Изобретения относятся к области приборостроения, являются средствами навигации, у которых система ориентации интегрирована с гидростатическим блоком наклона (ГБН) и трехосевым компасом, и могут быть использованы для морских объектов.
Использование малогабаритных бесплатформенных инерциальных систем ориентации (ИСО) с "грубыми" чувствительными элементами (ЧЭ) типа MËMS (Microelectromechanical System - микроэлектронных механических систем) описано в целом ряде патентов США корпорации American GNC, например, в ряде патентов о микро (малогабаритных) инерциальных измерительных устройствах (ИИУ) (патенты US №№: 6 671 648; 6 522 922; 6 516 283) и о способах обработки измерений параметров движения с их применением (патенты US №№: 6 697 758; 6 651 027; 6 494 093; 6 473 713; 6 427 131). Известны также навигационные системы, описанные в патентах Российской Федерации (патенты RU №№: 2345326; 2348903).
Основное внимание в этих патентах уделено представлению преимуществ πα сравнению с "обычными" традиционными ИИУ дешевого микроблока ИИУ на "грубых" ЧЭ в бесплатформенной инерциальной навигационной системы (БИНС) с вычислительной навигационной платформой с применением в ней контуров демпфирования и других внешних корректирующих средств.
Способ определения навигационных параметров с помощью БИНС по патенту RU № 2348903 основан на использовании сигналов блока акселерометров и гироскопических датчиков угловых скоростей и заключается в следующем. Производят расчет матрицы направляющих косинусов между связанной и навигационной системами координат, компенсируют погрешности акселерометров за счет учета вращения связанной системы, осуществляют пересчет показаний акселерометров из связанной в навигационную систему координат и их интегрирование для расчета текущих скоростей и приращений координат. При этом осуществляют разные режимы движения носителя, на котором установлена БИНС. Этими режимами являются сильный маневр, слабое маневрирование и крейсерское движение без маневрирования. При этом измеряют параметры движения носителя. Этими параметрами являются крен, производная курса и' ускорение носителя в плоскости горизонта. Далее эти параметры используют для вычисления коэффициентов усиления систем, реализующих индивидуальные законы управления параллельно вычисляемых матриц направляющих косинусов между связанной и навигационной системами координат по одним и тем же показаниям акселерометров и датчиков угловых скоростей. Для каждой вычислительной матрицы направляющих косинусов определяют собственные навигационные параметры, имеющие различный частотный характер ошибок. И ошибки вычисления каждой из матриц также имеют различный частотный спектр в зависимости от режимов движения носителя. Навигационные параметры для каждой вычислительной матрицы направляющих косинусов подают на входы мастер-фильтра, формирующего оптимальную комбинацию навигационных решений в зависимости от частотного диапазона их ошибок, а также от параметров движения носителя.
Недостатком этого аналога является необходимость учитывать разные режимы движения носителя, на котором установлена БИНС, что для морских объектов в большинстве случаев неприемлемо.
Наиболее близким по совокупности признаков аналогом заявленных технических решений может считаться способ определения навигационных параметров по патенту США № 5 422 817, поэтому он выбран в качестве прототипа для каждого из изобретений, входящих в заявленную группу.
Сходными с признаками прототипа являются следующие признаки заявленного бесплатформенного навигационного комплекса: инерциальная система ориентации (ИСО) на "грубых" чувствительных элементах, которая подключена к вычислительной платформе и включает расположенные по трем ортогональным осям ИСО три акселерометра и три датчика угловых скоростей.
Сходными с признаками прототипа являются такие признаки заявленного способа коррекции инерциальных датчиков бесплатформенного навигационного комплекса с ИСО на "грубых" ЧЭ: по сигналам трех акселерометров и трех датчиков угловых скоростей, расположенных по трем ортогональным осям ИСО, вычисляют углы ориентации путем расчета матрицы направляющих косинусов между связанной и навигационной системами координат, производят компенсацию погрешностей сигналов ускорений акселерометров, производят пересчет ускорений из связанной системы координат в навигационную систему и определяют текущие скорости и приращения координат.
