Изобретение относится к области гидроакустики и может быть использовано для построения систем автоматического обнаружения эхосигналов, принятых гидролокатором на фоне шумовой и реверберационной помехи, измерения параметров объекта и его классификации при использовании псевдошумовых сигналов.
Известны способы обнаружения эхосигнала, основанные на определении энергетического спектра электрического процесса, представляющего собой смесь электрического сигнала и нормальной стационарной шумовой помехи, изложенные, например, в работе Евтютов Е.С. и Митько В.Б. "Примеры инженерных расчетов в гидроакустике", Судостроение 1981 г, стр. 77. Способ содержит спектральный анализ этого процесса, детектирование спектральных составляющих, интегрирование огибающей и обнаружение эхосигнала при сравнении с порогом. Аналогичный способ обнаружения эхосигнала изложен в книге B.C. Бурдик "Анализ гидроакустических систем". Судостроение 1988 г. стр. 347 и содержит многоканальную по частоте фильтрацию, детектирование, выделение огибающей и сравнение с порогом.
Недостатком этих способов является то, что они используют тональный сигнал большой длительности и на выходе системы обработки определяется спектр эхосигнала, по которому можно определить скорость сближения, но нельзя определить длительность эхосигнала и его структуру. Это объясняется тем, что длительность зондирующего тонального сигнала сравнима с протяженностью объекта, поэтому отражающие точки, которые характеризуют объект и являются одним из основных классификационных признаков, при использовании тональных сигналов дальней гидролокации определить нельзя. Для задач ближней гидролокации используются короткие зондирующие сигналы, но они обеспечивают малую дальность обнаружения.
Известны способы обнаружения и измерения параметров эхосигналов от объектов с использованием, так называемых, псевдошумовых сигналов (ПШС), при обработке которых на выходе формируется корреляционная функция эхосигнала и излученного зондирующего сигнала. При этом ширина корреляционной функции определяется не длительностью сигнала, а шириной полосы излученного зондирующего сигнала. Эти способы нашли применение в радиолокации и в дальней гидролокации (Р. Бенжамин «Анализ радио и гидролокационных сигналов» Воениздат М. 1969). Основные свойства этих сигналов определяются видом внутренней модуляции, которая определяет вид функции неопределенности, частным случаем которой является функция корреляции. Для задач классификации в гидролокации наибольший интерес представляют псевдошумовые сигналы, которые имеют кнопочную функцию неопределенности, которая обеспечивает хорошее разрешение по времени и по скорости. (В.А. Зарайский, A.M. Тюрин Теория гидролокации изд. ВМАОЛУ, Л. 1975 стр. 242). Как правило, обработка таких сигналов производится с использованием многоканальных корреляторов (там же стр. 255) или многоканальных согласованных фильтров (там же на стр. 333). Если гидролокатор неподвижен и объект локации неподвижен, то излученный сигнал и принятый эхосигнал совпадают, и обеспечивается оптимальное определение взаимно корреляционной функции. Однако такая ситуации практически никогда не встречается, и за счет собственного движения и движения цели происходит смещение спектра отраженного сигнала в соответствии с эффектом Доплера (там же стр. 200), в результате чего спектры не совпадают, и не образуется свернутая корреляционная функция. Именно по этому, используется при приеме многоканальная обработка, где каждый канал соответствует определенной скорости цели. Обработка сигнала в каждом канале производится на частоте, смещенной по отношению к частоте излученного сигнала в соответствии с определенной скоростью цели.
Известен способ обработки сложного сигнала, приведенный в книге В.А. Зарайский, A.M. Тюрин «Теория гидролокации» изд. ВМАОЛУ, Л. 1975 стр. 255.
Способ обработки псевдошумового сигнала содержит следующие операции: излучение зондирующего псевдошумового сигнала, формирования М-опорных сигналов, центральная частота которых сдвинута по частоте относительно излученного сигнала на величину К, прием эхосигнала, определение М корреляционных функций между эхосигналом и каждым из М-опорных сигналов, измерение амплитуды корреляционных функций, выбор корреляционной функции с максимальной амплитудой, определение временного положения максимума корреляционной функции для определения дистанции, определение номера опорного сигнала для определения скорости, отображение результата на индикаторе.
Наиболее близким к предлагаемому способу по количеству общих признаков является гидролокационный способ обнаружения объекта и измерения его параметров по патенту РФ №2674552 от 07.12 2017.
