Изобретение относится к авиации и предназначено для определения пространственного перемещения вертолета относительно земли на этапе посадки, служит для систем автоматического управления посадкой вертолета.
Известен способ определения ориентации подвижного объекта по координатам реперных источников (РИ), включающий определение сигналов, соответствующих положению изображения РИ в плоскости фотодетектора, определение углов пеленгов каждого РИ по полученным сигналам с учетом фокусного расстояния объктива и определение координат РИ по данным углов-пеленгов с учетом расстояния между точками [1].
Этот способ реализован в устройстве, содержащем реперные источники на подвижном объекте, а на неподвижном - два фотоприемных оптико-локационных блока и блок определения координат РИ и ориентации подвижного объекта [2].
Недостатком описанного аналога является применение прецизионного механического сканирования, наличие двух оптико-локационных блоков и реперных источников с известным расположением на подвижном объекте.
Известны наиболее близкие к заявляемому изобретению способ и устройство, описанные в патенте РФ №2275652 и относящиеся к системам дистанционного определения ориентации подвижных объектов. Способ основан на определении углов-пеленгов, координат реперных источников с помощью двух оптико-локационных блоков, каждый из которых содержит сканирующее зеркало, объектив и фотоприемник, и по полученным значениям - определении ориентации подвижного объекта. Повышение точности измерения координат источников излучения достигается за счет учета изменения расстояния между оптико-локационными блоками.
Устройство, реализующее этот способ, оснащено двумя оптико-локационными блоками, соединенными с блоком определения углов-пеленгов источников излучения, соединенным с блоком определения координат источников излучения, и блоком определения смещения точек отсчета углов-пеленгов, которые представляют собой вычислительные устройства, блок ввода и хранения данных расстояния между оптико-локационными блоками и сумматор.
Недостатком этого устройства является значительный вес и стоимость из-за применения прецизионного механического сканирования, наличие двух оптико-локационных боков и реперных источников с известным расположением на подвижном объекте.
Задачей изобретения является расширение возможностей при определении поступательного пространственного перемещения вертолета на посадке по углам-пеленгам трех идентичных точек с неизвестным расположением на поверхности земли (не доступных для соответствующих измерений), с использованием одного оптического блока.
Технический результат изобретения достигается тем, что в способе определения пространственного перемещения вертолета на посадке, основанном на определении углов-пеленгов источников излучения с помощью оптического блока и вычислительных устройств, углы пеленги идентичных точек определяют путем программной обработки изображений земной поверхности из двух последовательных положений вертолета, для чего используют блок приемника изображений земной поверхности, вычисляют матрицу направляющих косинусов и коэффициенты системы уравнений, решают систему линейных уравнений, посредством чего определяют три компоненты поступательного перемещения вертолета, при этом взаимное расположение идентичных точек неизвестно.
Программная обработка изображения земной поверхности с целью нахождения идентичных точек может осуществляться методами, описанными в [1], например, с использованием оконтуривания изображения и дальнейшего выделения в нем точек излома контура. Применение цветного изображения позволяет решать эту задачу еще более простыми приемами, например выделение пикселей (или групп пикселей) с определенным соотношением интенсивностей цветовых компонент.
Способ реализуется в устройстве для определения поступательного перемещения вертолета, содержащем оптический блок и вычислительные устройства, причем оптический блок представляет собой блок приемника изображений земной поверхности, содержащий матричный фотоприемник, размещенный в фокальной плоскости объектива, соединенный с вычислителем, содержащим модуль обработки изображения земной поверхности, где производится программная обработка изображения с целью определения углов-пеленгов трех идентичных точек, модуль вычисления матрицы направляющих косинусов и коэффициентов системы уравнений, где производится вычисление упомянутых коэффициентов на основании значений углов, измеряемых инерциальной навигационной системой, модуль вычисления компонентов поступательного перемещения вертолета, где производится решение системы линейных уравнений и вычисление трех компонентов поступательного пространственного перемещения вертолета, при этом модуль обработки изображений земной поверхности своим входом связан с фотоматрицей, а выходом - с первым входом модуля вычисления матрицы направляющих косинусов и коэффициентов системы уравнений, второй вход которого связан с инерциальной навигационной системой, а выход связан с входом модуля вычисления компонентов поступательного перемещения вертолета.
На фиг.1 показана схема размещения двух положений фотоматрицы в процессе определения пространственного перемещения вертолета и одна из трех идентичных точек Р, на фиг.2 - структурная схема устройства для определения пространственного перемещения ЛА.
Способ реализуется следующим образом. Прямоугольная система координат OXYZ (фиг.1) связана с первым положением вертолета, фотоматрица расположена в плоскости OYZ, а оптическая ось объектива совпадает с осью ОХ. Система координат O1X1Y1Z1 связана с вторым положением вертолета. Идентичная точка земной поверхности находится в точке Р. Центр фотоматрицы расположен в начале координат О (O1 - его второе положение). В точке F (F1) располагается геометрический центр объектива, формирующего оптическое изображение S (S1) идентичной точки земной поверхности Р.
Производится фотоэкспонирование изображений земной поверхности на фотоматрице из двух положений вертолета. Определяются координаты изображений идентичной точки Р на фотоматрице из этих положений. Положение системы координат O1X1Y1Z1 относительно системы OXYZ задается вектором смещения начала координат r0, обусловленного движением вертолета, а изменение углового положения системы O1X1Y1Z1 - матрицей направляющих косинусов А.
Двумя способами выражают вектор ОР и приравнивают правые части этих выражений

