Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к бесконтактному зарядному устройству.
[0002] Данная заявка основана и притязает на приоритет заявки на патент Японии № 2010-290133, поданной 27 декабря 2010 года, содержимое которой полностью содержится в данном документе в качестве части описания по ссылке в указанных странах, в которых санкционировано включение документов по ссылке.
Уровень техники
[0003] Известна зарядная система, включающая в себя зарядное устройство, предварительно установленное около позиции остановки транспортного средства и выполненное с возможностью заряжать аккумулятор, установленный на транспортном средстве, когда транспортное средство остановлено в предварительно определенной позиции; мобильный модуль, носимый водителем транспортного средства и имеющий функцию связи; модуль связи на стороне транспортного средства, установленный на транспортном средстве и выполненный с возможностью обмениваться данными с мобильным модулем; и модуль управления зарядом аккумулятора, установленный на транспортном средстве и выполненный с возможностью начинать процесс заряда аккумулятора, когда выполняется определение в отношении того, что водитель отходит от транспортного средства, или завершать процесс заряда аккумулятора, когда выполняется определение в отношении того, что водитель приближается к транспортному средству, на основе результатов, полученных посредством модуля связи на стороне транспортного средства, обменивающегося данными с мобильным модулем, при этом аккумулятор заряжается посредством передачи и приема электрической мощности посредством электромагнитной связи между модулем приема мощности транспортного средства и модулем подведения мощности зарядного устройства при поддержании бесконтактного состояния между ними (см. патентный документ 1).
Список библиографических ссылок
Патентные документы
[0004] Патентный документ 1. Публикация заявки на патент Японии номер 2009-089452
Сущность изобретения
Техническая задача
[0005] Тем не менее не выполняется определение в отношении того, является ли или нет процесс заряда возможным, на основе позиции модуля приема мощности и позиции модуля подведения мощности, и, следовательно, пользователь не может видеть, до какой степени смещение позиции модуля подведения мощности относительно позиции модуля приема мощности является допустимым, что, в свою очередь, приводит к проблеме неудобства для пользователя транспортного средства.
[0006] Цель настоящего изобретения заключается в том, чтобы предоставить бесконтактное зарядное устройство, которое достигает повышения удобства пользователя.
Решение задачи
[0007] Чтобы разрешить вышеприведенную проблему, настоящее изобретение предоставляет бесконтактное зарядное устройство, включающее в себя модуль определения состояния заряда для определения состояния заряда аккумулятора и модуль задания допустимого диапазона для процесса заряда для задания допустимого диапазона для процесса заряда, указывающего диапазон позиций катушки для передачи мощности, согласно состоянию заряда, определенному посредством модуля определения состояния заряда.
Преимущества изобретения
[0008] Согласно настоящему изобретению, допустимый диапазон для процесса заряда задается согласно состоянию заряда, или время процесса заряда вычисляется согласно состоянию заряда и позиции катушки для передачи мощности, и за счет этого, например, когда состояние заряда является высоким, величина электрической мощности, требуемая для процесса заряда, является небольшой, и, следовательно, допустимый диапазон для процесса заряда задается соответствующим образом широким, и тем самым диапазон, в котором разрешено смещение позиции катушки для передачи мощности, может быть расширен, или, например, даже когда время процесса заряда является большим вследствие смещения позиции катушки для передачи мощности, пользователь может проверять время процесса заряда и выполнять определение для того, чтобы начинать процесс заряда, и, как результат, может быть повышено удобство пользователя.
Краткое описание чертежей
[0009] Фиг. 1 является блок-схемой бесконтактной зарядной системы согласно варианту осуществления настоящего изобретения.
Фиг. 2 является структурной схемой контроллера аккумулятора и электронного модуля управления, проиллюстрированных на фиг. 1.
Фиг. 3A является видом сверху и видами в перспективе, иллюстрирующими катушку для передачи мощности и катушку для приема мощности по фиг. 1, обращенные друг к другу.
Фиг. 3B является видом сверху и видами в перспективе, иллюстрирующими катушку для передачи мощности и катушку для приема мощности по фиг. 1, обращенные друг к другу, иллюстрирующими катушки как смещенные друг от друга в направлении по оси X.
Фиг. 4 иллюстрирует характеристики принимаемой мощности для катушки 1B для приема мощности в направлении по оси X (или направлении по оси Y) и направлении по оси Z, проиллюстрированном на фиг. 3A и 3B.
Фиг. 5A является графиком, иллюстрирующим характеристики мощности процесса заряда для аккумулятора 5 относительно времени процесса заряда на фиг. 1, иллюстрирующим характеристики в случае процесса заряда в состоянии, в котором электрическая мощность, принимаемая посредством катушки для приема мощности, составляет 3,0 кВт.
Фиг. 5B является графиком, иллюстрирующим характеристики мощности процесса заряда для аккумулятора 5 относительно времени процесса заряда на фиг. 1, иллюстрирующим характеристики в случае процесса заряда в состоянии, в котором электрическая мощность, принимаемая посредством катушки для приема мощности, составляет 1,5 кВт.
Фиг. 6A является графиком, иллюстрирующим характеристики мощности процесса заряда для аккумулятора 5 относительно времени процесса заряда на фиг. 1, иллюстрирующим характеристики в случае процесса заряда в состоянии, в котором электрическая мощность, принимаемая посредством катушки для приема мощности, составляет 3,0 кВт.
Фиг. 6B является графиком, иллюстрирующим характеристики мощности процесса заряда для аккумулятора 5 относительно времени процесса заряда на фиг. 1, иллюстрирующим характеристики в случае процесса заряда в состоянии, в котором электрическая мощность, принимаемая посредством катушки для приема мощности, составляет 1,5 кВт.
Фиг. 7 является видом для помощи при пояснении допустимого диапазона для процесса заряда, заданного посредством модуля задания допустимого диапазона для процесса заряда, проиллюстрированного на фиг. 2.
Фиг. 8 является блок-схемой последовательности операций способа, иллюстрирующей управляющую процедуру бесконтактной зарядной системы, проиллюстрированной на фиг. 1.
Фиг. 9 является структурной схемой контроллера аккумулятора и электронного модуля управления бесконтактной зарядной системы согласно другому варианту осуществления настоящего изобретения.
Фиг. 10 является блок-схемой последовательности операций способа, иллюстрирующей управляющую процедуру бесконтактной зарядной системы, проиллюстрированной на фиг. 9.
Фиг. 11 является структурной схемой контроллера аккумулятора и электронного модуля управления бесконтактной зарядной системы согласно еще одному другому варианту осуществления настоящего изобретения.
Фиг. 12 является блок-схемой последовательности операций способа, иллюстрирующей управляющую процедуру бесконтактной зарядной системы, проиллюстрированной на фиг. 11.
Фиг. 13 является структурной схемой контроллера аккумулятора и электронного модуля управления бесконтактной зарядной системы согласно дополнительному варианту осуществления настоящего изобретения.
Фиг. 14 является блок-схемой последовательности операций способа, иллюстрирующей управляющую процедуру бесконтактной зарядной системы, проиллюстрированной на фиг. 13.
Фиг. 15 является структурной схемой контроллера аккумулятора и электронного модуля управления бесконтактной зарядной системы согласно дополнительному варианту осуществления настоящего изобретения.
Фиг. 16 является блок-схемой последовательности операций способа, иллюстрирующей управляющую процедуру бесконтактной зарядной системы, проиллюстрированной на фиг. 15.
Подробное описание вариантов осуществления
[0010] Бесконтактные зарядные устройства согласно вариантам осуществления настоящего изобретения описываются ниже со ссылкой на чертежи.
[0011] Первый вариант осуществления
Фиг. 1 является блок-схемой, иллюстрирующей бесконтактную зарядную систему, к которой применяется один вариант осуществления настоящего изобретения, и система включает в себя модуль 100 на стороне земли и модуль 200 на стороне транспортного средства и имеет такую конфигурацию, в которой модуль 100 на стороне земли, установленный в станции подведения мощности и т.п., обеспечивает бесконтактную подачу мощности в такую нагрузку, как аккумулятор 5 модуля 200 на стороне транспортного средства, установленного на транспортном средстве и т.п., чтобы за счет этого заряжать аккумулятор 5. В первом варианте осуществления в качестве примера ниже описывается бесконтактное зарядное устройство, включающее в себя бесконтактную зарядную систему как установленную на зарядном устройстве, предоставляемом в электромобиле и в месте для парковки для транспортного средства; тем не менее, бесконтактное зарядное устройство, включающее в себя бесконтактную зарядную систему по первому варианту осуществления, может предоставляться в транспортном средстве, отличном от электромобиля, или может предоставляться не только в транспортном средстве.
[0012] Модуль 100 на стороне земли включает в себя катушку 1A для передачи мощности, электрическую схему 2A на стороне земли, электронный модуль 3 управления (ECU), коммерческий внешний источник 4 питания и устройство 8A связи на стороне земли. Коммерческий внешний источник 4 питания подает мощность переменного тока в электрическую схему 2A на стороне земли. Электрическая схема 2A на стороне земли представляет собой схему, включающую в себя выпрямитель, преобразователь мощности, резонансную схему и т.п., и преобразует мощность переменного тока, передаваемую из коммерческого внешнего источника 4 питания, в переменную волну мощности переменного тока и передает преобразованную мощность переменного тока в катушку 1A для передачи мощности. Катушка 1A для передачи мощности передает высокочастотную мощность в катушку 1B для приема мощности посредством действия электромагнитной индукции с катушками, находящимися в бесконтактном состоянии. Катушка 1A для передачи мощности предоставляется в месте для парковки на парковке, в которой предоставляется бесконтактная зарядная система по первому варианту осуществления. Когда транспортное средство, содержащее модуль 200 на стороне транспортного средства, паркуется в месте для парковки, катушка 1A для передачи мощности находится под катушкой 1B для приема мощности при поддержании расстояния от катушки 1B для приема мощности. ECU 3 представляет собой контроллер для управления всем модулем 100 на стороне земли и управляет электрической схемой 2A на стороне земли, например, чтобы начинать и завершать передачу электрической мощности из катушки 1A для передачи мощности в катушку 1B для приема мощности и за счет этого регулировать электрическую мощность, которая должна быть передана из катушки 1A для передачи мощности. Устройство 8A связи на стороне земли обменивается данными с устройством 8B связи на стороне транспортного средства, чтобы за счет этого передавать время передачи мощности, передаваемую мощность и т.п. в модуль 200 на стороне транспортного средства согласно управляющему сигналу из ECU 3. Кроме того, устройство 8A связи на стороне земли передает позицию катушки 1A для передачи мощности в модуль 200 на стороне транспортного средства.
[0013] Модуль 200 на стороне транспортного средства включает в себя катушку 1B для приема мощности, электрическую схему 2B на стороне транспортного средства, аккумулятор 5, электронный модуль 7 управления (ECU), контроллер 6 аккумулятора (BC) и устройство 8B связи на стороне транспортного средства. Катушка 1B для приема мощности представляет собой катушку, которая принимает высокочастотную мощность, передаваемую из катушки 1A для передачи мощности посредством действия электромагнитной индукции с катушками, находящимися в бесконтактном состоянии, и предоставляется на нижней поверхности (или на ходовой части) и т.п. транспортного средства, содержащего модуль 200 на стороне транспортного средства. Электрическая схема 2B на стороне транспортного средства представляет собой схему, включающую в себя резонансную схему, выпрямитель, соединительный блок (J/B) и т.п., и преобразует электрическую мощность, передаваемую из катушки 1B для приема мощности, и подает электрическую мощность в аккумулятор 5, чтобы за счет этого заряжать аккумулятор 5. Другими словами, электрическая схема 2B на стороне транспортного средства имеет функцию зарядного устройства для заряда аккумулятора 5. Аккумулятор 5 представляет собой аккумулятор, сформированный из соединения нескольких аккумуляторных батарей, и служит в качестве источника мощности для транспортного средства, содержащего модуль 200 на стороне транспортного средства. BC 6 представляет собой контроллер для управления аккумулятором 5 и определяет состояние заряда (SOC) аккумулятора 5, оставшуюся емкость аккумулятора 5 и т.п. ECU 7 представляет собой контроллер для выполнения централизованного управления для катушки 1B для приема мощности, электрической схемы 2B на стороне транспортного средства и BC 6 и управляет электрической схемой 2B на стороне транспортного средства, чтобы управлять зарядом аккумулятора 5 согласно состоянию аккумулятора 5, управляемого посредством BC 6. Устройство 8B связи на стороне транспортного средства обменивается данными с устройством 8A связи на стороне земли, чтобы за счет этого принимать информацию позиции, указывающую позицию катушки 1A для передачи мощности, информацию относительно электрической мощности, передаваемой из катушки 1A для передачи мощности, и т.п. и передает принимаемую информацию в ECU 7.
[0014] Далее описываются конфигурации BC 6 и ECU 7 со ссылкой на фиг. 2. Фиг. 2 является блок-схемой, иллюстрирующей конфигурации BC 6 и ECU 7. BC 6 включает в себя модуль 601 определения состояния заряда. Модуль 601 определения состояния заряда определяет SOC аккумулятора 5. SOC имеет корреляцию с напряжением аккумулятора 5, и, следовательно, модуль 601 определения состояния заряда может определять SOC аккумулятора 5 посредством определения напряжения аккумулятора 5. Информация относительно SOC аккумулятора 5, определенного посредством модуля 601 определения состояния заряда, передается в ECU 7.
[0015] ECU 7 включает в себя модуль 701 задания допустимого диапазона для процесса заряда, модуль 702 определения, модуль 703 уведомления о результатах определения и модуль 704 управления зарядом. Модуль 701 задания допустимого диапазона для процесса заряда задает допустимый диапазон для процесса заряда согласно SOC, определенному посредством модуля 601 определения состояния заряда. Допустимый диапазон для процесса заряда указывает диапазон позиций катушки 1A для передачи мощности относительно позиции катушки 1B для приема мощности, в которой разрешен процесс заряда аккумулятора 5. Катушка 1A для передачи мощности предоставляется в модуле 100 на стороне земли, а катушка 1B для приема мощности предоставляется в модуле 200 на стороне транспортного средства, и, следовательно, позиция катушки 1A для передачи мощности относительно позиции катушки 1B для приема мощности варьируется согласно припаркованной позиции транспортного средства. В первом варианте осуществления допустимый диапазон для процесса заряда задается как критерий для относительных позиций катушек, в которых разрешен процесс заряда аккумулятора 5, когда транспортное средство паркуется в месте для парковки, как описано ниже.
[0016] Модуль 702 определения определяет то, разрешен или нет процесс заряда аккумулятора 5, согласно позиции катушки 1A для передачи мощности относительно позиции катушки 1B для приема мощности. В припаркованной позиции транспортного средства процесс заряда разрешен, если позиция катушки 1A для передачи мощности попадает в допустимый диапазон для процесса заряда, или процесс заряда не разрешен, если позиция катушки 1A для передачи мощности выходит за пределы допустимого диапазона для процесса заряда. Модуль 703 уведомления о результатах определения уведомляет пользователя относительно результатов, определенных посредством модуля 702 определения, например, посредством навигационной системы (не проиллюстрирована), предоставляемой на приборной панели, либо посредством речи и т.п.
[0017] Для заряда аккумулятора 5 здесь оптимальная мощность для заряда предварительно устанавливается согласно SOC и задается так, что она становится меньшей по мере того, как SOC приближается к полному заряду. Затем BC 6, который управляет SOC аккумулятора 5, выполняет запрос в модуль 704 управления зарядом на предмет необходимой мощности для заряда на основе предварительно установленного режима заряда. Затем модуль 704 управления зарядом управляет электрической мощностью, которую электрическая схема 2B на стороне транспортного средства выводит в аккумулятор 5 во время процесса заряда аккумулятора 5, согласно мощности, запрашиваемой посредством BC 6, чтобы тем самым уменьшать пошаговым образом выходную мощность из электрической схемы 2B на стороне транспортного средства по мере того, как значение SOC аккумулятора 5 становится более высоким, тем самым ограничивая мощность процесса заряда для аккумулятора 5. В частности, под управлением модуля 704 управления зарядом, процесс заряда аккумулятора 5 посредством зарядного устройства электрической схемы 2B на стороне транспортного средства выполняется, например, посредством режима заряда, который начинается с процесса заряда при неизменяющемся постоянном токе и переключается на процесс заряда при многоступенчатом постоянном токе или процесс заряда при многоступенчатом постоянном напряжении.
[0018] Далее приводится описание со ссылкой на фиг. 3 и 4 относительно того факта, что электрическая мощность, принимаемая посредством катушки 1B для приема мощности, варьируется согласно относительным позициям катушки 1A для передачи мощности и катушки 1B для приема мощности. Фиг. 3A и 3B иллюстрируют при виде сверху a) и при видах в перспективе b), c), катушку 1A для передачи мощности и катушку 1B для приема мощности, обращенные друг к другу. На фиг. 3A и 3B ось X и ось Y указывают двумерные направления катушки 1A для передачи мощности и катушки 1B для приема мощности, и ось Z указывает их направление высоты. В этой связи как катушка 1A для передачи мощности, так и катушка 1B для приема мощности имеют идентичную круглую форму для целей описания; тем не менее, в первом варианте осуществления катушка 1A для передачи мощности и катушка 1B для приема мощности не должны обязательно иметь круглую форму и не должны иметь идентичную форму.