У прототипа имеется традиционный- недостаток любых инерциальных. систем навигации, заключающийся в том, что ошибки в определении ориентации однозначно определяются точностью датчиков угловых скоростей (ДУС) и акселерометров, тогда как ошибки в определении координат растут с течением времени пропорционально скорости дрейфа ДУС. Этот недостаток, особенно для относительно "грубых" чувствительных элементов (ДУС и акселерометров соответственно на уровне 0,1 град/с и 10-3g), приводит к тому, что через некоторое время автономной работы (это зависит от точности чувствительных элементов) вычисленная на борту носителя навигационная система будет отличаться от истинной навигационной системы на большие углы, что фактически ведет к неработоспособности способа навигации. Ограниченность этого традиционного метода заключается в том, что ошибки инерциальной системы неотделимы от полезного сигнала (то есть истинных навигационных параметров). Этот вывод. основан на том факте, что ошибки инерциальной системы имеют низкочастотный характер, так называемые шулеровские колебания, которые неотделимы от реальных движений носителя, на котором установлена система.
Надо заметить, что традиционный метод счисления навигационных параметров не зависит от параметров движения объекта, то есть точность системы (в первом приближении) не зависит от того, с какими парамеграми двигается носитель, то есть, совершает ли маневр или двигается с постоянной скоростью (крейсерский режим). Ошибки традиционного метода зависят исключительно от точности чувствительных элементов и никаким образом не корректируются внутренними связями.
В основу изобретения поставлена задача создания двух связанных единым изобретательским замыслом технических решений, а именно бесплатформенного навигационного комплекса с инерциальной системой ориентации на "грубых" чувствительных элементах и способа коррекции инерциальных датчиков этого навигационного комплекса, совокупностью существенных признаков каждого их которых обеспечивается достижение единого нового технического свойства -устранение погрешностей определения параметров инерционной системы навигации за счет возможности определения углов наклона между связанной и навигационной системами координат и определения угла азимута.
Указанное новое свойство обеспечивает достижение единого технического результата заявленной группы изобретений - повышение точности определения выходных навигационных параметров бесплатформенной инерциальной системы ориентации - углов ориентации, линейных скоростей и координат ' местоположения.
Задача изобретения решается тем, что в бесплатформенном навигационном комплексе, содержащем инерциальную систему ориентации (ИСО) на "грубых" чувствительных элементах, которая подключена к вычислительной платформе и включает расположенные по трем ортогональным осям ИСО три акселерометра и три датчика угловых скоростей, новым является то, что комплекс дополнительно содержит подключенные к вычислительной платформе трехосевой магнитный компас и гидростатический блок наклона (ГБН), содержащий три дифференциальных датчика гидростатического давления, расположенных по трем ортогональным осям ГБН на концах равных по длине баз.
Задача изобретения решается также тем, что в способе коррекции инерциальных датчиков бесплатформенного навигационного комплекса с ИСО на "грубых" чувствительных элементах, заключающемся в том, что по сигналам трех акселерометров и трех датчиков угловых скоростей, расположенных по трем ортогональным осям ИСО, вычисляют углы ориентации путем расчета матрицы направляющих косинусов между связанной и навигационной системами координат, производят компенсацию погрешностей сигналов ускорений акселерометров, производят пересчет ускорений из связанной системы координат в навигационную систему и определяют текущие скорости и приращения координат.
новым является то, что, что дополнительно производят измерения трехосевым магнитным компасом и тремя дифференциальными датчиками давления, расположенными по трем ортогональным осям на концах равных по длине баз, по показаниям компаса и датчиков давления вычисляют углы наклона между связанной и навигационной системами координат, по показаниям компаса вычисляют угол азимута, и с учетом полученных значений углов наклона и азимута корректируют показания акселерометров и датчиков угловых скоростей.
