Область техники, к которой относится изобретение
Изобретение относится к измерительному устройству для определения абсолютного угла поворота вращающегося измеряемого объекта.
Уровень техники
Из заявки DE 19821467 A1 известен одно-, двух- или многомерный дифференциал для измерения с высокой разрешающей способностью числа целочисленных оборотов вала. В простейшем случае одномерного дифференциала используются лишь два зубчатых колеса. По количеству зубьев они отличаются друг от друга на один зуб. Одно из зубчатых колес насажено непосредственно на подлежащий измерению вал и приводит в действие второе зубчатое колесо. На основании углового положения обоих зубчатых колес относительно друг друга может быть определено число оборотов вала.
В заявке DE 19821467 A1 представлен, кроме того, двухмерный дифференциал с тремя зубчатыми колесами, причем первое зубчатое колесо опять же придано подлежащему измерению валу, в то время как оба других зубчатых колеса непосредственно и/или косвенно приводятся в действие первым зубчатым колесом. Число целочисленных оборотов определяется на основании основных комбинаций, которые возникают для различных значений числа оборотов зубчатых колес и которые возможны при определенных значениях числа оборотов отдельных зубчатых колес. С целью достижения однозначности в отношении числа целочисленных оборотов для различных значений числа оборотов рассчитываются нормированные основные значения, которые записываются в память в двухмерном числовом поле. При этом нормированные основные значения служат в качестве координат памяти, на основании которых могут определяться значения целочисленного числа оборотов. Недостаток известного решения следует видеть в том, что разрешающая способность лежит в диапазоне одного целочисленного оборота. С помощью известного решения невозможно, сверх того, актуальное определение точной угловой позиции вала измеряемого объекта.
Применительно к сервоприводам уже известен многооборотный цилиндрический редуктор с высокой разрешающей способностью для измерения абсолютного угла поворота. В случае известного цилиндрического редуктора используются несколько связанных между собой ступеней зубчатого редуктора. При предпочтительном решении многооборотного цилиндрического редуктора используются 23 зубчатых колеса и пять позиционных датчиков. В целях минимизации люфтов в отдельных расположенных друг за другом ступенях зубчатого редуктора отдельные ступени зубчатого редуктора должны изготавливаться с высокой точностью.
Раскрытие изобретения
В основу изобретения положена задача, заключающаяся в создании несложного и недорогого измерительного устройства для определения абсолютного угла поворота вращающегося измеряемого объекта.
Задача решается тем, что на валу измеряемого объекта расположено первое зубчатое колесо, которое непосредственно или косвенно входит в зацепление с по меньшей мере одним вторым зубчатым колесом и одним третьим зубчатым колесом, и количество зубьев отдельных зубчатых колес различно для отдельных зубчатых колес. Кроме того, каждое зубчатое колесо снабжено сельсин-датчиком, который распознает угол поворота соответствующего зубчатого колеса, причем предусмотрен решающий блок, который определяет по меньшей мере разность углов поворота первого зубчатого колеса и второго зубчатого колеса и разность углов поворота первого зубчатого колеса и третьего зубчатого колеса, и на основании подсчета итога разностей определенных углов поворота зубчатых колес определяет число целочисленных оборотов и оставшийся угол поворота вала измеряемого объекта. Далее, предпочтительным считается случай, если нормирование осуществляется на геометрический шаг подсчета итога разностей определенных углов поворота.
Соответствующее изобретению измерительное устройство позволяет осуществлять измерение точной фактической угловой позиции вала измеряемого объекта в комбинации с оценкой целочисленного числа оборотов вала.
Соответствующий изобретению дифференциальный датчик положения содержит предпочтительно три связанных между собой зубчатых колеса, причем зубчатые колеса имеют различные количества зубьев. Зубчатые колеса могут быть выполнены в качестве цилиндрических зубчатых колес, и/или в качестве зубчатых колес с внутренним зацеплением, и/или в качестве зубчатых ремней, и/или в качестве цепных колес, и/или в качестве фрикционных колес. В случае фрикционных колес различие в количестве зубьев не ограничено целыми положительными числами. Проще говоря, различие в количестве зубьев может соответствовать любому положительному действительному числу больше единицы.
