Изобретение относится к области вычислительной техники и может быть использовано для определения калибровочных коэффициентов датчика угла поворота управляемых колес и датчика скорости, устанавливаемых на автономном транспортном средстве.
Колесные роботы оснащаются комплексом сенсоров, обеспечивающих возможность локализации робота в пространстве, детектирование целевой траектории и возможных препятствий.
Сенсоры, такие как датчик угла поворота управляемых колес и датчик скорости, в процессе движения колесных роботов регистрируют информацию в собственной системе координат и в собственных единицах измерения. Для приведения показаний сенсоров к общей системе координат и к единой системе физических единиц необходимо проведение процедур калибровки сенсоров.
Из указанной области техники известны следующие технические решения.
Также известен способ калибровки параметров шасси для автоматизированного управляемого транспортного средства (АУТС) по патенту № CN108982116, включающий в себя следующие этапы: получают данные об ориентации, когда АУТС неоднократно выполняет движение между несколькими точками калибровки, при этом данные об ориентации представляют отношения положения между АУТС и несколькими точками калибровки. Данные об ориентации содержат данные, полученные после того, как АУТС достигает любая точка калибровки, данные, полученные после поворота АУТС на заданный угол во всех или части точек калибровки, и данные, полученные АУТС перед движением, в начальной точке калибровки каждого движения цели. На основе данных об ориентации калибруются параметры шасси АУТС, при этом параметры шасси включают коэффициент радиуса колеса и/или коэффициент межосевого расстояния.
Данный вид калибровки выполняется на производстве и требует наличия специально оборудованной площадки. Также данный способ не позволяет калибровать датчик угла поворота колес.
Кроме того, известен способ автоматической калибровки датчика угла наклона сельскохозяйственной техники и положения электрического рулевого колеса (патент № CN108762323). Указанное изобретение предусматривает систему автоматической калибровки положения электрического рулевого колеса, включающую устройство управления навигацией, устройство сенсорного дисплея, рулевое колесо с моторным управлением и устройство датчика угла поворота. Устройство управления навигацией используется для приема дифференциального сигнала и передачи информации о местоположении и соответствующих данных на устройство сенсорного дисплея посредством обработки. Рулевое колесо с электроприводом содержит электродвигатель рулевого колеса и приводное устройство. Приводное устройство управляет двигателем рулевого колеса, чтобы он вращался относительно друг друга, чтобы приводить во вращение колеса. Устройство углового кодера используется для обратной передачи данных об угле поворота переднего колеса в устройство управления навигацией. После автоматической калибровки сельскохозяйственной техники можно управлять транспортным средством для выполнения рулевого управления с помощью рулевого колеса с электрическим управлением.
Недостаток указанного способа заключается в том, что в реальных механических системах угол поворота рулевого колеса не является однозначно связанным с углом поворота колес, руль может иметь люфт. Это может снижать точность оценки угла поворота колес на основе информации по положению руля.
Известен способ оценки угла поворота шины на основе трека транспортного средства по патенту CN113682375, при котором:
- устанавливают антенну GNSS на кузов транспортного средства, а энкодер устанавливают на двигатель рулевого колеса транспортного средства;
- курсовой угол транспортного средства рассчитывается по координатам положения GNSS;
- значение разности курсовых углов и угловая скорость рыскания кузова транспортного средства получаются в соответствии с курсовым углом, полученным путем вычисления;
- абсолютный угол поворота шины рассчитывается по кинематике кузова автомобиля;
- считывается числовое значение энкодера на двигателе рулевого колеса транспортного средства, и числовое значение вычисляется для получения соответствующего угла поворота энкодера;
- когда скорость изменения угла поворота шины превышает установленное пороговое значение, угол поворота шины оценивается с использованием алгоритма фильтрации Калмана.
В рамках указанного способа расчет курсового угла транспортного средства производится на основе локальной линейной аппроксимации как арктангенс deltaNord/deltaEast. При этом измерение координат GNSS сопровождается зашумлением, что может приводить к неустойчивому вычислению в данной формуле и к невысокой точности оценки курсового угла и разности курсовых углов, на которых базируется основной расчет.
Указанное техническое решение наиболее близко по технической сущности к заявленному изобретению и может выступать в качестве прототипа.
Технический результат заявленного изобретения заключается в повышении точности осуществления калибровки датчика угла поворота управляемых колес и датчика скорости.
