Изобретение относится к области навигации, а именно к способам позиционирования автономных наземных транспортных средств (АТС), в том числе мобильных роботов.
В настоящее время АТС, в том числе робототехнические системы, находят все более широкое применение для выполнения различного рода операций в производственных и складских помещениях для автоматизации технологических процессов в различных отраслях производства, а также на опасных производствах, где нежелательно или недопустимо присутствие человека.
Основным требованием, предъявляемым к АТС, является точное определение собственного положения в пространстве, для чего автономные транспортные средства содержат в своем составе бортовые датчики, среди которых выделяются навигационная спутниковая система (например, GPS, ГЛОНАСС, и т.д.), одометрия, инерциальная навигационная система (ИНС), включающая в себя акселерометры, гироскопы и. т. д.
Особенности эксплуатации АТС (условия окружающей среды) и технические особенности работы бортовых датчиков определяют ошибки измерений параметров местоположения и углового положения АТС на местности, так спутниковый сигнал в условиях применения АТС в помещениях может приниматься неустойчиво и с помехами, одометрия имеет особенность накапливания ошибок измерений под воздействием внешних и внутренних помех, а также за счет проскальзывания колеса и его неровности, для ИНС главные недостатки − накопление ошибок измерения за время активной работы и снижение точности измерений в результате резкой и частой смены скорости объекта.
Таким образом, для точного позиционирования АТС целесообразно получать данные о его параметрах от нескольких разнородных бортовых датчиков с дальнейшим комплексированием полученной навигационной информацией, а также с возможностью варьирования степени влияния измерений каждого бортового датчика на определение местоположения и углового положения АТС в соответствии с условиями эксплуатации АТС и точностью измерений каждого бортового датчика в данных условиях.
Из данного уровня техники известны следующие технические решения.
Известен способ определения пространственного положения транспортного средства на базе GNSS-INS и инерциальной навигационной системы (патент RU 2662462). Данный способ включает в себя следующие этапы: установку антенны GNSS в центре масс и в центре транспортного средства и установку измерительного блока IMU датчика на основе MEMS на валу рулевого механизма транспортного средства; получение информации о положении и скорости транспортного средства с помощью антенны GNSS, получение информации о курсовой угловой скорости транспортного средства с помощью измерительного блока IMU; вычисление угла пространственного положения транспортного средства с помощью комбинации акселерометра и гироскопа; вычисление курсового угла транспортного средства на базе положения, скорости и курсовой угловой скорости транспортного средства. Посредством комбинации одиночной антенны GNSS и датчика на основе IMU/MEMS небольшой стоимости пространственное положение и направление могут быть определены на базе кинематической модели транспортного средства.
Данный способ предназначен для позиционирования сельскохозяйственного транспортного средства, как правило, функционирующего на открытой местности, что ограничивает возможности определения местоположения объекта в закрытом помещении, где сигнал GNSS принимается неустойчиво и с помехами, а указанный инерциальный набор датчиков не имеет возможности определения координат объекта и не обеспечивает достаточную точность позиционирования.
Известен способ позиционирования робота (CN110567458), при котором данные о пространственном положении робота получают от бортовых датчиков, представленных в виде инерциальных датчиков, датчика позиционирования GPS, датчика зрения, лидарного датчика, энкодеров, датчика на основе технологии UWB.
Затем получают информацию о условиях окружающей среды, в которой функционирует робот (помещение/открытая среда, освещение, гладкость поверхности пола), и для каждого бортового датчика определяют весовой коэффициент, характеризующий точность измерений в данных условиях, после чего выбирают из представленных бортовых датчиков по весовым коэффициентам наиболее приоритетные по точности измерений и в соответствии с выбранным алгоритмом позиционирования (в предпочтительном варианте, расширенный алгоритм Калмана) обрабатывают показания от выбранных приоритетных бортовых датчиков.