Способ содержит излучение зондирующего псевдошумового сигнала длительностью Т и полосой F в момент tиз, формирования М опорных сигналов, центральная частота которых сдвинута по частоте относительно излученного сигнала на величину К, прием эхосигнала, определение М корреляционных функций между эхосигналом и каждым из М-опорных сигналов, измерение амплитуды корреляционных функций, выбор корреляционной функции с максимальной амплитудой Амакс, определение временного положения максимума корреляционной функции tмакс для определения дистанции по формуле Д=0,5C(tмакс-tиз), где С- скорость звука, определение номера опорного сигнала Mtмакс для определения скорости Vtмакс, отображение результата на индикаторе, при этом величина сдвига по частоте К не превышает 0,5/Т. В соответствии с этим способом определяют крайний номер опорного канала симметричного Mtмакс относительно частоты излучения и в этом канале определяют максимальное значение выброса корреляционной функции Апор, и, если Амакс>2Апор, то определяют амплитуды всех выбросов корреляционной функции канала с Амакс, величина которых превысила 0,5Амакс, определяют временное положение каждого выброса ti, определяют разность между крайними выбросами и протяженность эхосигнала L=0,5C(t1-tn), где t1 первый выброс корреляционной функции, превысивший порог, tn последний выброс корреляционной функции, превысивший порог, определяют число выбросов превысивших порог N и определяют класс цели по скорости, протяженности и числу выбросов.
Недостатком способа - прототипа и других способов обработки, использующих опорный сигнал, является то, что для получения потенциальных параметров цели с помощью псевдошумового сигнала, необходима взаимно корреляционная обработка принятого сигнала с опорным сигналом, который должен являться точной копией принятого сигнала. Для этой цели используется банк опорных сигналов, каждый их которых сдвинут друг относительно друга на величину равную половина интервала корреляции по частоте. При этом необходимо произвести взаимно корреляционную обработку входной набранной временной реализации со всеми опорными сигналами, имеющимися в банке копий, что требует большого числа времени для получения конечного результата.
Известно, что взаимно-корреляционная функция между принятым сигналом и опорным сигналом достигает максимального значения в том случае, когда опорный сигнал полностью совпадает с принятым сигналам по частоте. Такая ситуация может быть только при проведении моделирования, в реальных условиях это исключено по ряду причин. Во-первых, при распространении сигнала в реальных условиях имеет место многолучевое распространение в сторону цели и в обратном направлении, поэтому вместо одного сигнала может быть несколько сигналов, что приводит к отличию принятого сигнала от опорного сигнала. Реальные цели могут представлять собой несколько отражателей, что приводит так же к отличию отраженного сигнала от опорного. Кроме того, реальные объекты перемещаются, и сам гидролокатор перемещается за счет собственного движения, что приводит к смещению спектра отраженного сигнала от частоты опорного сигнала. В ряде случаев наблюдается отсутствие максимумов взаимно-корреляционной функции на выходе системы обработки при большом отношении сигнал/помеха на входе, что говорит об отличии закона модуляции опорного сигнала и принятого эхосигнала, произошедшее из-за разрушения спектральной структуры эхосигнала при его распространении. Поэтому при обработке псевдошумового сигнала в реальных условиях трудно добиться оптимальной обработки эхосигнала от много бликовой цели в условиях многолучевости с имеющимися опорными сигналами.
Задачей изобретения является повышение эффективности обработки эхосигнала и классификации обнаруженного объекта при использовании взаимно-корреляционной обработке псевдошумового сигнала.
Техническим результатом заявленного изобретения является сокращение времени обработки и повышение эффективности полученного результата обработки псевдошумового сигнала.
