Область
Изобретение относится к аппаратам, методам, компьютерным программам и машиночитаемым носителям.
Уровень техники
Следующее описание уровня техники может содержать предположения, открытия, интерпретации или раскрываемую информацию, или ассоциации вместе с раскрываемой информацией, бывшие неизвестными в рамках соответствующего уровня техники до появления настоящего изобретения, но представленные в настоящем изобретении. Некоторые такие достижения изобретения могут быть отдельно выделены ниже, тогда как другие такие достижения изобретения станут понятны из контекста.
Гироскоп - это устройство, предназначенное для измерения или обеспечения ориентировки, обычно путем измерения угловой скорости вращения относительно определенной оси. Гироскопы могут изготавливаться на базе нескольких технологий, но гироскопы на базе микроэлектромеханических систем (МЭМС) становятся наиболее популярными, особенно в области потребительской электроники и в прочих областях крупномасштабного применения, благодаря низкой заводской себестоимости, размеру и малому энергопотреблению. МЭМС-гироскопы обычно являются вибрационными гироскопами. Гироскопы используются для определения местоположения.
Датчики ускорения, или акселерометры, предназначены для определения изменения силы в результате падения, опрокидывания, движения, позиционирования, удара и/или вибрации. Они также могут быть изготовлены на базе МЭМС-технологии. Датчики ускорения, или акселерометры, используются для определения местоположения.
Магнитометр - это измерительное устройство, используемое для измерения интенсивности или направления магнитных полей. Магнитометры используются для определения местоположения.
Краткое описание
В соответствии с рефератом настоящего изобретения представлен инерциальный блок, устройство и способ, представленные в сопутствующих отдельных пунктах формулы изобретения.
В соответствии с рефератом настоящего изобретения представлен инерциальный блок для крепления к вращающемуся узлу транспортного средства, этот узел сочленен с силовым оборудованием транспортного средства, при этом инерциальный блок содержит по меньшей мере один датчик ускорения и/или по меньшей мере один магнитометр, выполненный с возможностью определения угла наклона вращающегося узла, и/или по меньшей мере одно счетное устройство, выполненное с возможностью определения количества вращений вращающегося узла, и по меньшей мере один гироскоп, выполненный с возможностью определения направления на уровне обода вращающегося узла в целях предоставления информации об углах для определения положения.
В соответствии с рефератом настоящего изобретения представлено устройство для крепления к вращающемуся узлу транспортного средства, причем вращающийся узел сочленен с силовым оборудованием транспортного средства, при этом инерциальный блок содержит по меньшей мере один датчик ускорения и/или по меньшей мере один магнитометр, выполненный с возможностью определения угла наклона вращающегося узла, и/или по меньшей мере одно счетное устройство, выполненное с возможностью определения количества вращений вращающегося узла, и по меньшей мере один гироскоп, выполненный с возможностью определения направления на уровне обода вращающегося узла в целях предоставления информации об углах для определения положения, а также средство (210) для обработки данных, содержащих информацию об угле наклона и/или измеренную частоту вращения и информацию об углах путем использования угла наклона и/или измеренной частоты вращения для преобразования по меньшей мере одной системы координат, а также путем использования показателей вращения вращающегося узла для компенсации смещения гироскопа в целях компенсации неточности угловых характеристик.
В соответствии с рефератом настоящего изобретения представлен способ, содержащий: получение данных об угле наклона вращающегося узла транспортного средства и/или частоте вращения и углах, и обработку данных путем использования угла наклона или частоты вращения для преобразования по меньшей мере одной системы координат, а также путем использования вращения вращающегося узла для компенсации смещения гироскопа в целях компенсации неточности угловых характеристик.
Перечень чертежей
Ниже описаны некоторые варианты осуществления настоящего изобретения, только в виде примеров, со ссылкой на приложенные чертежи, в которых
на Рис. 1 показан пример инерциального блока;
на Рис. 2 показан пример устройства;
на Рис. 3 представлена технологическая карта;
на Рис. 4 представлен пример применения, и
на Рис. 5 представлен другой пример применения.
Описание некоторых вариантов осуществления изобретения
Представленные ниже варианты осуществления изобретения являются только примерами. Хотя технические характеристики могут относиться к «какому-либо», «одному» или «нескольким» вариантам осуществления изобретения в нескольких местах по тексту, это не всегда означает, что каждая такая ссылка относится к одному и тому же варианту осуществления изобретения, или, что конкретная характеристика относится только к одному варианту осуществления изобретения. Отдельные характеристики разных вариантов осуществления изобретения могут также комбинироваться в целях показа другого варианта осуществления изобретения.
Гироскоп - это устройство, предназначенное для измерения или обеспечения ориентировки, обычно путем измерения угловой скорости вращения относительно определенной оси. Гироскопы могут изготавливаться на базе нескольких технологий, но гироскопы на базе микроэлектромеханических систем (МЭМС) становятся наиболее популярными, особенно в области потребительской электроники и в прочих областях крупномасштабного применения, благодаря низкой заводской себестоимости, размеру и малому энергопотреблению. МЭМС-гироскопы обычно являются вибрационными гироскопами.
Гироскопы, реализованные на основе МЭМС-технологии, характеризуются меньшей точностью, чем кольцевые лазерные гироскопы или интерференционные оптоволоконные гироскопы, в частности, из-за ошибок, вызванных смещением. Следовательно, традиционные инерциальные навигационные методы с применением точных гироскопов обычно не пригодны в случае использования инерциальных блоков на основе МЭМС, поскольку в этом случае требуются методы повышения точности.