В данном способе для позиционирования робота применяют набор разнородных бортовых датчиков, характеризующихся высокой стоимостью и сложностью алгоритмов обработки выходных сигналов, при этом указанные датчики собирают информацию об окружающей среде, на основании которой определяют приоритетные датчики для определения пространственного положения робота, что увеличивает вычислительную сложность алгоритма и как следствие снижает скорость его выполнения.
Известен способ определения навигационного состояния наземного транспортного средства (в том числе автономного транспортного средства) (US2009319186), при котором получают данные об угле поворота от энкодера, связанного с поворотным колесом транспортного средства, получают информацию о продольных угловых скоростях колес от датчиков скорости, установленных на данных колесах транспортного средства, получают данные GPS-позиционирования от GPS-приемника, установленного на транспортном средстве, определяют скорость рыскания для транспортного средства на основе информации о продольных угловых скоростях колес, угле поворота и данных позиционирования GPS, производят интегрирование скорости рыскания для определения курса транспортного средства.
Набор бортовых датчиков, заявленный в данном способе для получения навигационных данных, не обеспечивает высокой точности позиционирования транспортного средства, так поступление данных от GPS-приемника зависят от условий приема, местоположения приемной антенны по отношению к строениям и деревьям, а в закрытых помещениях принимается неустойчиво и с помехами, а на точность измерений датчиков, устанавливаемых на колесах транспортного средства, влияют характеристики дорожного покрытия.
Известен способ спутникового определения местоположения транспортного средства с использованием датчика движения и положения (WO2019179844), который включает в себя прием спутниковых данных GNSS, прием данных о скорости вращения колес транспортного средства и угле рулевого управления от датчиков транспортного средства, а также данных коррекции GNSS или данных инерциальных датчиков, прием дополнительных данных, позволяющих сделать выводы о качестве и/или точности определения позиции транспортного средства, поддерживаемой спутниковой навигационной системой. Такими данными могут быть данные о погоде, давлении в шинах колес, уровне скольжения колес, мобильной связи.
Данные о транспортном средстве, полученные на указанных шагах, поступают на датчик движения и положения, где осуществляется определение пространственного положения транспортного средства.
В представленном способе дополнительные данные о условиях окружающей среды получают в процессе определения местоположения транспортного средства для установления приоритета по точности измерений используемых бортовых датчиков, что усложняет работу алгоритма и снижает скорость обработки навигационной информации. К тому же, в способе не указано, как реализуется возможность независимой оценки скорости и углового положения транспортного средства по показаниям от нескольких разнородных бортовых датчиков.
Способ, раскрытый в источнике WO2019179844, является наиболее близким по технической сущности к заявляемому изобретению и может выступать в качестве прототипа.
Задачей, на решение которой направлено заявленное изобретение, является создание способа, позволяющего с высокой точностью определять пространственное положение наземного АТС при различных условиях его эксплуатации за счет комплексирования различных навигационных данных, получаемых от разнородных бортовых датчиков с возможностью регулирования степени влияния каждого бортового датчика − источника навигационной информации− на оценку пространственного положения в соответствии с условиями эксплуатации АТС.
Технический результат заявленного изобретения заключается в повышение точности определения положения наземного транспортного средства в пространстве при обеспечении стабильности позиционирования транспортного средства в различных условиях эксплуатации.
