Изобретение относится к области гидроакустики и может быть использовано для построения систем обнаружения локальных объектов в условиях распределенных помех различного происхождения.
Под локальным объектом здесь понимается подводный или надводный объект искусственного происхождения ограниченного размера (корабль, подводный аппарат, буй, контейнер и т.п.), при этом объем объекта существенно меньше объема лоцируемого пространства, ограниченного телесным углом характеристики направленности приемо-излучающей антенны гидролокатора и отрезком дистанции, определяемым временем излучения зондирующего сигнала (ЗС).
Под распределенными помехами подразумеваются помехи, обусловленные реверберационными отражениями излучаемых сигналов от дна или поверхности моря, а также от звукорассеивающих слоев водной массы. Это может быть также береговая черта или подводная скала (гряда камнеобразований).
В зависимости от ракурса объекта по отношению к направлению излучения реальные объекты, как правило, имеют многобликовую структуру отраженного сигнала [1,2].
Амплитуды бликов для некоторых ракурсов объекта могут синфазно суммироваться, в этом случае эхосигнал от объекта может достигать максимального значения, соответствующего энергетической сумме бликовых отражений объекта, что, однако, является маловероятным событием, так как при многолучевом распространении звука в среде кроме суммирования бликов на входе приемной антенны будут суммироваться лучи от каждого блика, имеющие неопределенную фазу.
Как показывают расчеты, для тональных ЗС при определенных значениях радиальной скорости локального объекта, его ракурса и бликовой структуры эхосигнал может быть полностью подавлен вследствие интерференции. Кроме того, для разрешения бликов с использованием тональных сигналов акустическая протяженность импульсов должна быть как минимум в два раза меньше расстояния между бликами. Малая длительность излучаемых импульсов в свою очередь снижает энергетический потенциал гидролокатора.
При отражении эхосигналов от нелокальных протяженных объектов также может иметь место бликовая структура эхосигнала. Однако угловое пространственное распределение бликов носит, как правило, случайный характер. Применение широкополосных ЗС при использовании известных методов согласованной обработки и соответствующем разрешении по дистанции позволяет определить амплитуды отдельных бликов объекта.
Известны способы обнаружения локальных объектов [3], основанные на излучении и согласованной с излученным сигналом обработке путем свертки спектров излученного и принятого сигналов, определении максимальной амплитуды бликов эхосигнала и сравнении полученного отношения сигнал/помеха с заданным порогом обнаружения, связанным с вероятностью правильного обнаружения и вероятностью ложных тревог.
Однако максимальная амплитуда одного из бликов объекта в большинстве случаев при высокой интенсивности реверберационных помех и традиционных методах энергетического приема может не позволить решить задачу обнаружения локального объекта с заданной вероятностью правильного обнаружения.
Для режима моностатической гидролокации известен способ обнаружения локального объекта на фоне распределенной помехи на основе корреляционной обработки эхосигналов в соседних пространственных каналах веера статических характеристик направленности приемного тракта гидролокатора [4].
Сущность способа [4] заключается в том, что характеристики эхосигнала от локального отражателя по своим корреляционным характеристикам в соседних пространственных каналах будут достаточно близкими.
В то же время корреляционные характеристики реверберации или протяженного объекта в соседних характеристиках направленности, в силу природы случайно распределенных в пространстве источников помех, имеют малую степень связи.
По количеству общих признаков и по технической сущности способ [4] является наиболее близким аналогом предлагаемого способа при реализации моностатической гидролокации и выбран в качестве прототипа.
Способ-прототип [4] предусматривает использование классических методов приема и пороговой обработки эхосигналов гидролокаторов, при этом корреляционная обработка временных реализаций соседних пространственных каналов позволяет идентифицировать обнаруженные сигналы как отражения от локальных или нелокальных объектов, по числу соседних приемных каналов, между которыми коэффициенты корреляции превышают значение 0,5.
Особенностью указанного способа [4] является то, что первоначально производится определение превышения эхосигналом уровня заданного порога, а затем определяют коэффициент корреляции между временными наборами соседних приемных каналов, в которых произошло превышение порога обнаружения.