Качество МЭМС-гироскопа обычно определяется величиной постоянной суммируемой непрогнозируемой части погрешности смещения. При определении местоположения измеренные значения угловой скорости от одного или нескольких МЭМС-гироскопов обычно интегрируются в целях определения изменения ориентировки, например, значение угла, выражающее изменение курса транспортного средства. Таким образом, постоянные погрешности смещения значения угловой скорости также включаются в погрешность измерения угла. Постоянную часть смещения можно, по меньшей мере, частично, исключить путем применения карусельного механизма. Карусельный механизм, как правило, обеспечивает управляемое вращение устройства позиционирования относительно двух или более осей. Кроме того, для карусельного механизма требуется средство определения необходимого изменения угла. Другим методом является проведение измерений на неподвижном транспортном средстве и усреднение результатов измерений в целях получения оценки смещения. Однако, эти методы не эффективны во многих случаях практического применения из-за затрачиваемого времени и переменного во времени характера работы стандартного МЭМС-гироскопа (его показания могут меняться при каждом включении питания, изменении температуры и т.д.). Следует учитывать, что для карусельного механизма также требуется дополнительное оборудование, что может быть экономически невыгодно.
При использовании карусельного механизма для исключения постоянного смещения (по крайне мере, частично, в зависимости от требуемой точности) обычно требуется повторяющееся вращение и информация о времени, затраченном на совершение полного оборота (360°). Таким образом, для транспортных средств можно использовать вращение колеса: колеса вращаются во время движения транспортного средства, и это вращение может быть измерено самим транспортным средством или с помощью дополнительных датчиков. Таким образом, устройство, предоставляющее информацию для определения положения, может крепиться на колесо или шину, или на любой другой вращающийся узел (например, педаль или ножной привод) транспортного средства, который связан с движением транспортного средства. Транспортным средством может быть устройство или средство перевозки, передвигающееся путем использования одного или нескольких колес или шин, например, легковой автомобиль, грузовик, прицеп, грузовая машина, фургон, трактор, вилочный погрузчик, мотоцикл, велосипед, мопед, жилой автофургон, экскаватор, транспортные средства или машины, используемые в шахтах или в портах и т.п.
Варианты осуществления изобретения пригодны для определения местоположения транспортного средства и для навигации, например, при отсутствии связи с глобальной системой позиционирования (GPS), глобальной навигационной спутниковой системой (ГЛОНАСС) или прочими аналогичными системами.
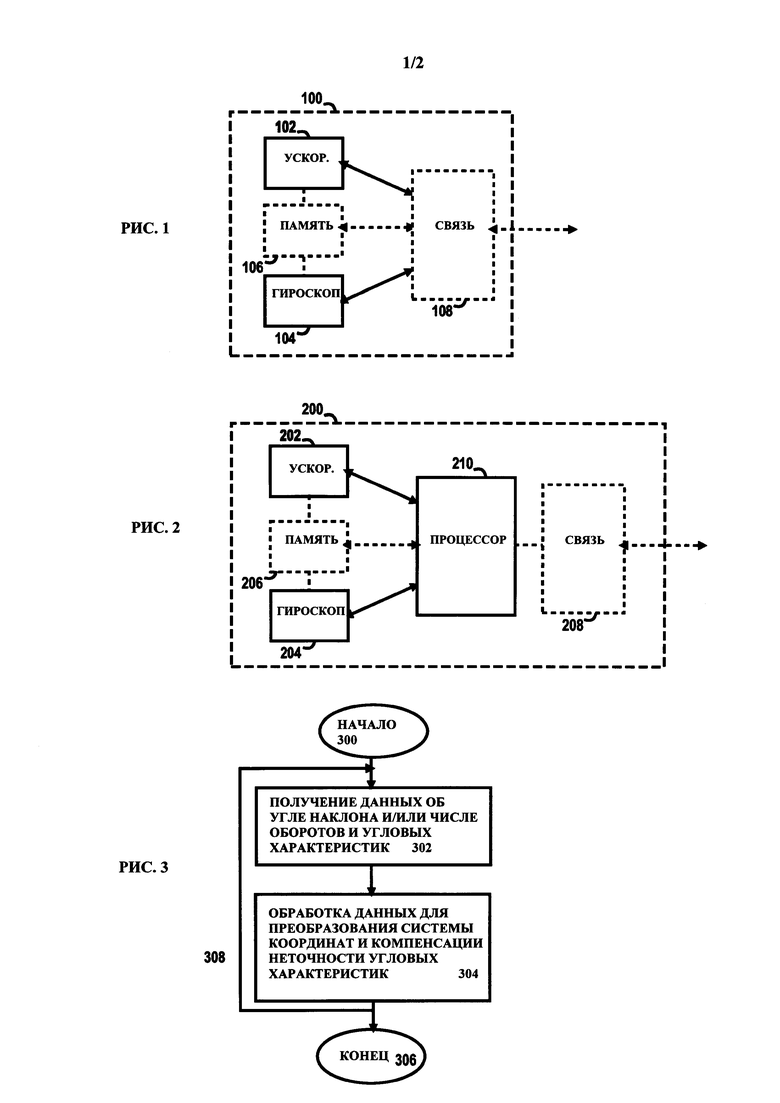
Один вариант изобретения может быть реализован с помощью инерциального блока, закрепляемого на колесе транспортного средства. Инерциальный блок крепится к вращающемуся узлу транспортного средства, при этом вращающийся узел напрямую или опосредованно сочленен с силовым оборудованием транспортного средства (опосредованное сочленение может означать, например, что вращающимся узлом является заднее колесо переднеприводного транспортного средства). Другими словами, вращающимся узлом может быть колесо, шина, кривошип и т.п. Термин «силовое оборудование» используется для обозначения двигателей, моторов, средств силовой трансмиссии, аккумуляторов, приводов, цепей мотоциклов и т.п. Следует учитывать, что обычное рулевое колесо обычно не подходит для варианта осуществления изобретения (у него отсутствует регулярное повторяющееся вращение). Один пример инерциального блока показан на рис. 1.