[0019] Теперь, когда катушка 1A для передачи мощности предоставляется на земле, а катушка 1B для приема мощности установлена на транспортном средстве, как проиллюстрировано на фиг. 3A, желательно, чтобы транспортное средство парковалось в месте для парковки таким образом, что катушка 1B для приема мощности совпадает с катушкой 1A для передачи мощности в направлениях по оси X и оси Y в качестве двумерных направлений; тем не менее, как проиллюстрировано на фиг. 3B, относительные позиции катушки 1A для передачи мощности и катушки 1B для приема мощности могут быть смещены друг от друга в двумерных направлениях, в зависимости от навыков водителя. Кроме того, высота транспортного средства варьируется согласно типу транспортного средства или величине нагрузки, и, следовательно, расстояние между катушкой 1A для передачи мощности и катушкой 1B для приема мощности в направлении Z высоты варьируется также согласно высоте транспортного средства.
[0020] Если постоянная электрическая мощность подается из электрической схемы 2A на стороне земли в катушку 1A для передачи мощности, эффективность приема электрической мощности посредством катушки 1B для приема мощности является наибольшей, когда катушка 1B для приема мощности находится в позиции, совпадающей с катушкой 1A для передачи мощности (которая соответствует позиции, проиллюстрированной на фиг. 3A), тогда как эффективность является низкой, когда точка центра катушки 1B для приема мощности находится далеко от точки центра катушки 1A для передачи мощности.
[0021] Фиг. 4 иллюстрирует характеристики принимаемой мощности для катушки 1B для приема мощности в направлении по оси X (или направлении по оси Y) и направлении по оси Z, проиллюстрированном на фиг. 3A и 3B. В этой связи электрическая мощность, поданная из электрической схемы 2A на стороне земли в катушку 1A для передачи мощности, как предполагается, является постоянной. Как проиллюстрировано на фиг. 4, увеличение расстояния между катушкой 1A для передачи мощности и катушкой 1B для приема мощности в направлении оси Z без изменений позиций катушки 1A для передачи мощности и катушкой 1B для приема мощности приводит к широкому зазору между катушкой 1A для передачи мощности и катушкой 1B для приема мощности, и, следовательно, к снижению электрической мощности, принимаемой посредством катушки 1B для приема мощности.
[0022] Катушка 1B для приема мощности крепится к транспортному средству, и расстояние между катушкой 1B для приема мощности и катушкой 1A для передачи мощности в направлении по оси Z задается фиксированным образом, равным расстоянию (Z1) в направлении по оси Z без существенного изменения относительно припаркованной позиции транспортного средства. Если расстояние в направлении по оси Z задано фиксированным образом, равным Z1, пунктирная линия на фиг. 4 указывает максимальную мощность, принимаемую посредством катушки 1B для приема мощности. Когда катушка 1A для передачи мощности и катушка 1B для приема мощности находятся в позициях, обращенных друг к другу под прямым углом без смещения позиции между точкой центра катушки 1A для передачи мощности и точкой центра катушки 1B для приема мощности в двумерных направлениях (что соответствует фиг. 3A), максимальная мощность, принимаемая посредством катушки 1B для приема мощности, составляет 3,0 кВт (указывается в точке A на фиг. 4). Когда расстояние между катушкой 1A для передачи мощности и катушкой 1B для приема мощности в направлении по оси X становится X1 посредством смещения точки центра катушки 1B для приема мощности от точки центра катушки 1A для передачи мощности в направлении по оси X (или направлении по оси Y) (что соответствует фиг. 3B), максимальная мощность, принимаемая посредством катушки 1B для приема мощности, снижается до 1,5 кВт (указывается в точке B на фиг. 4). Когда расстояние между катушкой 1A для передачи мощности и катушкой 1B для приема мощности в направлении по оси X становится X2 посредством дополнительного смещения точки центра катушки 1B для приема мощности от точки центра катушки 1A для передачи мощности в направлении по оси X (или направлении по оси Y), электрическая мощность, принимаемая посредством катушки 1B для приема мощности, дополнительно снижается до 1,0 кВт (указывается в точке C на фиг. 4).
[0023] Далее приводится описание со ссылкой на фиг. 5 относительно электрической мощности, принимаемой посредством катушки 1B для приема мощности, и времени процесса заряда для аккумулятора 5. Фиг. 5A и 5B являются графиками, иллюстрирующими характеристики мощности процесса заряда для аккумулятора 5 относительно времени процесса заряда, и фиг. 5A иллюстрирует характеристики в случае процесса заряда в состоянии, в котором электрическая мощность, принимаемая посредством катушки 1B для приема мощности, составляет 3,0 кВт, а фиг. 5B иллюстрирует характеристики в случае процесса заряда в состоянии, в котором электрическая мощность, принимаемая посредством катушки 1B для приема мощности, составляет 1,5 кВт. Процесс заряда начинается с состояния, в котором SOC аккумулятора 5 составляет 10%, и процесс заряда заканчивается в момент, когда SOC аккумулятора 5 достигает 100%. Зарядные характеристики, проиллюстрированные на фиг. 5A, указывают характеристики в случае, если в относительных позициях катушек, проиллюстрированных на фиг. 3A, процесс заряда осуществляется при электрической мощности, указываемой в точке A на фиг. 4, а зарядные характеристики, проиллюстрированные на фиг. 5B, указывают характеристики в случае, если в относительных позициях катушек, проиллюстрированных на фиг. 3B, процесс заряда осуществляется при электрической мощности, указываемой в точке B на фиг. 4.
[0024] Кроме того, модуль 704 управления зарядом заряжает аккумулятор 5 посредством задания мощности процесса заряда для аккумулятора 5, равной 3,0 кВт, до того, как SOC аккумулятора 5 достигает 80%, затем уменьшения мощности процесса заряда для аккумулятора 5 до 2,5 кВт, когда SOC аккумулятора 5 достигает 80%, затем уменьшения мощности процесса заряда для аккумулятора 5 до 1,5 кВт, когда SOC аккумулятора 5 достигает 90%, затем уменьшения мощности процесса заряда для аккумулятора 5 до 1,2 кВт, когда SOC аккумулятора 5 достигает 94%, затем уменьшения мощности процесса заряда для аккумулятора 5 до 1,0 кВт, когда SOC аккумулятора 5 достигает 96%, и затем уменьшения мощности процесса заряда для аккумулятора 5 до 0,8 кВт, когда SOC аккумулятора 5 достигает 98%.
[0025] Как проиллюстрировано на фиг. 5A, когда процесс заряда начинается с состояния, в котором SOC составляет 10% в состоянии, в котором максимальная мощность, принимаемая посредством катушки 1B для приема мощности, составляет 3,0 кВт, модуль 704 управления зарядом задает максимальную мощность (3,0 кВт), принятую посредством катушки 1B для приема мощности, в качестве мощности процесса заряда и подает мощность процесса заряда в аккумулятор 5, чтобы заряжать аккумулятор 5, и уменьшает мощность процесса заряда пошаговым образом согласно SOC при вышеописанном управлении зарядом. Что касается времени процесса заряда, время, требуемое для увеличения SOC от 10% до 80%, составляет 6 часов, время, требуемое для увеличения SOC от 80% до 90%, составляет 0,5 часа, время, требуемое для увеличения SOC от 90% до 94%, составляет 0,5 часа, время, требуемое для увеличения SOC от 94% до 96%, составляет 0,5 часа, время, требуемое для увеличения SOC от 96% до 98%, составляет 0,5 часа, и время, требуемое для увеличения SOC от 98% до 100%, составляет 0,5 часа. В таком случае время процесса заряда, требуемое для заряда до полного заряда, начиная с состояния, в котором SOC аккумулятора 5 составляет 10%, составляет 8,5 часов (=6+0,5+0,5+0,5+0,5+0,5).
[0026] Между тем, как проиллюстрировано на фиг. 5B, когда процесс заряда начинается с состояния, в котором SOC составляет 10% в состоянии, в котором максимальная мощность, принимаемая посредством катушки 1B для приема мощности, составляет 1,5 кВт, модуль 704 управления зарядом задает максимальную мощность (1,5 кВт), принятую посредством катушки 1B для приема мощности, в качестве мощности процесса заряда и подает мощность процесса заряда в аккумулятор 5, чтобы заряжать аккумулятор 5. Как описано выше, аккумулятор 5 первого варианта осуществления может быть заряжен посредством 1,5 кВт или более мощности до тех пор, пока SOC не достигнет 94%. В позициях катушек, проиллюстрированных на фиг. 3B, тем не менее, максимальная мощность, принимаемая посредством катушки 1B для приема мощности, составляет 1,5 кВт, и, следовательно, мощность процесса заряда задается равной 1,5 кВт для заряда до тех пор, пока SOC аккумулятора 5 не достигнет 94%, и мощность процесса заряда уменьшается пошаговым образом таким же образом, как описано выше, после времени, когда SOC аккумулятора 5 достигло 94%.
[0027] Что касается времени процесса заряда, время, требуемое для увеличения SOC от 10% до 80%, составляет 12 часов, время, требуемое для увеличения SOC от 80% до 90%, составляет 0,835 часа, время, требуемое для увеличения SOC от 90% до 94%, составляет 0,5 часа, время, требуемое для увеличения SOC от 94% до 96%, составляет 0,5 часа, время, требуемое для увеличения SOC от 96% до 98%, составляет 0,5 часа, и время, требуемое для увеличения SOC от 98% до 100%, составляет 0,5 часа. В таком случае время процесса заряда, требуемое для заряда до полного заряда, начиная с состояния, в котором SOC аккумулятора 5 составляет 10%, составляет 14,835 часов (=12+0,835+0,5+0,5+0,5+0,5).
[0028] Другими словами, в позициях катушек, проиллюстрированных на фиг. 3B, максимальная мощность, принимаемая посредством катушки 1B для приема мощности, меньше, и, следовательно, время процесса заряда для заряда до полного заряда, начиная с состояния, в котором SOC составляет 10%, больше по сравнению с позициями катушек, проиллюстрированными на фиг. 3A.
[0029] Далее приводится описание со ссылкой на фиг. 6 относительно электрической мощности, принимаемой посредством катушки 1B для приема мощности, и времени процесса заряда для аккумулятора 5. Фиг. 6 отличается от фиг. 5 тем, что процесс заряда начинается в момент, когда SOC составляет 90%. Фиг. 6A и 6B являются графиками, иллюстрирующими характеристики мощности процесса заряда для аккумулятора 5 относительно времени процесса заряда, и фиг. 6A иллюстрирует характеристики в случае процесса заряда в состоянии, в котором электрическая мощность, принимаемая посредством катушки 1B для приема мощности, составляет 3,0 кВт, а фиг. 6B иллюстрирует характеристики в случае процесса заряда в состоянии, в котором электрическая мощность, принимаемая посредством катушки 1B для приема мощности, составляет 1,5 кВт. Зарядные характеристики, проиллюстрированные на фиг. 6A, указывают характеристики в случае, если в относительных позициях катушек, проиллюстрированных на фиг. 3A, процесс заряда осуществляется при электрической мощности, указываемой в точке A на фиг. 4, а зарядные характеристики, проиллюстрированные на фиг. 6B, указывают характеристики в случае, если в относительных позициях катушек, проиллюстрированных на фиг. 3B, процесс заряда осуществляется при электрической мощности, указываемой в точке B на фиг. 4.
[0030] В примере, проиллюстрированном на фиг. 6, процесс заряда выполняется, начиная с состояния, в котором SOC аккумулятора 5 составляет 90%, и, следовательно, модуль 704 управления зарядом заряжает аккумулятор 5 посредством задания мощности процесса заряда для аккумулятора 5, равной 1,5 кВт, до того, как SOC аккумулятора 5 достигает 94%, затем уменьшения мощности процесса заряда для аккумулятора 5 до 1,2 кВт, когда SOC аккумулятора 5 достигает 94%, затем уменьшения мощности процесса заряда для аккумулятора 5 до 1,0 кВт, когда SOC аккумулятора 5 достигает 96%, и затем уменьшения мощности процесса заряда для аккумулятора 5 до 0,8 кВт, когда SOC аккумулятора 5 достигает 98%.
[0031] Как проиллюстрировано на фиг. 6A, когда процесс заряда начинается с состояния, в котором SOC составляет 90% в состоянии, в котором максимальная мощность, принимаемая посредством катушки 1B для приема мощности, составляет 3,0 кВт, модуль 704 управления зарядом ограничивает максимальную мощность (3,0 кВт), принятую посредством катушки 1B для приема мощности, мощностью процесса заряда (1,5 кВт) и подает мощность процесса заряда в аккумулятор 5, чтобы заряжать аккумулятор 5, и уменьшает мощность процесса заряда пошаговым образом согласно SOC при вышеописанном управлении зарядом. Что касается времени процесса заряда, время, требуемое для увеличения SOC от 90% до 94%, составляет 0,5 часа, время, требуемое для увеличения SOC от 94% до 96%, составляет 0,5 часа, время, требуемое для увеличения SOC от 96% до 98%, составляет 0,5 часа, и время, требуемое для увеличения SOC от 98% до 100%, составляет 0,5 часа. В таком случае время процесса заряда, требуемое для заряда до полного заряда, начиная с состояния, в котором SOC аккумулятора 5 составляет 90%, составляет 2,0 часа (=0,5+0,5+0,5+0,5).
[0032] Между тем, как проиллюстрировано на фиг. 6B, когда процесс заряда начинается с состояния, в котором SOC составляет 90% в состоянии, в котором максимальная мощность, принимаемая посредством катушки 1B для приема мощности, составляет 1,5 кВт, модуль 704 управления зарядом задает максимальную мощность (1,5 кВт), принятую посредством катушки 1B для приема мощности, в качестве мощности процесса заряда и подает мощность процесса заряда в аккумулятор 5, чтобы заряжать аккумулятор 5, и уменьшает мощность процесса заряда пошаговым образом согласно SOC при вышеописанном управлении зарядом. Что касается времени процесса заряда, время, требуемое для увеличения SOC от 90% до 94%, составляет 0,5 часа, время, требуемое для увеличения SOC от 94% до 96%, составляет 0,5 часа, время, требуемое для увеличения SOC от 96% до 98%, составляет 0,5 часа, и время, требуемое для увеличения SOC от 98% до 100%, составляет 0,5 часа. В таком случае время процесса заряда, требуемое для заряда до полного заряда, начиная с состояния, в котором SOC аккумулятора 5 составляет 90%, составляет 2,0 часа (=0,5+0,5+0,5+0,5).
[0033] В позициях катушек, проиллюстрированных на фиг. 3B, максимальная мощность, принимаемая посредством катушки 1B для приема мощности, меньше по сравнению с максимальной мощностью в позициях катушек, проиллюстрированных на фиг. 3A. Тем не менее, максимальная мощность, принимаемая посредством катушки 1B для приема мощности, равна или превышает максимальную мощность процесса заряда во время начала заряда аккумулятора 5, и, таким образом, время процесса заряда не варьируется даже при возникновении смещения позиции между катушками, как проиллюстрировано на фиг. 3B.
[0034] Другими словами, когда SOC находится близко к полному заряду, электрическая мощность, требуемая для заряда, может быть небольшой, как проиллюстрировано на фиг. 5 и 6, и, таким образом, смещение позиции между катушками является более приемлемым по мере того, как SOC приближается к полному заряду.
[0035] Далее описываются подробности управления в бесконтактной зарядной системе по первому варианту осуществления со ссылкой на фиг. 2 и 7. Фиг. 7 является схематичным видом для помощи при пояснении допустимого диапазона для процесса заряда и соответствует виду сверху катушки 1B для приема мощности.
[0036] Бесконтактная зарядная система по первому варианту осуществления работает во время парковки транспортного средства в месте для парковки, содержащем модуль 100 на стороне земли. Во-первых, модуль 601 определения состояния заряда определяет SOC аккумулятора 5 и передает информацию относительно определенного SOC в ECU 7. Затем модуль 701 задания допустимого диапазона для процесса заряда задает допустимый диапазон для процесса заряда согласно SOC аккумулятора 5 следующим образом. Модуль 701 задания допустимого диапазона для процесса заряда задает допустимый диапазон для процесса заряда вдоль направления главной поверхности катушки 1A для передачи мощности или катушки 1B для приема мощности. Допустимый диапазон для процесса заряда является виртуальным круговым диапазоном, центрированным вокруг катушки 1B для приема мощности, и является диапазоном для определения того, что процесс заряда разрешен, когда катушка 1A для передачи мощности находится в допустимом диапазоне для процесса заряда. Кроме того, допустимый диапазон для процесса заряда задается таким образом, что процесс заряда завершается в пределах предварительно допущенного времени процесса заряда. Как проиллюстрировано на фиг. 5B, даже когда существует большая величина смещения позиции между катушкой 1A для передачи мощности и катушкой 1B для приема мощности, процесс заряда аккумулятора 5 является возможным при условии, что катушка 1B для приема мощности находится в позиции, допускающей прием электрической мощности. Тем не менее процесс заряда до полного заряда, начиная с состояния, в котором SOC аккумулятора 5 является небольшим, требует большего времени процесса заряда. Следовательно, допустимый диапазон для процесса заряда задается согласно SOC аккумулятора 5 таким образом, что разрешенное смещение позиции между катушками является диапазоном в горизонтальном направлении (или в направлении, параллельном месту для парковки), так что процесс заряда завершается в пределах предварительно допущенного времени процесса заряда.