С помощью соответствующего изобретению дифференциального датчика положения могут быть в существенной мере устранены проблемы с люфтами в ступенях зубчатого редуктора. Поскольку количество ступеней зубчатого редуктора при соответствующем изобретению измерительном устройстве существенно уменьшается применительно к известному решению, достигается возможность рентабельной и компактной реализации соответствующего изобретению измерительного устройства. По этой причине оно без проблем может быть соединено с валом вращающегося измеряемого объекта. В измерительном устройстве согласно изобретению особо предпочтительным является то, что для настройки и функционального испытания измерительного устройства, например, на стадии изготовления, достаточно одного простого оборота всех трех зубчатых колес. Тем самым также обеспечивается возможность проведения быстрого функционального испытания измерительного устройства без больших затрат.
Предпочтительное исполнение соответствующего изобретению измерительного устройства предлагает, что для определения угла поворота отдельных зубчатых колес используются оптические, магнитные и/или электромеханические сельсин-датчики. Впрочем, предпочтительно также использование датчиков Холла.
На основании соответствующего угла поворота всех зубчатых колес соответственно определяется угол поворота в градусах. Разность углов поворота между вторым зубчатым колесом и первым зубчатым колесом и между третьим зубчатым колесом и первым зубчатым колесом используется для определения целочисленных оборотов вала измеряемого объекта, на котором укреплено первое зубчатое колесо. Впрочем, количество зубьев зубчатых колес различается на один зуб, а именно таким образом, что разность количества зубьев первого зубчатого колеса и второго зубчатого колеса и разность количества зубьев первого зубатого колеса и третьего зубчатого колеса соответственно равна единице. Если, например, первое зубчатое колесо придано валу измеряемого объекта и его количество зубьев составляет 25, то в этом случае количество зубьев второго зубчатого колеса составляет 26, а количество зубьев третьего зубчатого колеса составляет 24.
На основании разницы в количестве зубьев первого зубчатого колеса относительно второго зубчатого колеса и первого зубчатого колеса относительно третьего зубчатого колеса, причем разница равна dZ и причем dZ больше единицы или равно единице, общее угловое разрешение измерительного устройства подразделяется на n главных сегментов. При этом величина n больше единицы или равна единице. Решающий блок определяет приданный соответствующему абсолютному углу главный сегмент на основании относительных позиций зубчатых колес.
Далее, во взаимосвязи с соответствующим изобретению измерительным устройством предусмотрено, что решающий блок определяет многообротное разрешение http://TurnR.es при определении абсолютного угла с использования частичного разрешения ТА следующим образом, причем ТА представляет собой угловое разрешение главного сегмента:
TurnRes=n·TA
При этом TurnRes ∈ N и n ∈ N и TurnRes≥TA, причем TurnRes представляет собой многооборотное разрешение при минимально возможном значении n.
Предпочтительным исполнением соответствующего изобретению измерительного устройства предусматривается, что датчик углового положения зубчатого колеса, которое придано валу измеряемого объекта, непосредственно распознает остаточный угол поворота, читайте: многооборотное разрешение. Альтернативно предлагается, что решающий блок при расчете целочисленных оборотов определяет остаточный угол поворота, читайте: многооборотное разрешение, на основании разрядов после запятой, причем для нормирования на подъем SumDiff предпочтительно используется следующее уравнение:

причем zHA≤n и zHA представляет собой главный сегмент НА, приданный соответствующему абсолютному углу. Целочисленная доля от Turn представляет собой количество полных оборотов вала изменяемого объекта, в то время как разряды после запятой описывают статочный угол поворота. SumDiff представляет собой сумму разностей углов φz1, φZ2, φz3 отдельных зубчатых колес Z1, Z2, Z3 и рассчитывается по следующей формуле:
SumDiff=2·φz1·φz2·φz3.
С целью компенсации возникающих при определении угла поворота неточностей и люфтов в редукторе измерительного устройства предпочтительным исполнением соответствующего изобретению измерительного устройства предлагается следующее: Решающий блок на основании формирования разности определенных углов поворота второго зубчатого колеса и третьего зубчатого колеса подразделяет угловое разрешение измерительного устройства на подразделы UA. При этом количество подразделов зависит от количества зубьев первого зубчатого колеса. В частности, геометрический шаг подразделов UA больше геометрического шага подразделов zHA.