Приведенный в качестве примера инерциальный блок 100 содержит: по меньшей мере один датчик ускорения и/или по меньшей мере один магнитометр, выполненный с возможностью определения угла наклона вращающегося узла, и/или по меньшей мере одно счетное устройство 102, выполненное с возможностью определения количества вращений вращающегося узла, и по меньшей мере один гироскоп 104, выполненный с возможностью определения направления на уровне обода вращающегося узла в целях предоставления информации об углах для определения положения.
Другим вариантом осуществления изобретения является устройство, которое крепится к вращающемуся узлу транспортного средства, при этом вращающийся узел сочленен с силовым оборудованием транспортного средства. Другими словами, вращающимся узлом может быть колесо, шина, кривошип и т.п. Термин «силовое оборудование» используется для обозначения двигателей, моторов, средств силовой трансмиссии, аккумуляторов, приводов, цепей мотоциклов и т.п. Следует учитывать, что обычное рулевое колесо обычно не подходит для варианта осуществления изобретения. Один пример устройства описан на рис. 2.
Это служащее примером устройство 200, содержащее: по меньшей мере один датчик ускорения и/или по меньшей мере один магнитометр, выполненный с возможностью определения угла наклона вращающегося узла, и/или по меньшей мере одно счетное устройство 202, выполненное с возможностью определения количества вращений вращающегося узла, по меньшей мере один гироскоп 204, выполненный с возможностью определения направления на уровне обода вращающегося узла в целях предоставления информации об углах для определения положения, а также средство 210 для обработки данных, содержащих информацию об угле наклона и/или измеренную частоту вращения и информацию об углах путем использования угла наклона и/или измеренной частоты вращения для преобразования по меньшей мере одной системы координат, а также путем использования показателей вращения вращающегося узла для компенсации смещения гироскопа в целях компенсации неточности угловых характеристик. Средством обработки данных может быть, либо такое средство может содержать процессор, набор микросхем, блок или модуль, содержащий несколько процессоров, компьютерная программа или носитель, содержащий компьютерную программу. Носителем может быть блок или устройство, способное содержать в себе программу, и это может быть энергонезависимый носитель. Компьютерные программы, также называемые программными продуктами или программами, в том числе системные программы, апплеты и макросы, могут храниться в любой машиночитаемой памяти, и в них включены инструкции для выполнения определенных задач. Компьютерные программы могут шифроваться языком программирования, которым может быть язык программирования верхнего уровня, например, объективный -С, С, С++, С#, Java, и т.п., или язык программирования нижнего уровня, например, машинный язык или ассемблер.
Устройство может быть реализовано различными средствами, например, С помощью аппаратного обеспечения (одно или несколько устройств), встроенное программное обеспечение (одно или несколько устройств), программное обеспечение (один или несколько модулей), или их комбинации. Программным обеспечением может быть компьютерная программа, предназначенная для выполнения требуемых вычислений, иначе, инерциальный блок обычно содержит части аппаратного обеспечения по отдельности или в сочетании с программным обеспечением. Компьютерная программа может храниться на машиночитаемом носителе, например, на магнитных дисках, картах, лентах и т.п. Для предоставления информации о направлении для вычисления траектории требуется, как правило, два датчика ускорения.
Устройство или инерциальный блок может содержать средство хранения данных, например, один или несколько блоков памяти 106 или 206. Блоки памяти могут содержать энергозависимое и/или энергонезависимое запоминающее устройство. Блок памяти может хранить код компьютерной программы и/или операционную систему, информацию, данные, содержание или аналогичные данные для того, чтобы процессор выполнял операции в соответствии с вариантом осуществления изобретения. Каждый блок памяти может представлять собой оперативное запоминающее устройство, жесткий диск и т.п. Блок памяти может быть по меньшей мере частично извлекаемым и/или соединенным с устройством с возможностью демонтажа. Запоминающее устройство может быть любого типа, подходящего для текущей технической среды, и оно может быть реализовано при помощи любых подходящих технологий хранения данных, например, полупроводниковых технологий, флэш-памяти, магнитных и/или оптических запоминающих устройств. Запоминающее устройство может быть стационарным или съемным.
Кроме того, устройство или инерциальный блок могут также содержать в себе средства связи 108 или 208, при этом устройство сконфигурировано для обработки данных, получаемых инерциальным блоком. Эти средства могут представлять собой радиоприемопередатчик/передатчик или радиоканал (Bluetooth©, Zigbee©, WiFi©, беспроводную ЛВС (WLAN), технологии радиочастотного определения (RFID) и т.д.). Другим вариантом является использование магнитного кодирования, применяемого в смарт-картах, например, в кредитных картах. В этом случае инерциальный блок может содержать, или быть подключенным к блоку связи, способному расшифровывать данные и передавать их на устройство обработки, например, на навигационное устройство (GPS) или любое другое устройство, имеющее подходящие средства обработки данных. Блок связи также может считать количество оборотов вращающегося узла. В этом случае, если скорость достаточно высока, данные, получаемые датчиками ускорения или магнитометрами могут быть не востребованы, но могут использоваться для повышения точности. Еще одним вариантом является использование счетного устройства, примеры которого приводятся ниже.