[0037] В частности, как проиллюстрировано на фиг. 7, модуль 701 задания допустимого диапазона для процесса заряда задает область (a) в качестве допустимого диапазона для процесса заряда, когда SOC аккумулятора 5 находится между 0% включительно и 80% исключительно, задает область (b) в качестве допустимого диапазона для процесса заряда, когда SOC аккумулятора 5 находится между 80% включительно и 90% исключительно, или задает область (с) в качестве допустимого диапазона для процесса заряда, когда SOC аккумулятора 5 равно или превышает 90%. Другими словами, модуль 701 задания допустимого диапазона для процесса заряда задает допустимый диапазон для процесса заряда шире по мере того, как SOC больше, и за счет этого, разрешенная величина смещения позиции между катушками больше по мере того, как SOC выше.
[0038] Когда допустимый диапазон для процесса заряда задается посредством модуля 701 задания допустимого диапазона для процесса заряда, ECU 7 использует систему помощи при парковке с использованием навигационной системы и установленной на транспортном средстве камеры (не проиллюстрирована), так чтобы отображать допустимый диапазон для процесса заряда на дисплее навигационной системы. Водитель транспортного средства может парковать транспортное средство в позиции, подходящей для заряда, посредством просмотра дисплея, чтобы регулировать позицию для парковки таким образом, что позиция катушки 1A для передачи мощности находится в допустимом диапазоне для процесса заряда.
[0039] Затем после того, как транспортное средство припарковано, ECU 7 определяет позицию катушки 1A для передачи мощности через устройства 8A, 8B связи. В этой связи в первом варианте осуществления позиция катушки 1A для передачи мощности определяется посредством связи между устройством 8A связи на стороне земли и устройством 8B связи на стороне транспортного средства; тем не менее, например, катушка 1A для передачи мощности или катушка 1B для приема мощности может содержать датчик позиции для определения. Альтернативно модуль 100 на стороне земли может содержать антенну для передачи сигналов, и модуль 200 на стороне транспортного средства может содержать приемное устройство таким образом, что позиция катушки определяется на основе состояния связи сигнала, передаваемого из антенны.
[0040] Когда позиция катушки 1A для передачи мощности определяется через устройства 8A, 8B связи, модуль 702 определения определяет то, находится или нет позиция катушки для передачи мощности в допустимом диапазоне для процесса заряда. Затем, когда позиция катушки для передачи мощности находится в допустимом диапазоне для процесса заряда, модуль 702 определения определяет то, что процесс заряда аккумулятора 5 является возможным. Когда модуль 702 определения определяет то, что процесс заряда разрешен, модуль 704 управления зарядом управляет электрической мощностью, принимаемой посредством катушки 1B для приема мощности, как мощностью процесса заряда, подходящей для заряда аккумулятора 5 согласно SOC, определенному посредством модуля 601 определения состояния заряда, и подает мощность процесса заряда в аккумулятор 5. Другими словами, когда электрическая мощность, принимаемая посредством катушки 1B для приема мощности, превышает мощность процесса заряда, подходящую для заряда, модуль 704 управления зарядом ограничивает принимаемую мощность мощностью процесса заряда, подходящей для заряда, и подает подходящую мощность процесса заряда в аккумулятор 5. Между тем, когда электрическая мощность, принимаемая посредством катушки 1B для приема мощности, меньше мощности процесса заряда, подходящей для заряда, модуль 704 управления зарядом задает электрическую мощность, принимаемую посредством катушки 1B для приема мощности, в качестве мощности процесса заряда и подает мощность процесса заряда в аккумулятор 5. Когда модуль 702 определения определяет то, что процесс заряда не разрешен, модуль 703 уведомления о результатах определения уведомляет водителя относительно определенных результатов и также может предоставлять уведомление водителю, чтобы заставлять его парковать транспортное средство снова.
[0041] Модуль 601 определения состояния заряда определяет SOC также в ходе заряда аккумулятора 5, и модуль 704 управления зарядом уменьшает мощность процесса заряда пошаговым образом по мере того, как SOC становится выше. Затем в момент, когда аккумулятор 5 достигает полного заряда, модуль 704 управления зарядом завершает подачу электрической мощности в аккумулятор 5. В силу этого аккумулятор 5 заряжается в бесконтактной зарядной системе по первому варианту осуществления.
[0042] Далее описывается управляющая процедура бесконтактной зарядной системы по первому варианту осуществления со ссылкой на фиг. 8. Фиг. 8 является блок-схемой последовательности операций способа, иллюстрирующей управляющую процедуру бесконтактной зарядной системы по первому варианту осуществления. Когда управление посредством бесконтактной зарядной системы по первому варианту осуществления начинается, на этапе S1 модуль 601 определения состояния заряда определяет SOC аккумулятора 5 и передает информацию относительно определенного SOC в ECU 7. На этапе S2 модуль 701 задания допустимого диапазона для процесса заряда задает допустимый диапазон для процесса заряда согласно определенному SOC. На этапе S3 ECU 7 определяет позицию катушки 1A для передачи мощности через устройство 8A связи на стороне земли и устройство 8B связи на стороне транспортного средства. В этой связи в бесконтактной зарядной системе по первому варианту осуществления, например, когда транспортное средство приближается к месту для парковки или когда парковка транспортного средства в месте для парковки начинается, устройство 8A связи на стороне земли может начинать обмен с устройства 8B связи на стороне транспортного средства, чтобы определять позицию катушки 1A для передачи мощности.
[0043] На этапе S4, модуль 702 определения определяет то, находится или нет позиция катушки 1A для передачи мощности в допустимом диапазоне для процесса заряда. Когда позиция катушки 1A для передачи мощности не находится в допустимом диапазоне для процесса заряда, модуль 702 определения определяет не разрешать заряд, и на этапе S401, модуль 703 уведомления о результатах определения предоставляет отображение для человека, находящегося в транспортном средстве, чтобы заставлять его парковать транспортное средство снова, чтобы за счет этого уведомлять человека, находящегося в транспортном средстве, относительно определенных результатов, указывающих, что процесс заряда не разрешен, и управление возвращается к этапу S1. Когда позиция катушки 1A для передачи мощности находится в допустимом диапазоне для процесса заряда, модуль 702 определения определяет разрешать заряд, и управление переходит к этапу S5.
[0044] На этапе S5 модуль 704 управления зарядом задает мощность процесса заряда согласно SOC аккумулятора 5 и электрической мощности, принимаемой посредством катушки 1B для приема мощности, и подает мощность процесса заряда в аккумулятор 5, чтобы за счет этого начинать процесс заряда аккумулятора 5. Кроме того, модуль 703 уведомления о результатах определения уведомляет человека, находящегося в транспортном средстве, относительно начала заряда, чтобы за счет этого уведомлять человека, находящегося в транспортном средстве, относительно определенных результатов, указывающих, что процесс заряда разрешен. Затем SOC аккумулятора 5 достигает состояния полного заряда, и управление посредством бесконтактной зарядной системы по первому варианту осуществления завершается.
[0045] Как описано выше, бесконтактное зарядное устройство по первому варианту осуществления включает в себя катушку 1B для приема мощности, электрическую схему 2B на стороне транспортного средства, аккумулятор 5, модуль 601 определения состояния заряда и модуль 701 задания допустимого диапазона для процесса заряда, и допустимый диапазон для процесса заряда, указывающий диапазон позиций катушки 1A для передачи мощности относительно позиции катушки 1B для приема мощности, в которой разрешен процесс заряда аккумулятора 5, задается согласно SOC. Смещение позиции между катушкой 1B для приема мощности и катушкой 1A для передачи мощности, которая разрешена для заряда аккумулятора 5, варьируется согласно SOC аккумулятора 5. В первом варианте осуществления допустимый диапазон для процесса заряда задается согласно SOC и тем самым диапазон, в котором разрешено смещение позиции, может быть определен; например, если смещение позиции между катушками выходит за пределы допустимого диапазона для процесса заряда, водитель может парковать транспортное средство таким образом, что смещение позиции между катушками попадает в допустимый диапазон для процесса заряда, и, следовательно, может быть повышено удобство пользователя. Кроме того, в первом варианте осуществления, например, когда допустимый диапазон для процесса заряда отображается на дисплее навигационной системы посредством использования системы помощи при парковке с использованием навигационной системы, водитель может регулировать позицию катушки 1B для приема мощности относительно позиции катушки 1A для передачи мощности в диапазоне, в котором процесс заряда аккумулятора 5 разрешен, посредством парковки транспортного средства при просмотре допустимого диапазона для процесса заряда. Как результат, бесконтактное зарядное устройство по первому варианту осуществления может повышать удобство пользователя.
[0046] Кроме того, в первом варианте осуществления модуль 701 задания допустимого диапазона для процесса заряда задает допустимый диапазон для процесса заряда шире по мере того, как SOC выше. Оптимальная мощность процесса заряда для заряда аккумулятора 5 с высоким SOC меньше мощности процесса заряда для аккумулятора 5 с низким SOC. Следовательно, когда SOC является высоким, электрическая мощность, принимаемая посредством катушки 1B для приема мощности, может быть небольшой, и, таким образом, диапазон, в котором разрешено смещение позиции между катушками, является широким. В первом варианте осуществления допустимый диапазон для процесса заряда задается шире по мере того, как SOC выше, и, таким образом, диапазон смещения позиции между катушками, который разрешен для заряда, может задаваться согласно SOC, и, как результат, может быть повышено удобство пользователя.
[0047] Кроме того, в первом варианте осуществления бесконтактное зарядное устройство включает в себя устройства 8A, 8B связи для определения позиции катушки для передачи мощности, модуль 702 определения и модуль 703 уведомления о результатах определения для предоставления уведомления относительно результатов, определенных посредством модуля 702 определения, и модуль 702 определения определяет то, что процесс заряда аккумулятора 5 разрешен, когда позиция катушки для передачи мощности находится в допустимом диапазоне для процесса заряда. В силу этого человек, находящийся в транспортном средстве, может видеть уведомление относительно определенных результатов, предоставляемых ему посредством модуля 703 уведомления о результатах определения так, чтобы проверять то, является или нет процесс заряда возможным в текущей припаркованной позиции транспортного средства. Кроме того, когда транспортное средство паркуется в позиции, не подходящей для заряда, в которой существует большая величина смещения позиции между катушками, уведомление из модуля 703 уведомления о результатах определения позволяет человеку, находящемуся в транспортном средстве, видеть неподходящую позицию, и, как результат, первый вариант осуществления может повышать удобство пользователя. Кроме того, когда транспортное средство паркуется в позиции, не подходящей для заряда, в которой существует большая величина смещения позиции между катушками, электрическая мощность, принимаемая посредством катушки 1B для приема мощности, является небольшой, и, следовательно, аккумулятор 5 не может быть полностью заряжен, или время процесса заряда для полного заряда аккумулятора 5 является большим. В первом варианте осуществления, когда транспортное средство находится в позиции, не подходящей для заряда, в которой существует большая величина смещения позиции между катушками, уведомление из модуля 703 уведомления о результатах определения позволяет человеку, находящемуся в транспортном средстве, видеть позицию, не подходящую для заряда, и, таким образом, человек, находящийся в транспортном средстве, может парковать транспортное средство снова таким образом, что транспортное средство находится в позиции, подходящей для заряда, и, как результат, может достигаться уменьшение времени процесса заряда.
[0048] В этой связи в первом варианте осуществления допустимый диапазон для процесса заряда имеет круглую форму; тем не менее, допустимый диапазон для процесса заряда не обязательно должен иметь круглую форму и может иметь прямоугольную форму. Кроме того, в первом варианте осуществления допустимый диапазон для процесса заряда является плоскостью в двух измерениях; тем не менее, трехмерная область может быть использована в качестве допустимого диапазона для процесса заряда.
[0049] Кроме того, в первом варианте осуществления допустимый диапазон для процесса заряда задается шире по мере того, как SOC выше, и, следовательно, как проиллюстрировано на фиг. 7, несколько допустимых диапазонов для процесса заряда задаются посредством использования SOC (80%) и SOC (90%) в качестве границ между диапазонами; тем не менее, не обязательно требуется, чтобы SOC (80%) и SOC (90%) использовались в качестве границ, и допустимый диапазон для процесса заряда может непрерывно варьироваться согласно SOC.
[0050] Кроме того, в этом варианте осуществления часть управления системы на стороне транспортного средства разделяется на BC 6 и ECU 7; тем не менее, BC 6 и ECU 7 могут быть сконфигурированы как один контроллер.
[0051] Кроме того, хотя допустимый диапазон для процесса заряда предварительно устанавливается таким образом, что процесс заряда завершается в пределах предварительно допущенного времени процесса заряда, степень допустимого диапазона для процесса заряда может задаваться согласно времени процесса заряда, требуемому человеком, находящимся в транспортном средстве. Например, когда водитель паркует транспортное средство и имеет много времени до дальнейшей поездки, время процесса заряда сможет задаваться большим. Кроме того, когда время процесса заряда может задаваться большим, электрическая мощность, принимаемая посредством катушки 1B для приема мощности, может задаваться небольшой, как проиллюстрировано на фиг. 5 и 6, и таким образом, допустимый диапазон для процесса заряда может задаваться широким. Другими словами, человек, находящийся в транспортном средстве, задает требуемое время процесса заряда, и модуль 701 задания допустимого диапазона для процесса заряда задает допустимый диапазон для процесса заряда широким, когда время процесса заряда является большим, или задает допустимый диапазон для процесса заряда узким, когда время процесса заряда является небольшим. В силу этого в первом варианте осуществления диапазон, в котором разрешено смещение позиции между катушками, может задаваться согласно времени процесса заряда, требуемому человеком, находящимся в транспортном средстве, и SOC, и, таким образом, может быть повышено удобство пользователя.
[0052] В этой связи в первом варианте осуществления электрическая схема 2B на стороне транспортного средства может иметь схему определения температуры, такую как терморезистор, чтобы определять температуру аккумулятора 5, и модуль 701 задания допустимого диапазона для процесса заряда может задавать допустимый диапазон для процесса заряда согласно определенной температуре аккумулятора 5. Кроме того, электрическая схема 2B на стороне транспортного средства может иметь схему определения температуры, такую как терморезистор, чтобы определять температуру в транспортном средстве, и модуль 701 задания допустимого диапазона для процесса заряда может задавать допустимый диапазон для процесса заряда согласно определенной температуре в транспортном средстве. В силу этого то, разрешен или нет заряд, может быть надлежащим образом определено согласно температуре аккумулятора 5 или температуре в транспортном средстве, и, таким образом, может быть повышено удобство пользователя.
[0053] Катушка 1B для приема мощности и электрическая схема 2B на стороне транспортного средства соответствуют "устройству приема мощности" настоящего изобретения; модуль 601 определения состояния заряда - "средству определения состояния заряда"; модуль 701 задания допустимого диапазона для процесса заряда - "средству задания допустимого диапазона для процесса заряда"; модуль 702 определения - "средству определения"; модуль 703 уведомления о результатах определения - "средству уведомления о результатах определения"; устройство 8A связи на стороне земли и устройство 8B связи на стороне транспортного средства - "средству определения позиции"; модуль 704 управления зарядом - "средству управления зарядом"; и схема определения температуры, включенная в электрическую схему 2B на стороне транспортного средства, - "средству определения температуры".
[0054] Второй вариант осуществления
Фиг. 9 является блок-схемой, иллюстрирующей бесконтактную зарядную систему согласно другому варианту осуществления изобретения. Второй вариант осуществления отличается от вышеуказанного первого варианта осуществления посредством включения модуля 705 вычисления времени процесса заряда и модуля 706 уведомления о времени. Поскольку оставшаяся конфигурация является идентичной конфигурации вышеуказанного первого варианта осуществления, ее описание содержится надлежащим образом.
[0055] Как проиллюстрировано на фиг. 9, ECU 7 включает в себя модуль 704 управления зарядом, модуль 705 вычисления времени процесса заряда и модуль 706 уведомления о времени. Модуль 705 вычисления времени процесса заряда вычисляет время (T1) процесса заряда для заряда аккумулятора 5 согласно SOC, определенному посредством модуля 601 определения состояния заряда, и позиции катушки для передачи мощности относительно позиции катушки 1B для приема мощности. Как проиллюстрировано на фиг. 4, электрическая мощность, принимаемая посредством катушки 1B для приема мощности, варьируется согласно величине смещения позиции катушки 1B для приема мощности относительно позиции катушки 1A для передачи мощности. Следовательно, электрическая мощность, принимаемая посредством катушки 1B для приема мощности, может наблюдаться посредством определения величины смещения позиции катушки 1B для приема мощности относительно позиции катушки 1A для передачи мощности. Затем, как проиллюстрировано на фиг. 5 и 6, время процесса заряда для аккумулятора 5 может быть вычислено посредством получения электрической мощности, принимаемой посредством катушки 1B для приема мощности, и текущего SOC аккумулятора 5.