Соответствующее изобретению измерительное устройство применительно к исполнительному звену или исполнительному элементу предпочтительно используется в технике автоматизации или технологии. Понятно, однако, что соответствующее изобретению измерительное устройство ни в коей мере не ограничивается только этим использованием. Например, соответствующее изобретению измерительное устройство может использоваться также применительно к печатных машинам или автомобилям.
При использовании соответствующего изобретению измерительного устройства применительно к исполнительному звену или исполнительному элементу в случае измеряемого объекта речь идет предпочтительно о приводном вале и/или вале отбора мощности сервопривода, который служит для приведения в действие арматуры. По этой причине приводной вал соединен с исполнительным элементом. В случае исполнительного элемента речь идет об электродвигателе и/или регулировочном маховичке или маховичке. Арматура связана с валом отбора мощности. С целью уменьшения высокого числа оборотов электродвигателя до относительно низкого числа оборотов арматуры во многих случаях использования между исполнительным элементом и арматурой обычно установлена понижающая передача.
Краткое описание чертежей
Изобретение поясняется более подробно на основании следующих чертежей, которые показывают:
фиг.1 показывает схематическое изображение исполнительного звена или исполнительного элемента;
фиг.2 показывает схематическое изображение одного исполнения соответствующего изобретению измерительного устройства;
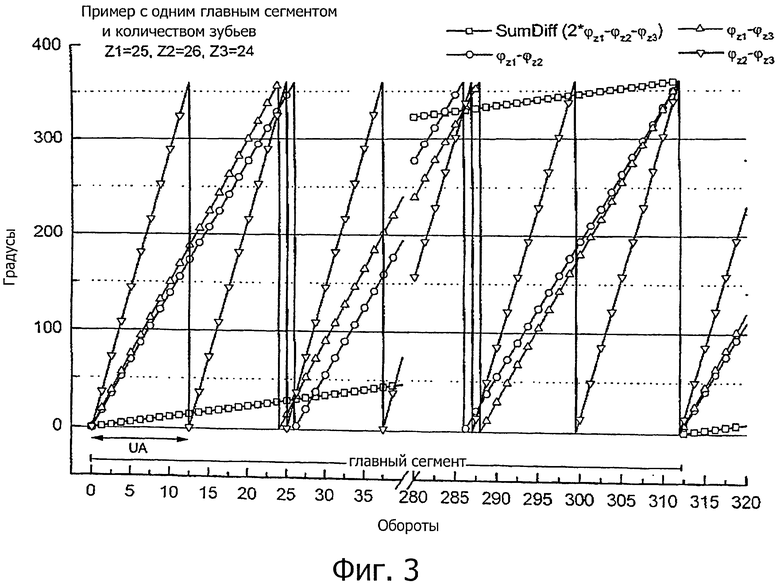
фиг.3 показывает первую диаграмму, которая поясняет многооборотное разрешение при наличии одного главного сегмента;
фиг.4 показывает вторую диаграмму, которая поясняет многооборотное разрешение при наличии двух главных сегментов.
