Область техники
Изобретение относится к обучающей системе по исследованию принципа действия, конструкции и алгоритмов обработки информации инерциальных датчиков, а именно, к разработанному в рамках этой системы для технических вузов комплекту оборудования для лабораторного практикума по исследованию избыточного блока микромеханических гироскопов, акселерометров и магнитометров и алгоритмов обработки их информации.
Уровень техники
Известны блоки инерциальных датчиков, такие как:
- бесплатформенный инерциальный измерительный блок (патент РФ №2162203, МПК G01C 21/00),
- бесплатформенный инерциальный блок с избыточным количеством чувствительных элементов («Разработка конфигурации бесплатформенного инерциального блока с избыточном количеством чувствительных элементов» / Цуцаева Т.В. 2001, УДК 629.7.058.82),
- инерциальный измерительный блок (Водичева Л.В. «Повышение надежности и точности бесплатформенного инерциального измерительного блока при избыточном количестве измерителей» // Гироскопия и навигация. -1997. -1(16). - С. 55-67),
- универсальный навигационный прибор (патент РФ №226328821),
- бесплатформенный инерциальный измерительный блок разработки НПП «Антарес» (г. Саратов) на базе четырёх волоконно-оптических гироскопов и четырёх маятниковых кварцевых акселерометров (Водичева Л.В., Бельский Л.Н., Парышева Ю.В., Лысцов А.А. Инерциальные измерительные блоки перспективных изделий ракетно-космической техники: обеспечение отказоустойчивости // Вестник Самарского университета. Аэрокосмическая техника, технологии и машиностроение. 2018. Т. 17, № 1. С. 28-44. DOI: 10.18287/2541-7533-2018-17-1-28-44),
- шестиосный блок измерителей кажущегося ускорения с неортогональной ориентацией осей чувствительности (Нахов С.Ф. Опыт проектирования и изготовления блоков измерителей линейного ускорения на кварцевых маятниковых акселерометрах с аналоговой и цифровой системами управления: монография / С.Ф. Нахов, Д.М. Калихман, Л.Я. Калихман, Е.А. Депутатова, В.В. Скоробогатов, А.Ю. Николаенко; под ред. С.Ф. Нахова. Саратов: Сарат. гос. техн. ун-т, 2021. - 240 с.),
- блок бесплатформенной системы ориентации и включающая его система визуализации и регистрации движения подвижных объектов (патент РФ №2336496 С1, 2008 г.).
Использование указанных выше устройств в качестве оборудования для обучающей системы затруднено ввиду сложности конструкции, отсутствия возможности исследования влияния взаимной ориентации осей чувствительности акселерометров, уровня шумов датчиков, алгоритмов обработки информации на точность определения трех компонентов векторов кажущегося ускорения, угловой скорости и напряженности магнитного поля, моделирования работы избыточных блоков разной конфигурации и сопоставления теоретических и экспериментальных результатов, отсутствие современных беспроводных устройств связи блоков с вычислителем и визуализации процессов.
Наиболее близким аналогом является патент «Комплект лабораторного оборудования для изучения избыточного блока микромеханических акселерометров» (патент РФ № 86298 U1, 2009 г.), включающий поворотный стол, измерительный блок, состоящий из основания и акселерометров, установленных на отдельных печатных платах так, что их измерительные оси параллельны плоскости соответствующих печатных плат, многоканальный конвертер с аналого-цифровым преобразователем и буферной памятью, вычислительное устройство и систему визуализации, выходы акселерометров соединены со входами многоканального конвертера, а выход конвертера подключен к вычислителю с системой визуализации результатов, причем основание выполнено в виде правильной шестигранной призмы, на боковых гранях которой закреплены печатные платы с акселерометрами с помощью крепежных устройств, обеспечивающих возможность изменения углов поворота печатных плат вокруг осей, перпендикулярных плоскостям граней призмы.