Для достижения указанного технического результата в гидролокационный способ классификации с использованием пседошумового сигнала, содержащий излучение псевдошумового зондирующего сигнала, прием эхосигнала от цели, проведение взаимно-корреляционной обработки, определение временного положения максимумов взаимно - корреляционной функции, определение дистанции, определение протяженности цели, определения числа выбросов взаимно - корреляционной функции, превысивших порог и определение класса цели введены новые признаки, а именно прием сигнала осуществляют статическим веером характеристик направленности, пересекающихся на уровне не менее 0,7 от максимума, набор временных реализаций эхосигнала производят одновременно по всем характеристикам направленности, производят взаимно-корреляционную обработку между соседними пространственными каналами, по первым временным реализациям первых наборов двух соседних пространственных каналов, с которых начинается обработка, находят среднее значение амплитуд полученных взаимно-корреляционных функций, выбирают порог равный двум его значениям, определяют максимум выбросов взаимно-корреляционных функций, превысивших порог, определяют номера пространственных каналов, которые участвуют в формировании максимума, определяют временное положение выбросов взаимно корреляционной функции в пространственных каналах соседних с пространственными каналами, которые участвуют в формировании этого максимума, и, если временные положения их совпадают, то принимают решение о наличии в них эхосигнала от цели, по временному положению максимума определяют дистанцию до цели, а по номерам пространственных каналов, которые участвуют в формировании максимума, определяют курсовой угол цели, по числу всех выбранных соседних пространственных каналов, в которых временное положение выбросов взаимно корреляционных функций совпадают, определяют угловую протяженность цели, при этом радиальную протяженность цели определяют по разности времен между первым и последним временным положением этих выбросов, при чем число отражателей цели определяют по числу выбросов, превысивших порог в максимальной взаимно корреляционной функции, что позволяет классифицировать цель по числу отражателей.
Поясним сущность предлагаемого технического решения.
Известно, что при распространении фронта волны отраженного эхосигнала на больших дистанциях прием одновременно осуществляется несколькими характеристиками направленности (ХН), которые пересекаются на уровне 0,7 от максимума. Поэтому во временных наборах соседних характеристик направленности будут присутствовать одни и те же временные реализации, но только с разными амплитудами. Уменьшение амплитуды эхосигнала в соседних характеристиках направленности на 10-30% незначительно скажется на формировании взаимно корреляционной функции. При обработке эхосигнала прототипа различие по амплитуде между опорным и принятым эхосигналом достигает значительной величины из-за распространения зондирующего сигнала, уменьшении эхосигнала при отражении и распространении эхосигнала к приемному устройству. Поэтому предлагается в качестве опорного сигнала выбрать сигнал принятый соседней пространственной характеристикой направленности, который имеет ту же частоту и ту же структуру, что и сигнал в характеристике с наибольшей амплитудой сигнала, но амплитудой меньше. При этом исчезает необходимость многоканальной по частоте обработки с определением опорной частоты. Порог выбирается при обработке по всем соседним пространственным каналам первой временной реализации при начале обработки входной информации. В первой временной реализации отсутствуют эхосигналы, поэтому можно обеспечить определение порога для дальнейшей обработки.
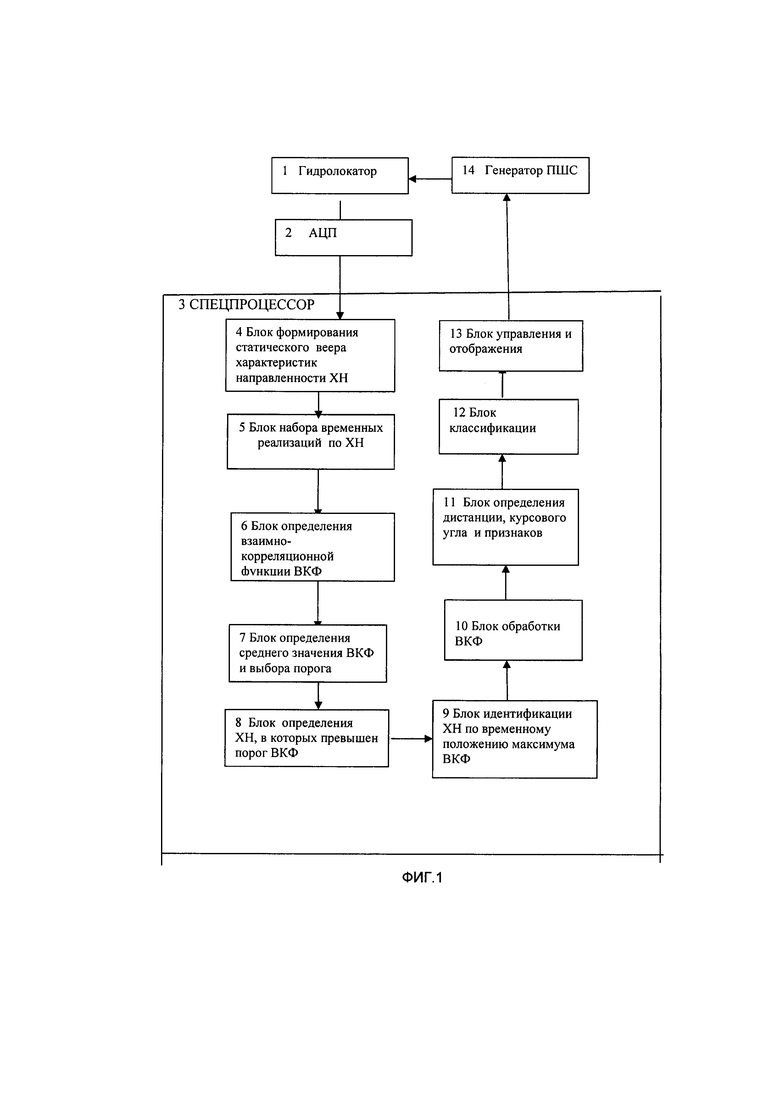
Сущность изобретения поясняется фиг. 1, на которой представлена блок-схема корреляционного гидролокатора.