Технический результат достигается за счет осуществления способа калибровки сенсоров колесной одометрии, при котором в процессе движения автономного транспортного средства (АТС) посредством сенсора навигационной системы регистрируют данные о его местоположении, по полученным данным формируют трек-линию движения АТС на виртуальной карте, отличающегося тем, что в каждой точке трека производят полиномиальную регрессию траектории, определяют вектор скорости, локальную кривизну в точке и радиус кривизны посредством дифференцирования полиномиально-регрессированной траектории, модуль вектора скорости сопоставляют с показаниями датчика скорости, производят накопление данных и определяют искомый калибровочный коэффициент датчика скорости, одновременно в точке трек-линии движения АТС отслеживают показания датчика поворота угла колеса и скорости АТС, с учетом модели АТС кривизну траектории сопоставляют с расстоянием между колесными базами и углом поворота управляющих колес, в результате чего получают значения датчиков поворота угла колеса и скорости АТС, производят полиномиальную регрессию множества накопленных точек и вычисляют полином, коэффициенты которого являются калибровочными.
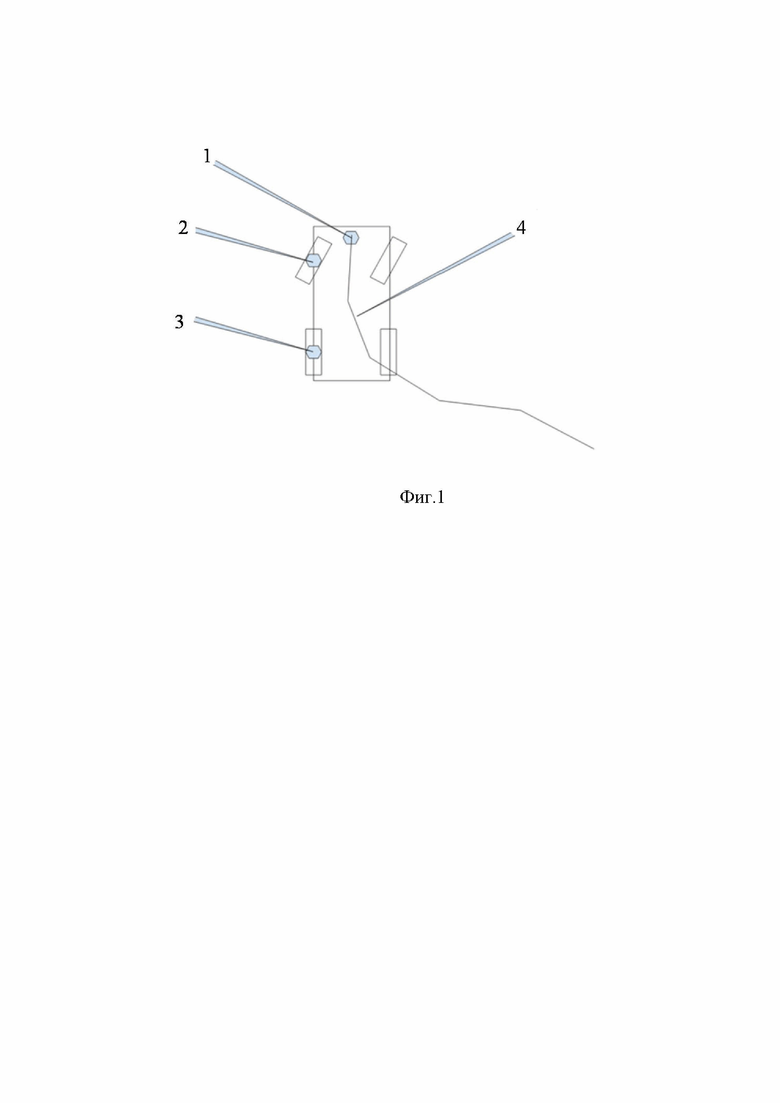
На фиг.1 представлена схема расположения сенсоров колесной одометрии на автономном транспортном средстве, где 1 – сенсор навигационной системы, выполненный в виде антенны GNSS, 2 – датчик угла поворота управляемых колес, 3 – датчик скорости, 4 – траектория, зарегистрированная в процессе движения АТС.