[0056] Во втором варианте осуществления сначала, когда транспортное средство паркуется в предварительно определенном месте для парковки, ECU 7 определяет позицию катушки 1A для передачи мощности через устройство 8A связи на стороне земли и устройство 8B связи на стороне транспортного средства. Кроме того, модуль 601 определения состояния заряда определяет SOC аккумулятора 5. Модуль 705 вычисления времени процесса заряда вычисляет величину смещения позиции между катушками из позиции катушки 1A для передачи мощности относительно позиции катушки 1B для приема мощности. Затем модуль 705 вычисления времени процесса заряда вычисляет электрическую мощность, принимаемую посредством катушки 1B для приема мощности, из величины смещения позиции между катушками. В этой связи, что касается электрической мощности, принимаемой посредством катушки 1B для приема мощности, ECU 7 сохраняет карту, к примеру, проиллюстрированную на фиг. 4, и обращается к карте на предмет определенной позиции катушки 1A для передачи мощности, чтобы за счет этого вычислять электрическую мощность, принимаемую посредством катушки 1B для приема мощности.
[0057] Когда выходная мощность из катушки 1A для передачи мощности в катушку 1B для приема мощности задается фиксированной в модуле 100 на стороне земли, модуль 705 вычисления времени процесса заряда может вычислять электрическую мощность, принимаемую посредством катушки 1B для приема мощности, посредством вычисления того, какое процентное отношение от предварительной фиксированным образом заданной выходной мощности может быть принято посредством катушки 1B для приема мощности, согласно величине смещения позиции между катушками. Между тем, когда выходная мощность из катушки 1A для передачи мощности в катушку 1B для приема мощности является переменной в модуле 100 на стороне земли, ECU 7 определяет выходную мощность из катушки 1A для передачи мощности, заданную посредством ECU 3, через устройства 8A, 8B связи. Затем модуль 705 вычисления времени процесса заряда может вычислять электрическую мощность, принимаемую посредством катушки 1B для приема мощности, посредством вычисления того, какое процентное отношение от определенной выходной мощности может быть принято посредством катушки 1B для приема мощности, согласно величине смещения позиции между катушками.
[0058] Затем модуль 704 управления зарядом задает мощность процесса заряда для аккумулятора 5 на основе мощности процесса заряда, запрашиваемой посредством BC 6, и электрической мощности, принимаемой посредством катушки 1B для приема мощности. Модуль 705 вычисления времени процесса заряда вычисляет время (T1) процесса заряда для заряда до полного заряда, начиная с SOC, из мощности процесса заряда, заданной посредством модуля 704 управления зарядом и SOC, на основе режима заряда модуля 704 управления зарядом. В этой связи, например, когда целевое SOC после заряда задается посредством потребности пользователя и т.п., модуль 704 управления зарядом вычисляет время (T1) процесса заряда, занимаемое для увеличения с текущего SOC до целевого SOC.
[0059] В силу этого модуль 705 вычисления времени процесса заряда вычисляет время (T1) процесса заряда из определенной позиции катушки 1A для передачи мощности и определенного SOC. Вычисленное время (T1) процесса заряда больше по мере того, как величина смещения позиции катушки 1A для передачи мощности относительно позиции катушки 1B для приема мощности больше, и время (T1) процесса заряда больше по мере того, как SOC меньше.
[0060] Кроме того, модуль 705 вычисления времени процесса заряда вычисляет время (T2) процесса заряда в случае, если катушка 1B для приема мощности находится в позиции, соответствующей позиции катушки 1A для передачи мощности, из SOC. Позиция катушки 1B для приема мощности, соответствующая позиции катушки 1A для передачи мощности, означает позицию, в которой центр катушки 1A для передачи мощности совпадает с центром катушки 1B для приема мощности в двумерных направлениях катушки 1A для передачи мощности или катушки 1B для приема мощности, и в этой позиции эффективность приема мощности катушки 1A для передачи мощности и катушки 1B для приема мощности является наибольшей, и эта позиция соответствует идеальной припаркованной позиции транспортного средства. Кроме того, идеальная припаркованная позиция транспортного средства является позицией, в которой катушка 1A для передачи мощности и катушка 1B для приема мощности обращены друг к другу под прямым углом, и в этой позиции время процесса заряда является наименьшим. Следовательно, в состоянии, в котором SOC имеет идентичное значение, время (T1) процесса заряда при возникновении смещения позиции между катушками превышает время (T2) процесса заряда.
[0061] Когда катушка 1B для приема мощности находится в позиции, соответствующей позиции катушки 1A для передачи мощности (или в идеальной припаркованной позиции транспортного средства), потери мощности, отвлекаемые на передачу мощности из катушки 1A для передачи мощности в катушку 1B для приема мощности, предварительно определяются. Следовательно, когда выходная мощность из катушки 1A для передачи мощности в катушку 1B для приема мощности задается фиксированной, электрическая мощность, принимаемая посредством катушки 1B для приема мощности, в идеальной припаркованной позиции транспортного средства предварительно определяется, и, таким образом, модуль 705 вычисления времени процесса заряда может вычислять время (T2) процесса заряда посредством использования текущего SOC без использования информации позиции на катушке 1A для передачи мощности.
[0062] Кроме того, когда выходная мощность из катушки 1A для передачи мощности в катушку 1B для приема мощности является переменной в модуле 100 на стороне земли, ECU 7 определяет выходную мощность из катушки 1A для передачи мощности, заданной посредством ECU 3 через устройства 8A, 8B связи. ECU 7 вычисляет электрическую мощность, принимаемую посредством катушки 1B для приема мощности, посредством вычитания потерь мощности, отвлекаемых на передачу мощности в идеальной припаркованной позиции транспортного средства, из выходной мощности. Модуль 704 управления зарядом задает мощность процесса заряда для аккумулятора 5 на основе мощности процесса заряда, запрашиваемой посредством BC 6, и электрической мощности, принимаемой посредством катушки 1B для приема мощности. Затем модуль 705 вычисления времени процесса заряда может вычислять время (T2) процесса заряда посредством использования мощности процесса заряда и текущего SOC.
[0063] Когда время (T1) процесса заряда и время (T2) процесса заряда вычисляются посредством модуля 705 вычисления времени процесса заряда, ECU 7 вычисляет разность (ΔT) времен между временем (T1) процесса заряда и временем (T2) процесса заряда и сравнивает разность (ΔT) времен с предварительно установленной разностью (ΔTc) времен. Разность (ΔTc) времен указывает разность времен из времени процесса заряда, разрешенного для времени (T2) процесса заряда. Другими словами, при возникновении смещения позиций катушек относительно позиций катушек, соответствующих времени (T2) процесса заряда, время (T1) процесса заряда превышает время (T2) процесса заряда, и время (T1) процесса заряда больше по мере того, как величина смещения позиции между катушками больше. Следовательно, разность (ΔTc) времен является эквивалентной разрешенной величине смещения позиции между катушками. В этой связи разность (ΔTc) времен может задаваться так, что она соответствует предварительно допущенному времени процесса заряда, или может задаваться согласно времени процесса заряда, требуемому человеком, находящимся в транспортном средстве, и разность (ΔTc) времен больше по мере того, как время процесса заряда, требуемое человеком, находящимся в транспортном средстве, больше.
[0064] Затем, когда разность (ΔT) времен превышает разность (ΔTc) времен, ECU 7 определяет то, что смещение позиции между катушками возникает до такой степени, что процесс заряда в пределах разрешенного времени процесса заряда является невозможным, и модуль 706 уведомления о времени уведомляет человека, находящегося в транспортном средстве, относительно времени (T1) процесса заряда. Когда человек, находящийся в транспортном средстве, проверяет время (T1) процесса заряда и определяет то, что процесс заряда, который занимает время (T1) процесса заряда, может быть выполнен для заряда аккумулятора 5, человек, находящийся в транспортном средстве, нажимает кнопку начала заряда (не проиллюстрирована) и т.п., чтобы начинать процесс заряда. Между тем, когда человек, находящийся в транспортном средстве, определяет то, что процесс заряда, который занимает время (T1) процесса заряда, не выполняется для заряда аккумулятора 5, водитель паркует транспортное средство снова таким образом, чтобы достигать меньшей величины смещения позиции между катушками.
[0065] Когда разность (ΔT) времен меньше, чем разность (ΔTc) времен, ECU 7 определяет то, что величина смещения позиции между катушками является такой, что процесс заряда в пределах разрешенного времени процесса заряда является возможным, и ECU 7 управляет модулем 704 управления зарядом, чтобы начинать процесс заряда аккумулятора 5.
[0066] В силу этого во втором варианте осуществления время (T1) процесса заряда вычисляется согласно позиции катушки 1A для передачи мощности и SOC, уведомление относительно времени (T1) процесса заряда предоставляется согласно результату сравнения между временем (T1) процесса заряда и временем (T2) процесса заряда, и аккумулятор 5 заряжается.
[0067] Далее описывается управляющая процедура бесконтактной зарядной системы по второму варианту осуществления со ссылкой на фиг. 10. Фиг. 10 является блок-схемой последовательности операций способа, иллюстрирующей управляющую процедуру бесконтактной зарядной системы по второму варианту осуществления. Когда управление посредством бесконтактной зарядной системы по второму варианту осуществления начинается, на этапе S11 модуль 601 определения состояния заряда определяет SOC аккумулятора 5 и передает информацию определенного SOC в ECU 7. На этапе S12 ECU 7 определяет позицию катушки передачи 1A через устройство 8A связи на стороне земли и устройство 8B связи на стороне транспортного средства. На этапе S13 модуль 705 вычисления времени процесса заряда вычисляет время (T1) процесса заряда согласно определенной позиции катушки 1A для передачи мощности и определенного SOC. На этапе S14 модуль 705 вычисления времени процесса заряда вычисляет время (T2) процесса заряда согласно SOC.
[0068] На этапе S15, ECU 7 вычисляет разность (ΔT) времен между временем (T1) процесса заряда и временем (T2) процесса заряда и сравнивает разность (ΔT) времен с предварительно установленной разностью (ΔTc) времен. Когда разность (ΔT) времен равна или меньше разности (ΔTc) времен, ECU 7 определяет то, что процесс заряда в пределах предварительно установленной допустимой продолжительности является возможным, и модуль 704 управления зарядом задает мощность процесса заряда согласно SOC аккумулятора 5 и электрической мощности, принимаемой посредством катушки 1B для приема мощности, и подает мощность процесса заряда в аккумулятор 5, чтобы за счет этого начинать процесс заряда аккумулятора 5 (на этапе S16).
[0069] Между тем, когда разность (ΔT) времен превышает разность (ΔTc) времен, ECU 7 определяет то, что процесс заряда в пределах предварительно установленной допустимой продолжительности является невозможным, и модуль 706 уведомления о времени уведомляет человека, находящегося в транспортном средстве, относительно времени (T1) процесса заряда посредством отображения времени (T1) процесса заряда на дисплее и т.п. навигационной системы (на этапе S151). На этапе S152 человек, находящийся в транспортном средстве, определяет то, следует или нет выполнять процесс заряда, который занимает время (T1) процесса заряда. Когда человек, находящийся в транспортном средстве, определяет то, что процесс заряда аккумулятора 5 может занимать время (T1) процесса заряда, и человек, находящийся в транспортном средстве, нажимает кнопку начала заряда (не проиллюстрирована) и т.п., чтобы начинать процесс заряда, управление переходит к этапу S16. Когда человек, находящийся в транспортном средстве, определяет не выполнять процесс заряда, который занимает время (T1) процесса заряда, водитель паркует транспортное средство снова на этапе S153, и управление возвращается к этапу S11. Например, в случае, если разность (ΔTc) времен задается равной 1 часу, и время (T1) процесса заряда составляет 9 часов, и время (T2) процесса заряда составляет 7 часов, когда человек, находящийся в транспортном средстве, считает, что процесс заряда за 10 часов подходит, необязательно парковать транспортное средство снова в идеальной припаркованной позиции, и, таким образом, во втором варианте осуществления процесс заряда, который занимает время (T1) процесса заряда, начинается. Между тем, когда человек, находящийся в транспортном средстве, хочет заряжаться в пределах 8 часов, процесс заряда не может быть завершен в пределах требуемого времени в относительных позициях катушек, в которых время (T1) процесса заряда занимается, и, следовательно, транспортное средство паркуется снова.
[0070] Затем SOC аккумулятора 5 достигает состояния полного заряда, и управление посредством бесконтактной зарядной системы по второму варианту осуществления завершается.
[0071] Как описано выше, бесконтактное зарядное устройство по второму варианту осуществления включает в себя катушку 1B для приема мощности, электрическую схему 2B на стороне транспортного средства, аккумулятор 5, модуль 601 определения состояния заряда, устройства 8A, 8B связи и модуль 705 вычисления времени процесса заряда, и время (T1) процесса заряда для аккумулятора 5 вычисляется согласно определенной позиции катушки 1A для передачи мощности и SOC. Время (T1) процесса заряда для аккумулятора 5 варьируется согласно смещению позиции между катушкой 1B для приема мощности и катушкой 1A для передачи мощности и SOC. Во втором варианте осуществления время (T1) процесса заряда может быть вычислено согласно позиции катушки 1A для передачи мощности и SOC, и таким образом, например, когда человек, находящийся в транспортном средстве, уведомляется относительно времени (T1) процесса заряда, человек, находящийся в транспортном средстве, может видеть время (T1) процесса заряда согласно смещению позиции между катушками. Кроме того, когда сообщенное время (T1) процесса заряда является большим, человек, находящийся в транспортном средстве, может распознавать, что величина смещения позиции между катушками является большой, и, таким образом, человек, находящийся в транспортном средстве, паркует транспортное средство снова, чтобы уменьшать величину смещения позиции между катушками, и за счет этого может достигаться уменьшение времени процесса заряда. Кроме того, когда человек, находящийся в транспортном средстве, может выделять время для заряда, человек, находящийся в транспортном средстве, может заряжать аккумулятор 5, даже если величина смещения позиции между катушками является большой, и, следовательно, время (T1) процесса заряда является большим, и, таким образом, водитель может сэкономить время и усилия для парковки транспортного средства снова, чтобы регулировать позиции катушек, и, как результат, второй вариант осуществления может повышать удобство пользователя.
[0072] Кроме того, например, когда разрешенное время (Ts) процесса заряда задается, разрешенная величина смещения позиции между катушками может быть определена посредством времени процесса заряда, и, таким образом, сравнение времени (T1) процесса заряда со временем (Ts) процесса заряда обеспечивает наблюдение того, может или нет процесс заряда быть завершен в пределах времени (Ts) процесса заряда в текущей припаркованной позиции транспортного средства. В частности, процесс заряда разрешен, когда время (T1) процесса заряда меньше времени (Ts) процесса заряда, тогда как, с другой стороны, процесс заряда не разрешен, когда время (T1) процесса заряда превышает время (Ts) процесса заряда. Затем водитель может парковать транспортное средство таким образом, чтобы поддерживать относительные позиции катушек, разрешенные согласно SOC, в соответствии с определенными результатами, и, таким образом, второй вариант осуществления может повышать удобство пользователя. Кроме того, когда время (T1) процесса заряда вследствие смещения позиции между катушками выходит за пределы разрешенного времени (Ts) процесса заряда, транспортное средство паркуется снова, чтобы уменьшать величину смещения позиции между катушками, и за счет этого уменьшение полного времени процесса заряда может достигаться. В этой связи разрешенное время (Ts) процесса заряда может быть временем, заданным человеком, находящимся в транспортном средстве.
[0073] Кроме того, во втором варианте осуществления вычисляется время (T2) процесса заряда для аккумулятора 5 в случае, если катушка 1B для приема мощности находится в позиции, соответствующей позиции катушки 1A для передачи мощности. Во втором варианте осуществления вычисляются время (T1) процесса заряда и время (T2) процесса заряда, и за счет этого величина смещения позиции между катушкой 1A для передачи мощности и катушкой 1B для приема мощности относительно их точек центров может быть определена посредством времени процесса заряда.
[0074] Кроме того, во втором варианте осуществления, когда разность (ΔT) времен между временем (T1) процесса заряда и временем (T2) процесса заряда превышает разность (ΔTc) времен, модуль 706 уведомления о времени предоставляет уведомление относительно, по меньшей мере, времени (T1) процесса заряда. В силу этого пользователь может быть уведомлен о том, что процесс заряда не может быть завершен в пределах допустимой продолжительности вследствие большой величины смещения позиции между катушками. Кроме того, когда пользователь может выделять время, пользователь может выполнять процесс заряда, который занимает время (T1) процесса заряда, тогда как, с другой стороны, когда пользователь не может выделять время, пользователь может выполнять процесс заряда за меньшее время, чем время (T1) процесса заряда, например, посредством парковки транспортного средства снова или выполнения аналогичной операции, чтобы изменять позиции катушек. Как результат, второй вариант осуществления предоставляет достижение уменьшения полного времени процесса заряда, а также повышения удобства пользователя.