Гидролокатор 1 (фиг. 1) через аналого-цифровой преобразователь (АЦП) 2 соединен со спецпроцессором 3, в состав которого входят последовательно соединенные блок 4 формирования статического веера характеристик направленности (ФСХН), блок 5 набора временных реализаций по всем характеристикам направленности, блок 6 определения взаимно-корреляционных функций (ВКФ), блок 7 определения среднего значения ВКФ и выбор порога, блок 8 определения ХН, в которых превышен порог, блок 9 идентификации ХН по временному положению, блок 10 обработки максимумов взаимно корреляционной функции, блок 11 определения дистанции, курсового угла и протяженности, блок 12 классификации, блок 13 управления и отображения, генератор 14 псевдошумового сигнала.
Гидролокатор 1 является известным устройством, который достаточно подробно описан в технической литературе (А. Корякин, С.А. Смирнов, Г.В. Яковлев «Корабельная гидроакустическая техника» Санкт-Петербург «Наука» 2004 г. стр. 152, 340), и так же используется в прототипе. Для качественного решения задач обработки гидроакустической информации в современных корабельных гидроакустических средствах (станциях) используются спецпроцессоры на основе ЦВС, обладающие высокой производительностью, функциональной надежностью и малыми габаритами. С использованием специального алгоритмического и программного обеспечения спецпроцессорами могут решаться все задачи формирования и обработки принимаемых гидроакустических сигналов, в том числе для измерения параметров эхосигнала по всем пространственным каналам, взаимно-корреляционная обработка и решения задач отображения и управления процессом излучения и приема эхосигналов. (Ю.А. Корякин, С.А. Смирнов, Г.В. Яковлев «Корабельная гидроакустическая техника» Санкт-Петербург «Наука» 2004 г. стр. 281). Практически все используемые процедуры обработки цифровой входной информации могут быть реализованы на современных компьютерах и ноутбуках, в которых реализованы вычислительные программы Матлаб, Матсард и др. (А.Б. Сергиенко Цифровая обработка сигналов СПб. «БХВ - Петербург» 2011 г.). А. Оппенгейм, Р. Шафер «Цифровая обработка сигналов» Техносфера М. 2012 г.
Реализацию предлагаемого способа целесообразно рассмотреть на примере работы устройства (фиг. 1).
С блока 13 управления и отображения зондирующий псевдошумовой сигнал и команда на его излучение поступает в гидролокатор 1, который производит излучение зондирующего сигнала, после чего гидролокатор переходит в режим приема отраженных эхосигналов. Принятые гидролокатором 1 в рабочей полосе временные реализации входного процесса в аналоговом виде поступают в АЦП 2, где они преобразуются в цифровой вид и передаются в цифровой спецпроцессор 3. В блоке 4 формируется статический веер характеристик направленности, сигналы с которого последовательно передаются на блок 5 наборы временных реализаций по всем характеристикам направленности. Принципы цифрового преобразование и обработки достаточно подробно приведены в работе («Применение цифровой обработки сигналов» п\р Оппенгейма М. Мир 1980 г. стр. 389-436.) По набранным временным реализациям соседних пространственных каналов в блоке 6 определяют взаимно-корреляционную функцию таким же образом, как и в прототипе. В блоке 7 определяется среднее значения амплитуд выбросов взаимно-корреляционных функций и выбирается порог, равный двум средним значениям (получен экспериментально). После этого в блоке 8 анализируются все амплитуды ВКФ и определяются те, которые превысили порог. Пространственные каналы, где определены амплитуды ВКФ и временные отсчеты, соответствующие этим амплитудам, поступают в блок 9, где производится отбор каналов, в которых амплитуды выбросов имеют одно и то же временное положение, что является характерным для обнаружения эхосигнала в соседних пространственных характеристиках. В блоке 10 производится обработка поступившей информации, определение амплитуд сигналов, определение положения выбранных характеристик направленности и формирование пространственно- временного эхосигнала, который поступает в блок 11 для определения дистанции, курсового угла и пространственно-временной протяженности. На основании выделенных классификационных признаков в блоке 12 осуществляется классификация на классы мало бликовая или много бликовая цель и является она точечной или протяженной. Результат передается в блок 13 управления и отображения.
Таким образом, предлагаемый способ обработки позволяет сократить объем и время вычислительных операций при обработке псеводошумового сигнала.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидролокационный способ классификации объектов | 2022 |
|
RU2791152C1 |
| Гидролокационный способ обнаружения объекта и измерения его параметров | 2018 |
|
RU2697937C1 |
| Способ обработки псевдошумового сигнала в гидролокации | 2020 |
|
RU2739478C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТА И ИЗМЕРЕНИЯ ЕГО ПАРАМЕТРОВ | 2016 |
|
RU2627977C1 |
| Способ обнаружения локального объекта на фоне распределенной помехи | 2019 |
|
RU2736097C1 |
| Способ обнаружения локального объекта на фоне распределенной помехи при бистатической гидролокации | 2019 |
|
RU2736567C1 |
| Гидролокационный способ обнаружения объекта и измерения его параметров | 2017 |
|
RU2674552C1 |
| Гидроакустический способ определения параметров цели при использовании взрывного сигнала с беспроводной системой связи | 2018 |
|
RU2692841C1 |
| Способ измерения скорости движения цели гидролокатором | 2017 |
|
RU2658528C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ЛОКАЛЬНОГО ОБЪЕКТА НА ФОНЕ РАСПРЕДЕЛЕННОЙ ПОМЕХИ | 2016 |
|
RU2634787C1 |
Изобретение относится к области гидроакустики и может быть использовано для построения систем автоматического обнаружения эхосигналов, принятых гидролокатором на фоне шумовой и реверберационной помехи, измерения параметров объекта и его классификации при использовании псевдошумовых сигналов. Способ классификации с использованием псевдошумового сигнала в гидролокации содержит излучение псевдошумового зондирующего сигнала, проведение взаимно-корреляционной обработки, определение временного положения максимума взаимно-корреляционной функции, определения дистанции до объекта локации, определение класса объекта локации, прием эхосигнала осуществляют статическим веером характеристик направленности, максимумы которых пересекаются на уровне не менее 0,7 от максимума, взаимно-корреляционную обработку производят между временными реализациями соседних пространственных каналов, по первому временному набору определяют порог, определяют номера пары каналов, у которых максимум взаимно-корреляционной функции имеет наибольшую амплитуду, определяют временное положение максимумов взаимно-корреляционной функции, превысивших порог в парах пространственных каналов, соседних с парой пространственных каналов, и если временные положения совпадают, то принимают решение о наличии эхосигнала, определяют дистанцию до объекта локации, по номерам выбранных пространственных каналов, соседних с парой пространственных каналов, определяют курсовой угол объекта локации, а по их числу - его угловую протяженность, число отражателей объекта локации определяют по числу максимумов взаимно-корреляционной функции, определяют их временное положение и по разности времен между первым и последним максимумом определяют радиальную протяженность объекта локации, при этом класс объекта локации определяют по полученным характеристикам. 1 ил.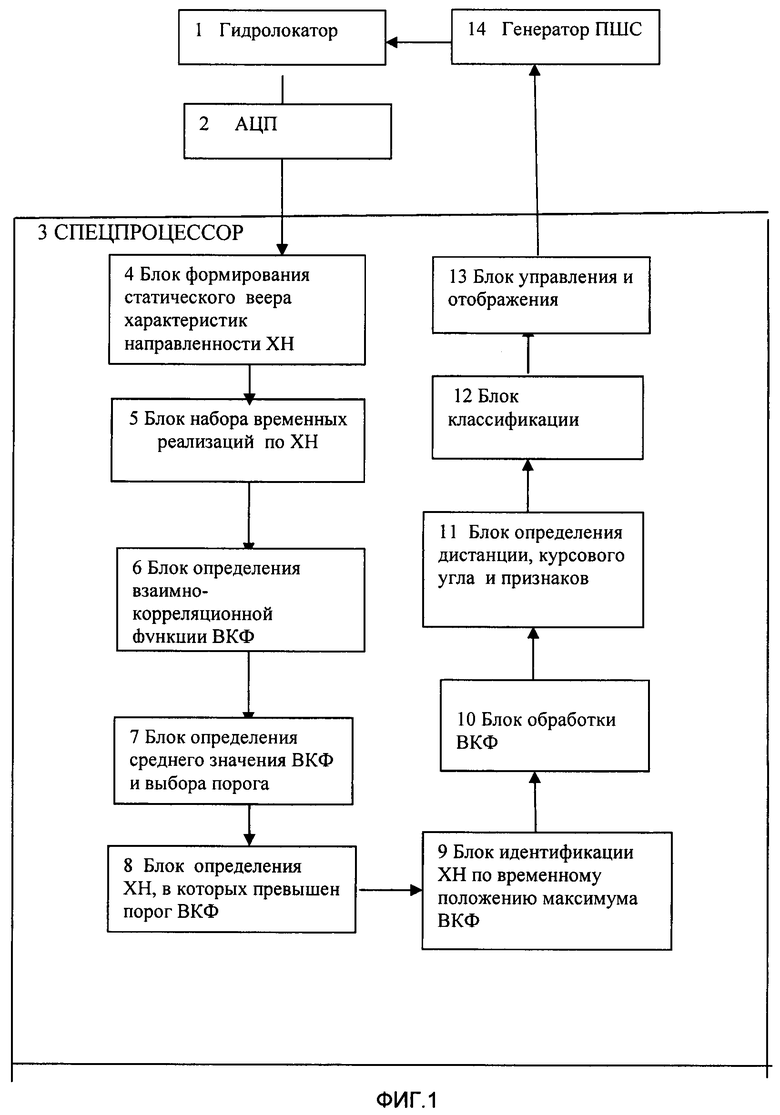
Гидролокационный способ классификации с использованием пседошумового сигнала, содержащий излучение псевдошумового зондирующего сигнала, прием эхосигнала от цели, проведение взаимно-корреляционной обработки, определение временного положения максимумов взаимно-корреляционной функции, определение дистанции, определение протяженности цели, определение числа выбросов взаимно-корреляционной функции, превысивших порог, и определение класса цели, отличающийся тем, что прием сигнала осуществляют статическим веером характеристик направленности, пересекающихся на уровне не менее 0,7 от максимума, набор временных реализаций эхосигнала производят одновременно по всем характеристикам направленности, производят взаимно-корреляционную обработку между соседними пространственными каналами, по первым временным реализациям первых наборов двух соседних пространственных каналов, с которых начинается обработка, находят среднее значение амплитуд полученных взаимно-корреляционных функций, выбирают порог, равный двум его значениям, определяют максимум выбросов взаимно-корреляционных функций, превысивших порог, определяют номера пространственных каналов, которые участвуют в формировании максимума, определяют временное положение выбросов взаимно- корреляционной функции в пространственных каналах, соседних с пространственными каналами, которые участвуют в формировании этого максимума, и если временные положения их совпадают, то принимают решение о наличии в них эхосигнала от цели, по временному положению максимума определяют дистанцию до цели, а по номерам пространственных каналов, которые участвуют в формировании максимума, определяют курсовой угол цели, по числу всех выбранных соседних пространственных каналов, в которых временное положение выбросов взаимно-корреляционных функций совпадают, определяют угловую протяженность цели, при этом радиальную протяженность цели определяют по разности времен между первым и последним временным положением этих выбросов, причем число отражателей цели определяют по числу выбросов, превысивших порог в максимальной взаимно-корреляционной функции, что позволяет классифицировать цель по числу отражателей.
| Способ классификации гидроакустических сигналов шумоизлучения морских объектов | 2018 |
|
RU2711406C1 |
| Способ классификации эхо-сигнала гидролокатора | 2017 |
|
RU2660219C1 |
| СПОСОБ КЛАССИФИКАЦИИ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ ШУМОИЗЛУЧЕНИЯ МОРСКОГО ОБЪЕКТА | 2015 |
|
RU2603886C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ ОБЪЕКТА В ВОДНОЙ СРЕДЕ | 2015 |
|
RU2602759C1 |
| СПОСОБ КЛАССИФИКАЦИИ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ ШУМОИЗЛУЧЕНИЯ МОРСКОГО ОБЪЕКТА | 2013 |
|
RU2546851C1 |
| US 20110128820 A1, 02.06.2011. | |||