Выражают следующие вектора



где Мx и Mx1 - проекции векторов М и M1 на оси ОХ и O1X1,
ijk и i1j1k1 - единичные орты в системах координат OXYZ и O1X1Y1Z1,
F=OF=O1F1 - фокусное расстояние объектива.
Два первых соотношения следуют из подобия пар треугольников OSF SPD и O1S1F1, S1PD1.
Переписывают последнее векторное равенство (1) с учетом полученных выражений

Единичные орты i1, j1, k1 и i, j, k связаны между собой известным соотношением

где aij - элементы матрицы направляющих косинусов А.

где a, b, с - углы поворота вертолета по осям OX, OY, OZ соответственно. Подставляя выражения для ортов (3) в векторное соотношение (2) и проецируя на OX, OY и OZ, получают
Величины Мx, Mx1 являются промежуточными, в их определении нет необходимости, поэтому система уравнений упрощается следующим образом. Выражают Мx из первого уравнения и подставляют это выражение во второе и третье уравнения. В процессе упрощения уравнений (4) используют также следующие обозначения:



Анализ полученного уравнения показывает, что в него вошли три неизвестные величины βx, βy, βz (x01, y01, z01) и три угловые величины а, b, с, измеряемые инерциальной навигационной системой (ИНС), которые однозначно определяют коэффициенты матрицы направляющих косинусов. Определение трех величин βx, βy, βz составляет цель поставленной задачи. Кроме неизвестных величин, в уравнение (5) вошла известная константа F и измеряемые посредством фотоматриц величины αy, αz и αy1, αz1.
Таким образом, для разрешимости поставленной задачи необходимо составить по крайней мере три уравнения. Для предотвращения линейной зависимости этих уравнений и последующих проблем с их численным решением используют три точки на земной поверхности, не лежащие на одной прямой. Для каждой из трех точек записывают уравнение, аналогичное уравнению (5).

где i=1...3.
Упрощают полученную систему уравнений. Для этого вводят следующие обозначения:
Вычисляют значения коэффициентов Вi x, Вi y, Вi z (i=1...3), используя соотношения (7), тогда система уравнений (6) принимает вид:

Уравнения решают относительно βx, βy, βz, используя следующие соотношения
Вычисляют компоненты поступательного перемещения ЛА по формулам:
x01=Fβx; y01=Fβy; z01=Fβz.
Таким образом, решение задачи об определении перемещения вертолета относительно земли основано на измерении координат изображений трех идентичных точек земной поверхности, не лежащих на одной прямой, полученных из двух точек траектории вертолета, и вычислении на основе этих измерений его пространственного перемещения.
Устройство для определения пространственного перемещения вертолета на посадке (фиг.2) содержит блок приемника изображений земной поверхности 1, включающий объектив 3 и фотоматрицу 4, вычислитель 2, включающий в себя модуль анализа изображений земной поверхности 5, модуль 6 вычисления матрицы направляющих косинусов и коэффициентов системы уравнений, модуль 7 вычисления компонентов поступательного перемещения вертолета.
Устройство работает следующим образом.
Изображения земной поверхности проецируются объективом 3 на фотоматрице 4. В модуле 5 обработки изображений земной поверхности определяются координаты идентичных точек изображений, которые поступают в модуль 6 вычисления матрицы направляющих косинусов и коэффициентов системы уравнений, в который также поступают сигналы из ИНС, где формируются численные значения коэффициентов системы уравнений, а затем в модуле 7 вычисления компонентов поступательного перемещения вертолета производится решение системы линейных уравнений (8) и вычисление трех компонентов поступательного перемещения вертолета.
Для повышения точности определения пространственного перемещения вертолета используются прецизионные датчики информации и вычислитель с необходимой разрядностью.
Источники информации
1. Техническое зрение роботов. Под общ. ред. Ю.Г.Якушенкова. - М.: Машиностроение, 1990. - c.168.
2. Патент на изобретение GB №2002986 А, опубл. 28.02.1979.
3. Патент РФ на изобретение RU №2275652 С2, G01S 5/16, опубл. 27.04.2006, бюл. №12 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ И УГЛОВ ОТКЛОНЕНИЯ УПРАВЛЯЮЩИХ ПОВЕРХНОСТЕЙ ВЕДУЩЕГО САМОЛЕТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2349931C1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2438142C2 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ МЕРЦАЮЩЕЙ ПОДВИЖНОЙ ТОЧКИ ЗЕМНОЙ ПОВЕРХНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2368920C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НЕРОВНОСТЕЙ ПОВЕРХНОСТИ АВТОДОРОГИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2402037C1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2401436C2 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ МЕРЦАЮЩЕЙ ТОЧКИ ЗЕМНОЙ ПОВЕРХНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2383032C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И УГЛОВ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2378664C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ ОТ ЛЕТАТЕЛЬНОГО АППАРАТА ДО ВЕКТОРА ОТНОСИТЕЛЬНОЙ СКОРОСТИ ПРЕПЯТСТВИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2326406C1 |
| СПОСОБ ДЛЯ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С ПРЕПЯТСТВИЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2325705C1 |
| СПОСОБ ГРУППОВОЙ ВИДЕОНАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2021 |
|
RU2758285C1 |
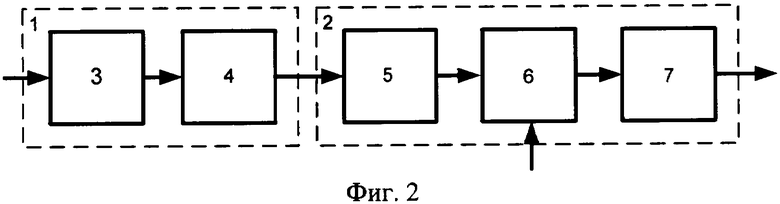
Изобретение относится к области приборостроения и может быть использовано для систем автоматического управления вертолетом на этапе посадки (висения). Технический результат - расширение функциональных возможностей. Для достижения данного результата определяют углы-пеленги трех идентичных точек на двух последовательных углах-пеленгах на двух последовательных изображениях земной поверхности. Эти измерения осуществляют с двух последовательных положений вертолета при помощи матричного фотоприемника, размещенного в фокальной плоскости объектива. При этом устройство для реализации способа содержит блок приемника изображений земной поверхности 1, в который входят объектив 3 и фотоматрица 4, вычислитель 2, включающий в себя модуль (5) обработки изображений земной поверхности. В модуле (7) вычисления компонентов поступательного перемещения вертолета производится решение системы линейных уравнений (8) и вычисление трех компонентов пространственного перемещения вертолета. 2 н.п. ф-лы, 2 ил.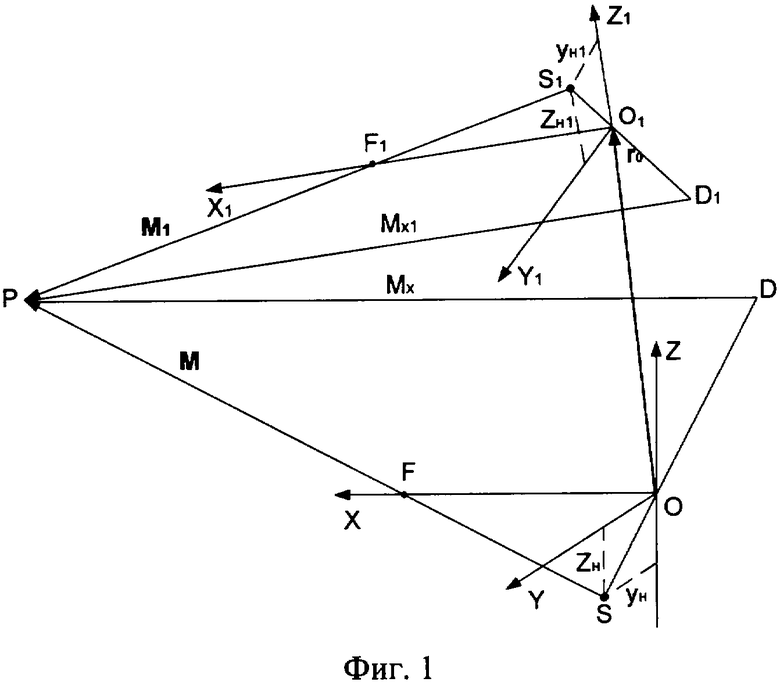
| СПОСОБ ЛОКАЦИИ ИСТОЧНИКА ИЗЛУЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2275652C2 |
| Устройство корреляционного зрения робота | 1990 |
|
SU1770120A1 |
| УСТРОЙСТВО ДЛЯ РАСПОЗНАВАНИЯ ОБЪЕКТОВ ПО ИХ КОНТУРАМ | 1990 |
|
RU2090927C1 |
| Техническое зрение роботов | |||
| / Под общ | |||
| ред | |||
| Ю.Г.Якушенкова | |||
| - М.: Машиностроение, 1990, с.168 | |||
| СПОСОБ ИЗМЕРЕНИЯ ПОВЕРХНОСТИ ОБЪЕКТА | 1994 |
|
RU2085839C1 |
| Хорн Б.К.П | |||
| Зрение роботов | |||
| - М.: Мир, 1989, с.487 | |||
| СПОСОБ АВТОМАТИЗИРОВАННОГО ИЗМЕРЕНИЯ КООРДИНАТ ТОЧЕК ВНЕШНЕЙ СРЕДЫ ДЛЯ ПОСТРОЕНИЯ ЕЕ ТРЕХМЕРНОЙ МОДЕЛИ В СТЕРЕОТЕЛЕВИЗИОННОЙ СИСТЕМЕ ТЕХНИЧЕСКОГО ЗРЕНИЯ | 1993 |
|
RU2065133C1 |