[0075] В этой связи на этапе S151, когда разность (ΔT) времен превышает разность (ΔTc) времен, модуль 706 уведомления о времени предоставляет уведомление относительно времени (T1) процесса заряда; тем не менее, модуль 706 уведомления о времени может предоставлять уведомление относительно времени (T1) процесса заряда в сочетании со временем (T2) процесса заряда при условии только того, что модуль 706 уведомления о времени предоставляет уведомление относительно, по меньшей мере, времени (T1) процесса заряда. Модуль 706 уведомления о времени предоставляет уведомление относительно времени (T1) процесса заряда и времени (T2) процесса заряда, и за счет этого человек, находящийся в транспортном средстве, может видеть время (T1) процесса заряда в текущей припаркованной позиции транспортного средства и время (T2) процесса заряда в идеальной припаркованной позиции транспортного средства, и, таким образом, человек, находящийся в транспортном средстве, может выбирать начало процесса заряда в текущей припаркованной позиции транспортного средства или повторную парковку транспортного средства при необходимости, и, следовательно, второй вариант осуществления может повышать удобство пользователя.
[0076] Модуль 705 вычисления времени процесса заряда соответствует "средству вычисления времени процесса заряда", а модуль 706 уведомления о времени соответствует "средству уведомления о времени процесса заряда".
[0077] Третий вариант осуществления
Фиг. 11 является блок-схемой, показывающей бесконтактную зарядную систему согласно еще одному другому варианту осуществления настоящего изобретения. Третий вариант осуществления отличается от вышеуказанного второго варианта осуществления посредством включения модуля 707 вычисления потребления. Поскольку оставшаяся конфигурация является идентичной конфигурации вышеуказанного второго варианта осуществления, ее описание содержится надлежащим образом.
[0078] Как проиллюстрировано на фиг. 11, ECU 7 включает в себя модуль 704 управления зарядом, модуль 705 вычисления времени процесса заряда, модуль 706 уведомления о времени и модуль 707 вычисления потребления. Модуль 707 вычисления потребления вычисляет величину мощности аккумулятора 5, потребляемую посредством движения транспортного средства, содержащего модуль 200 на стороне транспортного средства.
[0079] В бесконтактной зарядной системе согласно второму варианту осуществления, на этапе S153 по фиг. 10 водитель паркует транспортное средство снова, чтобы регулировать позиции катушки 1A для передачи мощности и катушки 1B для приема мощности. Парковка транспортного средства снова потребляет электрическую мощность, заряженную в аккумуляторе 5. Следовательно, когда транспортное средство паркуется снова, и аккумулятор 5 заряжается в идеальной припаркованной позиции транспортного средства, время процесса заряда получается посредством суммирования времени процесса заряда для заряда емкости аккумулятора, соответствующего величине мощности аккумулятора, потребляемой посредством парковки транспортного средства снова, со временем (T2) процесса заряда.
[0080] В третьем варианте осуществления модуль 707 вычисления потребления вычисляет величину мощности аккумулятора 5, потребляемую посредством парковки транспортного средства снова, чтобы перемещать катушку 1B для приема мощности в позицию, соответствующую позиции катушки 1A для передачи мощности. Другими словами, модуль 707 вычисления потребления вычисляет то, до какой степени аккумулятор 5 потребляет электрическую мощность, посредством перемещения транспортного средства из текущей припаркованной позиции, чтобы парковать транспортное средство в идеальной припаркованной позиции. Затем модуль 705 вычисления времени процесса заряда вычисляет время (T3) процесса заряда для заряда потребленной величины мощности аккумулятора. Другими словами, модуль 705 вычисления времени процесса заряда преобразует потребляемую величину мощности аккумулятора 5 во время процесса заряда. Когда транспортное средство паркуется, и смещение позиции между катушками возникает, время процесса заряда для полного заряда аккумулятора 5 является временем (T1) процесса заряда, вычисленным посредством модуля 705 вычисления времени процесса заряда. Кроме того, когда транспортное средство паркуется снова в идеальной припаркованной позиции посредством перемещения из припаркованной позиции, в которой возникает смещение позиции между катушками, время (T4) процесса заряда для полного заряда аккумулятора 5 вычисляется посредством суммирования посредством модуля 705 вычисления времени процесса заряда времени (T3) процесса заряда со временем (T2) процесса заряда.
[0081] До того как транспортное средство паркуется снова, модуль 705 вычисления времени процесса заряда вычисляет время (T4) процесса заряда. В частности, проезжаемый путь, по которому транспортное средство паркуется снова в идеальной припаркованной позиции посредством перемещения из припаркованной позиции, в которой возникает смещение позиции между катушками, вычисляется посредством использования системы вычисления оптимального маршрута и т.п., используемой в навигационной системе, управления для обхода препятствий и т.п., и, таким образом, до того, как транспортное средство паркуется снова, модуль 707 вычисления потребления может получать текущее SOC, определенное посредством модуля 601 определения состояния заряда, и вычислять потребляемую величину мощности аккумулятора 5 из SOC и проезжаемого пути.
[0082] Затем ECU 7 сравнивает время (T1) процесса заряда со временем (T4) процесса заряда. Когда время (T1) процесса заряда превышает время (T4) процесса заряда, меньшее время процесса заряда может достигаться посредством парковки транспортного средства водителя снова в идеальной припаркованной позиции. Следовательно, когда время (T1) процесса заряда превышает время (T4) процесса заряда, ECU 7 осуществляет управление таким образом, что модуль 706 уведомления о времени предоставляет уведомление относительно времени (T1) процесса заряда и времени (T4) процесса заряда для человека, находящегося в транспортном средстве, чтобы определять то, следует начинать процесс заряда или парковать транспортное средство снова. Между тем, когда время (T1) процесса заряда меньше времени (T4) процесса заряда, время процесса заряда становится больше, если водитель паркует транспортное средство снова, и таким образом, меньшее время процесса заряда может достигаться посредством выполнения заряда в текущей припаркованной позиции транспортного средства. Следовательно, когда время (T1) процесса заряда меньше времени (T4) процесса заряда, ECU 7 инструктирует модулю 704 управления зарядом начинать процесс заряда аккумулятора 5.
[0083] В силу этого в третьем варианте осуществления вычисляются время (T1) процесса заряда в текущей припаркованной позиции транспортного средства и время (T4) процесса заряда в идеальной позиции с учетом величины мощности аккумулятора 5, потребляемой посредством парковки транспортного средства снова, и аккумулятор 5 заряжается согласно результату сравнения между временем (T1) процесса заряда и временем (T4) процесса заряда.
[0084] Далее описывается управляющая процедура бесконтактной зарядной системы по третьему варианту осуществления со ссылкой на фиг. 12. Фиг. 12 является блок-схемой последовательности операций способа, иллюстрирующей управляющую процедуру бесконтактной зарядной системы по третьему варианту осуществления. Когда управление посредством бесконтактной зарядной системы по третьему варианту осуществления начинается, выполняются операции управления этапов S21-S24. Поскольку операции управления этапов S21-S24 являются идентичными операциям управления этапов S11-S14 согласно второму варианту осуществления, описание операций управления опускается. После этапа S24 модуль 707 вычисления потребления вычисляет величину мощности аккумулятора 5, потребляемую посредством парковки транспортного средства снова, чтобы перемещать катушку 1B для приема мощности в позицию, соответствующую катушке 1A для передачи мощности. Затем модуль 705 вычисления времени процесса заряда вычисляет время (T3) процесса заряда для заряда емкости аккумулятора, соответствующей потребленной величине мощности аккумулятора (на этапе S25). На этапе S26 ECU 7 инструктирует модулю 705 вычисления времени процесса заряда вычислять время (T4) процесса заряда посредством суммирования времени (T3) процесса заряда со временем (T2) процесса заряда и сравнивает время (T1) процесса заряда со временем (T4) процесса заряда.
[0085] Когда время (T1) процесса заряда равно или меньше времени (T4) процесса заряда, меньшее время процесса заряда может достигаться посредством выполнения заряда в текущей припаркованной позиции транспортного средства, а не посредством парковки транспортного средства снова, и таким образом, под управлением ECU 7 модуль 704 управления зарядом задает мощность процесса заряда согласно SOC аккумулятора 5 и электрической мощности, принимаемой посредством катушки 1B для приема мощности, и подает мощность процесса заряда в аккумулятор 5, чтобы за счет этого начинать процесс заряда аккумулятора 5 (на этапе S27).
[0086] Между тем, когда время (T1) процесса заряда превышает время (T4) процесса заряда, меньшее время процесса заряда может достигаться посредством парковки транспортного средства снова в идеальной припаркованной позиции, и таким образом на этапе S261 модуль 706 уведомления о времени уведомляет человека, находящегося в транспортном средстве, относительно времени (T1) процесса заряда и времени (T4) процесса заряда посредством отображения времени (T1) процесса заряда и времени (T4) процесса заряда на дисплее и т.п. навигационной системы. На этапе S262 человек, находящийся в транспортном средстве, определяет то, следует или нет выполнять процесс заряда, который занимает время (T1) процесса заряда. Когда человек, находящийся в транспортном средстве, определяет то, что процесс заряда аккумулятора 5 может занимать время (T1) процесса заряда, и человек, находящийся в транспортном средстве, нажимает кнопку начала заряда (не проиллюстрирована) и т.п., чтобы начинать процесс заряда, управление переходит к этапу S27. Когда человек, находящийся в транспортном средстве, хочет и определяет выполнять процесс заряда, который занимает время (T4) процесса заряда меньше времени (T1) процесса заряда, водитель паркует транспортное средство снова на этапе S263, и управление возвращается к этапу S21.
[0087] Затем SOC аккумулятора 5 достигает состояния полного заряда, и управление посредством бесконтактной зарядной системы по третьему варианту осуществления завершается.
[0088] Как описано выше, в бесконтактном зарядном устройстве третьего варианта осуществления модуль 707 вычисления потребления вычисляет величину мощности аккумулятора 5, потребляемую посредством парковки транспортного средства, имеющего модуль 200 на стороне транспортного средства, снова, чтобы перемещать катушку 1B для приема мощности в позицию, соответствующую катушке 1A для передачи мощности, и время (T3) процесса заряда для заряда емкости аккумулятора, соответствующей потребленной величине мощности аккумулятора, вычисляется. Это обеспечивает вычисление времени процесса заряда в случае повторной парковки транспортного средства с учетом величины мощности аккумулятора 5, потребляемой посредством парковки транспортного средства снова в идеальной припаркованной позиции. Кроме того, в третьем варианте осуществления сравнение времени (T1) процесса заряда со временем (T4) процесса заряда обеспечивает наблюдение того, должно или нет транспортное средство парковаться снова, чтобы достигать меньшего времени процесса заряда, в силу этого достигая уменьшения полного времени процесса заряда.
[0089] Кроме того, в этом варианте осуществления модуль 705 вычисления времени процесса заряда вычисляет время (T4) процесса заряда посредством суммирования времени (T3) процесса заряда со временем (T2) процесса заряда, и если время (T4) процесса заряда меньше времени (T1) процесса заряда, модуль 706 уведомления о времени выдает уведомление относительно времени (T1) процесса заряда и времени (T4) процесса заряда. В силу этого в третьем варианте осуществления пользователь может распознавать, что меньшее время процесса заряда может достигаться посредством парковки транспортного средства снова, а также пользователь может определять то, следует или нет парковать транспортное средство снова, согласно требуемому времени процесса заряда пользователя. Как результат, третий вариант осуществления может повышать удобство пользователя.
[0090] Кроме того, в третьем варианте осуществления, когда время (T4) процесса заряда превышает время (T1) процесса заряда, процесс заряда начинается в позиции катушки 1A для передачи мощности относительно позиции катушки 1B для приема мощности, в которой возникает смещение позиции между катушками. В силу этого, когда меньшее время процесса заряда может достигаться посредством выполнения заряда в текущей припаркованной позиции транспортного средства, а не посредством парковки транспортного средства снова, процесс заряда может быть начат без парковки транспортного средства снова, и таким образом, может быть повышено удобство пользователя.
[0091] В этой связи в третьем варианте осуществления, когда транспортное средство паркуется снова, выходная мощность приводного электромотора (не проиллюстрирован) из транспортного средства может быть ограничена, чтобы минимизировать расход питания аккумулятора посредством повторной парковки транспортного средства. Это упрощает оценку времени потребления аккумулятора. Дополнительно более простая оценка достигается посредством автоматизации повторной парковки транспортного средства.
[0092] Модуль 707 вычисления потребления соответствует "средству вычисления потребления" настоящего изобретения.
[0093] Четвертый вариант осуществления
Фиг. 13 является блок-схемой, показывающей бесконтактную зарядную систему согласно дополнительному варианту осуществления настоящего изобретения. Четвертый вариант осуществления отличается от вышеуказанного второго варианта осуществления посредством включения модуля 707 вычисления потребления, модуля 708 вычисления времени парковки и модуля 709 уведомления относительно повторной парковки. Оставшаяся конфигурация является идентичной конфигурации вышеуказанного второго варианта осуществления, и описание второго и третьего вариантов осуществления содержится надлежащим образом.
[0094] Как проиллюстрировано на фиг. 13, ECU 7 включает в себя модуль 704 управления зарядом, модуль 705 вычисления времени процесса заряда, модуль 706 уведомления о времени, модуль 707 вычисления потребления, модуль 708 вычисления времени парковки и модуль 709 уведомления относительно повторной парковки. Модуль 708 вычисления времени парковки вычисляет время (Tp) парковки для перемещения транспортного средства, имеющего модуль 200 на стороне транспортного средства, из текущей припаркованной позиции, чтобы парковать транспортное средство в идеальной припаркованной позиции. В предварительно определенном состоянии модуль 709 уведомления относительно повторной парковки предоставляет уведомление человеку, находящемуся в транспортном средстве, чтобы заставлять его парковать транспортное средство снова. Уведомление предоставляется, например, посредством отображения уведомления на модуле отображения и т.п. навигационной системы. Когда водитель паркует транспортное средство снова, чтобы регулировать позиции катушки 1A для передачи мощности и катушки 1B для приема мощности, время (Tp) парковки для перемещения транспортного средства требуется. Затем время процесса заряда для процесса заряда до полного заряда посредством парковки транспортного средства снова в идеальной позиции относительно позиции, в которой возникает смещение позиции между катушками, может задаваться также с учетом времени (Tp) парковки.
[0095] В четвертом варианте осуществления, следовательно, модуль 708 вычисления времени парковки вычисляет время (Tp) парковки, и модуль 705 вычисления времени процесса заряда вычисляет время (T5) процесса заряда посредством суммирования времени (T3) процесса заряда и времени (Tp) парковки со временем (T2) процесса заряда. Когда транспортное средство паркуется, и смещение позиции между катушками возникает, время процесса заряда для полного заряда аккумулятора 5 является временем (T1) процесса заряда, вычисленным посредством модуля 705 вычисления времени процесса заряда. Кроме того, когда транспортное средство паркуется снова в идеальной припаркованной позиции посредством перемещения из припаркованной позиции, в которой возникает смещение позиции между катушками, время (T5) процесса заряда для полного заряда аккумулятора 5 вычисляется посредством суммирования посредством модуля 705 вычисления времени процесса заряда времени (T3) процесса заряда и времени (Tp) парковки со временем (T2) процесса заряда.
[0096] В этой связи до того, как транспортное средство паркуется снова, модуль 708 вычисления времени парковки вычисляет время (Tp) парковки. В частности, проезжаемый путь, по которому транспортное средство паркуется снова в идеальной припаркованной позиции посредством перемещения из припаркованной позиции, в которой возникает смещение позиции между катушками, вычисляется посредством использования системы вычисления оптимального маршрута и т.п., используемой в навигационной системе, управления для обхода препятствий и т.п., и, таким образом, до того, как транспортное средство паркуется снова, модуль 708 вычисления времени парковки может вычислять время (Tp) парковки из проезжаемого пути и предварительно установленной средней скорости для парковки.
[0097] Затем ECU 7 сравнивает время (T1) процесса заряда со временем (T5) процесса заряда. Когда время (T1) процесса заряда превышает время (T5) процесса заряда, меньшее время процесса заряда может достигаться посредством парковки транспортного средства водителя снова в идеальной припаркованной позиции. Следовательно, когда время (T1) процесса заряда превышает время (T5) процесса заряда, под управлением ECU 7, в то время как модуль 706 уведомления о времени предоставляет уведомление относительно времени (T1) процесса заряда и времени (T5) процесса заряда, модуль 709 уведомления относительно повторной парковки предоставляет уведомление, чтобы парковать транспортное средство снова.
[0098] В силу этого в четвертом варианте осуществления вычисляются время (T1) процесса заряда в текущей припаркованной позиции транспортного средства и время (T5) процесса заряда в идеальной позиции с учетом величины мощности аккумулятора 5, потребляемой посредством парковки транспортного средства снова, и времени (Tp) парковки, и аккумулятор 5 заряжается согласно результату сравнения между временем (T1) процесса заряда и временем (T5) процесса заряда.