Ниже подробно описывается вариант применения метода. В рамках описания метода также разъясняются некоторые аспекты инерциального блока и/или устройства в отношении, например, обработки данных. Для разъяснения в качестве примера используется пример на рис. 1. Варианты применения метода могут быть реализованы в соответствующем объеме в инерциальном блоке или устройстве, описанных выше.
Вариант начинается с блока 300 на рис. 3.
Блок 302 получает данные об угле наклона вращающегося узла транспортного средства и/или частоте вращения и углах.
Эту информацию можно получать с помощью радиоприемопередатчика/приемника или радиоканала (Bluetooth©, Zigbee©, WiFi©, WLAN, RFID и т.д.). Другим вариантом является использование магнитного кодирования, применяемого в смарт-картах, например, в кредитных картах. Также магнитошифрованные данные могут читаться удаленно. В случае использования устройства, включающего в себя средство для обработки данных, для применения метода, возможно внутреннее получение данных, как в обычных электронных устройствах, с передачей после обработки для дальнейшего применения, например, для вывода на электронную карту или для применения с использованием дополненной реальности в целях управления транспортными средствами или машинами.
Угол наклона выражает угловое положение вращающегося узла, например, колеса, шины, педали или ножного провода.
В блоке 304 выполняется обработка данных об угле наклона и/или определенном количестве оборотов с преобразованием по меньшей мере одной системы координат и путем использования вращения вращающегося узла в целях компенсации смещения гироскопа для компенсации неточности угловых характеристик.
Сначала приводится объяснение преобразования системы координат.
Одним из вариантов размещения компонентов вектора в другой системе координат является использование матрицы направляющих косинусов. Матрица направляющих косинусов - это, как правило, матрица 3×3, преобразующая вектор А в систему координат В следующим образом:

где
mB - вектор в системе координат В,
mA - вектор в системе координат А
С - матрица направляющих косинусов,
А - исходная система координат, и
В - преобразованная целевая система координат.
Если углы между базисным векторами систем координат известны, матрицу направляющих косинусов можно определить следующим образом:

где
(u, v, w) - ортонормированный базис системы координат В, (e1, е2, е3) - ортонормированный базис системы координат А. При наличии 3 ортогонально установленных гироскопов матрицу направляющих косинусов, преобразующую векторы из системы координат инерциального блока в инерциальную систему координат, можно обновить или оценить следующим образом:

где

и  - кососимметричная матрица формы:
- кососимметричная матрица формы:

где матрица  образована с помощью информации, полученной гироскопом (скалярные величины р, q, r) относительно трех осей:
образована с помощью информации, полученной гироскопом (скалярные величины р, q, r) относительно трех осей:

где
Т - транспозиция матрицы.
Для получения более точного координатного преобразования одну или две из скалярных величин (р, q, r) можно заменить данными, полученными от акселерометра, магнитометра (или устройства подсчета количества полных оборотов). Таким образом, как правило, требуется только один или два гироскопа.
Вариант осуществления изобретения в отношении преобразования матрицы описан выше в общем случае на основе работы Titterton, D.Н. and Weston, J. L, 2004 «Strapdown Inertial Navigation Technology)), 2nd edition (Reston, VA: AIAA), которая использована здесь в качестве ссылки для разъяснения преобразования системы координат.
Следует отметить, что вместо акселерометров или магнитометров можно использовать тормозной диск или тормозную колодку в комбинации с реле или магнитом. В этом варианте осуществления изобретения для подсчета количества полных оборотов можно использовать постоянный магнит. В этом применении комбинация тормозного диска или тормозной колодки с магнитом или реле называется счетным устройством. Дополнительно возможно использование динамо-машины для получения энергии от вращения вращающегося узла.