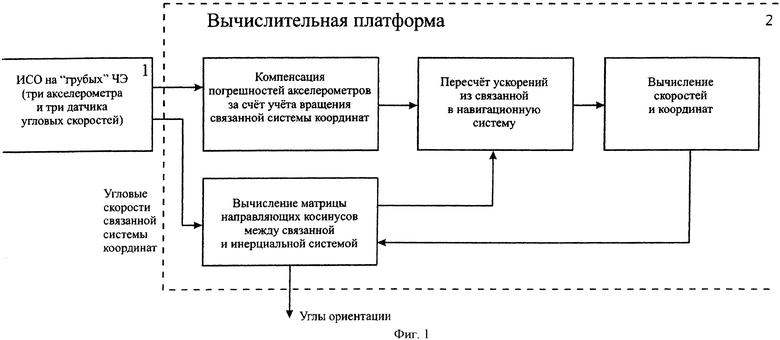
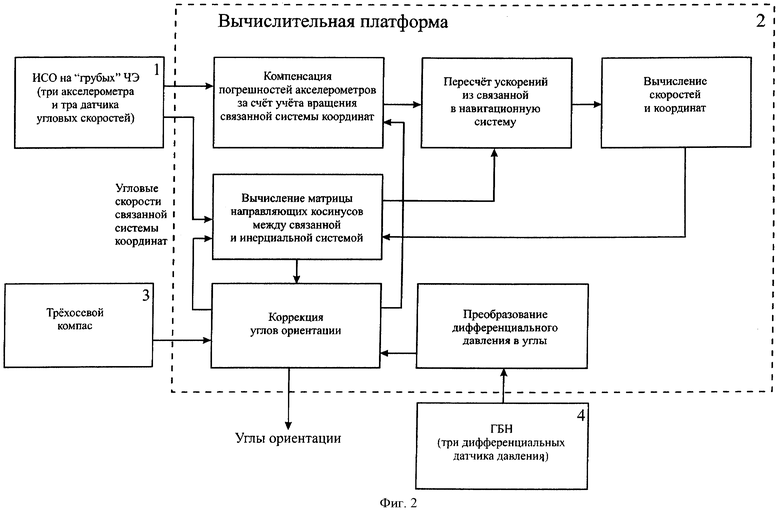
Сущность изобретения поясняется с помощью иллюстраций, на которых в обобщенном виде изображено: фиг. 1 - блок-схема традиционного алгоритма вычисления параметров бесплатформенного навигационного комплекса с ИСО на "грубых" чувствительных элементах; фиг. 2 - блок-схема алгоритма вычисления. навигационных параметров согласно заявленному изобретению.
Традиционно построенный навигационный комплекс (фиг. 1) содержит инерциальную систему ориентации ИСО 1 на "грубых" чувствительных элементах, подключенную к вычислительной платформе 2. ИСО 1 содержит расположенные по трем ее ортогональным осям три акселерометра и три датчика угловьгх скоростей. Выходом этого навигационного комплекса, т.е. выходом вычислительной платформы 2, являются углы ориентации.
Вычислительная платформа 2 в процессе определения скорректированных навигационных параметров осуществляет следующие функции:
- компенсация погрешностей акселерометров за счет учета вращения связанной системы координат;
- вычисление матрицы направляющих косинусов между связанной и инерциальной системой;
- перерасчет ускорений из связанной в навигационную систему;
- вычисление скоростей и координат.
Заявленный бесплатформенный навигационный комплекс (фиг. 2), так же, как и прототип, содержит инерциальную систему ориентации ИСО 1 на "грубых" чувствительных элементах, которая подключена к вычислительной платформе 2 и содержит расположенные по трем ортогональным осям ИСО три акселерометра и три датчика угловых скоростей. При этом выходом комплекса, как и в прототипе, являются углы ориентации.
В алгоритме работы вычислительной платформы 2 также имеются функции, присущие работе вычислительной платформы в прототипе: компенсация погрешностей акселерометров за счет учета вращения связанной системы координат; вычисление матрицы направляющих косинусов между связанной и инерциальной системой; перерасчет ускорений из связанной в навигационную систему; вычисление скоростей и координат.
Согласно изобретению, для компенсациии погрешностей измерений (коррекции инерционных датчиков), навигационный комплекс дополнительно содержит трехосевой магнитный компас 3, подключенный к вычислительной платформе 2, и гидростатический блок наклона ГБН 4, который также подключен к вычислительной платформе 2 и содержит чувствительные элементы - три дифференциальных датчика гидростатического давления, расположенных по. трем ортогональным осям ГБН на концах равных по длине баз.
При этом вычислительная платформа 2 осуществляет дополнительные, по сравнению с прототипом, функции:
- коррекция углов ориентации;
- преобразование дифференциального давления в углы.