[0099] Далее описывается управляющая процедура бесконтактной зарядной системы по четвертому варианту осуществления со ссылкой на фиг. 14. Фиг. 14 является блок-схемой последовательности операций способа, иллюстрирующей управляющую процедуру бесконтактной зарядной системы по четвертому варианту осуществления. Когда управление посредством бесконтактной зарядной системы по четвертому варианту осуществления начинается, выполняются операции управления этапов S31-S35. Поскольку операции управления этапов S31-S35 являются идентичными операциям управления этапов S21-S25 согласно третьему варианту осуществления, описание операций управления опускается. После этапа S35 модуль 708 вычисления времени парковки вычисляет время (Tp) парковки для повторной парковки транспортного средства, чтобы перемещать катушку 1B для приема мощности в позицию, соответствующую катушке 1A для передачи мощности (этап S36). На этапе S37 ECU 7 инструктирует модулю 705 вычисления времени процесса заряда вычислять время (T5) процесса заряда посредством суммирования времени (T3) процесса заряда и времени (Tp) парковки со временем (T2) процесса заряда и сравнивает время (T1) процесса заряда со временем (T5) процесса заряда.
[0100] Когда время (T1) процесса заряда равно или меньше времени (T5) процесса заряда, меньшее время процесса заряда может достигаться посредством выполнения заряда в текущей припаркованной позиции транспортного средства, а не посредством парковки транспортного средства снова, и, таким образом, под управлением ECU 7 модуль 704 управления зарядом задает мощность процесса заряда согласно SOC аккумулятора 5 и электрической мощности, принимаемой посредством катушки 1B для приема мощности, и подает мощность процесса заряда в аккумулятор 5, чтобы за счет этого начинать процесс заряда аккумулятора 5 (на этапе S38).
[0101] Между тем, когда время (T1) процесса заряда превышает время (T5) процесса заряда, меньшее время процесса заряда может достигаться посредством парковки транспортного средства снова в идеальной припаркованной позиции, и, таким образом, на этапе S371 модуль 706 уведомления о времени уведомляет человека, находящегося в транспортном средстве, относительно времени (T1) процесса заряда и времени (T5) процесса заряда посредством отображения времени (T1) процесса заряда и времени (T5) процесса заряда на дисплее и т.п. навигационной системы. Кроме того, на этапе S372 модуль 709 уведомления относительно повторной парковки уведомляет человека, находящегося в транспортном средстве, чтобы парковать транспортное средство снова.
[0102] На этапе S152 человек, находящийся в транспортном средстве, определяет то, следует или нет выполнять процесс заряда, который занимает время (T1) процесса заряда. Когда человек, находящийся в транспортном средстве, определяет то, что процесс заряда аккумулятора 5 может занимать время (T1) процесса заряда, и человек, находящийся в транспортном средстве, нажимает кнопку начала заряда (не проиллюстрирована) и т.п., чтобы начинать процесс заряда, управление переходит к этапу S38. Когда человек, находящийся в транспортном средстве, хочет и определяет выполнять процесс заряда, который занимает время (T5) процесса заряда меньше времени (T1) процесса заряда, водитель паркует транспортное средство снова на этапе S374, и управление возвращается к этапу S31.
[0103] Затем SOC аккумулятора 5 достигает состояния полного заряда, и управление посредством бесконтактной зарядной системы по четвертому варианту осуществления завершается.
[0104] Как описано выше, в бесконтактном зарядном устройстве по четвертому варианту осуществления модуль 708 вычисления времени парковки вычисляет время (Tp) парковки для парковки транспортного средства, имеющего модуль 200 на стороне транспортного средства, снова, чтобы перемещать катушку 1B для приема мощности в позицию, соответствующую катушке 1A для передачи мощности. Это обеспечивает вычисление времени процесса заряда в случае повторной парковки транспортного средства с учетом времени парковки для парковки транспортного средства снова в идеальной припаркованной позиции. Кроме того, в четвертом варианте осуществления сравнение времени (T1) процесса заряда со временем (T5) процесса заряда обеспечивает наблюдение того, должно или нет транспортное средство парковаться снова, чтобы достигать меньшего времени процесса заряда, в силу этого достигая уменьшения полного времени процесса заряда.
[0105] Кроме того, в четвертом варианте осуществления модуль 705 вычисления времени процесса заряда вычисляет время (T5) процесса заряда посредством суммирования времени (T3) процесса заряда и времени (Tp) парковки со временем (T2) процесса заряда, и если время (T5) процесса заряда меньше времени (T1) процесса заряда, модуль 706 уведомления о времени выдает уведомление относительно времени (T1) процесса заряда и времени (T5) процесса заряда. В силу этого в четвертом варианте осуществления пользователь может распознавать, что меньшее время процесса заряда может достигаться посредством парковки транспортного средства снова, а также пользователь может определять то, следует или нет парковать транспортное средство снова, согласно требуемому времени процесса заряда пользователя. Как результат, четвертый вариант осуществления может повышать удобство пользователя.
[0106] Кроме того, в четвертом варианте осуществления, когда время (T5) процесса заряда меньше времени (T1) процесса заряда, модуль 709 уведомления относительно повторной парковки уведомляет пользователя, чтобы парковать транспортное средство снова. В силу этого в четвертом варианте осуществления пользователь может распознавать, что меньшее время процесса заряда может достигаться посредством парковки транспортного средства снова, а также пользователь может определять то, следует или нет парковать транспортное средство снова, согласно требуемому времени процесса заряда пользователя. Как результат, четвертый вариант осуществления может повышать удобство пользователя.
[0107] Кроме того, в четвертом варианте осуществления, когда время (T5) процесса заряда превышает время (T1) процесса заряда, процесс заряда начинается в позиции катушки 1A для передачи мощности относительно позиции катушки 1B для приема мощности, в которой возникает смещение позиции между катушками. В силу этого, когда меньшее время процесса заряда может достигаться посредством выполнения заряда в текущей припаркованной позиции транспортного средства, а не посредством парковки транспортного средства снова, процесс заряда может быть начат без парковки транспортного средства снова, и, таким образом, может быть повышено удобство пользователя.
[0108] Модуль 708 вычисления времени парковки соответствует "средству вычисления времени парковки" настоящего изобретения, а модуль 709 уведомления относительно повторной парковки соответствует "средству уведомления относительно повторной парковки".
[0109] Пятый вариант осуществления
Фиг. 15 является блок-схемой, показывающей бесконтактную зарядную систему согласно еще одному дополнительному варианту осуществления настоящего изобретения. Пятый вариант осуществления отличается от вышеуказанного первого варианта осуществления посредством включения модуля 705 вычисления времени процесса заряда и модуля 706 уведомления о времени. Поскольку оставшаяся конфигурация является идентичной конфигурации вышеуказанного первого варианта осуществления, ее описание уже включено.
[0110] Как проиллюстрировано на фиг. 15, ECU 7 включает в себя модуль 701 задания допустимого диапазона для процесса заряда, модуль 702 определения, модуль 703 уведомления о результатах определения, модуль 704 управления зарядом, модуль 705 вычисления времени процесса заряда и модуль 706 уведомления о времени. Модуль 701 задания допустимого диапазона для процесса заряда задает допустимый диапазон для процесса заряда согласно SOC. Модуль 705 вычисления времени процесса заряда вычисляет время (T1) процесса заряда для заряда до полного заряда из позиции катушки 1A для передачи мощности относительно позиции катушки 1B для приема мощности и SOC. Кроме того, модуль 705 вычисления времени процесса заряда вычисляет время (T2) процесса заряда в случае, если катушка 1B для приема мощности находится в позиции, соответствующей позиции катушки 1A для передачи мощности, из SOC. Время (T1) процесса заряда указывает время процесса заряда в позициях катушек в текущей припаркованной позиции транспортного средства, и время (T2) процесса заряда указывает время процесса заряда в позициях катушек в идеальной припаркованной позиции транспортного средства. В ECU 7 разность (ΔTc) времен предварительно устанавливается для сравнения с разностью (ΔT) времен между временем (T1) процесса заряда и временем (T2) процесса заряда. Разность (ΔTc) времен указывает разность времен из времени процесса заряда, разрешенного для времени (T2) процесса заряда.
[0111] Здесь допустимый диапазон для процесса заряда и разность (ΔTc) времен указывают разрешенную величину смещения позиции между катушками относительно идеальной позиции транспортного средства с точки зрения пространственного диапазона и время, соответственно, и разность (ΔTc) времен задается таким образом, что разрешенная величина смещения позиции между катушками больше по сравнению с допустимым диапазоном для процесса заряда. Например, предполагается, что, когда SOC имеет определенное значение, позиция катушки 1A для передачи мощности определяется как выходящая за пределы допустимого диапазона для процесса заряда; даже в этом случае, когда разность (ΔT) времен между временем (T1) процесса заряда и временем (T2) процесса заряда меньше разности (ΔTc) времен, выполняется определение в отношении того, что величина смещения позиции между катушками меньше разрешенной величины, и процесс заряда разрешен.
[0112] Далее описывается управляющая процедура бесконтактной зарядной системы по пятому варианту осуществления со ссылкой на фиг. 16. Фиг. 16 является блок-схемой последовательности операций способа, иллюстрирующей управляющую процедуру бесконтактной зарядной системы по пятому варианту осуществления. Когда управление посредством бесконтактной зарядной системы по пятому варианту осуществления начинается, на этапе S41 модуль 601 определения состояния заряда определяет SOC аккумулятора 5 и передает информацию относительно определенного SOC в ECU 7. На этапе S42 модуль 701 задания допустимого диапазона для процесса заряда задает допустимый диапазон для процесса заряда согласно определенному SOC. На этапе S43 ECU 7 определяет позицию катушки 1A для передачи мощности через устройство 8A связи на стороне земли и устройство 8B связи на стороне транспортного средства. На этапе S44 модуль 702 определения определяет то, находится или нет позиция катушки 1A для передачи мощности в допустимом диапазоне для процесса заряда.
[0113] Когда позиция катушки 1A для передачи мощности находится в допустимом диапазоне для процесса заряда, на этапе S45 модуль 704 управления зарядом задает мощность процесса заряда согласно SOC аккумулятора 5 и электрической мощности, принимаемой посредством катушки 1B для приема мощности, и подает мощность процесса заряда в аккумулятор 5, чтобы за счет этого начинать процесс заряда аккумулятора 5.
[0114] Между тем, когда позиция катушки 1A для передачи мощности не находится в допустимом диапазоне для процесса заряда, на этапе S441 модуль 705 вычисления времени процесса заряда вычисляет время (T1) процесса заряда согласно определенной позиции катушки 1A для передачи мощности и определенного SOC. На этапе S442 модуль 705 вычисления времени процесса заряда вычисляет время (T2) процесса заряда согласно SOC. На этапе S443 ECU 7 вычисляет разность (ΔT) времен между временем (T1) процесса заряда и временем (T2) процесса заряда и сравнивает разность (ΔT) времен с предварительно установленной разностью (ΔTc) времен. Когда разность (ΔT) времен равна или меньше разности (ΔTc) времен, ECU 7 определяет то, что процесс заряда в пределах предварительно установленной допустимой продолжительности является возможным, и модуль 704 управления зарядом задает мощность процесса заряда согласно SOC аккумулятора 5 и электрической мощности, принимаемой посредством катушки 1B для приема мощности, и подает мощность процесса заряда в аккумулятор 5, чтобы за счет этого начинать процесс заряда аккумулятора 5 (на этапе S16).
[0115] Между тем, когда разность (ΔT) времен превышает разность (ΔTc) времен, ECU 7 определяет то, что процесс заряда в пределах предварительно установленной допустимой продолжительности является невозможным, и модуль 706 уведомления о времени уведомляет человека, находящегося в транспортном средстве, относительно времени (T1) процесса заряда посредством отображения времени (T1) процесса заряда на дисплее и т.п. навигационной системы (на этапе S444). На этапе S445 человек, находящийся в транспортном средстве, определяет то, следует или нет выполнять процесс заряда, который занимает время (T1) процесса заряда. Когда человек, находящийся в транспортном средстве, определяет то, что процесс заряда аккумулятора 5 может занимать время (T1) процесса заряда, и человек, находящийся в транспортном средстве, нажимает кнопку начала заряда (не проиллюстрирована) и т.п., чтобы начинать процесс заряда, управление переходит к этапу S45. Когда человек, находящийся в транспортном средстве, определяет не выполнять процесс заряда, который занимает время (T1) процесса заряда, водитель паркует транспортное средство снова на этапе S446, и управление возвращается к этапу S41.
[0116] Затем SOC аккумулятора 5 достигает состояния полного заряда, и управление посредством бесконтактной зарядной системы по пятому варианту осуществления завершается.
[0117] Как описано выше, бесконтактное зарядное устройство по пятому варианту осуществления включает в себя катушку 1B для приема мощности, электрическую схему 2B на стороне транспортного средства, аккумулятор 5, модуль 601 определения состояния заряда, устройства 8A, 8B связи, модуль 701 задания допустимого диапазона для процесса заряда и модуль 705 вычисления времени процесса заряда, и допустимый диапазон для процесса заряда, указывающий диапазон позиций катушки 1A для передачи мощности относительно позиции катушки 1B для приема мощности, в которой разрешен процесс заряда аккумулятора, задается согласно SOC, и также время (T1) процесса заряда для аккумулятора 5 вычисляется согласно определенной позиции катушки 1A для передачи мощности и SOC. В пятом варианте осуществления вычисляются допустимый диапазон для процесса заряда и время процесса заряда, и то, разрешен или нет заряд, определяется на основе как допустимого диапазона для процесса заряда, так и времени процесса заряда, и в силу этого может быть повышена точность определения, так что может быть повышено удобство пользователя.
[0118] В этой связи бесконтактная зарядная система по пятому варианту осуществления может быть сконфигурирована как система, в которой вычисляются время (T3) процесса заряда и время (T4) процесса заряда и добавляются операции управления этапа S26, этапа S27 и этапов S261-S263, как и в случае с бесконтактной зарядной системой согласно третьему варианту осуществления, либо может быть сконфигурирована как система, в которой вычисляются время (T5) процесса заряда и время (Tp) парковки и добавляются операции управления этапа S37, этапа S38 и этапов S371-S373.
Список ссылочных позиций
[0119] 100 - модуль на стороне земли
1A - катушка для передачи мощности
2A - электрическая схема на стороне земли
3 - ECU
4 - коммерческий внешний источник питания
8A - устройство связи на стороне земли
200 - модуль на стороне транспортного средства
1B - катушка для приема мощности
2B - электрическая схема на стороне транспортного средства
5 - аккумулятор
6 - контроллер аккумулятора
7 - ECU
8B - устройство связи на стороне транспортного средства
601 - модуль определения состояния заряда
701 - модуль задания допустимого диапазона для процесса заряда
702 - модуль определения
703 - модуль уведомления о результатах определения
704 - модуль управления зарядом
705 - модуль вычисления времени процесса заряда
706 - модуль уведомления о времени
707 - модуль вычисления потребления
708 - модуль вычисления времени парковки
709 - модуль уведомления относительно повторной парковки.
