Изобретение относится к области автоматики и может быть использовано на железнодорожном транспорте для контроля и управления пружинно-гидравлического вагонного замедлителя, регулирующего скорость движения отцепов на тормозных позициях механизированных сортировочных горок малой мощности.
Известно автоматизированное устройство механизации сортировочных горок малой мощности на базе энергонезависимых вагонных пружинно-гидравлических замедлителей (ПГЗ), содержащее: напольное оборудование - три секции замедлителя, радиолокационный скоростемер - РИС-В3М, четыре счетчика осей; постовое оборудование - контроллер, автоматизированное рабочее место оператора горки с манипуляторами директивного ввода-вывода аналогового ввода, источник бесперебойного питания, монитор и автоматизированное рабочее место электромеханика (Кобзев В.А., Автоматизация работы малых сортировочных горок, ж. Железнодорожный транспорт, 2006, №3).
Известное устройство осуществляет контроль и управление энергонезависимого замедлителя в ручном и директивном режимах с помощью кнопок с взаимной блокировкой, размещенных на горочном пульте.
В известном устройстве усилие нажатия тормозных шин зависит от давления в гидроцилиндрах замедлителя, создаваемого колесными парами вагонов разных весовых категорий, что может привести к выдавливанию осей колесных пар порожних вагонов. Для обеспечения безопасной работы замедлителя в известном устройстве необходимо в обязательном порядке контролировать развиваемое усилие нажатия тормозных шин в процессе торможения отцепа. Оператор с горочного поста по величине давления в гидроцилиндре замедлителя, измеряемого с помощью дистанционного тензометрического датчика давления, вмонтированного в гидросистему замедлителя, регулирует давление в гидроцилиндрах замедлителя. При этом превышение допустимого для данного отцепа усилия нажатия тормозных шин может привести к выдавливанию осей колесных пар порожних вагонов.
Кроме того, в известном устройстве отсутствует возможность создания достаточного усилия нажатия при проезде тяжелого вагона при первом включении замедлителя, а также существует возможность выдавливания осей колесных пар порожнего вагона после проезда тяжелых вагонов и создании недопустимо высокого давления рабочей жидкости в гидроаккумуляторе замедлителя.
Известное устройство обеспечивает возможность мониторинга развиваемого усилия нажатия тормозных шин в процессе торможения вагонов, которое контролируется с горочного поста косвенным путем по величине давления в гидроцилиндре замедлителя. Перевод одной, двух или сразу трех секций замедлителя в заторможенное положение и возврат в расторможенное состояние, и управление торможением осуществляется в директивном режиме. Для чего оператор с помощью манипулятора «мышь» выбирает необходимую скорость выхода отцепа из тормозной позиции в диапазоне от 1,5 м/с до 4,5 м/с, которую устройство управления реализует, задействуя необходимое количество секций замедлителя ПГЗ.
Однако в известном устройстве отсутствуют средства для определения энергетических характеристик замедлителя - мощности и быстродействия замедлителя.
Задача, на решение которой направлено изобретение, заключается в создании устройства контроля и управления пружинно-гидравлического вагонного замедлителя, обеспечивающего безопасную работу замедлителя, точность торможения при экономии эксплуатационных затрат и электроэнергии в процессе эксплуатации замедлителя, а также контроль энергетических характеристик самого замедлителя.
Технический результат заключается в повышении эффективности управления замедлителем и возможности контроля энергетических параметров замедлителя.
Технический результат достигается тем, что устройство контроля и управления пружинно-гидравлического вагонного замедлителя содержит установленные в зоне контроля напольные устройства - весомер, датчик счета осей и скоростемер, и постовое оборудование - модуль управления и автоматизированное рабочее место оператора, при этом модуль управления включает последовательно соединенные первый преобразователь сигналов, блок анализа и блок принятия решений, первый вход/выход которого по каналу связи соединен с выходом/входом аппаратного программного устройства автоматизированной системы управления станции, второй преобразователь, включенный между выходом весомера и другим входом блока анализа параметров отцепа, блок вывода сигналов управления, входом подключенный к выходу блока принятия решения, а выходом - через первый блок гальванической развязки к входу включения гидрораспределителя пружинно-гидравлического замедлителя, вход процессора аппаратно-программного устройства автоматизированного рабочего места оператора подключен к другому выходу блока анализа, выход - к входу блока отображения, а вход/выход процессора - ко второму выходу/входу блока принятия решений, третий вход/выход которого соединен с выходом/входом пульта управления и индикации автоматизированного рабочего места оператора, выходы датчика счета осей, скоростемера и контактных датчиков давления нажимных педалей замедлителя через второй блок гальванической развязки подключены к соответствующим входам первого блока преобразования.