Осуществление изобретения
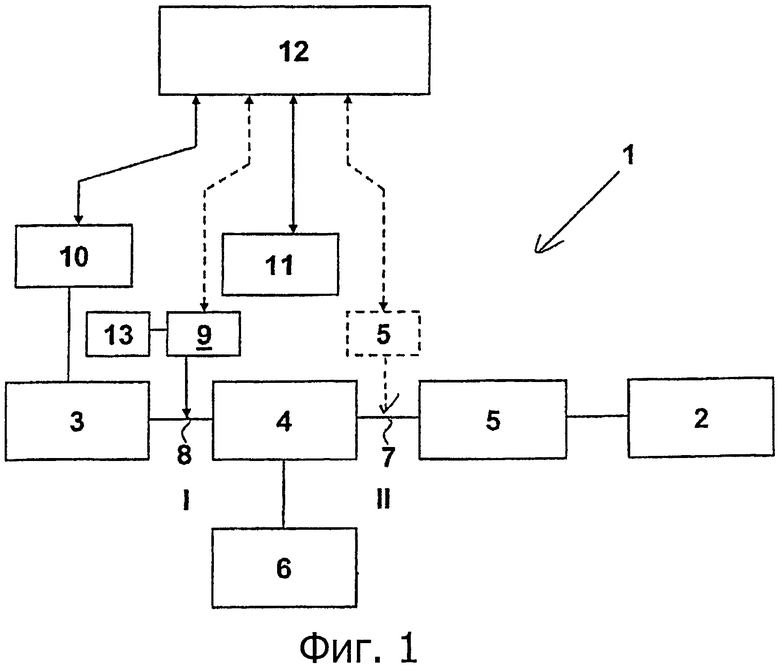
Фиг.1 показывает схематическое изображение исполнительного звена 1 или исполнительного элемента 1 для приведения в действие арматуры 2. В случае арматуры 2 речь идет, например, о вентиле, золотниковом клапане, дросселе или заслонке. Исполнительное звено 1 или исполнительный элемент 1 обычно состоит из электродвигателя 3 с соответствующей сенсорной техникой 10, сервопривода 4 с соответствующей сенсорной техникой 11, понижающей передачи 5 и арматуры 2. Управление исполнительным звеном 1 осуществляется с помощью блока 12 управления. Блок 12 управления может быть встроенным в сервопривод 4, он может монтироваться на сервоприводе 4 или быть выполнен в качестве отдельного компонента. Используемые в технологии производства или технологии сервоприводы 4 для арматур 2 выполнены, напротив, таким образом, что они при низких значениях числа оборотов (4-180 об/мин) могут передавать высокие крутящие моменты (30-630.000 Нм), причем передаваемый крутящий момент должен иметь высокое постоянство также при малых углах поворота.
Передача крутящего момента между электродвигателем 3 и арматурой 2 осуществляется через понижающую передачу 5. Понижающая передача необходима для преобразования высокого числа оборотов электродвигателя 3 в желаемое и в существенной мере неизменное число оборотов вала отбора мощности для приведения в действие арматуры 2. В качестве понижающей передачи 5 могут использоваться различные редукторы. Можно назвать, например, коническую зубчатую передачу или цилиндрическую зубчатую передачу, червячную зубчатую передачу, зубчатую передачу с угловым сдвигом или рычажную передачу. Диапазон крутящего момента при вращающихся приводах простирается до крутящего момента 32.000 Нм; при качающихся приводах могут быть реализованы крутящие моменты до 630.000 Нм.
Для выполнения требований стандарта безопасности, заданного в автоматизации процессов и технологий, должна быть обеспечена возможность эксплуатации сервопривода в случае аварии с помощью маховичка 6, отдельно приводимого в действие. В соответствии с этим этот маховичок 6 используется также при вводе в эксплуатацию или повторном вводе в эксплуатацию после возникновения сбоя в работе. В случае маховичка 6 речь идет обычно о маховичке, который вручную приводится в действие обслуживающим персоналом, за счет чего арматура 2 может быть переведена в желаемую позицию.
Для разделения режимов ручного приведения в действие и приведения в действие электродвигателем предусмотрен не изображенный специально на фиг.1 стыковочный механизм. Стыковочный механизм обычно выполнен и/или расположен таким образом, что в режиме приведения в действие электродвигателем электродвигатель 3 непосредственно соединен с валом 7 отбора мощности, а маховичок отсоединен, в то время как в режиме ручного приведения в действие вал 7 отбора мощности соединен с маховичком 6, а электродвигатель 3 отсоединен. За счет этого обеспечивается возможность разделения между режимами приведением в действие электродвигателем и ручного приведения в действие. В частности, стыковочный механизм выполнен таким образом, что маховичок 6 автоматически отсоединяется от приводного вала 8, пока сервопривод 4 функционирует в режиме приведения в действие электродвигателем - то есть режим приведения в действие электродвигателем имеет приоритет перед режимом ручного приведения в действие. Соответствующие сервоприводы 4 предлагаются и продаются заявительницей.
Определение угла φz1 поворота приводного вала 8 или вала 7 отбора мощности осуществляется с помощью соответствующего изобретению измерительного устройства 1, которое описывается более подробно в последующих фигурах. С помощью ссылочных обозначений I и II на фиг.1 маркированы различные позиции, в которых соответствующее изобретению измерительное устройство 1 может монтироваться в исполнительном звене 1. В то время как позиционирование измерительного устройства 1 в соответствии с позицией I осуществляется предпочтительно в совокупности с использованием поворотного привода, позиционирование измерительного устройства 1 в соответствии с позицией II осуществляется с использованием вращающегося привода.