Технический результат заявленного изобретения достигается при реализации способа комплексирования разнородной навигационной информации, получаемой от бортовых датчиков автономного наземного транспортного средства (АТС) с целью его позиционирования, отличающегося тем, что данные о скорости движения АТС получают от энкодеров относительного или абсолютного типа, устанавливаемых на колесах АТС, и GNSS приемника, данные об угле поворота АТС вокруг вертикальной оси получают от энкодера, устанавливаемого на рулевой рейке АТС, и инерциальной навигационной системы, при этом в случае использования относительного колесного энкодера, показания о направлении движения АТС получают от энкодера вращения, размещаемого на валу двигателя АТС, производят конвертацию полученных данных от указанных бортовых датчиков в соответствующие единицы измерения скорости и угла поворота, определяют скорость движения АТС как сумму значений скоростей, полученных по показаниям колесных энкодеров и GNSS приемника с учетом весового коэффициента, предназначенного для регулирования степени влияния показаний указанных бортовых датчиков на оценку скорости движения АТС, затем определяют расчетный угол поворота АТС вокруг вертикальной оси по углу рулевой рейки с учетом значения скорости АТС, определенного на основе показаний колесных энкодеров и GNSS приемника, определяют относительные повороты АТС вокруг вертикальной оси по показаниям инерциальной навигационной системы и энкодера рулевой рейки как разность между предыдущими и текущими показаниями соответствующих бортовых датчиков, определяют угол поворота АТС вокруг вертикальной оси как сумму значений относительных поворотов по показаниям энкодера рулевой рейки и инерциальной навигационной системы с учетом весового коэффициента, предназначенного для регулирования степени влияния показаний указанных бортовых датчиков на оценку угла поворота АТС, полученные данные об угле поворота АТС вокруг вертикальной оси и скорости АТС комплексируют с помощью кинематической модели АТС, в результате чего определяют координаты и курс АТС.
Осуществление этапов предлагаемого способа, заключающихся в получении разнородной навигационной информации от разнородных бортовых датчиков АТС, независимом определении на ее основе скорости движения АТС и его углового положения вокруг вертикальной оси с возможностью настройки степени влияния каждого источника навигационной информации на оценку позиционирования АТС в соответствии с условиями среды эксплуатации, позволяет учитывать технические особенности работы бортовых датчиков в составе АТС при различных условиях окружающей среды, в результате чего обеспечивается настройка системы позиционирования АТС под заданные условия его эксплуатации, что приводит к повышению точности определения положения наземного транспортного средства в пространстве при обеспечении стабильности позиционирования транспортного средства в различных условиях эксплуатации.
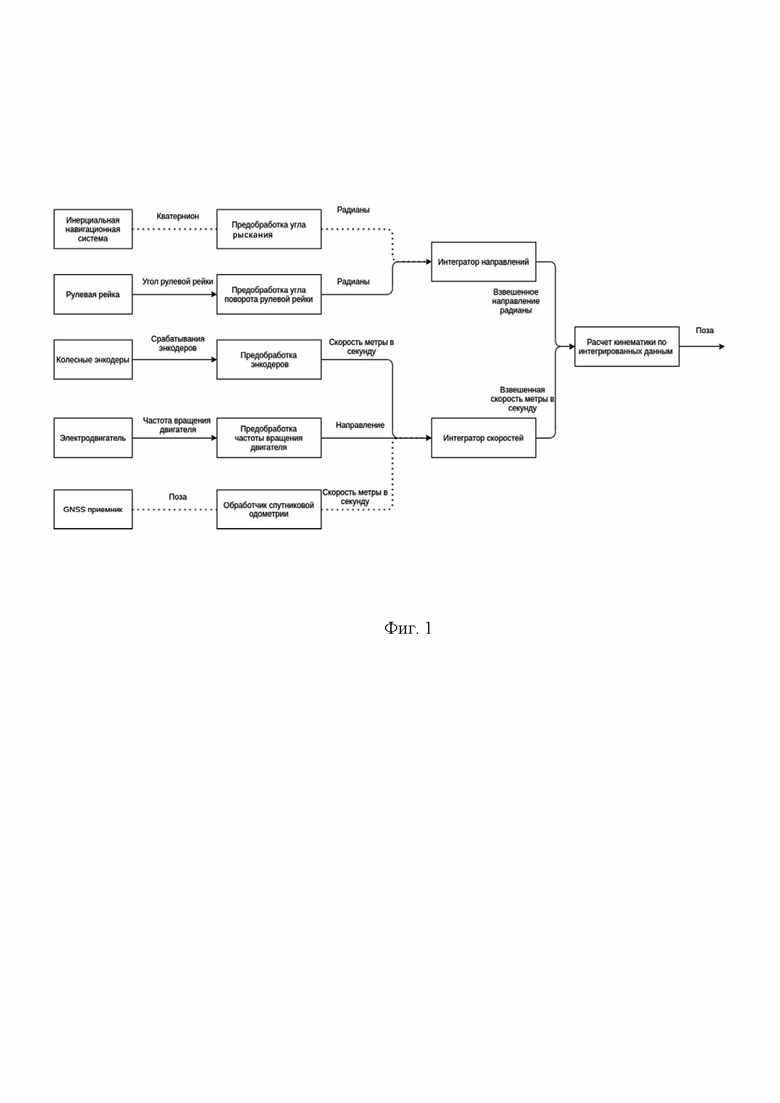
На фиг. 1 представлена схема последовательности осуществления способа комплексирования разнородной навигационной информации для позиционирования наземного транспортного средства.
Способ реализуется следующим образом.
Способ комплексирования разнородной навигационной информации для позиционирования автономного наземного транспортного средства (фиг. 1) предназначен для точного определения положения в пространстве (на плоскости) наземного транспортного средства. Положение, состоящее из координат и ориентации (угол курса), определяется в относительной системе координат, связанной с начальным положением транспортного средства, что обеспечивает гладкость траектории.
Положение в пространстве АТС, в том числе колесных и гусеничных роботов, определяется путем комплексирования различных навигационных данных, полученных от разнородных бортовых датчиков, при этом независимо оценивают скорость движения транспортного средства и его курс.
Данные о скорости движения транспортного средства получают от энкодеров, устанавливаемых на колесах транспортного средства, и от GNSS приемника.
Так как в реальной системе позиционирования АТС применяются относительные энкодеры, которые учитывают только разницу между измерениями, и не позволяют определять направление движения АТС, то дополнительно на валу двигателя АТС может быть расположен энкодер вращения, позволяющий определять частоту вращения и направление тягового вала двигателя, и, следовательно, оценивать текущее направление движения АТС.
В случае применения абсолютных энкодеров, позволяющих оценивать направление движения АТС, использование энкодера вращения на валу двигателя не обязательно.
Данные об угле поворота транспортного средства вокруг вертикальной оси получают от энкодера, устанавливаемого на рулевой рейке транспортного средства, и от инерциальной навигационной системы.
Затем производят конвертацию полученных данных от указанных бортовых датчиков в соответствующие единицы измерения скорости и угла поворота: информацию о скорости движения конвертируют в м/c, информацию об угле поворота - в радианы, после чего указанные данные подвергаются обработке экспоненциальным фильтром.
Скорость движения транспортного средства определяют как сумму значений скоростей, полученных по показаниям колесных энкодеров и GNSS приемника с учетом весового коэффициента, предназначенного для изменения степени влияния показаний указанных бортовых датчиков на оценку скорости движения транспортного средства:

где  - значение суммарной скорости по показаниям GNSS приемника и колесных энкодеров,
- значение суммарной скорости по показаниям GNSS приемника и колесных энкодеров,  - значение скорости, полученное по показаниям колесных энкодеров,
- значение скорости, полученное по показаниям колесных энкодеров,  - значение скорости, полученное по показаниям GNSS приемника,
- значение скорости, полученное по показаниям GNSS приемника,  - весовой коэффициент, предназначенный для изменения степени влияния показаний GNSS приемника и колесных энкодеров на результат значения скорости .
- весовой коэффициент, предназначенный для изменения степени влияния показаний GNSS приемника и колесных энкодеров на результат значения скорости .
Затем рассчитывают угол поворота транспортного средства вокруг вертикальной оси по углу рулевой рейки с учетом значение суммарной скорости :
где  - ширина колесной базы, м;
- ширина колесной базы, м;
 - угол рулевой рейки, рад.
- угол рулевой рейки, рад.
Определяют относительный поворот АТС вокруг вертикальной оси Z на основе показаний инерциального сенсора  и относительный поворот АТС вокруг вертикальной оси Z на основе показаний энкодера рулевой рейки
и относительный поворот АТС вокруг вертикальной оси Z на основе показаний энкодера рулевой рейки  как разность между предыдущими и текущими показаниями соответствующих бортовых датчиков:
как разность между предыдущими и текущими показаниями соответствующих бортовых датчиков:


где - разница между текущим значением угла поворота относительно оси Z  и предыдущим значением
и предыдущим значением  по показаниям инерциального сенсора, - разница между текущим значение угла поворота относительно оси Z
по показаниям инерциального сенсора, - разница между текущим значение угла поворота относительно оси Z  и предыдущим значением
и предыдущим значением  по показаниям энкодера рулевой рейки.
по показаниям энкодера рулевой рейки.
Определяют значение суммарной величины угла поворота вокруг вертикальной оси Z по показаниям энкодера рулевой рейки и инерциальной навигационной системы как сумму значений относительных поворотов и с учетом весового коэффициента, предназначенного для изменения степени влияния указанных бортовых датчиков на оценку угла поворота транспортного средства вокруг вертикальной оси:

где  - значение суммарной величины угла поворота по показаниям энкодера рулевой рейки и инерциальной навигационной системы,
- значение суммарной величины угла поворота по показаниям энкодера рулевой рейки и инерциальной навигационной системы,  - весовой коэффициент, предназначенный для изменения степени влияния показаний энкодера рулевой рейки и инерциальной навигационной системы.
- весовой коэффициент, предназначенный для изменения степени влияния показаний энкодера рулевой рейки и инерциальной навигационной системы.
Настойка весового коэффициента, характеризующего степень «доверия» к каждому бортовому датчику - источнику навигационной информации - производится в зависимости от заданных условий окружающей среды и плана работы АТС (изменение скорости в течение времени работы, частота смены направлений, время работы), в которой функционирует АТС.
Так, в случае пропадания сигнала от GNSS или его ошибки, которое возможно, например, в тоннелях, лесах, гаражах, закрытых помещениях, приоритетным бортовым датчиком для определения скорости является колесный энкодер, обеспечивая при этом непрерывность и стабильность процесса локализации АТС.
В случае продолжительного времени функционирования АТС, гироскоп в составе инерциальной навигационной системы, может накопить достаточно большую ошибку и не обеспечить требуемую точность измерения углового положения, поэтому приоритет по точности измерений будет иметь энкодер рулевой рейки.
Основным фактором, влияющим на точность измерения колесных энкодеров, является тип поверхности дорожного покрытия, в соответствии с чем подбирается весовой коэффициент для данного бортового датчика. Весовые коэффициенты , принимают значения в диапазоне от 0 до 1.
Возможны следующие пограничные случаи значений весовых коэффициентов :
- =0 - значение скорости оценивается только по показаниям колесных энкодеров;
- =1 - значение скорости оценивается только по показаниям GNSS;
- =0.5 - значение скорости оценивается как среднее арифметическое между показаниями колесных энкодеров и GNSS.
Допустимы также любые промежуточные значения коэффициента в зависимости от определенной априорно, например, в результате экспериментов, точности источников - колесных энкодеров и GNSS.
Возможны следующие пограничные случаи значений весовых коэффициентов :
- =0 - значение угла поворота оценивается только по показаниям энкодера рулевой рейки;
- =1 - значение угла поворота АТС оценивается только по показаниям инерциальной навигационной системы;
-=0.5 - значение угла поворота оценивается как среднее арифметическое между показаниями энкодера рулевой рейки и инерциальной навигационной системы.
Допустимы также любые промежуточные значения коэффициента в зависимости от определенной априорно, например, в результате экспериментов, точности источников - энкодера рулевой рейки и инерциальной навигационной системы.
Для определения местоположения и курсового угла АТС угол поворота и скорость комплексируют с помощью кинематической модели транспортного средства, в результате чего определяют координаты и курс транспортного средства:



где  - курсовой угол транспортного средства, рад;
- курсовой угол транспортного средства, рад;
 - время, прошедшее с предыдущего расчета;
- время, прошедшее с предыдущего расчета;
( ) - начальные координаты АТС;
) - начальные координаты АТС;
( ) - оценка координат АТС.