Сущность полезной модели поясняется фигурой, на которой изображена структурная схема заявляемого устройства контроля и управления пружинно-гидравлического вагонного замедлителя.
Устройство контроля и управления пружинно-гидравлического вагонного замедлителя содержит напольные устройства: весомер 1, датчик 2 счета осей и скоростемер 3, установленные в зоне контроля, и постовое оборудование - модуль 4 управления и автоматизированное рабочее место 5 оператора.
Модуль 4 управления включает последовательно соединенные первый преобразователь 6 сигналов, блок 7 анализа и блок 8 принятия решений, первый вход/выход которого подключен к каналу 9 связи для соединения с аппаратно-программным устройством автоматизированной системы управления станции, второй преобразователь 10, включенный между выходом весомера 1 и другим входом блока 7 анализа параметров отцепа, блок 11 вывода сигналов управления, входом подключенный к выходу блока 8 принятия решения, а выходом - через первый блок 12 гальванической развязки к входу включения гидрораспределителя 13 пружинно-гидравлического замедлителя 14.
Вход процессора 15 аппаратно-программного устройства автоматизированного рабочего места 5 оператора подключен к другому выходу блока 7 анализа, выход - к входу блока 16 отображения, а вход/выход процессора 15 - ко второму выходу/входу блока 8 принятия решений, третий вход/выход которого соединен с входом/выходом пульта 17 управления и индикации автоматизированного рабочего места 5 оператора, выходы датчика 2 счета осей, скоростемера 3 и контактных датчиков 18 давления нажимных педалей замедлителя 14 через второй блок 19 гальванической развязки подключены к входам первого блока 19 преобразования.
Устройство работает следующим образом.
С выхода сервера автоматизированной системы управления станцией по каналу связи 9 на вход блока 8 передаются данные сортировочного листа о порядке роспуска состава. Блок 8 осуществляет анализ сортировочного листа, на основании которого принимает решения по управлению замедлителем. При этом данные о порядке роспуска и параметрах отцепов блок 8 направляет на вход процессора 15, который осуществляет преобразование полученной информации для отображения его на мониторе блока 16.
Сортировочный лист составляют на основе размеченной телеграммы - натурного листа, регламентирующего порядок расформирования конкретного железнодорожного состава на сортировочной станции, параметры отцепа. В соответствии с данными сортировочного листа и фактического накопления вагонов на путях сортировочного парка оператор с помощью установленных на пульте 17 двух кнопок “УВ” - увеличить и “УМ” - уменьшить задает скорость выхода отцепа из тормозной позиции, данные о которой пульт 17 в автоматическом режиме передает в блок 8 принятия решения.
При входе отцепа в зону контроля сигналы с выходов датчика 2 счета осей и скоростемера 3 после гальванической развязки в блоке 19 и соответствующего преобразования в преобразователя 6 поступают соответственно на первый и второй входы блока 7 анализа. При этом на третий вход блока 7 поступает после аналого-цифрового преобразования в преобразователе 10 сигнал с выхода весомера 1.
Блок 7 осуществляет анализ параметров отцепа - в режиме реального времени фиксирует вес, скорость и количество осей во время торможения. Информация о диагностируемых параметрах отцепа с выхода блока 7 поступает в процессор 15, который преобразует ее для отображения на мониторе блока 16. При этом значение фактической скорости отцепа блок 7 направляет в блок 8 принятия решения.
Блок 8 сравнивает величину фактической скорости отцепа с величиной заданной скорости выхода отцепа из тормозной позиции и при ее превышении принимает решение о переводе замедлителя 14 в заторможенное положение.
При этом блок 8 соответствующий информационный сигнал о переводе замедлителя 14 в заторможенное положение передает на пульт 17 для индикации режима торможения в процессор 15 АРМ 5 - для регистрации времени включения рабочего режима замедлителя с последующим отображением его на мониторе блока 16, а также в блок 11 вывода сигналов управления - для формирования управляющего сигнала.
Причем на основании сравнения фактических параметров отцепа и параметров отцепа, указанных в сортировочном листе, оператор может уточнить величину скорости выхода отцепа из тормозной позиции с помощью установленных на пульте 17 двух кнопок “УВ” - увеличить заданную скорость и “УМ” - уменьшить.