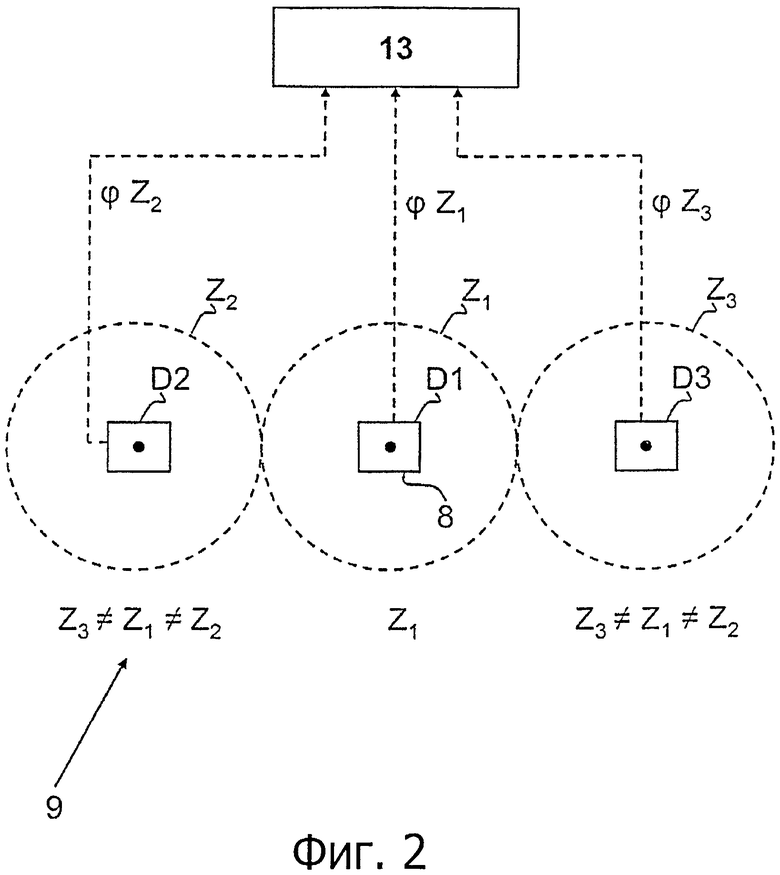
Фиг.2 показывает схематическое изображение исполнения соответствующего изобретению измерительного устройства, состоящего из трех соединенных между собой зубчатых колес Z1, Z2, Z3, причем зубчатое колесо Z1 имеет количество z1 зубьев, причем зубчатое колесо Z2 имеет количество z2 зубьев и причем зубчатое колесо Z3 имеет количество z3 зубьев. Количества z1, z2, z3 зубьев зубчатых колес Z1, Z2, Z3 различаются между собой. В частности, разница в количестве зубьев между зубчатым колесом Z1 и зубчатым колесом Z2 или зубчатым колесом Z1 и зубчатым колесом Z3 составляет соответственно один зуб. В показанном случае зубчатое колесо Z1 придано валу 8, 9 вращающегося измеряемого объекта. Зубчатые колеса Z2, Z3 находятся в непосредственном зацеплении с зубчатым колесом Z1.
Каждому зубчатому колесу Z1, Z2, Z3 придан один сельсин-датчик DI, D2, D3, который распознает угол φz1, φz2, φz3 поворота приданного зубчатого колеса Z1, Z2, Z3. Угол φz1, φz2, φz1 поворота отдельных зубчатых колес Z1, Z2, Z3 распознается с помощью оптических, магнитных и/или электромеханических сельсин-датчиков D1, D2, D3.
Далее, предусмотрен решающий блок 13, который определяет по меньшей мере разность φz1-φz2 угла поворота второго зубчатого колеса Z2 относительно первого зубчатого колеса Z1 и разность φz1-φz3 угла поворота третьего зубчатого колеса Z3 относительно первого зубчатого колеса Z1 и на основании подсчета итога
SumDiff=(φz1-φz2)+(φz1-φz3) разностей φz1-φz2, φz1-φz3 определенных углов φz1, φz2, φz3 поворота зубчатых колес Z1, Z2, Z3 определяет количество целочисленных оборотов и остаточный угол φz1 поворота вала измеряемого объекта.