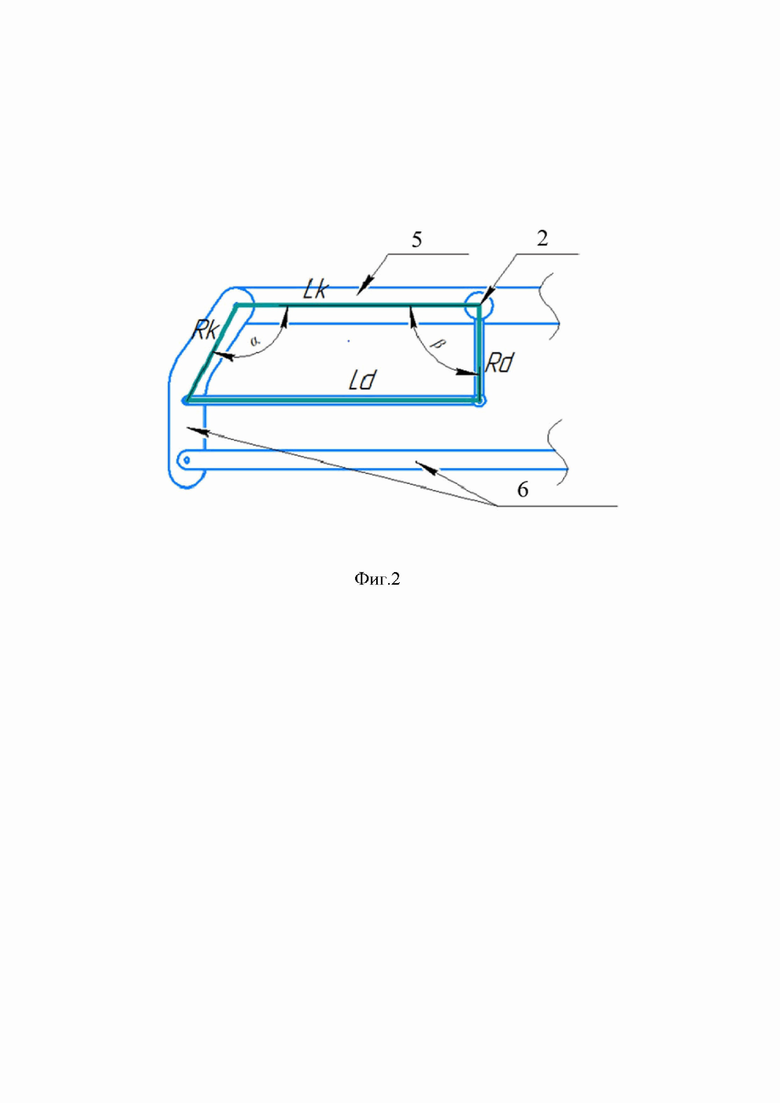
На фиг.2 представлена конструктивная схема взаимного расположения датчика угла поворота (2) и колеса автономного транспортного средства (робота), где 5 – вал колеса Lk, 6 – рулевая трапеция Rk.
На фиг.2 показано, каким образом устанавливаются две дополнительные штанги Rd и Ld с шарнирным соединением, в результате чего образуется четырехугольник со сторонами Rk, Lk, Rd, Ld. При этом, датчик угла поворота (2) измеряет угол между ребрами Lk и Rd – β, а угол поворота колеса равен углу между ребрами Lk и Rk – α. Между углом поворота колеса и углом датчика существует тригонометрическая зависимость, которая в общем случае может быть приближена кубической интерполяцией.
Способ калибровки сенсоров колесной одометрии, в предпочтительном варианте, реализуется следующим образом (фиг.1, фиг.2).
Для реализации предлагаемого способа датчик угла поворота колес (2), связанный с колесом автономного транспортного средства шарнирной передачей, в совокупности с точкой крепления к колесу и центром поворота колеса на оси образуют четырехугольник (фиг.2).
Также во многих моделях АТС присутствует датчик скорости (3), показания которого могут транслироваться через CAN шину устройства. Но датчик скорости определяет скорость по скорости вращения вала и может иметь погрешность, в зависимости от того, какие шины используются на АТС. Таким образом, значение датчика скорости также может калиброваться введением поправочного коэффициента.
В процессе движения автономного транспортного средства (АТС) посредством сенсора навигационной системы, выполненного в виде антенны GNSS (1), установленной на его кузове, регистрируют данные о местоположении АТС в геодезических единицах измерения – широту и долготу, а также может передаваться высота над уровнем моря (в зависимости от модели используемого сенсора). С учетом того, что движение осуществляется по условно плоской поверхности, высота может игнорироваться.