В данном случае при заданном пороге обнаружения в условиях интенсивных реверберационных помех, при отношениях сигнал/помеха близких к порогу, велика вероятность пропуска эхосигналов в соседних пространственных каналах, корреляционная связь которых позволила бы принять решение о наличии объекта обнаружения.
Таким образом, недостатком способа-прототипа [4] является недостаточная помехоустойчивость в условиях интенсивных реверберационных помех и низком уровне эхосигнала при многобликовой структуре объекта.
Для достижения указанного технического результата в способ обнаружения локального объекта, который содержит излучение сложного зондирующего сигнала, прием эхосигнала многоканальным приемным трактом, пространственные приемные каналы которого образуют веер статических характеристик направленности, пересекающихся на уровне не меньшем, чем 0.7 от максимума, набор временных реализаций в каждом приемном канале, имеющих одинаковое время прихода сигнала, определение корреляционной связи между соседними приемными каналами,
введены новые признаки, заключающиеся в том, что предварительно в каждой временной реализации каждого приемного канала производят вычисление спектра принятого сигнала, определяют в каждом приемном канале модуль взаимно-ковариационной функции принятого и излученного сигналов путем обратного преобразования Фурье свертки спектра эхосигнала с комплексно-сопряженным спектром излученного сигнала, а корреляционную связь огибающих временных реализаций соседних приемных каналов определяют путем нахождения максимума модуля взаимно-ковариационной функции между огибающими принятых эхосигналов для каждой пары соседних приемных каналов, определяют среднее значение по всем максимумам, нормируют все максимумы взаимно-ковариационных функций на среднее значение, а решение о наличии локального объекта принимают в случае превышения нормированных максимумов взаимно-ковариационных функций уровня выбранного порога не более чем в N приемных каналах, иначе принимают решение об обнаружении нелокального объекта.
Значение N определяют предварительно расчетно-экспериментальным путем в зависимости от уровня пересечения характеристик направленности соседних приемных каналов приемного тракта и уровня заданного порога обнаружения.
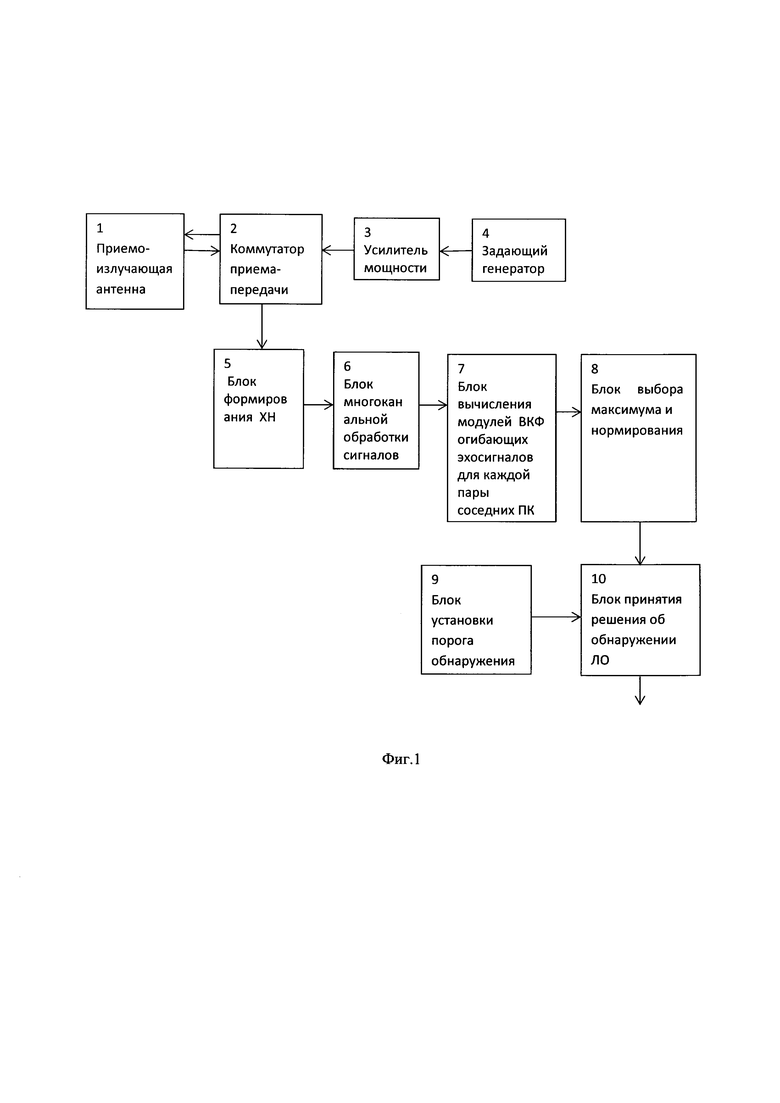
Сущность изобретения поясняется фиг 1-3, где на фиг. 1 приведена блок-схема устройства, реализующего предлагаемый способ обнаружения, на фиг. 2 приведен результат моделирования эхосигнала (а) и взаимно-ковариационных функций (ВКФ) между огибающими принятых эхосигналов (б) для соседних приемных каналов однобликового объекта, на фиг. 3 - результат моделирования эхосигнала (а) и ВКФ между огибающими (б) принятых эхосигналов для соседних приемных каналов многобликового объекта.