) - оценка координат АТС.
Таким образом, в результате реализации способа комплексирования разнородной навигационной информации для позиционирования наземного транспортного средства, при сформированном наборе бортовых датчиков, входящих в состав АТС, обеспечивается повышенная точность локализации АТС в различных условиях его эксплуатации при надежности и стабильности осуществления процесса навигации и как следствие безопасности эксплуатации АТС.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения траектории объекта в окружающем пространстве для построения 3D карты | 2024 |
|
RU2830723C1 |
| Способ позиционирования наземного транспортного средства | 2021 |
|
RU2769918C1 |
| СПОСОБ КАЛИБРОВКИ СЕНСОРОВ КОЛЕСНОЙ ОДОМЕТРИИ | 2023 |
|
RU2821391C1 |
| Способ для адаптивного управления характеристиками движения высокоавтоматизированного транспортного средства в зависимости от уровня неопределенности в оценке окружающей ситуации | 2021 |
|
RU2783780C1 |
| СПОСОБ ВИЗУАЛЬНОЙ ЛОКАЛИЗАЦИИ ГОРОДСКОГО РЕЛЬСОВОГО ТРАНСПОРТА НА ОСНОВЕ ФИЛЬТРОВ ЧАСТИЦ КАЛМАНА И ДАННЫХ О КАРТИРОВАНИИ | 2023 |
|
RU2807978C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЕСПИЛОТНЫХ ТРАНСПОРТНЫХ СРЕДСТВ С ЭЛЕКТРОПРИВОДОМ | 2022 |
|
RU2789153C1 |
| Способ навигации с использованием высокоточного абонентского терминала и высокоточный абонентский терминал | 2023 |
|
RU2832572C1 |
| Бортовое устройство позиционирования рельсового транспортного средства | 2023 |
|
RU2799734C1 |
| Способ навигации с интеграцией систем и средств обеспечения сквозного позиционирования повышенной точности и устойчивости к помехам | 2023 |
|
RU2836625C1 |
| УСТРОЙСТВО И СПОСОБ ТРЕХМЕРНОГО ПОЗИЦИОНИРОВАНИЯ | 2011 |
|
RU2510046C2 |
Изобретение относится к области навигации, а именно к способам позиционирования автономных наземных транспортных средств (АТС), в том числе мобильных роботов. Способ комплексирования разнородной навигационной информации, получаемой от бортовых датчиков автономного наземного транспортного средства (АТС) с целью его позиционирования, отличается тем, что данные о скорости движения АТС получают от энкодеров относительного или абсолютного типа, устанавливаемых на колесах АТС, и GNSS приемника, данные об угле поворота АТС вокруг вертикальной оси получают от энкодера, устанавливаемого на рулевой рейке АТС, и инерциальной навигационной системы, при этом в случае использования относительного колесного энкодера показания о направлении движения АТС получают от энкодера вращения, размещаемого на валу двигателя АТС. Далее производят конвертацию полученных данных от указанных бортовых датчиков в соответствующие единицы измерения скорости и угла поворота, определяют скорость движения АТС как сумму значений скоростей, полученных по показаниям колесных энкодеров и GNSS приемника с учетом весового коэффициента, предназначенного для регулирования степени влияния показаний указанных бортовых датчиков на оценку скорости движения АТС. Затем определяют расчетный угол поворота АТС вокруг вертикальной оси по углу рулевой рейки с учетом значения скорости АТС, определенного на основе показаний колесных энкодеров и GNSS приемника, определяют относительные повороты АТС вокруг вертикальной оси по показаниям