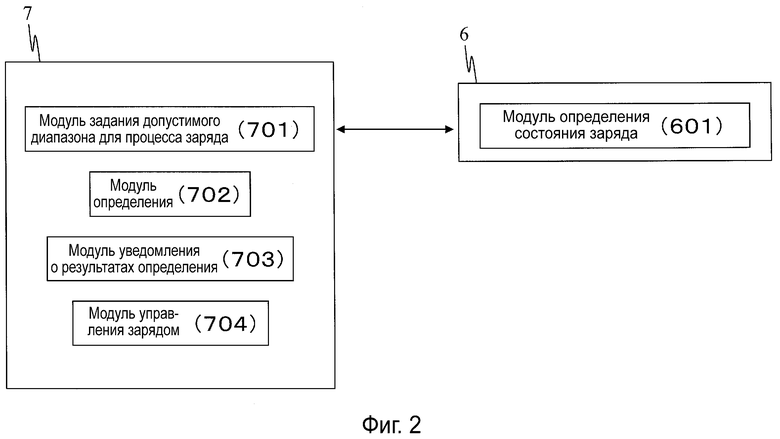
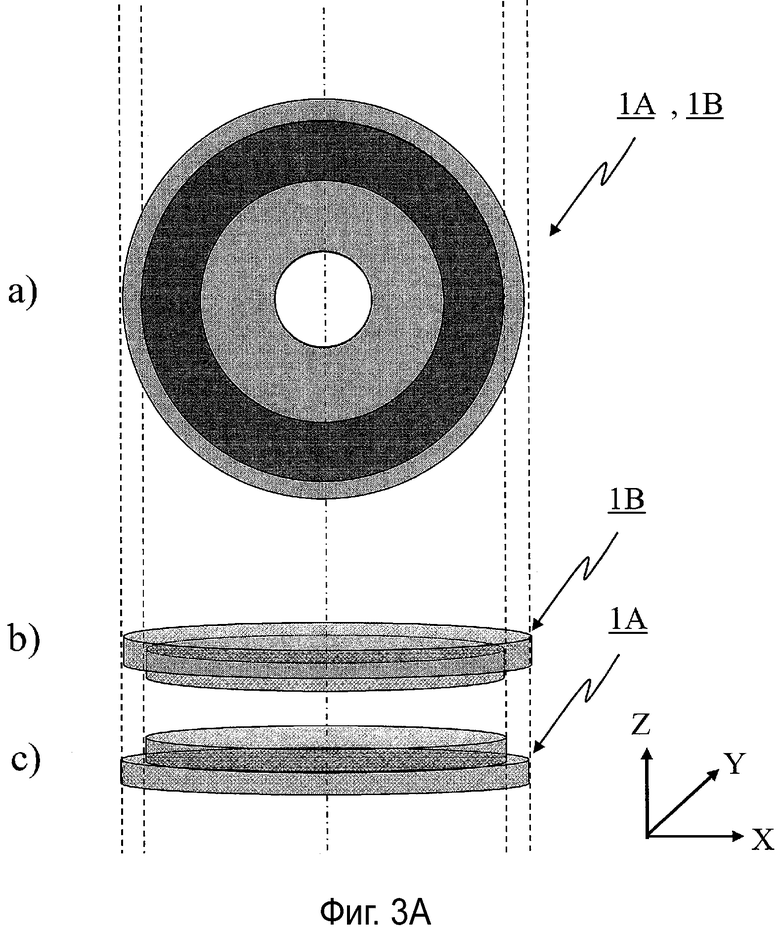
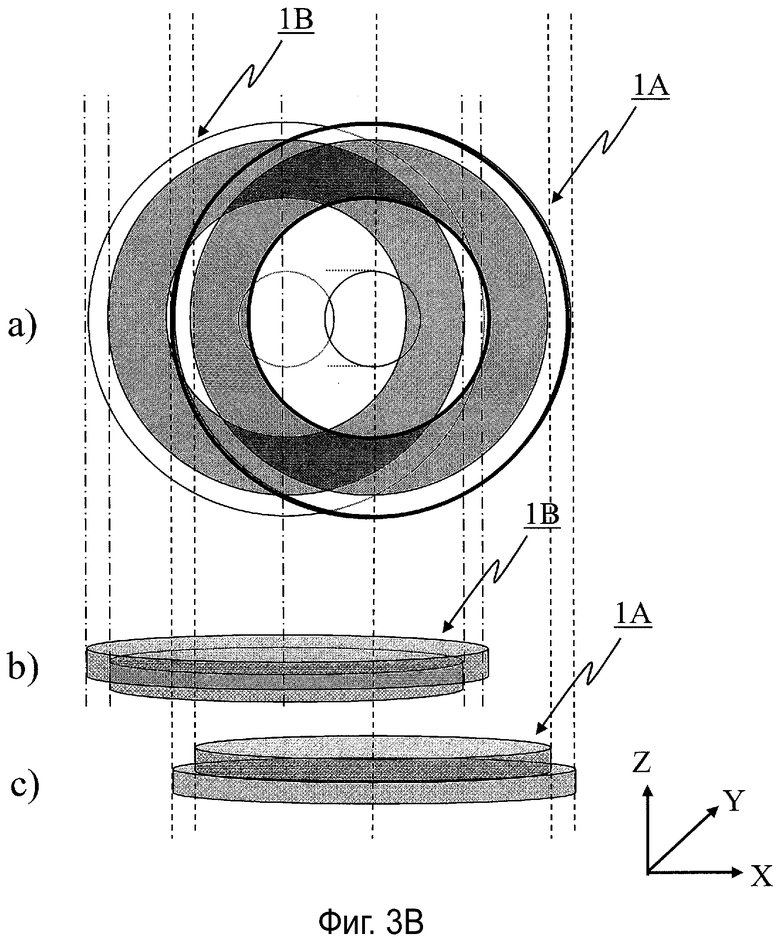
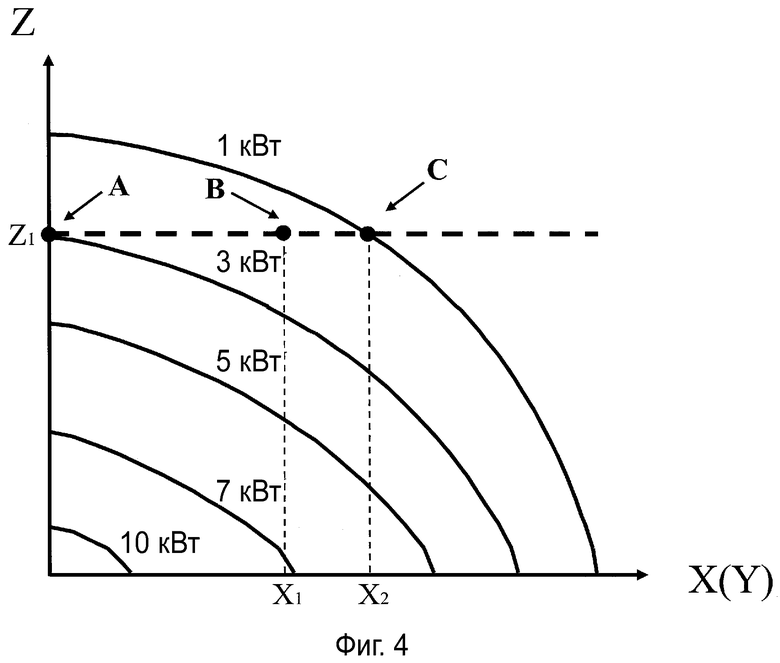
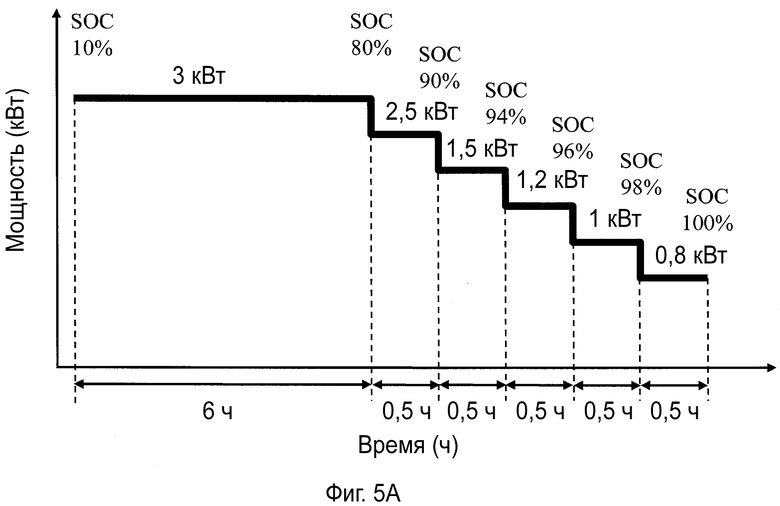
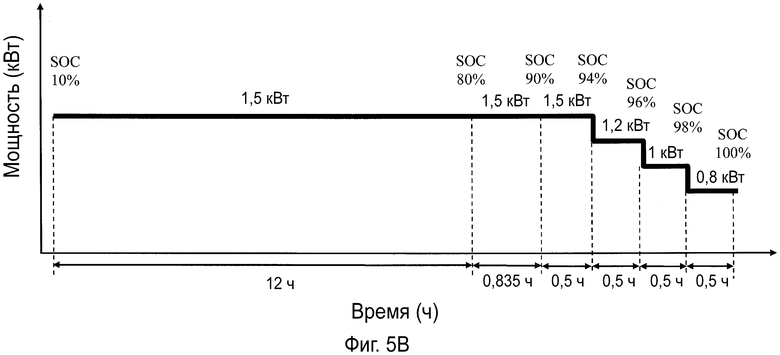
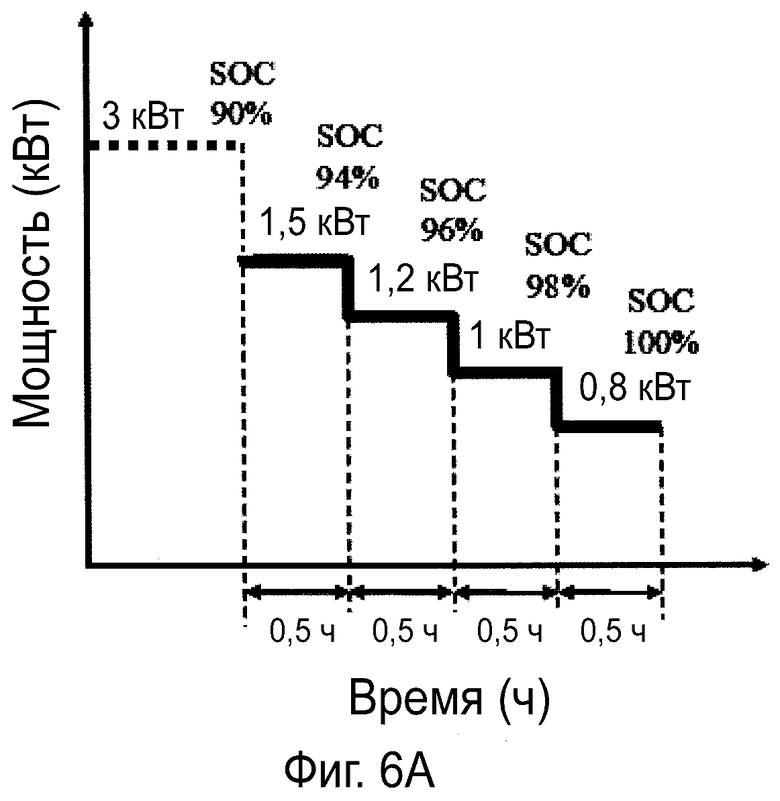
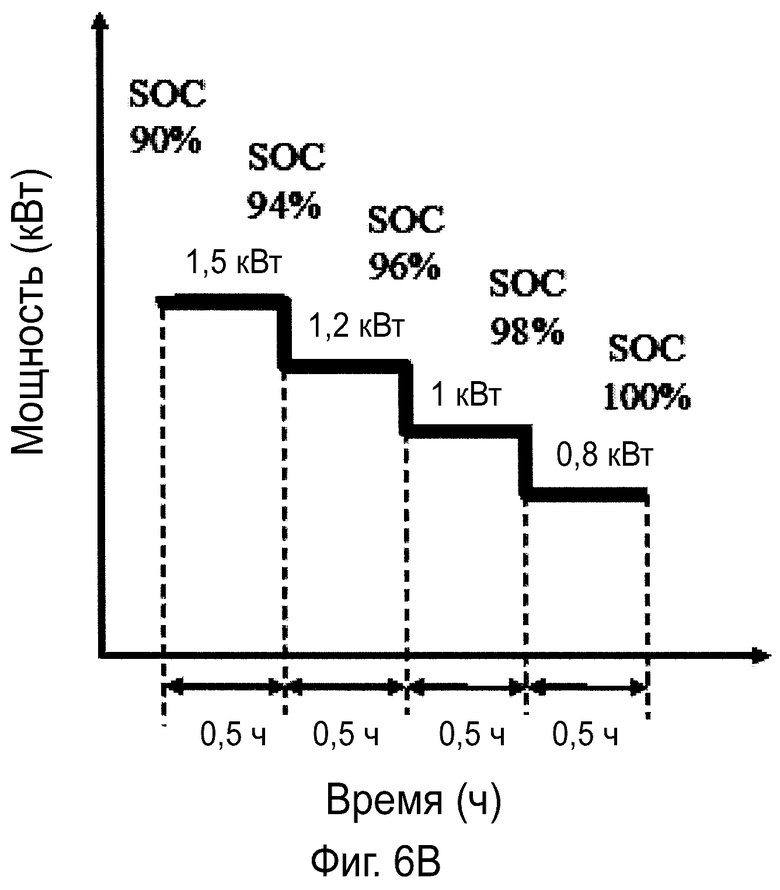
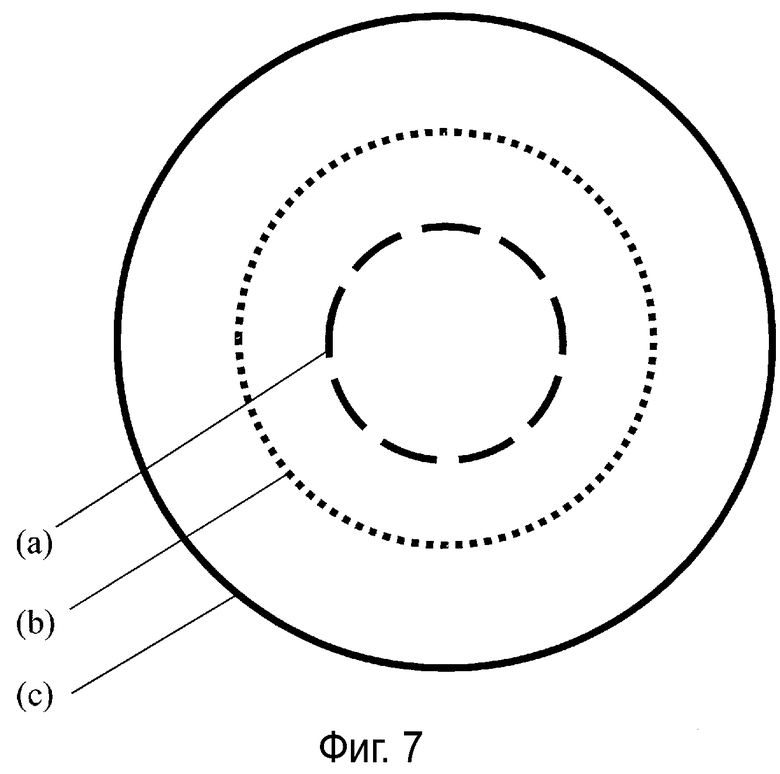
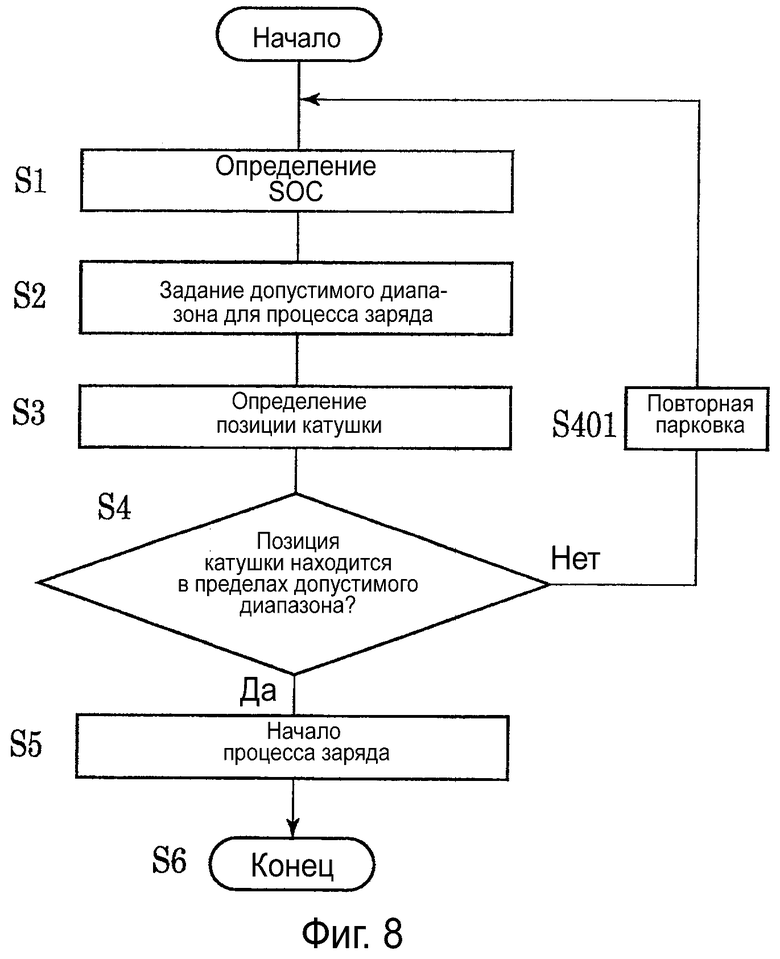
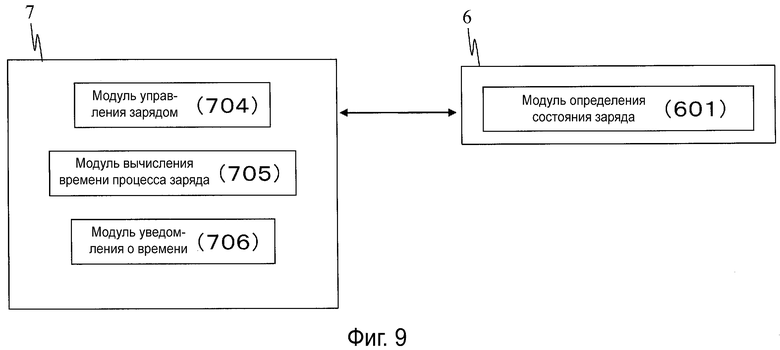
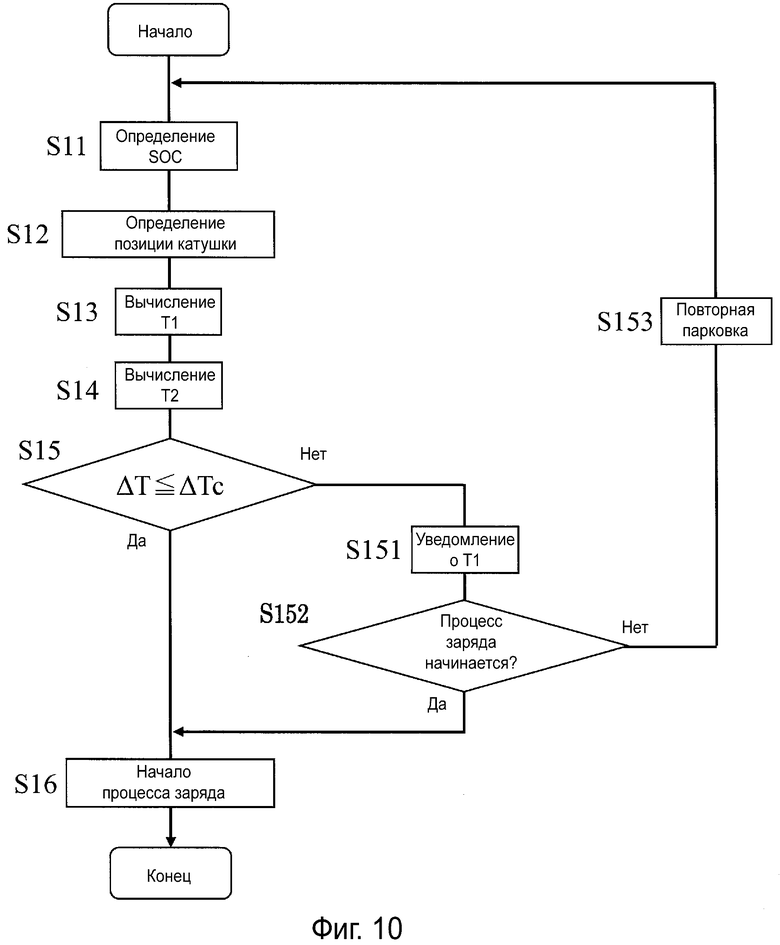
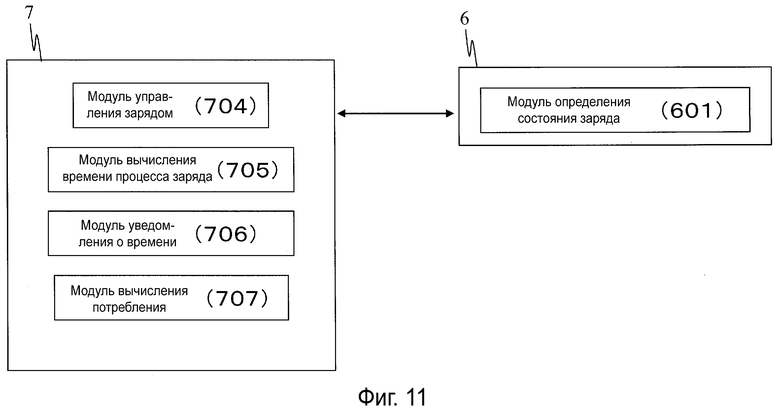
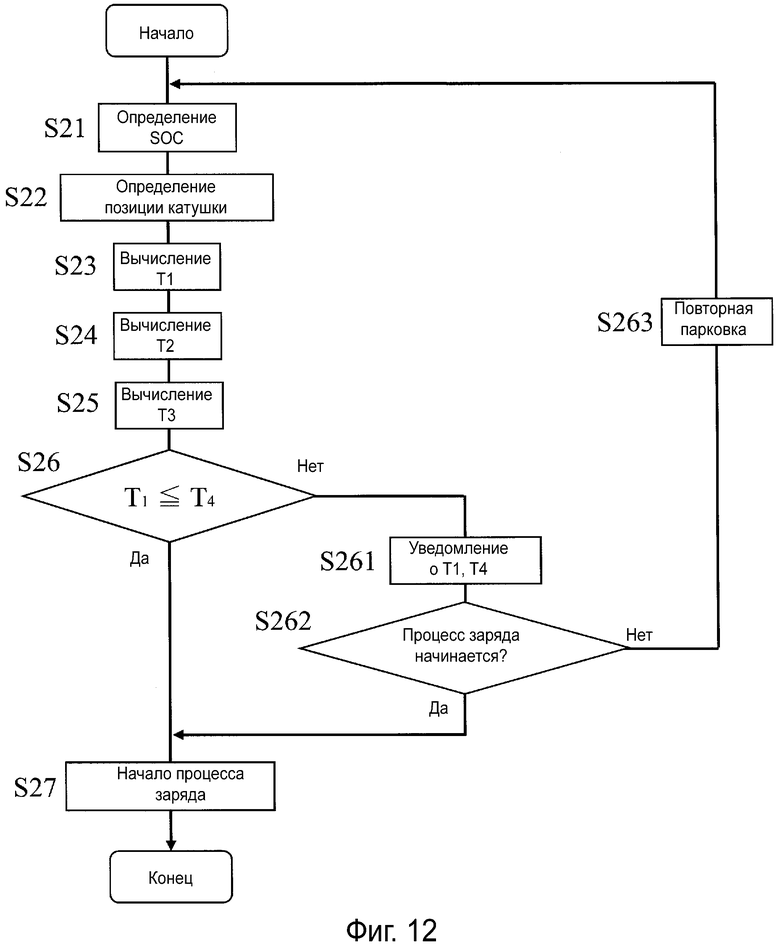
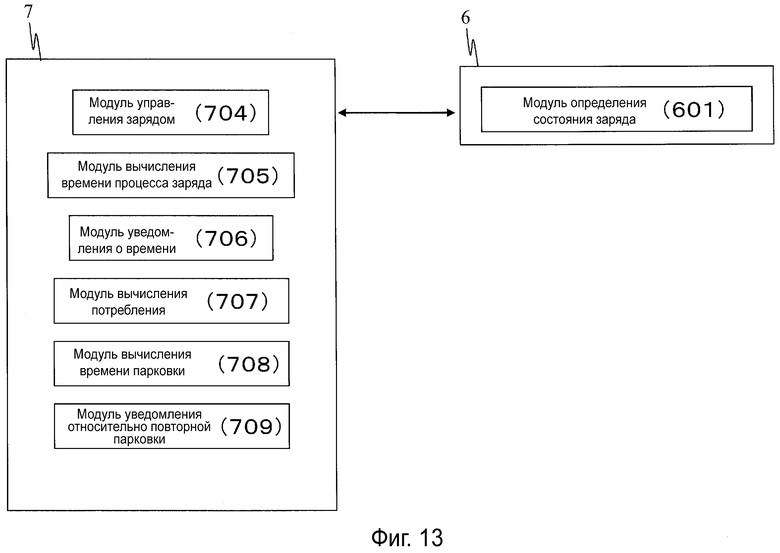
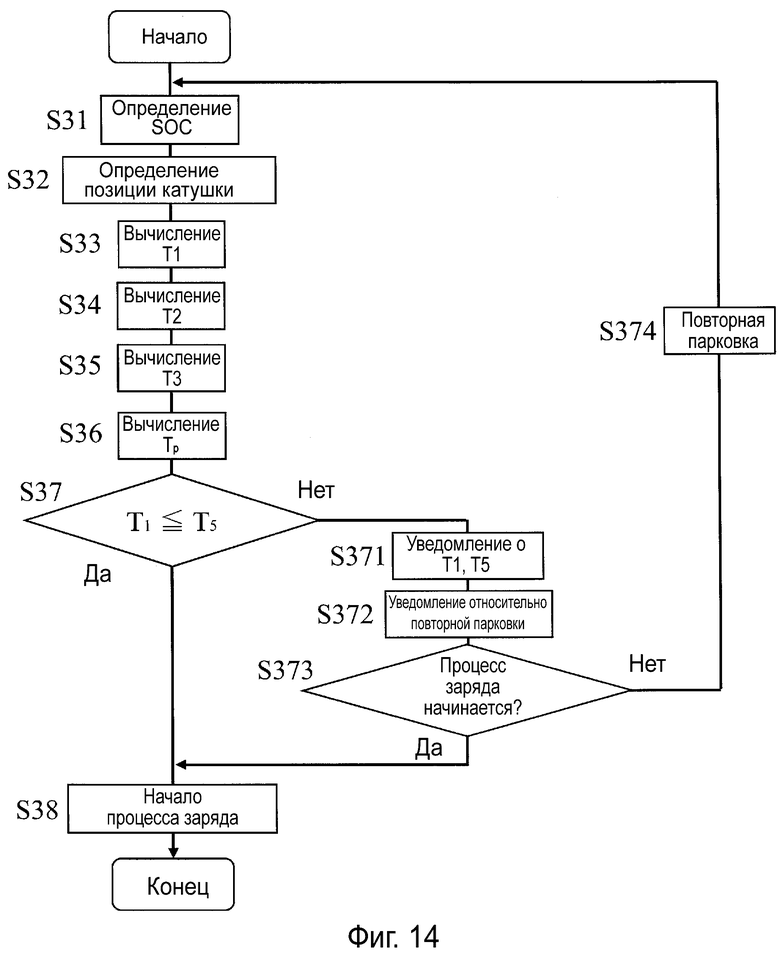
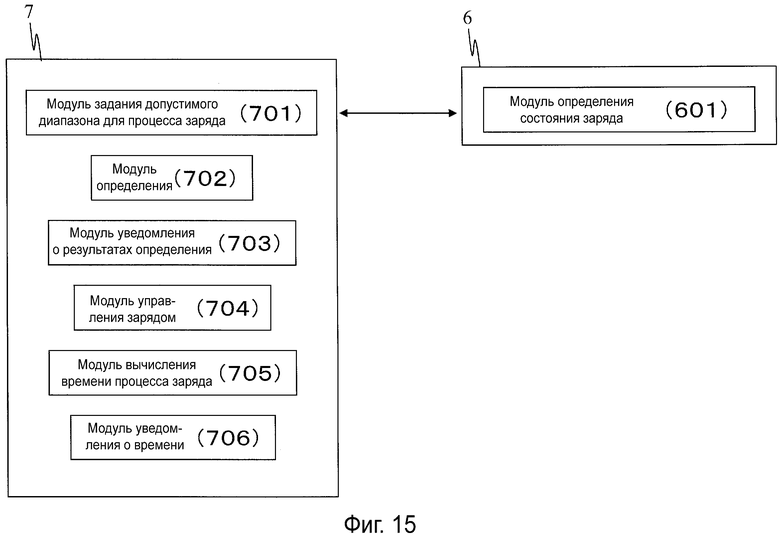
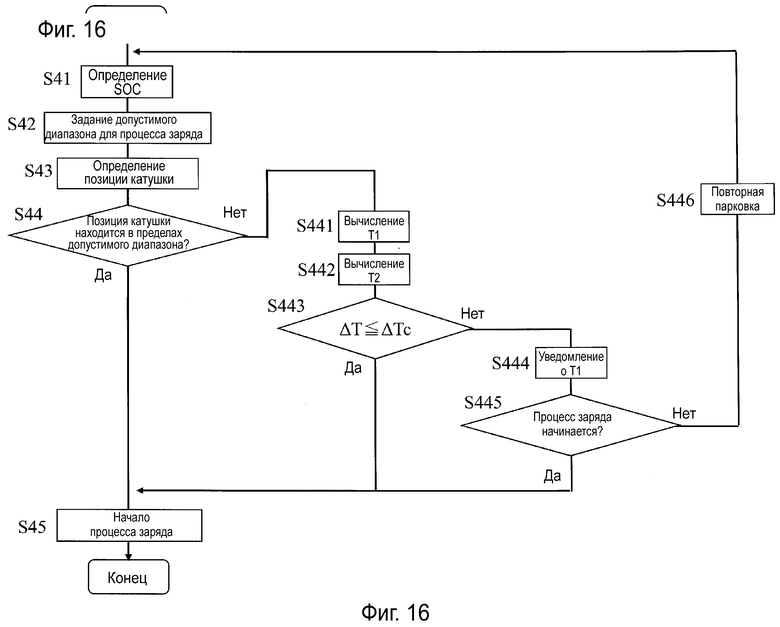
Изобретение относится к бесконтактному зарядному устройству. Бесконтактное зарядное устройство содержит устройство приема мощности, содержащее катушку; аккумулятор; модуль определения состояния заряда аккумулятора; модуль задания допустимого диапазона для процесса заряда; модуль управления зарядом для управления мощностью процесса заряда для аккумулятора и дисплей для отображения допустимого диапазона для процесса заряда. Модуль задания допустимого диапазона для процесса заряда задает допустимый диапазон для процесса заряда шире по мере того, как состояние заряда выше. Повышается удобство пользования. 5 з.п. ф-лы, 19 ил.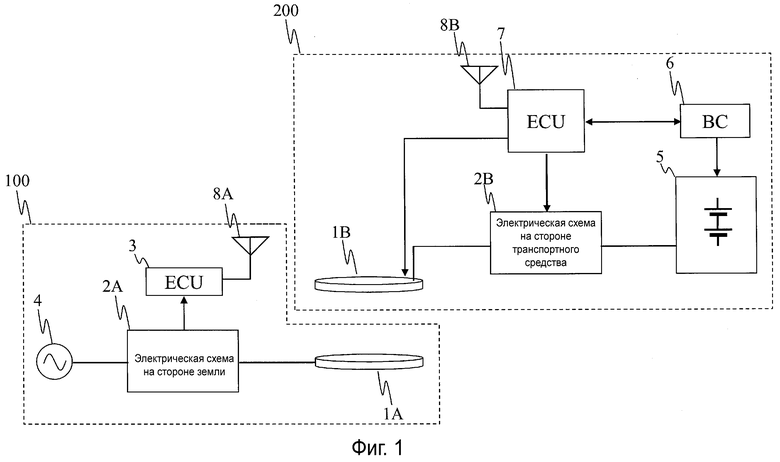
1. Бесконтактное зарядное устройство, содержащее: устройство приема мощности, имеющее, по меньшей мере, катушку для приема мощности, которая принимает электрическую мощность от катушки для передачи мощности бесконтактным способом посредством магнитной связи;
- аккумулятор, который заряжается посредством электрической мощности; модуль определения состояния заряда для определения состояния заряда аккумулятора;
- модуль задания допустимого диапазона для процесса заряда для задания допустимого диапазона для процесса заряда, указывающего диапазон позиций катушки для передачи мощности относительно позиции катушки для приема мощности, в которой процесс заряда аккумулятора разрешен, согласно состоянию заряда, определенному посредством модуля определения состояния заряда;
- модуль управления зарядом для управления мощностью процесса заряда для аккумулятора согласно состоянию заряда, определенному посредством модуля определения состояния заряда; и
дисплей для отображения допустимого диапазона для процесса заряда,