Недостатки этого устройства при использовании его в качестве обучающей системы состоят в сложности конструкции измерительного блока, невозможности изучения характеристик гироскопов и магнитометров, невозможности использования стандартных инерциальных модулей для бесплатформенных инерциальных навигационных систем с тремя ортогональными осями чувствительности гироскопов, акселерометров и магнитометров в одном модуле, невозможности экспериментального исследования алгоритмов работы бесплатформенных инерциальных систем ориентации и навигации в автономном и корректируемом режимах.
Раскрытие сущности
Техническая проблема заключается в разработке возможности для изучения схем современных инерциальных измерительных модулей, состоящих из инерциальных датчиков (гироскопов и/или акселерометров и/или магнитометров), учебного исследования влияния степени избыточности на точность блока при измерении угловых скоростей, кажущихся ускорений и напряженности магнитного поля Земли, возможности исследовать влияние уровня шумов датчиков и алгоритмов обработки избыточной информации на точность определения трех компонент векторов угловой скорости, кажущегося ускорения, напряженности магнитного поля Земли, возможности изучения и экспериментального исследования бесплатформенных систем ориентации и навигации с визуализацией результатов исследования при одновременном упрощении конструкции и расширении функциональных возможностей изобретения.
Техническим результатом изобретения является расширение функциональных возможностей, а именно возможности исследования влияния степени резервирования, уровня шумов датчиков и влияния алгоритмов обработки избыточной информации на точность измерения угловой скорости, кажущегося ускорения и напряженности магнитного поля, возможность экспериментального исследования алгоритмов работы бесплатформенных инерциальных систем ориентации и навигации в автономном и корректируемом режимах.
Технический результат достигается тем, что в комплекте лабораторного оборудования для изучения избыточного блока инерциальных измерительных модулей, включающий размещенные на поворотном столе измерительный блок, содержащий закрепленные на основании инерциальные измерительные модули (ИИМ), многоканальный конвертер, вычислительный блок, при этом выходы ИИМ соединены со входами многоканального конвертера, подключенного к вычислительному блоку; и систему визуализации результатов, согласно решению, основание измерительного блока включает базовую и наклонную поверхности, на каждой из которых установлен инерциальный измерительный модуль, состоящий из трех ортогонально ориентированных инерциальных датчиков. Расположение ИИМ обеспечивает неортогональную ориентацию осей чувствительности по образующим конуса, образованного осями чувствительности двух ИИМ, с полууглом при вершине 54,74 град., причем оси чувствительности первого ИИМ совпадают с осями системы координат базовой поверхности основания, оси чувствительности второго повернуты вокруг оси, перпендикулярной наклонной поверхности, на угол 26,565 град., угол поворота наклонной поверхности в плоскости базовой поверхности составляет 63.435 град., а между плоскостями наклонной и базовой поверхности угол 48.19 град., при этом вычислительный блок снабжен модулем беспроводной связи для соединения с системой визуализации результатов.