Устройство (фиг. 1) содержит приемо-излучающую антенну 1, коммутатор приема-передачи 2, усилитель мощности 3, задающий генератор 4, блок 5 формирования характеристик направленности, блок 6 многоканальной обработки сигналов, блок 7 вычисления модулей взаимно-ковариационных функций между огибающими принятых эхосигналов для каждой пары соседних пространственных каналов, блок 8 выбора максимума и нормирования, блок 9 установки порога обнаружения, блок 10 принятия решения об обнаружении локального объекта.
Вход антенны 1 соединен через коммутатор приема-передачи 2 и усилитель мощности 3 с выходом задающего генератора 4. Выход коммутатора приема-передачи 2 соединен с входом блока 5 формирования характеристик направленности, выход которого соединен с входом блока 6 многоканальной обработки сигналов. Выход блока 6 многоканальной обработки сигналов через последовательно соединенные блок 7 вычисления модулей взаимно-ковариационных функций между огибающими принятых эхосигналов для каждой пары соседних пространственных каналов и блок 8 выбора максимума и нормирования подключен к первому входу блока 10 принятия решения об обнаружении локального объекта, второй вход которого подключен к выходу блока 9 установки порога обнаружения.
Связи, синхронизирующие работу излучающего и приемного трактов устройства, на фиг. 3 не показаны в целях упрощения.
Реализация блоков вышеприведенного устройства может быть выполнена аналогично устройствам, описанным в известной литературе [5-7].
Реализацию предложенного способа целесообразно рассмотреть на примере работы приведенного на фиг. 1 устройства.
Сформированный в задающем генераторе 4 зондирующий сигнал через усилитель мощности 3 поступает на коммутатор приема-передачи 2, далее передается на антенну 1 и излучается в водную среду. Эхосигналы, принимаемые антенной 1, через коммутатор приема-передачи 2 поступают на вход блока 5 формирования характеристик направленности.
В блоке 5 производится набор временных реализаций в каждом приемном канале, имеющих одинаковое время прихода эхосигнала.
Современные методы цифрового формирования характеристик направленности на основе двойного преобразования Фурье обеспечивают формирование спектров сигналов на выходе пространственных приемных каналов. При этом в зависимости от числа приемников антенны 1, используемых для формирования одной ХН, направления осей ХН пространственных каналов с помощью выбора соответствующих амплитудно-фазовых коэффициентов могут быть сформированы ХН с уровнем пересечения в соседних каналах 0,7 или выше.
Спектры эхосигналов, сформированных в приемных каналах, с выхода блока 5 поступают на вход блока 6 многоканальной обработки сигналов.