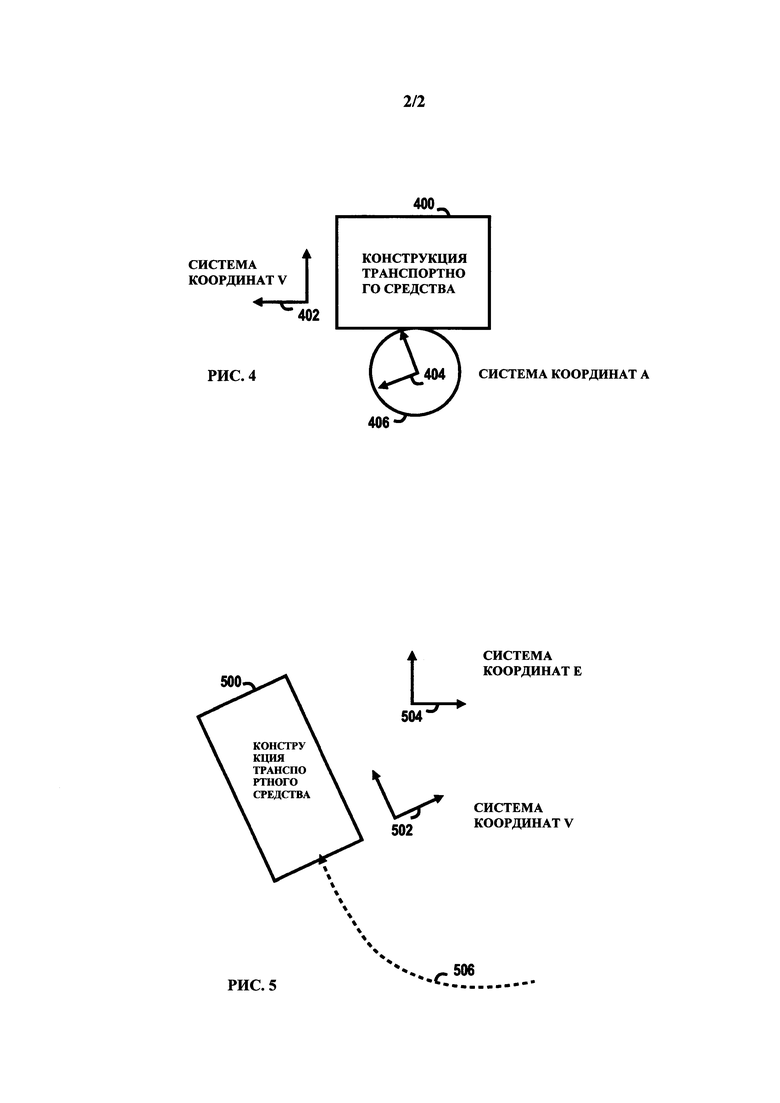
Системы координат показаны на рис. 4. Следует понимать, что эти координаты приведены здесь только для примера и в соответствующих применению условиях могут использоваться другие координаты. На рис. 1 показаны система координат V 402 относительно конструкции 400 транспортного средства и система координат А 404 относительно колеса (вращающегося узла) 406 транспортного средства 400.
Для определения местоположения могут быть оценены перечисленные ниже переменные состояния. Переменные состояния описаны с помощью системы координат, показанной на рис. 1 в качестве примера. Эти переменные состояния приведены здесь только в качестве примеров:
Угол сдвига фаз, или фазовый угол, другими словами - величина вращения вращающегося узла, например, колеса, когда вертикальная ось (ось х) системы координат А указывает вверх. Угол сдвига фаз может быть неограниченным, и значения вычисляются по 2π.
Пройденное расстояние (d) и/или пройденное расстояние за заданный промежуток времени (Δd). Эти переменные состояния можно получить, умножив величину угла сдвига фаз на известный радиус вращающегося узла. На Рис. 5 показано, что в случае поворота самого транспортного средства угол этого поворота можно определить путем использования дополнительной системы координат, а именно, системы координат Е 504. Когда система координат V 502 используется относительно транспортного средства или конструкции 500 транспортного средства, система координат Е используется относительно карты или экрана и т.д. таким образом, чтобы система координат Е показывала северную отметку карты или одно или несколько других соответствующих направлений. Таким образом, угол транспортного средства (курс) можно определить путем сравнения системы координат V с системой координат Е. Такое сравнение дает информацию о направлении транспортного средства (w) в двухмерном пространстве. Пример траектории представлен справочным номером (506).
При использовании уравнения (5) координаты расположения транспортного средства можно выразить как

где
х - координатная точка относительно первой горизонтальной оси (например, восточная отметка),
y - координатная точка относительно второй горизонтальной оси (например, северная отметка),
z - координатная точка относительно оси, описывающей глубину или третье измерение (нуль в двухмерном пространстве), и
t - транспозиция матрицы.
Информацию о месторасположении можно оценить или обновить следующим образом:

где
Δр - изменение расположения,
Δd - изменение пройденного расстояния в заданный промежуток времени, и
 - преобразование системы координат транспортного средства в систему координат приложения, например, карту.
- преобразование системы координат транспортного средства в систему координат приложения, например, карту.
Матрицу  можно оценить или обновить с помощью данных, полученных гироскопом после преобразования в систему координат V. Данные обычно представляют собой интеграл изменения фазового угла. При использовании нескольких гироскопов данные могут иметь векторную форму. В одном варианте осуществления изобретения использованы два гироскопа и измерения можно провести на уровне обода с угловым интервалом около 90°.
можно оценить или обновить с помощью данных, полученных гироскопом после преобразования в систему координат V. Данные обычно представляют собой интеграл изменения фазового угла. При использовании нескольких гироскопов данные могут иметь векторную форму. В одном варианте осуществления изобретения использованы два гироскопа и измерения можно провести на уровне обода с угловым интервалом около 90°.
Угол сдвига фаз вращающегося узла можно оценить множеством способов. Этот фазовый угол используется для образования матрицы направлений с помощью уравнения (2). Здесь приведено подробное описание двух примеров.
с помощью уравнения (2). Здесь приведено подробное описание двух примеров.
Первый пример:
Предположим, что получен результат измерения стационарным датчиком ускорения или магнитометром (как правило, движение с ускорением отсутствует). Этот результат измерения непосредственно описывает верхнее направление (ускорение можно принимать как погрешность). Если допустить, что ось вращения вращающегося узла является горизонтальной, можно оценить матрицу направляющих косинусов нормализацией показаний акселерометра и подставлением полученных значений m1 и m2 (два датчика ускорения обозначены цифрами 1 и 2) в уравнение:

где
m1 - показания первого акселерометра, и
m2 - показания второго акселерометра.
Датчики ускорения или магнитометры, как правило, устанавливаются на одной оси (одних и тех же осях) с гироскопами.
Следует понимать, что измерения следует проводить с достаточной частотой, чтобы в значительной мере исключить постоянное смещение гироскопов. Другими словами, после полного оборота (360°) вращающегося узла измерительные сигналы обнуляют постоянные члены, сумма значений m1 при полном обороте очень близка к нулю, сумма значений m2 при полном обороте также очень близка к нулю.