Краткое описание чертежей
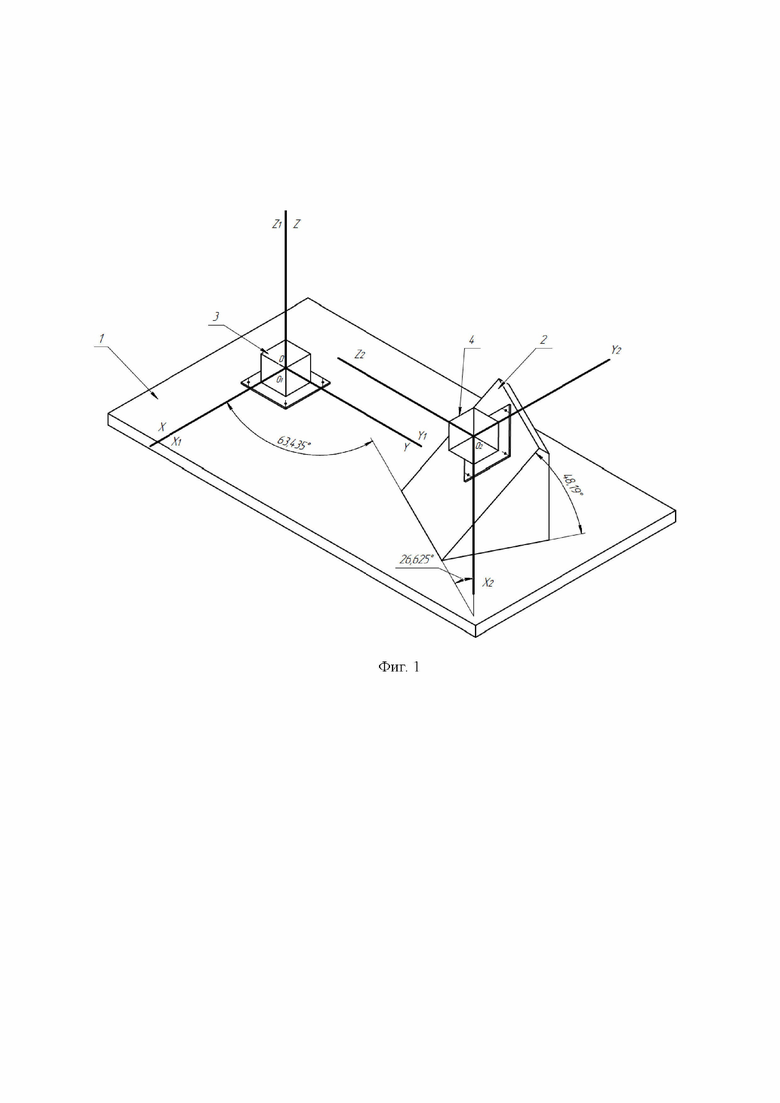
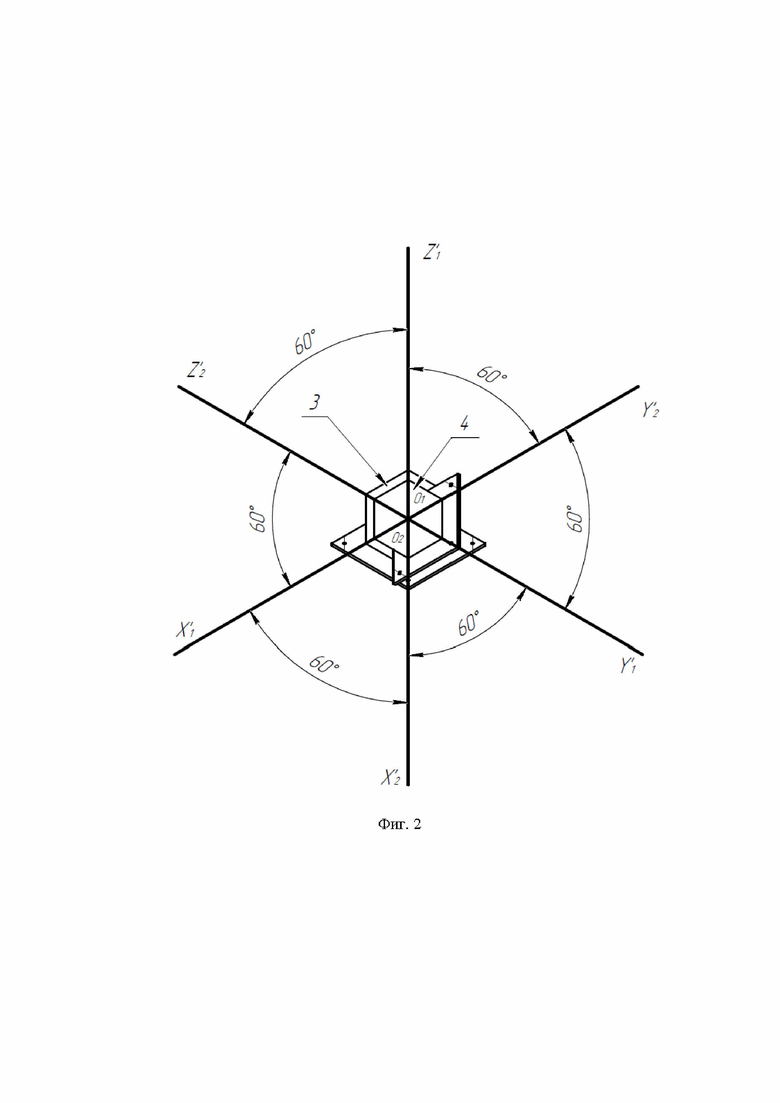
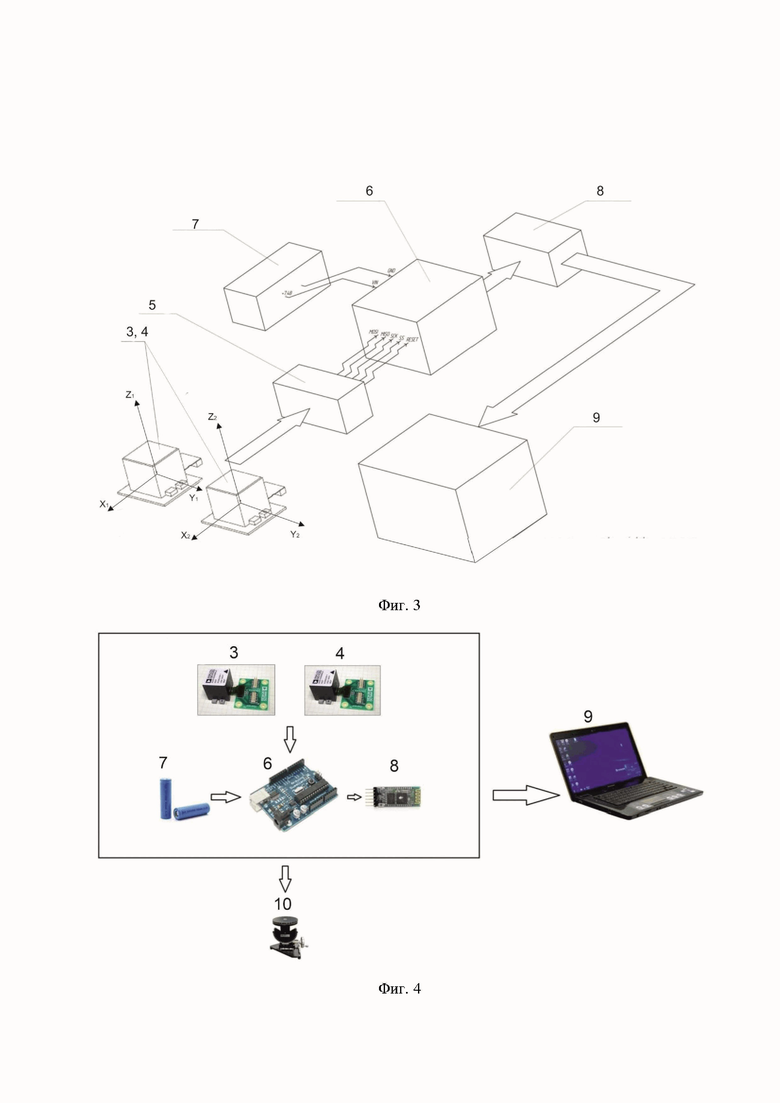
Сущность изобретения поясняется чертежами: на фиг. 1 показано размещение двух инерциальных измерительных модулей (ИИМ); на фиг. 2 приведены результаты определения углов между проекциями осей чувствительности двух ИИМ; на фиг. 3 приведена функциональная схема заявляемого комплекта; на фиг. 4 приведен состав макета лабораторной установки при осуществлении изобретения.