Работа заявленного устройства и его преимущества поясняются путем сопоставления с работой прототипа.
В прототипе после получения вычислительной платформой 2 сигналов от акселерометров системы ИСО 1 производится компенсация ошибок акселерометров, вызванных вращением связанной системы координат. Далее происходит перерасчет ускорений из связанной в навигационную систему. Матрицу направляющих косинусов между связанной и навигационной системами координат рассчитывают (обычно через кватернионные преобразования) по угловым скоростям связанной и навигационной систем координат. При этом сигналы угловых скоростей связанной системы координат поступают непосредственно из системы 1 "грубых" чувствительных элементов датчиков, а угловые скорости навигационной системы координат рассчитывают путем интегрирования ускорений навигационной системы. Второе интегрирование указанных ускорений обеспечивает определение приращений координат.
Из работы прототипа очевидно, что точность системы напрямую зависит от
погрешностей "грубых" чувствительных элементов.
Заявленный навигационный комплекс отличается от прототипа тем, что для устранения фактора влияния этих погрешностей в него дополнительно введены трехосевой магнитный компас 3 и гидростатический блок наклона ГБН 4.
Заявленный способ коррекции инерциальных датчиков системы ИСО навигационного комплекса осуществляется следующим образом.
В вычислительную платформу 2 с определенным интервалом времени поступает информация с трехосевого компаса 3. Величина этого инτepвaлá определяется из расчета дрейфа нуля гироскопа (датчика угловых скоростей) и в среднем составляет несколько минут. С гидростатического блока наклона 4 в вычислительнудо. платформу 2 также поступает информация. Платформа 2 осуществляет преобразование дифференциального давления в углы, на основе чего производит коррекцию углов ориентации.
Алгоритм расчета заключается в вычислении углов наклона измерителя α, β, γ относительно осей z, x, у. Ось z расположена строго вертикально. Информация о дифференциальном давлении ΔРх, ΔРу, ΔРz поступает из блока 4 чувствительных элементов - трех дифференциальных датчиков давления.
Искомое дифференциальное давление по вертикали ΔΡ вычисляется по формуле

Зная ΔΡ и его составляющие по всем осям, всегда можно вычислить угол наклона измерителя α относительно вертикали

Аналогично можно вычислить углы наклона β и γ по осям x и у, которые однозначно задают положение плоскости А1-А2, В1-В2 к горизонтальной плоскости. Угол β по оси x, и угол γ по оси у вычисляются по формулам


Вычислительная платформа 2 через определенное время после коррекции углов ориентации (интервал времени определяется дрейфом гироскопов) осуществляет вычисление матрицы направляющих косинусов между связанной и инерциальной системой и проводит компенсацию погрешностей акселерометров за счет учета вращения связанной системы координат. Полученные скорректированные значения участвуют в вычислении скоростей и координат.
Таким образом, по показаниям трехосевого магнитного компаса и трех дифференциальных датчиков давления, расположенных по трем ортогональным осям на концах равных по длине баз, вычисляют углы наклона между связанной и навигационной системами координат и угол азимута. Полученные значения используют для корректировки показаний инерциальных датчиков -акселерометров и гироскопов ИСО.
При таком алгоритме корректировки в вычислительной платформе 2 фактически происходит коррекция дрейфа гироскопов, которые работают в стабильно небольшой промежуток времени. В то же время гидростатический блок наклона плохо работает в верхнем слое океана, где наблюдается поверхностное волнение, и в этом случае используют показания гироскопов.
Время осреднения компаса может достигать несколько секунд. Иногда осреднение необходимо увеличивать до нескольких минут, например, при приближении грозового фронта.
Длину измерительной базы ГБН навигационной системы выбирают, в зависимости от того, на какой прибор будет устанавливаться навигационный комплекс и с какой точностью необходимо определять навигационный параметры.
При испытаниях, проведенных заявителем, Морским гидрофизическим институтом НАН Украины, в навигационном комплексе в ГБН были установлены три дифференциальных датчика давления фирмы Freescale Semiconductor.
Суммарная погрешность датчиков MPXV7002DP составляет 2,5%, в которую входит и погрешность от временной нестабильности. Диапазон измерения дифференциального давления ±2кПа. Расчетная длина базы не должна превышать:

где ΔΡ - величина диапазона дифференциального давления, кПа; ρ - плотность воды; g - величина ускорения свободного падения.