Второй пример:
Оценивают или определяют момент завершения полного оборота, и по меньшей мере с одного гироскопа собираются данные (угловые скорости) относительно одного оборота. Данные первого гироскопа умножаются на ряд синусов, а данные второго гироскопа умножаются на ряд косинусов, причем оба ряда выбираются таким образом, чтобы обеспечить максимально точное представление рядов значений акселерометра m1 и m2 (см. предыдущий пример), и чтобы сумма ряда была равна нулю с максимально возможной точностью. Тем самым исключается постоянное смещение гироскопа (по меньшей мере, частично). Подходящие ряды синусов и косинусов могут заранее задаваться с помощью моделирования и заранее сводиться в таблицы.
Так объясняется оценка момента времени завершения полного оборота на 360°.
Простым методом, подходящим для медленно движущихся транспортных средств, является следование за сигналами ускорения и определение пересечений с нулем: в случае использования двух датчиков ускорения направление можно определить посредством наблюдения за тем, который из них пересечет нуль первым. Кроме того, каждое пересечение с нулем (от отрицательной до положительной точки, например) принимается как полный оборот вращающегося узла.
Если транспортное средство движется быстрее, для оценки углов можно применять фильтр, подходящий для оценки состояния с помощью наблюдения при учете шумов, например, фильтр Кальмана. Фильтр Кальмана можно использовать для уточнения оценки угла вращающегося узла, чтобы таким образом упростить оценку пересечений нуля.
Вместо акселерометров или магнитометров можно использовать простое реле или магнит в сочетании с тормозным диском или колодкой, или аналогичное счетное устройство для определения полного оборота на 360°, и в этом случае ряды синусов и косинусов могут быть равными длине данных гироскопа, полученных в течение периода полного оборота.
После преобразования данных гироскопа в точки системы координат V можно применять традиционные алгоритмы точного расчета.
Следует понимать, что при использовании магнитометра эффективным может стать создание магнитного поля вокруг используемого вращающегося узла с помощью магнита, закрепляемого на невращающемся узле транспортного средства.
Вариант осуществления изобретения заканчивается блоком 306. Вариант осуществления изобретения можно повторять различными способами. Один пример показан стрелкой 308 на рис. 3.
Шаги/пункты, сигнальные сообщения и соответствующие функции, описанные выше на рис. 3 приведены не в абсолютном хронологическом порядке, некоторые шаги/пункты могут выполняться одновременно или в порядке, отличающемся от приведенного. Прочие функции могут также выполняться между шагами/пунктами или в пределах шагов/пунктов, а прочие сигнальные сообщения могут передаваться между приведенными на иллюстрации сообщениями. Некоторые шаги/пункты, или часть шагов/пунктов, также могут исключаться или заменяться соответствующими шагами/пунктами или частью шагов/пунктов.
Описанные ниже технологии могут быть реализованы различными способами. Например, эти технологии могут быть применены с помощью аппаратного обеспечения (одно или несколько устройств), встроенного программного обеспечения (одно или несколько устройств), программного обеспечения (один или несколько модулей), или их комбинации. В качестве компьютерной программы или программного продукта может быть применен метод, описанный на рис. 3.
При аппаратном применении устройство, использующее метод, описанный на рис. 3, может быть реализовано в одной или нескольких специализированных интегральных схемах (ASIC), цифровых сигнальных процессорах (ЦСП), устройствах цифровой обработки сигналов (УЦОС), программируемых логических устройствах (ПЛУ), программируемых пользователем вентильных матрицах (ППВМ), процессорах, контроллерах, микроконтроллерах, микропроцессорах, платах с цифровым управлением, прочих электронных устройствах предназначенных для выполнения функций, описанных в заявке, или их комбинации. Для встроенных программ или программного обеспечения реализация может быть осуществлена с помощью модулей по меньшей мере одного набора микросхем (напр., процедуры, функции и т.д.), выполняющих описанные функции. Программные коды могут храниться в запоминающем устройстве и исполняться процессорами. Запоминающее устройство может быть реализовано внутри процессора или извне процессора. В последнем случае оно может быть соединено с процессором различными средствами, известными в данной области техники. Кроме того, элементы системы, описанные в заявке, могут быть перегруппированы и/или дополнены дополнительными компонентами для выполнения различных задач и т.п., описанных в их отношении, и они не ограничиваются точными конфигурациями, приведенными на представленных рисунках, как понятно специалисту в данной области техники.