Решающий блок 13 определяет многооборотное разрешение при определении абсолютного угла φz1 поворота вала вращающегося измеряемого объекта с использованием частичного разрешения ТА, предпочтительно с помощью следующего уравнения:
TurnRes=n·TA
Сельсин-датчик D1 зубчатого колеса Z1, которое придано валу 8 измеряемого объекта, определяет остаточный угол φz1 поворота предпочтительно непосредственно. Альтернативно решающий блок 13 определяет остаточный угол φz1 поворота на основании разрядов после запятой при расчете целочисленных оборотов, причем предпочтительно используется следующее уравнение:

Фиг.3 показывает диаграмму, которая поясняет многооборотное разрешение TurnRes с одним главным сегментом НА, то есть с n=1. на ось x нанесено количество целочисленных оборотов; на ось у нанесены в градусах различные разности углов поворота отдельных зубчатых колес. В показанном случае в главном сегменте 312 выполняются целочисленные обороты. Однозначное определение целочисленных оборотов возможно на основании суммы SumDiff разностей углов φz1, φz2, φz3 поворота зубчатых колес Z1, Z2, Z3.
Далее, на фиг.3, равно как и на фиг.4 показаны разности φz1-φz2, φz2-φz3, φz1-φz3 определенных углов φz1, φz2, φz3 поворота первого зубчатого колеса Z1, второго зубчатого колеса Z2 и третьего зубчатого колеса Z3. Соответствующие кривые имеют различный геометрический шаг, в результате чего TurnRes измерительного устройства 9 подразделяется на вспомогательные сегменты UA. Первый вспомогательный сегмент кривой φz2-φz3 показан на фиг.3 в качестве примера. Количество вспомогательных сегментов UA кривой φz2-φz3 зависит от количества z1 зубьев первого зубчатого колеса Z1. Поскольку количество z1 зубьев первого зубчатого колеса Z1 равно 25, в показанном случае 25 существуют, следовательно, 25 вспомогательных сегментов UA кривой φz2-φz3. Количество z1, z2, z3 зубьев зубчатых колес Z1, Z2, Z3 выбрано таким образом, что геометрический шаг вспомогательных сегментов UA, с i=1, … n имеет боле высокий геометрический шаг по сравнению с геометрическим шагом главных сегментов НА или главного сегмента НА. На основании кривых, которые воспроизводят разности углов φz1-φz2 или φz1-φz3 или φz1-φz3 поворота первого, второго и третьего зубчатого колеса Z1, Z2, Z3 может производиться более точное определение разрешения и определение остаточного угла φz1 поворота вала 8 измеряемого объекта.
Фиг.4 показывает диаграмму, поясняющую многооборотное разрешение TurnRes с двумя главными сегментами НА. При этом решающий блок 13 на основании разницы в количестве зубьев между первым зубчатым колесом Z1 и вторым зубчатым колесом Z2 и первым зубчатым колесом Z1 и третьим зубчатым колесом Z3, причем разница равна dZ, причем dZ больше единицы или равно единице, подразделяет общее угловое разрешение измерительного устройства 9 на n главных сегментов НА. В соответствии с этим решающий блок 13 определяет соответствующий главный сегмент zHA на основании соответствующих позиций φz1, φz2, φz3 зубчатых колес Z1, Z2, Z3.
