3), (4) и ограничении

где 

Рассмотрим расширенный функционал следующего вида:

где λ - множитель Лагранжа. Пусть 

δJ≥0
для любых допустимых вариаций δu.
Введем в рассмотрение функцию 

где Vs=δ′F/δqs. По физическому смыслу она представляет мощность действительных обобщенных сил 



где Ω - некоторая ограниченная в пространстве непрерывных на конечном интервале времени [0, t1] функций область, которая представляет собой множество решений уравнения (5). Ограниченность Ω следует из непрерывной зависимости решения уравнения (5) от управления.
Выбрав произвольное управление 



Пусть фазовая траектория 



Теорема [2, 3, 4]. Если управление 


Построение корректирующей петли авторегулирования ФАПЧ на основе объединенного принципа максимума (ОПМ). В [1] представлена структурная схема простейшей системы ФАПЧ, включающая фазовый дискриминатор, петлевой фильтр, подстраиваемый генератор, крутизна характеристики которого определяет полосу удержания Ωy.
Выбирая в качестве петлевого фильтра однозвенный RC-фильтр, получим нелинейное дифференциальное уравнение, описывающее систему ФАПЧ [1, с.21]

Здесь φ(t)=φc(t)-φ0(t) - разница фаз сигнала и подстраиваемого генератора; F(φ) - выход фазового дискриминатора, 
Рассмотрим задачу поиска 

из начальной произвольной точки фазового пространства 

Это математическая формулировка задачи синхронизации.
В соответствии с (9) и полученным на основе объединенного принципа максимума результата (13), анализ условия максимума функции 

где λ-1 - неопределенный множитель Лагранжа, L - константа, зависящая от формы линии переключения, ε и D - константы, определяющие соответственно сдвиг линий переключения и диаметр эллипса в фазовом пространстве состояний ФАПЧ. Тогда структура ФАПЧ ОПМ определяется уравнением [7]:

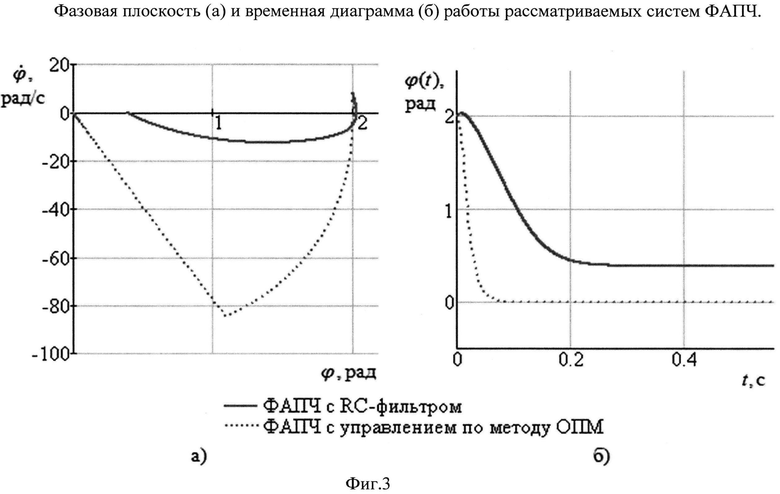
В ходе численного эксперимента получены решения дифференциальных уравнений, описывающих динамику системы ФАПЧ с RC-фильтром (15) и системы ФАПЧ с петлей авторегулирования, полученной на основе метода ОПМ (18). Моделирование проведено для следующих значений параметров: Т=0,014 с; Ωy=21 рад/с; |U|=5; λ-1=1; ε=0,001; D=1; L=4. Уравнение фазового дискриминатора имеет вид
F(φ)=sin(φ).
На фиг.3 демонстрируется процесс захвата на временной диаграмме (а) и фазовой плоскости (б).
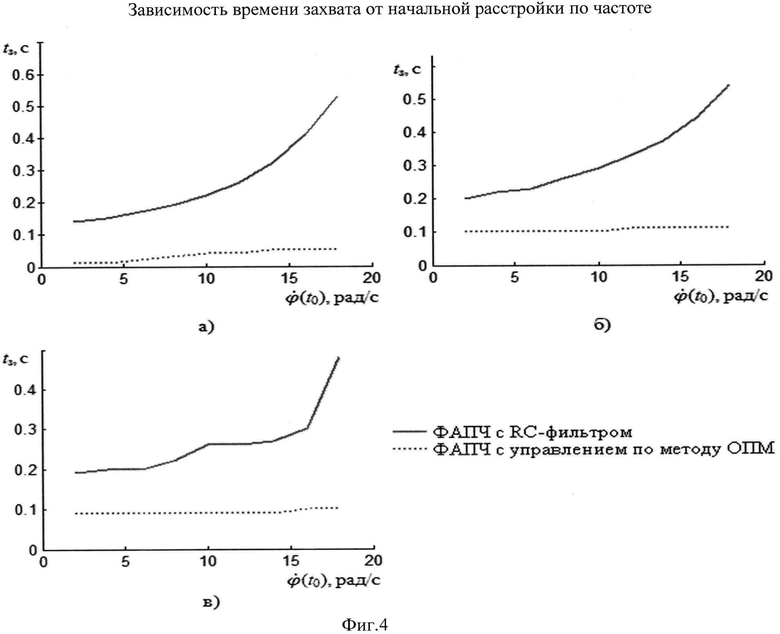
На фиг.4 представлены зависимости времени захвата tз для рассматриваемых систем ФАПЧ от начальной расстройки по частоте 
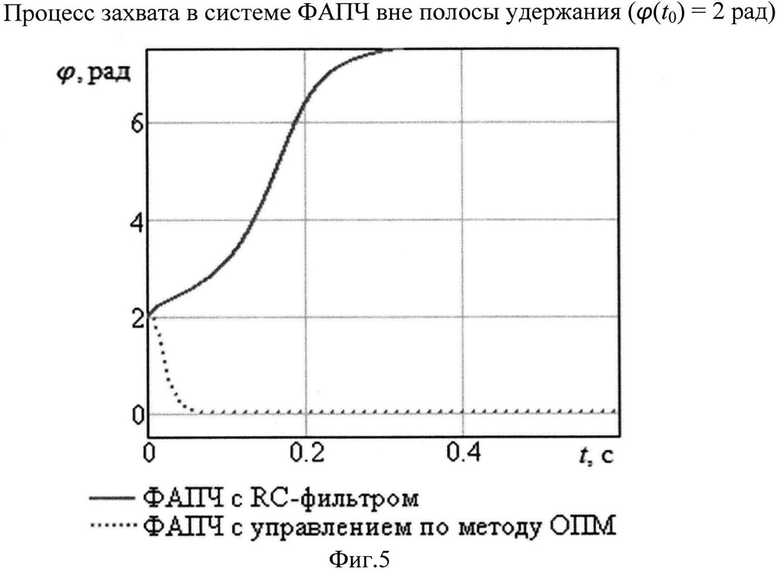
Приведенные результаты показывают, что время захвата для ФАПЧ с управлением по методу ОПМ примерно в 2-6 раз меньше и практически не зависит от начальных условий. Для данной ФАПЧ в режиме удержания установившееся значение разности фаз φy=0, в отличие от ФАПЧ с RC-фильтром, для которой φy=arcsin(ωн/Ωy)+2πk. Кроме того для ФАПЧ ОПМ наблюдается захват при превышении начальной расстройки по частоте полосы удержания системы ФАПЧ с RC-фильтром, в которой возникают биения (фиг.5).
Таким образом, разработанная система ФАПЧ с корректирующим нелинейным элементом, построенным на основе объединенного принципа максимума, позволяет в несколько раз уменьшить время захвата в сравнении с ФАПЧ с однозвенным RC-фильтром.
Устройство работает следующим образом.
В исходном состоянии эталонный генератор формирует сигнал с фазой φЭГ, который поступает на первый вход первого блока формирования произведения, на второй вход которого поступает сигнал от подстраиваемого генератора с фазой φПГ, на выходе которого формируется спектр сигнала с компонентой sinφ=sin(φЭГ-φПГ) и поступает на первый вход первого блока формирования суммы, на второй вход которого поступает сигнал обратной связи 







На входе устройства действует сигнал ЭГ, а с выхода устройства снимается сигнал подстраиваемого генератора, при этом работа устройства продолжается до момента сведения к нулю значения φ.
Источники информации
1. Шахгильдян В.В., Ляховский А.А. Системы фазовой автоподстройки частоты. М.: Связь. 1972. 447 с.
2. Костоглотов А.А., Костоглотов А.И., Лазаренко С.В. Объединенный принцип максимума в информационных технологиях анализа и синтеза: Монография. Ростов-на-Дону: РАС ЮРГУЭС. 2010. 165 с.
3. Андрашитов Д.С., Костоглотов А.А., Лазаренко С.В., Дерябкин И.В. Вариационный метод многопараметрической идентификации динамических систем на основе итерационной регуляризации // Успехи современной радиоэлектроники. 2012. №6. С.67-72.
4. Андрашитов Д.С., Костоглотов А.А., Костоглотов А.И., Лазаренко С.В. Методы многопараметрической идентификации динамических систем на основе объединенного принципа максимума: Монография. Ростов-на-Дону, ЮРГУЭС, 2011 г., 105 с.
5. Костоглотов А.А., Костоглотов А.И., Лазаренко С.В., Кузнецов А.А. Синтез оптимального регулятора на основе использования физических принципов // Нелинейный мир. 2012. №11. С.819-824.
6. Лурье А.И. Аналитическая механика. М.: Гос. изд. физ. - мат. лит., 1961, с.642-648.
7. Костоглотов А.А., Малый В.А., Понкратов А.И., Приймаков С.Н., Чеботарев А.В. Система фазовой автоподстройки частоты в режиме захвата с корректирующей петлей авторегулирования // Успехи современной радиоэлектроники. 2013. №8. С.32-36.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВОССТАНОВЛЕНИЯ НЕСУЩЕЙ ЧАСТОТЫ ФАЗОМАНИПУЛИРОВАННОГО СИГНАЛА И СЛЕЖЕНИЯ ЗА НЕЙ | 2012 |
|
RU2510145C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ БОРТОВЫХ СИСТЕМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ПО РЕЗУЛЬТАТАМ ОЦЕНКИ ПАРАМЕТРОВ | 2013 |
|
RU2544765C1 |
| Устройство синхронизации с нечетким контроллером | 2023 |
|
RU2810551C1 |
| СПОСОБ РАДИОПРИЕМА ВЫСОКОСКОРОСТНОЙ ИНФОРМАЦИИ КОСМИЧЕСКОЙ РАДИОЛИНИИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2530322C1 |
| ФАЗОВЫЙ СПОСОБ ПЕЛЕНГАЦИИ И ФАЗОВЫЙ ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2518428C2 |
| СПОСОБ ВРЕМЯИМПУЛЬСНОГО ПРЕОБРАЗОВАНИЯ ПОСТОЯННОГО НАПРЯЖЕНИЯ В КОД И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1989 |
|
RU2015618C1 |
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЧЕЛОВЕКА, ТЕРПЯЩЕГО БЕДСТВИЕ НА ВОДЕ | 2012 |
|
RU2521456C1 |
| СПОСОБ ОБНАРУЖЕНИЯ РАДИОЭЛЕКТРОННЫХ СРЕДСТВ | 2012 |
|
RU2497285C1 |
| Устройство фазовой автоподстройки частоты с индикацией синхронизма | 1988 |
|
SU1617637A1 |
| СПОСОБ ДЛЯ ОПРЕДЕЛЕНИЯ РАБОЧИХ ПАРАМЕТРОВ ФАЗОВОЙ АВТОПОДСТРОЙКИ ЧАСТОТЫ ГЕНЕРАТОРА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2449463C1 |