Человеку, сведущему в данной области техники, будет очевидно, что по мере развития технологий концепция изобретения может быть реализована различными путями. Изобретение и варианты его осуществления не ограничиваются описанными выше примерами, но могут различаться в рамках объема заявки.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ РАБОЧЕГО ОРГАНА МАШИНЫ | 2014 |
|
RU2566153C1 |
| СПОСОБ ОБНОВЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОЙ МАШИНЫ, ОСНОВАННЫЙ НА ДЕВЯТИОСЕВОМ ДАТЧИКЕ НА ОСНОВЕ МЭМС | 2016 |
|
RU2662460C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ВЕДЕНИЯ ДИАЛОГОВ С ВИРТУАЛЬНЫМИ ПЕРСОНАЖАМИ В ВИРТУАЛЬНОЙ СРЕДЕ | 2020 |
|
RU2747861C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ КУРСА И УГЛОВОГО ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ, ВЫПОЛНЕННАЯ С ВОЗМОЖНОСТЬЮ ФУНКЦИОНИРОВАНИЯ В ПОЛЯРНОЙ ОБЛАСТИ | 2018 |
|
RU2762143C2 |
| Комплект носимой аппаратуры топогеодезической привязки и формирования целеуказаний | 2017 |
|
RU2661676C1 |
| КОМПЛЕКТ ЛАБОРАТОРНОГО ОБОРУДОВАНИЯ ДЛЯ ИЗУЧЕНИЯ ИЗБЫТОЧНОГО БЛОКА ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ МОДУЛЕЙ | 2024 |
|
RU2817519C1 |
| Способ автономной ориентации подвижного объекта с помощью инерциального измерительного модуля | 2019 |
|
RU2738342C1 |
| СПОСОБ ОБРАБОТКИ ИНФОРМАЦИИ О ПЕРЕМЕЩЕНИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2436047C1 |
| ИНЕРЦИАЛЬНОЕ УСТРОЙСТВО И СПОСОБЫ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ЭЛЕКТРОННЫМИ СИСТЕМАМИ | 2015 |
|
RU2648938C2 |
| Способ трекинга гибкого хирургического инструмента на основе инерциальных МЭМС датчиков | 2021 |
|
RU2767174C1 |
Группа изобретений относится к средствам для определения положения объектов в заданной системе координат. Инерциальный блок для закрепления на вращающемся узле транспортного средства, сочлененный с его силовым оборудованием, содержит по меньшей мере один датчик ускорения, и/или по меньшей мере один магнитометр, выполненный с возможностью определения угла наклона вращающегося узла, и/или по меньшей мере одно счетное устройство, выполненное с возможностью определения количества вращений вращающегося узла, и два гироскопа, выполненные с возможностью определения направления на уровне обода вращающегося узла в целях предоставления информации об углах для определения положения, при этом данные первого гироскопа умножаются на ряд синусов, а данные второго гироскопа умножаются на ряд косинусов, причем оба ряда выбираются таким образом, чтобы обеспечить максимально точное представление рядов значений акселерометра, и чтобы сумма ряда была равна нулю с максимально возможной точностью. Также предложено устройство, содержащее множество инерциальных датчиков, которое крепится к транспортному средству. Указанный инерциальный блок реализует соответствующий способ определения координат транспортного средства. Описанная выше группа изобретений позволяет с высокой точностью определять координаты транспортных средств. 3 н. и 24 з.п. ф-лы, 5 ил.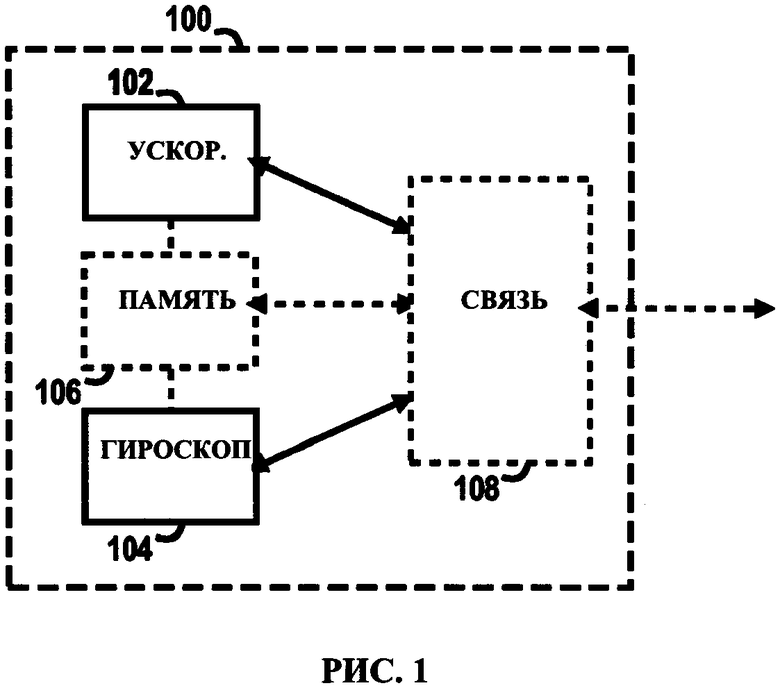
1. Инерциальный блок для закрепления на вращающемся узле транспортного средства, где вращающийся узел сочленен с силовым оборудованием транспортного средства, содержащий:
по меньшей мере один датчик ускорения и/или по меньшей мере один магнитометр, выполненный с возможностью определения угла наклона вращающегося узла, и/или
по меньшей мере одно счетное устройство, выполненное с возможностью определения количества вращений вращающегося узла, и
два гироскопа, выполненные с возможностью определения направления на уровне обода вращающегося узла в целях предоставления информации об углах для определения положения, при этом данные первого гироскопа умножаются на ряд синусов, а данные второго гироскопа умножаются на ряд косинусов, причем оба ряда выбираются таким образом, чтобы обеспечить максимально точное представление рядов значений акселерометра, и чтобы сумма ряда была равна нулю с максимально возможной точностью.
2. Инерциальный блок по п. 1, в котором счетное устройство содержит тормозной диск или тормозную колодку и магнит или реле для подсчета числа полных оборотов.
3. Инерциальный блок по п. 1 или 2, дополнительно содержащий электрический генератор для получения энергии от вращения вращающегося узла.
4. Инерциальный блок по п. 1 или 2, в котором устройство содержит два гироскопа с угловым интервалом около 90°.