Сигнал с выхода блока 11 через блок 12 гальванической развязки поступает на вход включения гидрораспределителя 13 замедлителя 14. При этом в замедлителе 14 жидкость из гидроаккумулятора (на фигуре не показан) поступает в цилиндры нажимных педалей (на фигуре не показаны), которые переводятся в поднятое состояние. При этом контактные датчики 18 давления нажимных педалей поочередно срабатывают. Сигналы с выхода датчиков 18 через блок 7 гальванической развязки и преобразователь 6 поступают на соответствующий вход блока 7, который фиксирует время срабатывания, а следовательно, и факт срабатывания датчиков 18. Данные о времени срабатывания датчиков 18 нажимных педалей блок 7 направляет в процессор 15. При этом по времени формирования сигнала управления для включения замедлителя 14 в рабочее состояние и времени срабатывания контактных датчиков 18 давления нажимных педалей процессор 15 определяет быстродействие срабатывания замедлителя 14.
При наезде первой, а затем и второй колесных пар первой тележки первого вагона отцепа на нажимные педали замедлителя жидкость под давлением поступает в пружинно-гидравлические цилиндры и происходит подъем тормозных балок. При этом нажатие на боковые плоскости колесных пар по окружности качения осуществляется с помощью тарированных пружин, за счет чего осуществляется тормозной эффект и снижается скорость отцепа.
При достижении величины фактической скорости отцепа уровня заданной скорости выхода отцепа из тормозной позиции блок 8 принимает решение о переводе замедлителя в расторможенное положение и формирует соответствующий сигнал, который направляет в процессор 15 и блок 11.
Блок 11 формирует управляющий сигнал и передает его на вход управления гидрораспределителя 13 для перевода замедлителя 14 в расторможенное положение. Процессор 15 на мониторе блока 16 фиксирует время подачи управляющего сигнала на изменение режима работы замедлителя 14.
При расторможении отцепа гидрораспределитель 13 открывает клапана сброса давления из пружинно-гидравлических цилиндров. По мере падения давления в них поочередно срабатывают контактные датчики 18, сигналы с выхода которых через последовательно соединенные блоки 19 и 6 в режиме реального времени поступают в блок 7.
Блок 7 по времени срабатывания контактных датчиков 18 давления фиксирует время изменения положения замедлителя в расторможенное состояние и направляет информацию о нем в процессор 15 и блок 8. Процессор 15 осуществляет соответствующее преобразование полученных сигналов для последующего отображения на мониторе блока 16 времени измерения состояния замедлителя 14, а блок 8 направляет на пульт 17 соответствующий сигнал для измерения индикации режимов работы замедлителя 14.
После расторможения замедлителя 14 по времени торможения, весу отцепа и величине снижения скорости отцепа блок 7 анализа рассчитывает мощность замедлителя 14. Мощность замедлителя рассчитывается для каждого конкретного отцепа.
Таким образом, предлагаемое устройство повышает эффективность управления замедлителем и осуществляет контроль энергетических параметров замедлителя, что позволяет повысить точности торможения отцепов, экономить эксплуатационные затраты и электроэнергию при эксплуатации замедлителя.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СКОРОСТИ ОТЦЕПОВ НА СОРТИРОВОЧНОЙ ГОРКЕ | 1970 |
|
SU279696A1 |
| Комплексная система автоматизации управления сортировочным процессом (КСАУ СП) | 2020 |
|
RU2737815C1 |