В блоке 6 производится вычисление комплексно-сопряженного спектра зондирующего сигнала, комплексное перемножение его со спектрами сигналов приемных каналов с последующим обратным преобразованием Фурье и вычислением модулей взаимно-ковариационных функций принятого и излученного сигналов. Таким образом, на выходе блока 6 получают набор временных реализаций огибающих эхосигналов в каждом m-ном приемном канале (m=1…М), имеющих одинаковое время прихода сигнала.
С выхода блока 6 многоканальной обработки значения модулей взаимно-ковариационных функций в каждом приемном канале поступают на вход блока 7, в котором производится вычисление спектров временных реализаций огибающих эхосигналов в каждом приемном канале, перемножение комплексно-сопряженных спектров огибающих в соседних пространственных каналах с последующим обратным преобразованием Фурье и вычислением (М-1) наборов модулей взаимно-ковариационных функций между огибающими принятых эхосигналов для каждой пары соседних пространственных каналов.
С выхода блока 7 модули взаимно-ковариационных функций между огибающими принятых эхосигналов для каждой пары соседних пространственных каналов поступают на вход блока 8, где производится выбор максимального значения в каждом из (М-1) наборов модулей взаимно-ковариационных функций, определение среднего значения по всем (М-1) максимумам и нормирование всех максимумов взаимно-ковариационных функций на их среднее значение.
С выхода блока 8 нормированные максимальные значения модулей взаимно-ковариационных функций между огибающими принятых эхосигналов для каждой пары соседних пространственных каналов поступают на вход блока 10, где производится сравнение каждого значения с заданным порогом обнаружения, поступающим из блока 9, и в случае превышения принимается решение об обнаружении эхосигнала.
В случае превышения нормированных максимумов взаимно-ковариационных функций уровня заданного порога не более чем в N приемных каналах, принимают решение о наличии локального объекта. Если число нормированных максимумов взаимно-ковариационных функций, превышающих уровень заданного порога, больше значения N, принимают решение об обнаружении нелокального объекта.
Технический результат от использования предлагаемого способа подтверждается моделированием работы приведенного на фиг. 1 устройства.
На фиг. 2 приведен результат моделирования эхосигнала однобликового объекта в приемном канале (фиг. 2а) и ВКФ огибающих эхосигналов (фиг. 2б) того же объекта в соседних приемных каналах, уровни характеристик направленности которых пересекаются на уровне 0,8. Как видно из фиг. 2а, при выборе уровня порога Uпор=7 максимум эхосигнала и максимум ВКФ огибающих (фиг. 2б) превышают значение порога. Таким образом для однобликового объекта высокий уровень эхосигнала позволяет обнаруживать эхосигнал как в предлагаемом способе обнаружения, так и в способе-прототипе.
На фиг. 3 приведен результат моделирования для тех же условий эхосигнала шестибликового объекта (а), а также вычисления ВКФ огибающих эхосигналов (б) того же объекта в соседних приемных каналах. Как видно из фиг. 3а, уровень бликов эхосигнала уменьшается и при том же уровне порога Uпор=7 амплитуда максимального блика эхосигнала уже не превышает порог и в способе-прототипе этот эхосигнал не будет обнаружен. В то же время максимум ВКФ огибающих эхосигналов (фиг. 3б) в соседних приемных каналах превышает значение порога Uпор=7 и решение об обнаружении локального объекта в предлагаемом способе может быть принято, что подтверждает достижение заявленного технического результата.
Источники информации
1. А.А. Илларионов, С.В. Козловский, В.П. Чернов. Экспериментальная оценка бистатической силы цели при различных видах зондирующих сигналов // Известия ЮФУ. Технические науки. Тематич. вып. «Экология 2013 - море и человек», Технологический институт Южного Федерального Университета г. Таганрог, вып. 9 (146), 2013. - С. 160-165.
2. В.С. Давыдов. Физико-математические основы многоальтернативного распознавания и идентификации гидролокационных полей тел сложной геометрической формы // Успехи физических наук. Том 178, №11, ноябрь 2008 г.
3. «Применение цифровой обработки сигналов» под ред. Э. Оппенгейма, М., Мир, 1980, с. 428.
4. Патент RU 2 460 088 С1 от 08.04.2011 г., МПК G01S 13/04 G01S 15/04 (2006.1), опубликовано 27.08.2012 г., бюл. №24.