Изобретение относится к области радиоавтоматики и может быть использовано в радиотехнических устройствах и системах связи различного назначения для повышения стабильности частот и синхронизации приемной и передающей аппаратуры. Достигаемый технический результат - уменьшение времени захвата в сравнении с устройством фазовой автоподстройки с однозвенным RC-фильтром. Устройство содержит эталонный генератор, перестраиваемый генератор, блок формирования arcsin сигнала; блок формирования sign сигнала; блок формирования модуля; первый, второй, третий, четвертый, пятый, шестой, седьмой блоки формирования произведения; первый и второй блоки формирования суммы, RC-фильтр, интегрирующий масштабный преобразователь, блок формирования производной и форсирующее звено. 4 ил.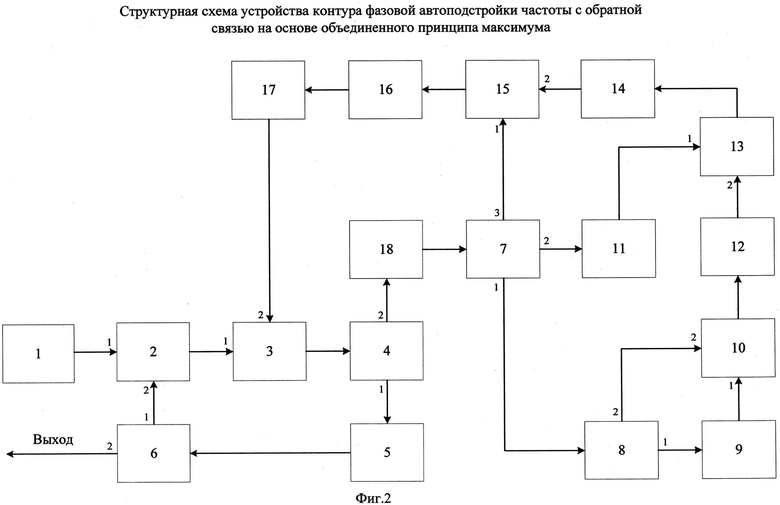
Устройство контура фазовой автоподстройки частоты с обратной связью на основе объединенного принципа максимума, содержащее блок эталонного генератора, блок подстраиваемого генератора, первый блок формирования произведения, RC-фильтр, интегрирующий масштабный преобразователь, отличающееся тем, что в устройство введены блок формирования arcsin, блок формирования sign, блок формирования модуля, блок формирования производной, второй, третий, четвертый, пятый, шестой, седьмой блоки формирования произведения, первый и второй блоки формирования суммы, форсирующее звено, при этом выход первого блока формирования произведения соединен с первым входом первого блока формирования суммы, выход которого соединен с входом RC-фильтра, первый выход которого соединен с входом интегрирующего масштабного преобразователя, выход которого соединен с входом подстраиваемого генератора, первый выход которого соединен со вторым входом первого блока формирования произведения; второй выход подстраиваемого генератора является выходом устройства; второй выход RC-фильтра соединен с входом форсирующего звена, выход которого соединен с входом блока формирования arcsin, первый выход которого соединен с входом блока формирования производной, первый выход которого соединен с входом блока формирования модуля, выход которого соединен с первым входом второго блока формирования произведения, выход которого соединен с входом четвертого блока формирования произведения, выход которого соединен с входом пятого блока формирования произведения, выход которого соединен с входом шестого блока формирования произведения, выход которого соединен со вторым входом второго блока формирования суммы, выход которого соединен с входом блока формирования sign сигнала, выход которого соединен с входом седьмого блока формирования произведения, выход которого соединен со вторым входом первого блока формирования суммы; второй выход блока формирования arcsin сигнала соединен с входом третьего блока формирования произведения, выход которого соединен с первым входом пятого блока формирования произведения; третий выход блока формирования arcsin сигнала соединен с первым входом второго блока формирования суммы.
| Способ нанесения на металлическую поверхность изоляционного слоя из крошеной пробки | 1953 |
|
SU103995A1 |