Параметры местоположения АТС, такие как широта, долгота, а также опционно, высота, полученные от GNSS сенсора в конкретный момент времени, поступают в вычислительный блок с периодичностью работы GNSS сенсора.
По мере поступления широты и долготы координаты преобразуются в локальную метровую систему координат XY с помощью проекции Меркатора с использованием той или иной модели геоида, известной из уровня техники. Таким образом, внутри вычислительного блока формируется последовательность записей вида <X, Y, T>, то есть последовательность координат движения (x, y), привязанных к времени t.
Последовательность координат <X, Y, T> обозначим как трек-линия движения, которая представляет собой аппроксимацию движения АТС.
Затем, в каждой точке полученного трека движения производят полиномиальную регрессию траектории, в виде полиномиальных зависимостей вида:
Х(t) = P3(t), Y(t) = Q3(t); где P3(t) и Q3(t) – полиномы третьей степени от t.
Указанные полиномы задаются коэффициентами при 0, 1, 2, 3 степени, то есть имеют вид X(t) = p0 + p1·t + p2·t2 + p3·t3; Y(t) = q0 + q1·t + q2·t2 + q3·t3;
Если в очередной точке ломаной XiYi траектория локально может быть приближена как полиномы <x(t), y(t)> = <P3(t), Q3(t) >, то кривизна траектории может быть рассчитана следующим образом:
и которая может быть представлена в 3х-мерном случае как:

Приведенная формула расчета кривизны траектории параметрически заданной траектории является известным результатом математического анализа и представлена, в частности, в онлайн-версии учебника Л.Д. Кудрявцева «Краткий курс математического анализа» по адресу http://nuclphys.sinp.msu.ru/mathan/p1/m1802.html.
В формуле используются следующие обозначения:
r' – первая производная траектории; r'' – вторая производная траектории; x', y', z' – производные координатных функций; x', y'', z'' – вторые производные координатных функций.
Если в рамках метода игнорируются колебания высоты z (то есть осуществляется движение по плоской площадке), то z' и z'' равны нулю и остается не нулевой третий член, для которого можно рассчитать значения производных x', y', x'', y'' как производные полиномов P3(t), Q3(t).
Таким образом, после полиномиальной регрессии траекторий в каждой точке трек-линии движения можно оценить кривизну.
Также, определяют вектор скорости как производную полиномов x' (t), y' (t) по времени, сопоставляют с показаниями датчика скорости, производят накопление данных о местоположении АТС и кривизне движения в вычислительном блоке, а затем определяют искомый коэффициент датчика скорости следующим образом:
| VGNSS |= | <x'(t), y' (t)> | = k_speed*fb_speed,
где k_speed – искомый калибровочный коэффициент пропорциональности;
fb_speed – скорость АТС, полученная по показаниям датчика скорости.
Вместе с тем, посредством датчика угла поворота управляемых колес (2) регистрируют угол поворота в условных единицах, производят накопление статистики кривизны траектории движения АТС в памяти вычислительного блока, определяют величину угла поворота колеса в зависимости от кинематической модели АТС, в частности модель с передними управляющими колесами, модель с задними управляющими колесами или шарнирно-сочлененная модель АТС.
В рамках кинематической модели движения кривизна траектории колесного робота связана уравнениями с углом поворота колес, расстоянием между колесными осями и другими параметрами – в зависимости от модели транспортного средства. В частности, для колесного робота с двумя параллельными колесными осями и передними управляющими колесами (например, обычный автомобиль) зависимость угла поворота колес и кривизны траектории в контексте велосипедной модели выражается как
angle = atan (axle_base * curvature);
где axle_base – расстояние между колесными базами;
curvature – радиус кривизны траектории.
По результатам проведения вышеуказанных этапов предлагаемого способа получают два распределения – угла поворота датчика fb(t) и угла поворота управляемых колес angle(t).
С учетом геометрии шарнира привода сенсора, который образует четырехугольник, можно определить тригонометрическую зависимость между углом поворота колеса и углом поворота датчика (фиг.2).
Как показывают расчеты, при малых углах зависимость носит линейный характер, при увеличении углов зависимость начинает носить характер, близкий к кубической параболе.