5. А.В. Рыжиков, Ю.В. Барсуков. Системы и средства обработки сигналов в гидроакустике. Учеб. пособие. СПб.: Изд-во СПбГЭТУ «ЛЭТИ», 2007 г.
6. Л.В. Орлов. А.А. Шабров. Гидроакустическая аппаратура рыбопромыслового флота // Л., Судостроение, 1982 г.
7. В.С. Бурдик. Анализ гидроакустических систем // Л., Судостроение, 1988 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обнаружения локального объекта на фоне распределенной помехи при бистатической гидролокации | 2019 |
|
RU2736567C1 |
| Способ обнаружения локального объекта на фоне распределенной помехи | 2021 |
|
RU2772110C1 |
| Гидролокационный способ классификации с использованием псевдошумового сигнала | 2020 |
|
RU2735929C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ЛОКАЛЬНОГО ОБЪЕКТА НА ФОНЕ РАСПРЕДЕЛЕННОЙ ПОМЕХИ | 2011 |
|
RU2460088C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ЛОКАЛЬНОГО ОБЪЕКТА НА ФОНЕ РАСПРЕДЕЛЕННОЙ ПОМЕХИ | 2016 |
|
RU2634787C1 |
| Гидролокационный способ обнаружения объекта и измерения его параметров | 2018 |
|
RU2697937C1 |
| Гидролокационный способ классификации объектов | 2022 |
|
RU2791152C1 |
| Способ обработки псевдошумового сигнала в гидролокации | 2020 |
|
RU2739478C1 |
| Способ определения параметров цели гидролокатором | 2017 |
|
RU2650835C1 |
| СПОСОБ КЛАССИФИКАЦИИ ОБЪЕКТА, ОБНАРУЖЕННОГО ГИДРОЛОКАТОРОМ | 2012 |
|
RU2490664C1 |

Изобретение относится к области гидроакустики и может быть использовано для построения систем обнаружения локального объекта в условиях распределенных помех различного происхождения. Техническим результатом является повышение помехоустойчивости обнаружения локальных объектов в условиях интенсивных реверберационных помех и низком уровне эхосигнала при многобликовой структуре объекта. Способ обнаружения локального объекта содержит излучение сложного зондирующего сигнала, прием эхосигнала многоканальным приемным трактом, пространственные приемные каналы которого образуют веер статических характеристик направленности, пересекающихся на уровне, не меньшем чем 0.7 от максимума, набор временных реализаций в каждом приемном канале, имеющих одинаковое время прихода сигнала, определение корреляционной связи между соседними приемными каналами. В каждой временной реализации каждого приемного канала производят вычисление спектра принятого сигнала, определяют в каждом приемном канале модуль взаимно-ковариационной функции принятого и излученного сигналов путем обратного преобразования Фурье свертки спектра эхосигнала с комплексно-сопряженным спектром излученного сигнала. Определяют корреляционную связь огибающих временных реализаций соседних приемных каналов путем нахождения максимума модуля взаимно-ковариационной функции между огибающими отражений лоцируемых объемов пространства в соседних приемных каналах. Далее определяют среднее значение по всем максимумам, нормируют все максимумы взаимно-ковариационных функций на среднее значение. Решение о наличии локального объекта принимают в случае превышения нормированных максимумов взаимно-ковариационных функций уровня выбранного порога не более чем в N приемных каналах, иначе принимают решение об обнаружении нелокального объекта. 1 з.п. ф-лы, 3 ил.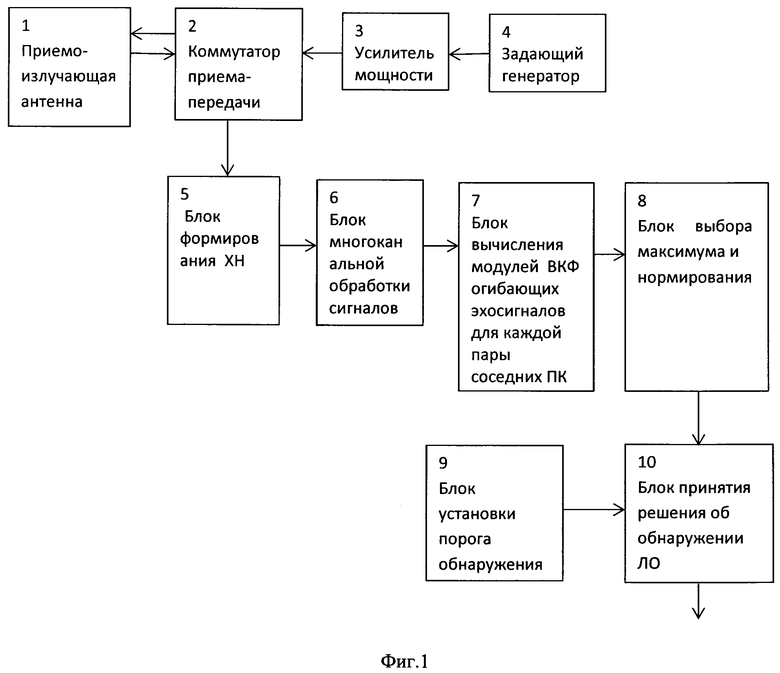