| Устройство для контроля коэффициента трения колес вагонов перед роспуском состава на сортировочной горке | 2024 |
|
RU2822298C1 |
| Тренажерный комплекс оперативного персонала сортировочной горки | 2023 |
|
RU2810931C1 |
| ГОРОЧНОЕ ПРОГРАММНО-ЗАДАЮЩЕЕ УСТРОЙСТВО | 1998 |
|
RU2157773C2 |
| ВАГОННЫЙ ЗАМЕДЛИТЕЛЬ | 2008 |
|
RU2360816C1 |
| Устройство для управления технологическим процессом роспуска составов на сортировочной горке | 1981 |
|
SU1073146A1 |
| РАДИОФОТОННАЯ СИСТЕМА ЛОКАЦИОННОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОТЦЕПОВ НА СОРТИРОВОЧНОЙ ГОРКЕ | 2023 |
|
RU2838248C1 |
| РАДИОФОТОННАЯ СИСТЕМА ЛОКАЦИИ ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОТЦЕПОВ НА СОРТИРОВОЧНОЙ ГОРКЕ | 2023 |
|
RU2835234C1 |
| Устройство автоматического управления торможением вагонов замедлителями | 1956 |
|
SU110312A1 |
Изобретение относится к области автоматики. Устройство содержит напольные устройства - весомер, датчик счета осей и скоростемер, а также постовое оборудование - модуль управления и автоматизированное рабочее место оператора. Модуль управления содержит первый преобразователь сигналов, блок анализа параметров отцепа, блок вывода управляющих сигналов и блок принятия решений. Автоматизированное рабочее место оператора состоит из процессора аппаратно-программного устройства, блока отображения и пульта управления и индикации автоматизированного рабочего места оператора. Выходы датчика счета осей, скоростемера и контактных датчиков давления нажимных педалей замедлителя через второй блок гальванической развязки подключены к входам первого блока преобразования. Достигаются повышение эффективности управления замедлителем и возможность контроля энергетических параметров замедлителя. 1 ил.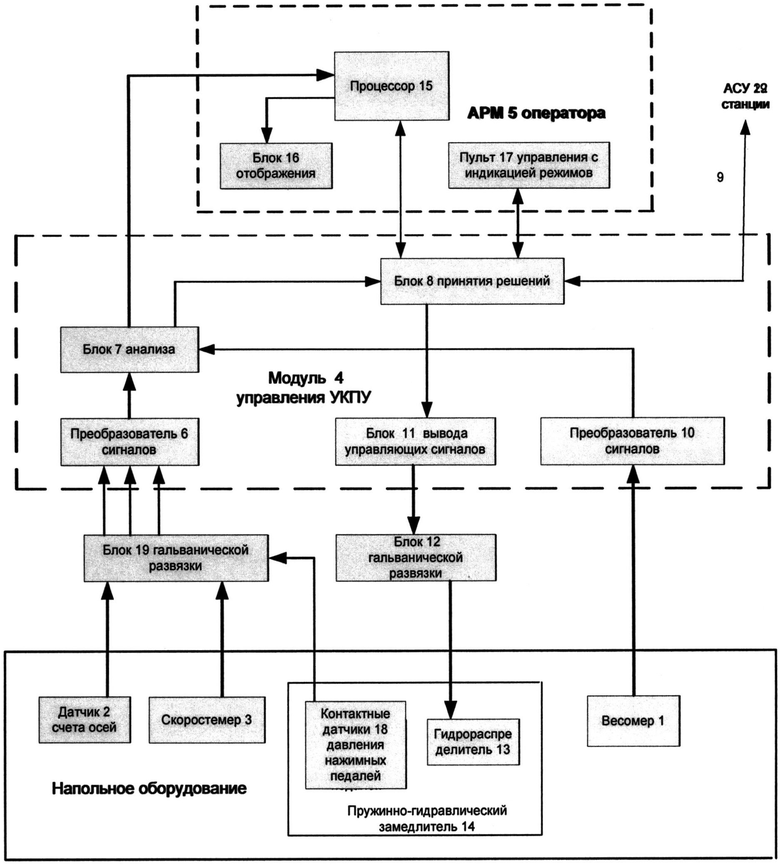
Устройство контроля и управления пружинно-гидравлического вагонного замедлителя, содержащее установленные в зоне контроля напольные устройства - весомер, датчик счета осей и скоростемер, и постовое оборудование - модуль управления и автоматизированное рабочее место оператора, при этом модуль управления включает последовательно соединенные первый преобразователь сигналов, блок анализа параметров отцепа и блок принятия решений, первый вход/выход которого по каналу связи соединен с выходом/входом аппаратного программного устройства автоматизированной системы управления станцией, второй преобразователь, включенный между выходом весомера и другим входом блока анализа параметров отцепа, блок вывода сигналов управления, входом подключенный к выходу блока принятия решения, а выходом - через первый блок гальванической развязки к входу включения гидрораспределителя пружинно-гидравлического замедлителя, вход процессора аппаратно-программного устройства автоматизированного рабочего места оператора подключен к другому выходу блока анализа параметров отцепа, выход - к входу блока отображения, а вход/выход процессора - ко второму выходу/входу блока принятия решений, третий вход/выход которого соединен с входом/выходом пульта управления и индикации автоматизированного рабочего места оператора, выходы датчика счета осей, скоростемера и контактных датчиков давления нажимных педалей замедлителя через второй блок гальванической развязки подключены к соответствующим входам первого блока преобразования.
| Камнеуловитель-чиститель для хлопка-сырца | 1951 |
|
SU99417A1 |
| RU 2008147992 A, 10.06.2010 | |||
| Прибор для паспортизации станочного оборудования | 1932 |
|
SU32211A1 |
| US 2007156305 A1, 05.07.2007 | |||