инерциальной навигационной системы и энкодера рулевой рейки как разность между предыдущими и текущими показаниями соответствующих бортовых датчиков, определяют угол поворота АТС вокруг вертикальной оси как сумму значений относительных поворотов по показаниям энкодера рулевой рейки и инерциальной навигационной системы с учетом весового коэффициента, предназначенного для регулирования степени влияния показаний указанных бортовых датчиков на оценку угла поворота АТС, полученные данные об угле поворота АТС вокруг вертикальной оси и скорости АТС комплексируют с помощью кинематической модели АТС, в результате чего определяют координаты и курс АТС. Технический результат – повышение точности определения положения автономного наземного транспортного средства в пространстве при обеспечении стабильности позиционирования АТС в различных условиях эксплуатации. 1 ил.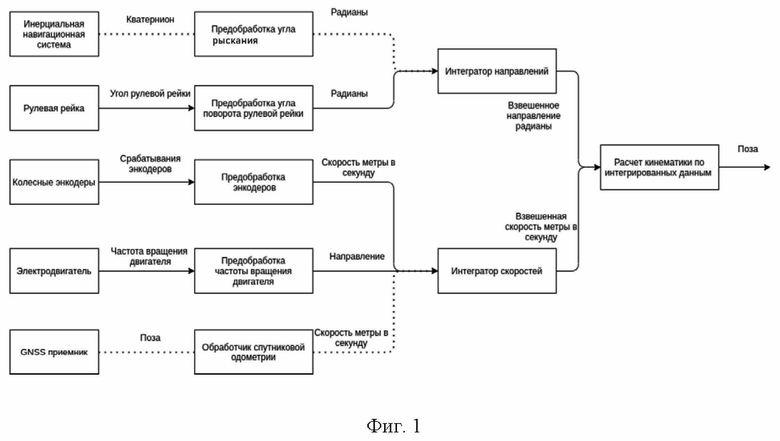
Способ комплексирования разнородной навигационной информации, получаемой от бортовых датчиков автономного наземного транспортного средства (АТС) с целью его позиционирования, отличающийся тем, что данные о скорости движения АТС получают от энкодеров относительного или абсолютного типа, устанавливаемых на колесах АТС, и GNSS приемника, данные об угле поворота АТС вокруг вертикальной оси получают от энкодера, устанавливаемого на рулевой рейке АТС, и инерциальной навигационной системы, при этом в случае использования относительного колесного энкодера показания о направлении движения АТС получают от энкодера вращения, размещаемого на валу двигателя АТС, производят конвертацию полученных данных от указанных бортовых датчиков в соответствующие единицы измерения скорости и угла поворота, определяют скорость движения АТС как сумму значений скоростей, полученных по показаниям колесных энкодеров и GNSS приемника с учетом весового коэффициента, предназначенного для регулирования степени влияния показаний указанных бортовых датчиков на оценку скорости движения АТС, затем определяют расчетный угол поворота АТС вокруг вертикальной оси по углу рулевой рейки с учетом значения скорости АТС, определенного на основе показаний колесных энкодеров и GNSS приемника, определяют относительные повороты АТС вокруг вертикальной оси по показаниям инерциальной навигационной системы и энкодера рулевой рейки как разность между предыдущими и текущими показаниями соответствующих бортовых датчиков, определяют угол поворота АТС вокруг вертикальной оси как сумму значений относительных поворотов по показаниям энкодера рулевой рейки и инерциальной навигационной системы с учетом весового коэффициента, предназначенного для регулирования степени влияния показаний указанных бортовых датчиков на оценку угла поворота АТС, полученные данные об угле поворота АТС вокруг вертикальной оси и скорости АТС комплексируют с помощью кинематической модели АТС, в результате чего определяют координаты и курс АТС.
| РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2014 |
|
RU2559194C1 |
| СПОСОБ И УСТРОЙСТВО БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИИ | 2018 |
|
RU2685767C1 |
| СПОСОБ КОМПЛЕКСИРОВАНИЯ БЕСПЛАТФОРМЕННЫХ ИНЕРЦИАЛЬНЫХ НАВИГАЦИОННЫХ СИСТЕМ | 2016 |
|
RU2634082C1 |
| US 7979172 B2, 12.07.2011. | |||