Позициями на чертежах обозначено:
1. базовая поверхность;
2. наклонная поверхность;
3. первый ИИМ;
4. второй ИИМ;
5. плата-переходник;
6. вычислительный блок;
7. аккумуляторные батареи;
8. модуль беспроводной связи bluetooth;
9. персональный компьютер;
10. поворотный стол.
Осуществление изобретения
В состав комплекта входят два инерциальных измерительных модуля 3 и 4, с ортогональными осями чувствительности гироскопов, акселерометров и магнитометров OiXiYiZi (i=1,2) в каждом ИИМ. ИИМ 3 расположен на базовой поверхности 1, а ИИМ 4 -на наклонной поверхности 2. Угол между базовой 1 и наклонной 2 поверхностями составляет 48,19 град., наклонная поверхность повернута относительно базовой на угол - 63,435 град. вокруг вертикальной оси OZ. Второй ИИМ 4 повернут вокруг оси O2Z2, перпендикулярной наклонной поверхности, на угол -26,566 град. Оси: OXYZ - опорная система координат, связанная с базовой поверхностью основания избыточного инерциального измерительного блока; O1X1Y1Z1 - трехгранник, связанный с первым ИИМ; O2X2Y2Z2 - трехгранник, связанный со вторым ИИМ.
Выходы ИММ 3 и 4 соединены со входами многоканального конвертера (плата - переходник) 5, подключенного к вычислительному блоку 6, который запитывается от аккумуляторных батарей 7.
Вычислительный блок 6 соединена с модулем беспроводной связи bluetooth 8, который подключен к персональному компьютеру 9 с системой визуализации результатов. Лабораторная установка размещается на поворотном столе 10.
Оси чувствительности первого ИИМ совпадают с осями основания с базовой поверхностью, оси чувствительности второго повернуты вокруг оси, перпендикулярной наклонной поверхности, на угол - 26,565 град. Угол поворота наклонной поверхности в плоскости базовой составляет 63,435 град., между плоскостями наклонной и базовой поверхности угол 48,19 град.
Результаты определения углов между осями чувствительности двух ИИМ (фиг. 2) получены в программе КОМПАС-3Д и подтверждают расположение шести осей чувствительности на образующих конуса с полууглом при вершине 54,74 град. равномерно через 60 град. в плоскости, перпендикулярной оси симметрии конуса. Начала систем координат O1X1Y1Z1 и O2X2Y2Z2 совмещены параллельным переносом. Ось симметрии конуса перпендикулярна плоскости O1X11,O1Y11,O1Z11,O2X21, O2Y21, O2Z21 - проекции осей чувствительности на плоскость, перпендикулярную оси симметрии конуса.
Заявляемое решение представляет собой лабораторную установку на базе двух микромеханических инерциальных измерительных модулей ADIS16405, содержащих в себе трехосные акселерометр, гироскоп и магнитометр, аппаратную вычислительную платформу Arduino Duemilanove с AVR микроконтроллером ATmega328 фирмы Atmel, поворотный стол и персональный компьютер (фиг. 4). Подключение микромеханических ИИМ ADIS16405 к аппаратной вычислительной платформе Arduino Duemilanove осуществлено через интерфейс SPI, схема подключения и код программы для считывания данных с ADIS16405 микроконтроллером ATmega328 и передачи данных на компьютер через виртуальный последовательный интерфейс разработаны авторами. Для обработки информации на компьютере используется программное обеспечение MatlabSimulink. Особенностью лабораторной установки является то, что она может передавать данные как по проводному интерфейсу USB, так и с использованием беспроводного модуля bluetooth. При беспроводном подключении установка питается от двух встроенных литий-ионных аккумуляторов типа 14500 с рабочим напряжением 3,7 В. Благодаря этому установка не имеет ограничений при поворотах.