при этом модуль задания допустимого диапазона для процесса заряда задает допустимый диапазон для процесса заряда шире по мере того, как состояние заряда выше.
2. Бесконтактное зарядное устройство по п. 1, в котором модуль управления зарядом заряжает аккумулятор посредством электрической мощности, принимаемой посредством катушки для приема мощности, которая определяется посредством смещения позиции катушки для приема мощности относительно позиции катушки для передачи мощности, и ограничивает мощность процесса заряда посредством уменьшения мощности процесса заряда по мере того, как состояние заряда становится более высоким.
3. Бесконтактное зарядное устройство по любому из пп. 1 и 2, содержащее:
- модуль определения температуры для определения температуры аккумулятора или температуры в транспортном средстве, имеющем устройство приема мощности,
при этом модуль задания допустимого диапазона для процесса заряда задает допустимый диапазон для процесса заряда согласно температуре, определенной посредством модуля определения температуры.
4. Бесконтактное зарядное устройство по любому из пп. 1 и 2, дополнительно содержащее:
- модуль определения позиции для определения позиции катушки для передачи мощности;
- модуль определения для определения того, разрешен ли или нет процесс заряда аккумулятора; и
- модуль уведомления о результатах определения для предоставления уведомления относительно результатов, определенных посредством модуля определения,
при этом модуль определения определяет то, что процесс заряда аккумулятора разрешен, когда позиция катушки для передачи мощности, определенная посредством модуля определения позиции, находится в допустимом диапазоне для процесса заряда.
5. Бесконтактное зарядное устройство по любому из пп. 1 и 2, дополнительно содержащее:
- средство определения позиции для определения позиции катушки для передачи мощности; и
- модуль вычисления времени процесса заряда для вычисления первого времени процесса заряда для аккумулятора согласно состоянию заряда, определенному посредством модуля определения состояния заряда, и первой позиции катушки для передачи мощности, определенной посредством модуля определения позиции.
6. Бесконтактное зарядное устройство по любому из пп. 1 и 2, в котором модуль управления зарядом уменьшает мощность процесса заряда пошаговым образом по мере того, как состояние заряда становится более высоким.
| JP 2010172185 A, 05.08.2010 | |||
| JPH 11341694 A, 10.12.1999 | |||
| JP 2010268665 A, 25.11.2010 | |||
| ТРАНСПОРТНОЕ СРЕДСТВО И ЭЛЕКТРИЧЕСКОЕ УСТРОЙСТВО | 2007 |
|
RU2385809C1 |