В нашем случае длина базы не должна превышать 40 см, что удовлетворяет * условию формулы 5. С учетом того, что на практике угол наклона гидрологических приборов (зондирующих, автоматических буйковых станций) не превышает ~40°, по формулам 2, 3 и 4 рассчитывают погрешность полученных углов. В среднем они составляют ~3° и зависят от точности дифференциальных датчиков давления, их диапазона измерения и длины измерительной базы ГБН.
В результате испытаний было установлено, что погрешность определения углов ГБН не превысила ~3° за 8 часов работы, а уход гироскопов по углу составил ~70° за это же время. Следовательно использование данного изобретения повысит точность определения навигационных параметров для углов в 23 раза.
Изобретения относятся к области приборостроения, являются средствами навигации, у которых система ориентации интегрирована с гидростатическим блоком наклона (ГБН) и трехосевым компасом, и могут быть использованы.для морских объектов.
Единый технический результат группы изобретений - повышение точности определения выходных навигационных параметров бесплатформенной инерциальной системы ориентации (углов ориентации, линейных скоростей и координат местоположения) за счет определения углов наклона между связанной и навигационной системами координат и определения угла азимута.
Сущность изобретения-устройства: бесплатформенный навигационный комплекс содержит инерциальную систему ориентации (ИСО) на "грубых" чувствительных элементах, которая подключена к вычислительной платформе и включает расположенные по трем ортогональным осям ИСО три акселерометра и три датчика угловых скоростей. Комплекс также содержит подключенные к вычислительной платформе трехосевой магнитный компас и гидростатический блок наклона (ГБН), содержащий три дифференциальных датчика гидростатического давления, расположенных по трем ортогональным осям ГБН на концах равных по длине баз.
Сущность изобретения-способа: по сигналам трех акселерометров и трех датчиков угловых скоростей, расположенных по трем ортогональным осям ИСО, вычисляют углы ориентации путем расчета матрицы направляющих косинусов между связанной и навигационной системами координат. Производят компенсацию погрешностей сигналов ускорений акселерометров, производят пересчет ускорений из связанной системы координат в навигационную систему и определяют текущие скорости и приращения координат. Производят измерения трехосевым магнитным компасом и тремя дифференциальными датчиками давления, расположенными по трем ортогональным осям на концах равных по
длине баз. По показаниям компаса и датчиков давления вычисляют углы наклона между связанной и навигационной системами координат, по показаниям компаса, вычисляют угол азимута. С учетом полученных значений углов наклона и азимута корректируют показания акселерометров и датчиков угловых скоростей. 2 н. п-та ф-лы.
1. Бесплатформенный навигационный комплекс с инерциальной системой ориентации на «грубых» чувствительных элементах, которая подключена к вычислительной платформе и содержит расположенные по трем ортогональным осям три акселерометра и три датчика угловых скоростей, отличающийся тем, что он дополнительно содержит подключенные к вычислительной платформе трехосевой магнитный компас и гидростатический блок наклона, содержащий три дифференциальных датчика гидростатического давления, расположенных по трем ортогональным осям на концах равных по длине баз.
2. Способ коррекции инерциальных датчиков бесплатформенного навигационного комплекса с инерциальной системой ориентации на «грубых» чувствительных элементах, заключающийся в том, что по сигналам трех акселерометров и трех датчиков угловых скоростей, расположенных по трем ортогональным осям, вычисляют углы ориентации путем расчета матрицы направляющих косинусов между связанной и навигационной системами координат, производят компенсацию погрешностей сигналов ускорений акселерометров, производят пересчет ускорений из связанной системы координат в навигационную систему и определяют текущие скорости и приращения координат, отличающийся тем, что дополнительно производят измерения трехосевым магнитным компасом и тремя дифференциальными датчиками давления, расположенными по трем ортогональным осям на концах, равных по длине баз, по показаниям компаса и датчиков давления вычисляют углы наклона между связанной и навигационной системами координат, по показаниям компаса вычисляют угол азимута, и с учетом полученных значений углов наклона и азимута корректируют показания акселерометров и датчиков угловых скоростей.