Методика работы с установкой предусматривает три этапа.
На первом этапе проводится калибровка гироскопов, акселерометров и магнитометров, определяются погрешности нулевых сигналов, углы неортогональности осей чувствительности в каждом из двух ИИМ, исследуются шумы датчиков методом вариаций Аллана с определением статистических характеристик нулевых сигналов.
На втором этапе вычисляются оценки проекций векторов кажущегося ускорения, угловой скорости и напряженности магнитного поля Земли на оси основания  методами наименьших квадратов (1) или максимального правдоподобия (2) (Степанов О.А. Основы теории оценивания с приложениями к задачам обработки навигационной информации. Ч.1. Введение в теорию оценивания. - СПб.: ГНЦ РФ ЦНИИ “Электроприбор”, 2009. - 496 c.).
методами наименьших квадратов (1) или максимального правдоподобия (2) (Степанов О.А. Основы теории оценивания с приложениями к задачам обработки навигационной информации. Ч.1. Введение в теорию оценивания. - СПб.: ГНЦ РФ ЦНИИ “Электроприбор”, 2009. - 496 c.).
 (1)
(1)
 (2)
(2)
В этих выражениях:
 - выходные сигналы датчиков;
- выходные сигналы датчиков;
- оценки проекций векторов кажущегося ускорения, угловой скорости и напряженности магнитного поля Земли на оси основания;
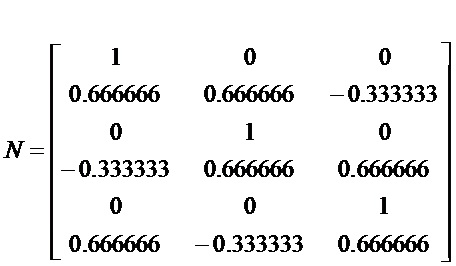
N - матрица направляющих косинусов осей чувствительности датчиков по отношению к опорным осям основания OXYZ.
R - ковариационная матрица ошибок датчиков, диагональными элементами которой являются дисперсии показаний датчиков  (i=1, 2, …6), определенные на первом этапе.
(i=1, 2, …6), определенные на первом этапе.
Далее вычисляются ковариационные матрицы ошибок оценивания векторов кажущегося ускорения, угловой скорости и напряженности магнитного поля и след этих матриц.
 (3)
(3)
 (4)
(4)
После чего делается вывод о точности оценивания каждым из алгоритмов.
Влияние степени избыточности блока датчиков на его точность проверяется обработкой этой же информации по алгоритму (1), в котором поочередно обнуляется одна, две или три строки матрицы N, это соответствует блокам из пяти, четырех или трех датчиков. Погрешности оценок вычисляются аналогично.
Влияние уровня шумов датчиков на погрешности оценок компонент векторов угловой скорости, кажущегося ускорения и напряженности магнитного поля Земли исследуется изменением величины диагональных элементов матрицы R и повторением обработки информации по алгоритмам (2) и (3).
На третьем этапе исследуется точность определения ориентации и координат объекта с помощью бесплатформенной системы ориентации и навигации. Программа обработки информации предусматривает определение ориентации объекта в углах Эйлера - Крылова, направляющих косинусах, параметрах Родрига - Гамильтона и кватернионах (Основы построения бесплатформенных инерциальных навигационных систем/ В.В. Матвеев, В.Я. Распопов // - СПб. ГНЦ РФ ОАО «Концерн «ЦНИИ Электроприбор», 2009, - 280 с.). Входными данными являются оценки Wx,Wy,Wz, вычисляемые по алгоритму (1). Выходными - оценки углов поворота платформы стола по каждому из алгоритмов. При этом направляющие косинусы, параметры Родрига - Гамильтона и кватернионы пересчитываются в углы Эйлера - Крылова по известным формулам (Лурье А.И. Аналитическая механика. - М.: Физматгиз, 1961. - 824 с.). Полученные результаты сравниваются с действительным углом поворота платформы стола. Изобретение позволяет также исследовать влияние погрешностей датчиков ИИМ, порядка точности алгоритмов, величины периода квантования сигналов датчиков на погрешности бесплатформенной инерциальной системы ориентации.