Перечень ссылочных обозначений
1 Исполнительное звено/исполнительный элемент
2 Арматура
3 Электродвигатель
4 Сервопривод
5 Понижающая передача
6 Исполнительный маховичок/маховичок
7 Вал отбора мощности
8 Приводной вал
9 Измерительное устройство для определения абсолютного угла поворота
10 Сенсорная техника электродвигателя
11 Сенсорная техника сервопривода
12 Система управления
13 Решающий блок
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ УГЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2480707C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ ЗУБЧАТЫХ РЕДУКТОРОВ | 1993 |
|
RU2035714C1 |
| ЗУБЧАТАЯ ПЕРЕДАЧА (ВАРИАНТЫ) | 2009 |
|
RU2502903C2 |
| ЗУБЧАТАЯ ПЕРЕДАЧА (ВАРИАНТЫ) | 2007 |
|
RU2342572C1 |
| АВТОМОБИЛЬНАЯ КОРОБКА ПЕРЕДАЧ | 2012 |
|
RU2520612C2 |
| АВТОМОБИЛЬНАЯ КОРОБКА ПЕРЕДАЧ | 2024 |
|
RU2841246C1 |
| БЕЗВОДИЛЬНАЯ ПЛАНЕТАРНАЯ ПЕРЕДАЧА | 1999 |
|
RU2169867C2 |
| АВТОМАТИЧЕСКОЕ РЕГУЛИРУЮЩЕЕ УСТРОЙСТВО | 1934 |
|
SU45663A1 |
| Способ определения плавности вращения редуктора | 2021 |
|
RU2765520C1 |
| РЕДУКТОР ВОЗДУШНОГО ВИНТА ДЛЯ ТУРБОВИНТОВОГО АВИАЦИОННОГО ДВИГАТЕЛЯ | 2004 |
|
RU2272195C1 |

Изобретение относится к измерительному устройству (9) для определения абсолютного угла (φ) поворота вращающегося измеряемого объекта, причем валу (8) измеряемого объекта придано первое зубчатое колесо (Z1), причем первое зубчатое колесо (Z1) непосредственно или косвенно входит в зацепление с по меньшей мере одним вторым зубчатым колесом (Z2) и одним третьим зубчатым колесом (Z3) и причем количество (z1, z2, z3) зубьев отдельных зубчатых колес (Z1, Z2, Z3) является различным, причем каждому зубчатому колесу (Z1, Z2, Z3) придан сельсин-датчик (D1, D2, D3), который распознает угол (z1, z2, z3) поворота приданного зубчатого колеса (Z1, Z2, Z3), причем предусмотрен решающий блок, который определяет по меньшей мере разность (z1-z2) углов поворота второго зубчатого колеса (Z2) относительно первого зубчатого колеса (Z1) и разность (z1-z2) углов поворота третьего зубчатого колеса (Z3) относительно первого зубчатого колеса (Z1) и на основании подсчета итога (SumDiff=(z1-z2)+(z1-z3)) разностей (z1-z2, z1-z3) определенных углов (z1, z2, z3) поворота зубчатых колес (Z1, Z2, Z3) определяет количество целочисленных оборотов и остаточный угол (z1) поворота вала измеряемого объекта. 10 з.п. ф-лы, 4 ил
1. Измерительное устройство (9) для определения абсолютного угла (φ) поворота вращающегося измеряемого объекта, причем на валу (8) измеряемого объекта расположено первое зубчатое колесо (Z1), которое непосредственно или косвенно находится в зацеплении с по меньшей мере одним вторым зубчатым колесом (Z2) и одним третьим зубчатым колесом (Z3) и количества (z1, z2, z3) зубьев отдельных зубчатых колес (Z1, Z2, Z3) различаются между собой, причем каждое зубчатое колесо (Z1, Z2, Z3) снабжено сельсин-датчиком (D1, D2, D3), который распознает угол (φz1, φz2, φz3) соответствующего зубчатого колеса (Z1, Z2, Z3), причем предусмотрен решающий блок, который определяет, по меньшей мере, разность (φz1-φz2) угла поворота второго зубчатого колеса (Z2) относительно первого зубчатого колеса (Z1) и разность (φz1-φz3) угла поворота третьего зубчатого колеса (Z3) относительно первого зубчатого колеса (Z1) и на основании подсчета итога (SumDiff=(φz1-φz2)+(φz1-φz3)) разностей (φz1-φz2, φz1-φz3) определенных углов (φz1, φz2, φz3) поворота зубчатых колес (Z1, Z2, Z3) определяет число целочисленных оборотов и остаточный угол (φz1) поворота вала (8) измеряемого объекта.
2. Измерительное устройство по п.1, в котором для определения угла (φz1, φz2, φz3) поворота отдельных зубчатых колес (Z1, Z2, Z3) применяют оптические, магнитные и/или электромеханические сельсин-датчики (D1, D2, D3).