Аппроксимация зависимости fb(angle) в виде кубической зависимости в данной задаче является часто используемым приемом. В таком случае ответом калибровки являются коэффициенты кубического полинома k0, k1, k2, k3 при соответствующих степенях fb, которые могут быть получены методом полиномиальной регрессии, что позволяет рассчитать угол поворота колес angle в зависимости от значений датчика угла поворота fb и далее оценивать траекторию движения колесного робота.
Изобретение относится к области вычислительной техники для определения калибровочных коэффициентов датчика угла поворота управляемых колес и датчика скорости, устанавливаемых на автономном транспортном средстве. Способ калибровки сенсоров колесной одометрии состоит в том, что регистрируют данные о местоположении, формируют трек-линию движения АТС на виртуальной карте, в каждой точке трека производят полиномиальную регрессию траектории, определяют вектор скорости, локальную кривизну в точке и радиус кривизны посредством дифференцирования полиномиально-регрессированной траектории, модуль вектора скорости сопоставляют с показаниями датчика скорости, производят накопление данных, определяют искомый калибровочный коэффициент датчика скорости, одновременно в точке трек-линии движения АТС отслеживают показания датчика поворота угла колеса и скорости АТС, получают значения датчиков поворота угла колеса и скорости АТС, производят полиномиальную регрессию множества накопленных точек и вычисляют полином, коэффициенты которого являются калибровочными. Технический результат - повышение точности осуществления калибровки датчика угла поворота управляемых колес и датчика скорости. 2 ил.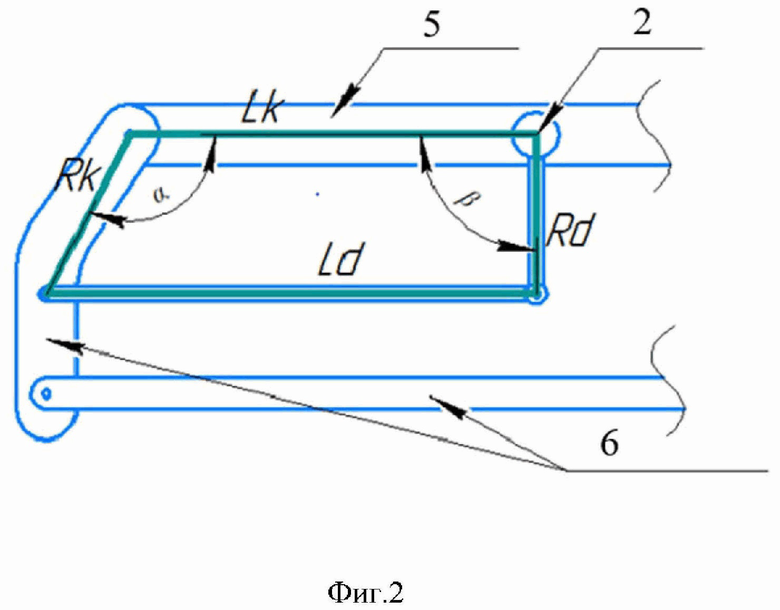
Способ калибровки сенсоров колесной одометрии, при котором в процессе движения автономного транспортного средства (АТС) посредством сенсора навигационной системы регистрируют данные о его местоположении, по полученным данным формируют трек-линию движения АТС на виртуальной карте, отличающийся тем, что в каждой точке трека производят полиномиальную регрессию траектории, определяют вектор скорости, локальную кривизну в точке и радиус кривизны посредством дифференцирования полиномиально-регрессированной траектории, модуль вектора скорости сопоставляют с показаниями датчика скорости, производят накопление данных и определяют искомый калибровочный коэффициент датчика скорости, одновременно в точке трек-линии движения АТС отслеживают показания датчика поворота угла колеса и скорости АТС, получают значения датчиков поворота угла колеса и скорости АТС, производят полиномиальную регрессию множества накопленных точек и вычисляют полином, коэффициенты которого являются калибровочными.
| CN 108982116 A, 11.12.2018 | |||
| НЕПОДВИЖНАЯ МАТРИЦА ОБРЕЗНОГО АВТОМАТА | 0 |
|
SU274632A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УКЛОНОВ, КРИВИЗНЫ, НЕРОВНОСТИ И КОЭФФИЦИЕНТА СЦЕПЛЕНИЯ ДОРОЖНОГО ПОКРЫТИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2162202C1 |
| WO 1992010720 A1, 25.06.1992 | |||
| СПОСОБ ИЗГОТОВЛЕНИЯ ПОРИСТОГО КРЕМНИЯ | 2014 |
|
RU2547515C1 |