По окончании обработки результаты демонстрируются в виде таблиц и графиков.
Таким образом, предлагаемое решение позволяет на современном научно-техническом уровне, в наглядной форме обеспечить изучение студентами схем построения инерциальных измерительных модулей, методики их испытаний, алгоритмов обработки их информации в бесплатформенной инерциальной системе ориентации и экспериментальных исследований с компьютерной обработкой и визуализацией результатов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ БЕСПЛАТФОРМЕННОЙ ОРИЕНТАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2022 |
|
RU2784859C1 |
| Способ измерения ошибок начальной выставки инерциальной навигационной системы без привязки к внешним ориентирам | 2021 |
|
RU2779274C1 |
| СПОСОБ АВТОНОМНОЙ ОРИЕНТАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2017 |
|
RU2653967C1 |
| СПОСОБ КАЛИБРОВКИ ПАРАМЕТРОВ БЕСПЛАТФОРМЕННОГО ИНЕРЦИАЛЬНОГО ИЗМЕРИТЕЛЬНОГО МОДУЛЯ | 2004 |
|
RU2269813C2 |
| Способ автономной ориентации объектов в околоземном пространстве | 2022 |
|
RU2787971C1 |
| БЛОК БЕСПЛАТФОРМЕННОЙ СИСТЕМЫ ОРИЕНТАЦИИ И ВКЛЮЧАЮЩАЯ ЕГО СИСТЕМА ВИЗУАЛИЗАЦИИ И РЕГИСТРАЦИИ ДВИЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2007 |
|
RU2336496C1 |
| СПОСОБ АВТОНОМНОЙ ИНЕРЦИАЛЬНОЙ ОРИЕНТАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2022 |
|
RU2800846C1 |
| БЕЗПЛАТФОРМЕННЫЙ НАВИГАЦИОННЫЙ КОМПЛЕКС С ИНЕРЦИАЛЬНОЙ СИСТЕМОЙ ОРИЕНТАЦИИ НА "ГРУБЫХ" ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТАХ И СПОСОБ КОРРЕКЦИИ ЕГО ИНЕРЦИАЛЬНЫХ ДАТЧИКОВ | 2014 |
|
RU2548115C1 |
| НАВИГАЦИОННАЯ СИСТЕМА И КОРПУС НАВИГАЦИОННОЙ СИСТЕМЫ | 2018 |
|
RU2702845C1 |
| СИСТЕМА ПОЗИЦИОНИРОВАНИЯ ТРАССЫ ПОДЗЕМНОГО ТРУБОПРОВОДА | 1999 |
|
RU2152059C1 |
Изобретение относится к оборудованию для исследований микромеханических приборов. Сущность решения заключается в том, что в комплекте для изучения избыточного блока инерциальных измерительных модулей (ИИМ), включающем измерительный блок с закрепленными ИИМ, многоканальным конвертером, вычислительным блоком, системой визуализации результатов, основание измерительного блока включает базовую и наклонную поверхности, на каждой из которых установлен ИИМ, состоящий из трех ортогонально ориентированных датчиков. Расположение ИИМ обеспечивает неортогональную ориентацию осей чувствительности по образующим конуса, образованного осями чувствительности двух ИИМ, с полууглом