3. Измерительное устройство по п.1 или 2, в котором количество (z1, z2, z3) зубьев зубчатых колес (Z1, Z2, Z3) различается предпочтительно на один зуб (dZ=1), так что разница (dZ) количества (z1-z2 или z1-z3) зубьев соответственно равна единице.
4. Измерительное устройство по п.1, в котором решающий блок (13) определяет многооборотное разрешение (TurnRes) для определения абсолютного угла поворота с использованием частичного разрешения (ТА) следующим образом:
TurnRes=n·TA
с TurnRes, n ∈ Q, TA ∈ Q и TuirnRes≥TA, причем TurnRes представляет собой многооборотное разрешение при минимально возможном n.
5. Измерительное устройство по п.4, в котором датчик (D1) углового положения зубчатого колеса (Z1, Z2, Z3), которое придано валу (8) измеряемого объекта, непосредственно распознает остаточный угол (φz1) поворота или решающий блок (13) определяет остаточный угол (φz1) поворота на основании разрядов после запятой при расчете целочисленных оборотов (с большим числом оборотов), причем предпочтительно используется следующее уравнение:

причем zHA≤n и причем SumDiff воспроизводит сумму разностей углов φz1, φz2, φz3 поворота отдельных зубчатых колес Z1, Z2, Z3
SumDiff=2·φZ1-φZ2-φZ3.
6. Измерительное устройство по п.4 или 5, в котором решающий блок (13) посредством формирования разности определенных углов (φz1, φz2, φz3) второго зубчатого колеса (Z2) и третьего зубчатого колеса (Z3) подразделяет угловое разрешение (TurnRes) измерительного устройства (9) на вспомогательные сегменты (UA), причем количество вспомогательных сегментов (UA) зависит от количества (z1) зубьев первого зубчатого колеса (Z1), и геометрический шаг вспомогательных сегментов (UAi с i=1,…n) больше геометрического шага главных сегментов (HA).
7. Измерительное устройство по п.4 или 5, в котором решающий блок (13) посредством формирования разности (φz1-φz2, φz1-φz3) определенных углов поворота первого зубчатого колеса (Z1) и второго зубчатого колеса (Z2) или первого зубчатого колеса (Z1) и третьего зубчатого колеса (Z3) подразделяет угловое разрешение (TurnRes) измерительного устройства (1) на вспомогательные сегменты (UA), причем геометрический шаг вспомогательных сегментов (UA) больше геометрического шага главных сегментов (HA).
8. Измерительное устройство по п.1 или 5, в котором решающий блок (13) на основании разницы (dZ) количества зубьев первого зубчатого колеса (Z1) по отношению ко второму зубчатому колесу (Z2) и первого зубчатого колеса (Z1) по отношению к третьему зубчатому колесу (Z3), причем разница равна dZ, причем dZ больше единицы или равно единице, подразделяет общее угловое разрешение измерительного устройства (9) на n главных сегментов (HA) и причем решающий блок (13) определяет соответствующий главный сегмент (HAn) на основании соответствующей позиции (φz1, φz2, φz3) зубчатых колес (Z1, Z2, Z3).
9. Измерительное устройство по п.1, в котором в случае измеряемого объекта речь идет о приводном вале (8) и/или вале (7) отбора мощности сервопривода (4) для приведения в действие арматуры (2), причем приводной вал (8) соединен с исполнительным элементом (3; 6) и между исполнительным элементом (3; 6) и арматурой предусмотрена понижающая передача (5).
10. Измерительное устройство по п.9, в котором исполнительный элемент выполнен в виде электродвигателя (3) или маховичка (6).
11. Измерительное устройство по п.1, в котором зубчатые колеса (Z1, Z2, Z3) выполнены в виде цилиндрических зубчатых колес, и/или зубчатых колес с внутренним зацеплением, и/или в виде цепных зубчатых колес, и/или в виде фрикционных колес.
| US 5930905 03.08.1999 | |||
| US 6941241 B2 06.09.2005 | |||
| Электрическая нагревательная печь для припайки флажков к коллекторам | 1951 |
|
SU95824A1 |
| US 6687647 B2 03.02.2004 | |||
| US 7791333 B2 07.09.2010 | |||