1. Способ обнаружения локального объекта на фоне распределенной помехи, содержащий излучение сложного зондирующего сигнала, прием эхосигнала многоканальным приемным трактом, пространственные приемные каналы которого образуют веер статических характеристик направленности, пересекающихся на уровне, не меньшем чем 0.7 от максимума, набор временных реализаций в каждом приемном канале, имеющих одинаковое время прихода сигнала, определение корреляционной связи между соседними приемными каналами, отличающийся тем, что предварительно в каждой временной реализации каждого приемного канала производят вычисление спектра принятого сигнала, определяют в каждом приемном канале модуль взаимно-ковариационной функции принятого и излученного сигналов путем обратного преобразования Фурье свертки спектра эхосигнала с комплексно-сопряженным спектром излученного сигнала, а корреляционную связь огибающих временных реализаций соседних приемных каналов определяют путем нахождения максимума модуля взаимно-ковариационной функции между огибающими принятых эхосигналов для каждой пары соседних приемных каналов, определяют среднее значение по всем максимумам, нормируют все максимумы взаимно-ковариационных функций на их среднее значение, а решение о наличии локального объекта принимают в случае превышения нормированных максимумов взаимно-ковариационных функций уровня заданного порога не более чем в N приемных каналах, иначе принимают решение об обнаружении нелокального объекта.
2. Способ по п. 1, отличающийся тем, что значение N определяют расчетно-экспериментальным путем в зависимости от уровня пересечения характеристик направленности соседних приемных каналов и уровня заданного порога обнаружения.
| СПОСОБ ОБНАРУЖЕНИЯ ЛОКАЛЬНОГО ОБЪЕКТА НА ФОНЕ РАСПРЕДЕЛЕННОЙ ПОМЕХИ | 2016 |
|
RU2634787C1 |
| Способ разрешения тональных гидроакустических сигналов | 2018 |
|
RU2677835C1 |
| СПОСОБ РАСПОЗНАВАНИЯ ЦЕЛЕЙ ОТ СЛУЧАЙНЫХ РЕВЕРБЕРАЦИОННЫХ ПОМЕХ | 2008 |
|
RU2366973C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ЛОКАЛЬНОГО ОБЪЕКТА НА ФОНЕ РАСПРЕДЕЛЕННОЙ ПОМЕХИ | 2011 |
|
RU2460088C1 |
| Гидролокационный способ обнаружения объекта и измерения его параметров | 2018 |
|
RU2697937C1 |
| СПОСОБ ОБЗОРА ПРОСТРАНСТВА ГИДРОАКУСТИЧЕСКОЙ СИСТЕМОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2047278C1 |
| CN 103033815 A, 10.04.2013 | |||
| JPH 11142506 A, 28.05.1999 | |||
| US 2006050613 A1, 09.03.2006 | |||
| CN 109061599 A, 21.12.2018. | |||