при вершине 54,74°, причем оси чувствительности первого ИИМ совпадают с осями системы координат базовой поверхности основания, оси чувствительности второго повернуты вокруг оси, перпендикулярной наклонной поверхности, на угол 26,565°, угол поворота наклонной поверхности в плоскости базовой поверхности составляет 63,435°, а между плоскостями наклонной и базовой поверхности угол 48,19°, при этом вычислительный блок снабжен модулем беспроводной связи для соединения с системой визуализации. Техническим результатом изобретения является расширение функциональных возможностей. 4 ил.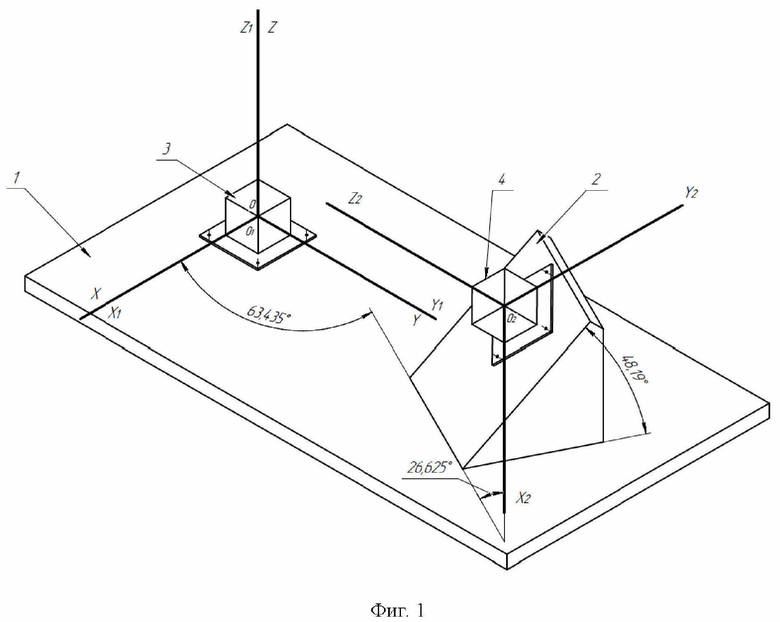
Комплект лабораторного оборудования для изучения избыточного блока инерциальных измерительных модулей, включающий размещенный на поворотном столе измерительный блок, содержащий основание с базовой поверхностью и наклонной поверхностью, угол между которыми составляет 48,19°, на каждой из которых расположен инерциальный измерительный модуль (ИИМ), состоящий из трёх датчиков с ортогональными осями чувствительности, плату-переходник, выполненную в виде многоканального конвертера, вычислительный блок, модуль беспроводной связи, а также систему визуализации результатов, при этом выходы двух ИИМ соединены с входами многоканального конвертера, выход которого соединён с входами вычислительного блока, выход которого связан с системой визуализации результатов, при этом расположение двух ИИМ обеспечивает неортогональную ориентацию осей чувствительности датчиков по образующим конуса, образованного осями чувствительности двух ИИМ, с полууглом при вершине 54,740°, причем оси чувствительности первого ИИМ совпадают с осями системы координат базовой поверхности основания, оси чувствительности второго ИИМ повернуты вокруг оси, перпендикулярной наклонной поверхности, на угол 26,565°, угол поворота наклонной поверхности в плоскости базовой поверхности составляет 63,435°.
| Цилиндрическая вальцовка | 1949 |
|
SU86298A1 |
| СПОСОБ КОМПЛЕКСНЫХ ИСПЫТАНИЙ БЕСПЛАТФОРМЕННЫХ ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ БЛОКОВ НА ОСНОВЕ МИКРОМЕХАНИЧЕСКИХ ГИРОСКОПОВ И АКСЕЛЕРОМЕТРОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2256880C1 |
| СПОСОБ НАСТРОЙКИ ГИРОСКОПА | 2004 |
|
RU2253840C1 |
| СПОСОБ СНЯТИЯ ХАРАКТЕРИСТИК ЭЛЕКТРОВАКУУМНЫХ И ПОЛУПРОВОДНИКОВЫХ ПРИБОРОВ | 0 |
|
SU169585A1 |
| US 9664512 B2, 30.05.2017 | |||
| US 11215475 B2, 04.01.2022. | |||