5. Инерциальный блок по п. 1, в котором момент завершения полного оборота оценивается или определяется и данные относительно одного оборота собираются по меньшей мере с одного гироскопа.
6. Инерциальный блок по п. 1, в котором инерциальный блок предназначен для определения положения транспортного средства.
7. Инерциальный блок по п. 1 или 6, в котором инерциальный блок предназначен для определения положения транспортного средства путем использования преобразования системы координат.
8. Инерциальный блок по п. 1 или 6, в котором по меньшей мере один гироскоп выполнен с возможностью определения направления в системе координат на уровне обода вращающегося узла.
9. Инерциальный блок по п. 1 или 5, в котором полные обороты на 360° вращающегося узла определяются для компенсации смещения гироскопа.
10. Устройство для закрепления на вращающемся узле транспортного средства, где вращающийся узел сочленен с силовым оборудованием транспортного средства, содержащее:
по меньшей мере один датчик ускорения и/или по меньшей мере один магнитометр, выполненный с возможностью определения угла наклона вращающегося узла, и/или
по меньшей мере одно счетное устройство, выполненное с возможностью определения количества вращений вращающегося узла, и
два гироскопа, выполненные с возможностью определения направления на уровне обода вращающегося узла в целях предоставления информации об углах для определения положения, при этом данные первого гироскопа умножаются на ряд синусов, а данные второго гироскопа умножаются на ряд косинусов, причем оба ряда выбираются таким образом, чтобы обеспечить максимально точное представление рядов значений акселерометра, и чтобы сумма ряда была равна нулю с максимально возможной точностью, и
средство обработки данных, содержащих информацию об определенном угле наклона и/или определенном количестве оборотов и углах, путем использования данных об угле наклона и/или определенном количестве оборотов для преобразования по меньшей мере одной системы координат и путем использования вращения вращающегося узла для компенсации смещения гироскопа в целях компенсации неточности угловых характеристик.
11. Устройство по п. 10, в котором устройство содержит два гироскопа с угловым интервалом около 90°.
12. Устройство по п. 10, в котором угол сдвига фаз, пройденное расстояние и/или пройденное расстояние за определенный промежуток времени оцениваются путем обработки данных.
13. Устройство по п. 12, в котором обработка данных содержит обновление информации о местоположении транспортного средства путем использования изменения пройденного расстояния за определенный промежуток времени относительно выбранных осей, перенесенных на выбранную систему координат.
14. Устройство по любому из пп. 10-13, в котором момент завершения полного оборота оценивается или определяется, и данные в отношении одного оборота собираются по меньшей мере с одного гироскопа.
15. Устройство по п. 10, в котором устройство предназначено для определения местоположения транспортного средства.
16. Устройство по п. 15, в котором устройство предназначено для определения местоположения транспортного средства путем использования преобразования системы координат.
17. Устройство по п. 10, 15 или 16, в котором по меньшей мере один гироскоп предназначен для определения направления в системе координат на уровне обода вращающегося узла.
18. Устройство по п. 10, 15 или 16, в котором по меньшей мере одно преобразование системы координат выполняется на основе угловых характеристик и угла наклона и/или определенного количества оборотов.
19. Устройство по п. 14, в котором полные обороты на 360° вращающегося узла определяются для компенсации смещения гироскопа.
20. Способ определения местоположения транспортного средства, содержащий:
получение данных об угле наклона вращающегося узла транспортного средства и/или
получение данных о количестве оборотов,
получение данных об угле наклона вращающегося узла транспортного средства, и
получение данных об угловых характеристиках при помощи двух гироскопов так, что при этом данные первого гироскопа умножаются на ряд синусов, а данные второго гироскопа умножаются на ряд косинусов, причем оба ряда выбираются таким образом, чтобы обеспечить максимально точное представление рядов значений акселерометра, и чтобы сумма ряда была равна нулю с максимально возможной точностью, и
обработку данных путем использования угла наклона и/или определенного количества оборотов для преобразования по меньшей мере одной системы координат и путем использования вращения вращающегося узла для компенсации смещения гироскопа в целях компенсации неточности угловых характеристик.
21. Способ по п. 20, в котором угол сдвига фаз, пройденное расстояние и/или пройденное расстояние за определенный промежуток времени оценивают путем обработки данных.
22. Способ по п. 20, в котором обработка данных содержит обновление информации о местоположении транспортного средства путем использования изменения пройденного расстояния за определенный промежуток времени относительно выбранных осей, перенесенных в выбранную систему координат.
23. Способ по п. 20, в котором момент завершения полного оборота оценивают или определяют и данные в отношении одного оборота собирают по меньшей мере с одного гироскопа.
24. Способ по п. 20, в котором способ содержит определение местоположения транспортного средства с помощью преобразования системы координат.
25. Способ по п. 20 или 24, в котором угловые характеристики получают гироскопом, выполненным с возможностью определения направления в системе координат на уровне обода вращающегося узла.
26. Способ по п. 20 или 24, в котором выполняют преобразование по меньшей мере одной системы координат на основе угловых характеристик и угла наклона и/или определенного количества оборотов.
27. Способ по п. 20 или 23, в котором полные обороты на 360° вращающегося узла определяют для компенсации смещения гироскопа.
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| US 7100289 B1, 05.09.2006 | |||
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Устройство для контроля качества термической обработки стальных изделий | 1956 |
|
SU109596A1 |
| RU 2004135713 A1, 20.05.2006 | |||
| US 6412346 B2, 02.07.2002 | |||
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |

