Изобретение относится к области технической физики и может быть использовано для построения горизонтальной географической системы координат преимущественно на наземных подвижных объектах. позволяет определять углы наклонов на стоянке, курс объекта на стоянке и в движении.
Известен аналитический способ определения курса с помощью гироскопического датчика угловой скорости [1, с.193-196], в котором курс объекта вычисляется аналитически по информации о проекциях угловой скорости вращения Земли на ось чувствительности датчика угловой скорости.
Известна гироскопическая система [2], построенная на гироскопе с вертикальной ориентацией вектора кинетического момента, в которой используется аналитический способ определения курса объекта.
В известной гироскопической системе с аналитическим определением курса на двухосной платформе расположен гироскоп с вертикальной ориентацией вектора кинетического момента, два акселерометра и гиротахометр, измеряющий угловую скорость поворота платформы вокруг вертикального направления. В такой системе углы качек объекта вырабатываются физически, а курс объекта - аналитически по информации о проекциях угловой скорости вращения Земли на горизонтально ориентированные ортогональные оси чувствительности гироскопической системы совместно с информацией с гиротахометра, используемой для уменьшения динамических ошибок и повышения точности определения курса в условиях движения и маневрирования объекта.
Недостатком известного способа и известной гироскопической системы является пониженная точность аналитической выработки курса объекта при поворотах последнего по курсу, что для известной гироскопической системы связано с неидентичностью свойств гироскопа по ортогональным осям чувствительности, ошибками устройств управления, конечным качеством гиротахометра.
Известен способ определения курса объекта с помощью гироскопа направления [3, с.73-76], свободный от недостатков, указанных выше, в котором физически реализуется заданное направление для измерения курса объекта.
При организации работы гироскопа направления по двухрежимной схеме осуществляется предварительное приведение вектора кинетического момента к направлению, известным образом ориентированному относительно географического меридиана (например, приведение в плоскость меридиана), в режиме гирокомпаса с помощью цепи азимутальной коррекции. С помощью цепи горизонтальной коррекции вектор кинетического момента гироскопа направления удерживается в плоскости горизонта.
Известный способ определения угла курса с помощью гироскопа направления используется в гирогоризонткомпасе [4], содержащем трехстепенной гироскоп, установленный в двухосном кардановом подвесе, причем наружная ось его ориентирована по нормали к основанию объекта. Главная ось гироскопа перпендикулярна внутренней оси карданова подвеса. Параллельно главной оси гироскопа установлен датчик горизонта. Для предварительного приведения и удержания главной оси гироскопического чувствительного элемента в заданном направлении используется блок управления прецессионным движением гироскопа, а курс объекта в горизонтальной плоскости и углы наклона объекта в вертикальных плоскостях после приведения вектора кинетического момента к заданному направлению вычисляются в блоке выработки курса и углов качек объекта по известным аналитическим зависимостям.
Для вычисления курса объекта в горизонтальной плоскости после приведения вектора кинетического момента к заданному направлению используется информация о приборном курсе объекта в высотно-азимутальной системе координат гирогоризонткомпаса и наклонах самой системы координат в двух плоскостях, в одной из которых расположен вектор кинетического момента, а в другой - внутренняя ось карданова подвеса.
Приборный курс объекта в высотно-азимутальной системе координат и угол наклона объекта в плоскости, в которой расположен вектор кинетического момента гироскопа, определяются физически с помощью соответствующих датчиков углов, а угол наклона в плоскости, в которой расположена внутренняя ось карданова подвеса гирогоризонткомпаса, - аналитически с помощью дополнительного датчика горизонта, например акселерометра.
Недостатком известного способа определения угла курса и известного гирогоризонткомпаса является необходимость для определения курса объекта в горизонтальной плоскости использования дополнительного высоколинейного и высокоточного датчика угла наклона (акселерометра), установленного параллельно оси внутренней рамы карданова подвеса, что усложняет конструкцию и удорожает изготовление гироскопической системы.
Использование дополнительного датчика наклона, установленного параллельно оси внутренней рамы карданова подвеса, оправдано при необходимости определения углов наклона в динамике, например в задачах точного наведения и управления положением объекта в движении.
В ряде задач, решаемых гирогоризонткомпасом, не требуется определение углов наклона в движении.
В частности, при решении навигационных задач на движущемся наземном объекте после завершения процесса предварительного определения исходного азимута (гирокомпасирования) на стоянке гирогоризонткомпас работает в режиме гироазимута и выполняет функции гирокурсоуказателя. В этом случае акселерометр, необходимый для определения угла наклона высотно-азимутальной системы координат гирогоризонткомпаса в плоскости, в которой расположена внутренняя ось карданова подвеса, может отсутствовать, а возникающие в процессе движения при случайных наклонах объекта разнознаковые кардановые погрешности в результате решения навигационных алгоритмов значительно усредняются и не оказывают существенного влияния на точность определения курса объекта.
В то же время отсутствие дополнительного датчика наклона, определяющего наклон высотно-азимутальной системы координат гирогоризонткомпаса в плоскости, в которой расположена внутренняя ось карданова подвеса, значительно снижает точность определения курса (исходного азимута) при постоянном наклоне объекта, например в процессе гирокомпасирования на стоянке.
В качестве прототипа изобретения принят способ определения угла курса объекта с помощью гироскопа направления [3] и гирогоризонткомпас [4].
Изобретение направлено на повышение точности определения исходного курса объекта при его стоянке при одновременном упрощении конструкции и снижении стоимости изготовления гирогоризонткомпаса, способного работать в качестве хранителя направления.
Это достигается тем, что в известном способе определения угла курса гироскопом направления, содержащим гироскопический чувствительный элемент в двухосном кардановом подвесе с высотно-азимутальной ориентацией осей, причем наружная ось карданова подвеса связана с объектом, заключающимся в предварительном приведении главной оси гироскопического чувствительного элемента к заданному направлению, известным образом ориентированному относительно географического меридиана, измерении угла приборного курса объекта в высотно-азимутальной системе координат, измерении угла наклона объекта в плоскости, в которой расположена главная ось гироскопического чувствительного элемента, определении угла наклона объекта в плоскости, в которой расположена внутренняя ось карданова подвеса, вычислении по значениям углов приборного курса, наклона объекта в плоскости, в которой расположена главная ось гироскопического чувствительного элемента, и наклона объекта в плоскости, в которой расположена внутренняя ось карданова подвеса, угла курса объекта в плоскости горизонта, при этом определение угла наклона объекта в плоскости, в которой расположена внутренняя ось карданова подвеса, осуществляется на этапе предварительного приведения главной оси гироскопического чувствительного элемента к заданному направлению, при этом в процессе приведения замеряют не менее двух значений углов наклона в плоскостях с текущим расположением главной оси гироскопического чувствительного элемента и соответствующие смежным замерам углов наклона в плоскостях с текущим расположением главной оси гироскопического чувствительного элемента шаги изменения угла приборного курса гироскопа направления.
Для обеспечения определения с необходимой точностью угла курса объекта при малых начальных углах отклонения направления главной оси гироскопического чувствительного элемента от заданного направления по азимуту в предлагаемом способе осуществляется предварительный разворот главной оси гироскопического чувствительного элемента в азимуте на некоторый заданный угол.
Реализация предлагаемого способа определения угла курса осуществляется в самоориентирующейся гироскопической системе курсоуказания, содержащей гироплатформу в двухосном кардановом подвесе с датчиками углов поворота и моментными двигателями по осям подвеса, гироскопический чувствительный элемент с двумя измерительными осями, с датчиками углов и датчиками момента на каждой из измерительных осей, причем главная ось гироскопического чувствительного элемента перпендикулярна внутренней оси подвеса, усилители стабилизации, входы которых соединены с соответствующими датчиками углов гироскопического чувствительного элемента, а выходы с моментными двигателями, датчик горизонта, ось чувствительности которого параллельна главной оси гироскопического чувствительного элемента, блок управления прецессионным движением гироскопического чувствительного элемента, вход которого соединен с выходом датчика горизонта, а выходы с соответствующими датчиками момента гироскопического чувствительного элемента, блок выработки угла курса и углов наклона объекта, с входами которого соединены выходы датчиков углов поворота, в которую введен блок выработки угла наклона внутренней оси карданова подвеса, входы которого соединены с выходами датчиков углов поворота, а выход соединен с входом блока выработки угла курса и углов наклона объекта.
Для удобства использования информации с выходов датчиков углов поворота при использовании в качестве блока выработки угла курса и углов наклона объекта и блока выработки угла наклона внутренней оси подвеса ЭВМ в самоориентирующейся гироскопической системе курсоуказания выходы датчиков углов поворота могут быть соединены с блоками выработки угла курса и углов наклона объекта и угла наклона внутренней оси подвеса через преобразователь угол-код.
Сущность изобретения поясняются чертежами (фиг.1 и 2), на которых соответственно приведены схема определения угла курса и схема самоориентирующейся гироскопической системы курсоуказания.
На схеме определения угла курса (см. фиг.1) плоскость Рг - горизонтальная плоскость, в которой располагается главная ось гироскопического чувствительного элемента, плоскость Ро - плоскость основания объекта.
После приведения к заданному направлению, известным образом ориетированному относительно географического меридиана (например, расположенному в плоскости меридиана), главная ось гироскопического чувствительного элемента расположена вдоль оси ОХг. и угол Кп в этом случае определяет значение угла приборного курса продольной оси ОХо объекта в высотно-азимутальной системе координат ОХоУоZо гироскопа направления.
На этапе приведения главной оси гироскопического чувствительного элемента к заданному направлению в точках 2 и 1 измеряются углы наклона ψ2 и ψ1 объекта в плоскостях с текущим для точек 2 и 1 расположением главной оси гироскопического чувствительного элемента, а также шаг ΔKП изменения угла приборного курса в системе координат OXoУoZo. соответствующий смежным замерам углов ψ2 и ψ1 в точках 2 и 1.
Проведя в процессе приведения главной оси гироскопического чувствительного элемента к заданному направлению указанные замеры, можно однозначно определить положение плоскости Ро относительно Рг и вычислить значение угла наклона ΘK объекта в плоскости, в которой расположена ось ОУ1, определяющая положение внутренней оси карданова подвеса гироскопа направления.
В соответствии с формулами сферической тригонометрии конечные выражения для определения угла ΘK имеют вид:
ΘK= arcsin(sinψ0•cosα1),
где α1, ψ0- промежуточные величины.
Чаще всего для решения задач навигации необходима информация о курсе К объекта в плоскости горизонта. Для этого используются следующие аналитические зависимости, использующие значение определенного угла ΘК, полученные из формул сферической тригонометрии:
K = K′+ΔK;
sinΔK = -sinψ•sinΘK; (2)
tgρ = tgΘK•cosψ;
tge = -tgϕ•cosρ
где К', ΔK, ρ и е - промежуточные величины, ψ - угол наклона объекта в плоскости, в которой расположена главная ось гироскопического чувствительного элемента (для случая, представленного на фиг.1, ψ = ψ1); ϕ - широта.
Таким образом, путем замера на этапе приведения углов наклона объекта в плоскостях с текущим расположением главной оси гироскопического чувствительного элемента и шагов изменения приборного курса, соответствующих смежным замерам, предлагаемый способ позволяет определять угол курса объекта в плоскости горизонта при стоянке объекта без использования дополнительного датчика наклона, измеряющего наклон объекта в плоскости, в которой расположена внутренняя ось карданова подвеса гироскопа направления.
Для повышения точности определения положения плоскости ОХоУо целесообразно на этапе приведения, когда изменяется положение главной оси гироскопического чувствительного элемента, определять множество значений углов наклона объекта и соответствующие смежным замерам шаги изменения в процессе приведения к заданному направлению угла приборного курса, получая с использованием зависимостей (1) усредненное значение угла ΘK.
При малых значениях угла отклонения направления главной оси гироскопического чувствительного элемента от заданного направления циркуляция главной оси гироскопического чувствительного элемента мала и соответственно малы приращения углов ψ и Кп, что снижает точность определения положения плоскости ОХоУо. В этом случае осуществляют принудительный разворот главной оси гироскопического чувствительного элемента в азимуте, увеличивая угол отклонения.
Самоориентирующаяся гироскопическая система курсоуказания (см.фиг.2) содержит гироплатформу, способную поворачиваться вокруг оси У1 относительно наружной рамы карданова подвеса 1. На гироплатформе установлен гироскопический чувствительный элемент 2 с расположенными на нем датчиками угла 3, датчиками момента 4 и датчик горизонта 5. Главная ось гироскопического чувствительного элемента 2 и ось чувствительности датчика горизонта 5 ориентированы параллельно оси Хг, перпендикулярной У1. Ось У1 лежит в плоскости основания объекта.
На оси У1 установлен моментный двигатель 6, управляемый через усилитель 7 сигналами датчика угла 3, возникающими при угловом рассогласовании главной оси гироскопического чувствительного элемента 2 относительно оси вращения его ротора.
Рама 1 может поворачиваться относительно основания объекта вокруг оси Zo, ориентированной по нормали к основанию.
На этой оси установлен моментный двигатель 8, управляемый через усилитель 9 сигналами датчика угла 3. Моментные двигатели 6 и 8 осуществляют непрерывное автоматическое совмещение оси гироплатформы с направлением оси вращения ротора гироскопа.
На осях карданова подвеса установлены вращающиеся трансформаторы - преобразователи 10 и 11, измеряющие углы поворота рамы 1 относительно основания объекта и гироплатформы. Значения этих углов поступают в блок 12 выработки угла курса и углов наклона объекта и блок 16 выработки угла наклона внутренней оси карданова подвеса.
Для управления гироскопическим чувствительным элементом гироскопическая система содержит блок 14 управления прецессионным движением, на вход которого от датчика горизонта 5 поступает информация о наклоне оси Хг относительно плоскости горизонта, а по входу 15 внешняя информация, например, о текущей широте, определяющей величину вертикальной составляющей угловой скорости вращения Земли.
На основании этой информации вырабатываются сигналы управления гироскопом в вертикальной и горизонтальной плоскостях.
По информации с датчика горизонта 5 осуществляется приведение главной оси гироскопического чувствительного элемента 2 к заданному направлению, например, лежащему в плоскости меридиана и плоскости горизонта.
На этапе приведения в блок 16 с датчика поворота 11 поступают значения угла поворота гироплатформы относительно наружной рамы карданова подвеса, определяющие при горизонтальном положении главной оси гироскопического чувствительного элемента, углы наклона ψ объекта в плоскости, в которой расположена главная ось гироскопического чувствительного элемента, а с датчика поворота 10 - значения угла поворота Кп внутренней рамы 1 относительно корпуса устройства, определяющие значения угла приборного курса.
В блоке 16 определяются приращения ΔKП угла приборного курса и в соответствии с выражениями (1) угол ΘK.
После завершения процесса приведения значения углов Кп, ψ и ΘK поступают в блок 12 выработки угла курса и углов наклона объекта, где в соответствии с алгоритмом (2), вырабатывается курс К объекта в горизонтальной плоскости. С использованием дополнительных выражений в блоке 12 могут также определяться углы продольного и поперечного наклонов объекта.
Полученные параметры с выхода 13 передаются внешнему потребителю.
Вычисления по зависимостям (1), (2) могут производиться с помощью ЭВМ (микропроцессора), входящей в состав блоков 12 и 16, а перед поступлением в указанные блоки значения углов поворота с выходов датчиков 10 и 11 для удобства использования могут преобразовываться в цифровую форму с помощью дополнительного блока, например преобразователя угол-код.
В частной реализации блок управления прецессионным движением 14 гироскопического чувствительного элемента может содержать усилитель привода в меридиан, ограничители (резисторы), коммутирующее устройство.
Усилитель привода в меридиан вырабатывает сигнал, который при помощи ограничителей и коммутирующего устройства подается на соответствующие датчики момента 4 гироскопического чувствительного элемента 2, обеспечивая выставку гироплатформы в вертикальной плоскости (например, в плоскость горизонта), приведение главной оси гироскопического чувствительного элемента к заданному направлению (например, в плоскость меридиана), работу самоориентирующейся системы в качестве хранителя направления (путем отключения датчика момента, управляющего движением гироскопического чувствительного элемента в азимуте).
Таким образом, применение предлагаемых способа и устройства позволяет совместить операции предварительного приведения главной оси гироскопического чувствительного элемента к заданному направлению и определения угла наклона объекта в плоскости, в которой расположена внутренняя ось карданова подвеса, повысить точность определения угла курса подвижного объекта на стоянке при отсутствии дополнительного датчика наклона, установленного параллельно внутренней оси карданова подвеса, конструктивно упростить и снизить стоимость изготовления самоориентирующейся гироскопической системы курсоуказания.
Источники информации
1. Назаров Б.И., Хлебников Г.А. Гиростабилизаторы ракет. -М., 1975.
2. Патент РФ N2000544, G 01 C 21/00, приоритет 26.11.91.
3. Воронков Н.М., Кутырев В.В. Гироскопическое ориентирование.- М.: Недра, 1989.
4. Патент РФ N 2062985, 6 G 01 C 19/38, приоритет 27.06.96.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОКУРСОКРЕНОУКАЗАНИЯ | 1999 |
|
RU2165074C1 |
| САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ СИСТЕМА КУРСОКРЕНОУКАЗАНИЯ | 1999 |
|
RU2166733C1 |
| СИСТЕМА КУРСОКРЕНОУКАЗАНИЯ | 2000 |
|
RU2171450C1 |
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ КУРСОКРЕНОУКАЗАНИЯ | 2001 |
|
RU2207506C1 |
| ГИРОГОРИЗОНТКОМПАС ДЛЯ ПОДВИЖНОГО ОБЪЕКТА | 1993 |
|
RU2062985C1 |
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ КУРСОКРЕНОУКАЗАНИЯ | 2004 |
|
RU2274832C1 |
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ КУРСОКРЕНОУКАЗАНИЯ (ВАРИАНТЫ) | 2006 |
|
RU2316730C1 |
| НАЗЕМНАЯ ГИРОСКОПИЧЕСКАЯ СИСТЕМА (ВАРИАНТЫ) | 2002 |
|
RU2213937C1 |
| САМООРИЕНТИРУЮЩАЯСЯ СИСТЕМА ГИРОКУРСОКРЕНОУКАЗАНИЯ | 2001 |
|
RU2192622C1 |
| СИСТЕМА ГИРОКУРСОКРЕНОУКАЗАНИЯ | 2001 |
|
RU2186339C1 |

Использование: для построения горизонтальной географической системы координат, преимущественно на наземных подвижных объектах. Технический результат - повышение точности определения курса объекта в плоскости горизонта, упрощение конструкции и уменьшение стоимости изготовления гирогоризонткомпаса. При определении угла курса объекта в процессе приведения главной оси гироскопического чувствительного элемента к заданному направлению измеряют углы наклона объекта в плоскости, в которой расположена главная ось гироскопического чувствительного элемента, и шаги изменения приборного курса. На основании произведенных измерений вычисляют угол наклона объекта в плоскости, в которой расположена внутренняя ось карданова подвеса. После приведения главной оси гироскопического чувствительного элемента к заданному направлению измеряют угол приборного курса, угол наклона объекта в плоскости, в которой расположена главная ось гироскопического чувствительного элемента, и угол курса объекта в плоскости горизонта. Система курсоуказания содержит гироплатформу в двухосном кардановом подвесе, гироскопический чувствительный элемент, главная ось которого перпендикулярна внутренней оси подвеса, датчик горизонта, ось чувствительности которого параллельна главной оси, блок управления прецессионным движением гироскопического чувствительного элемента, блок выработки угла курса и углов наклона объекта, блок выработки угла наклона внутренней оси карданова подвеса. 2 с. и 5 з.п. ф-лы, 2 ил.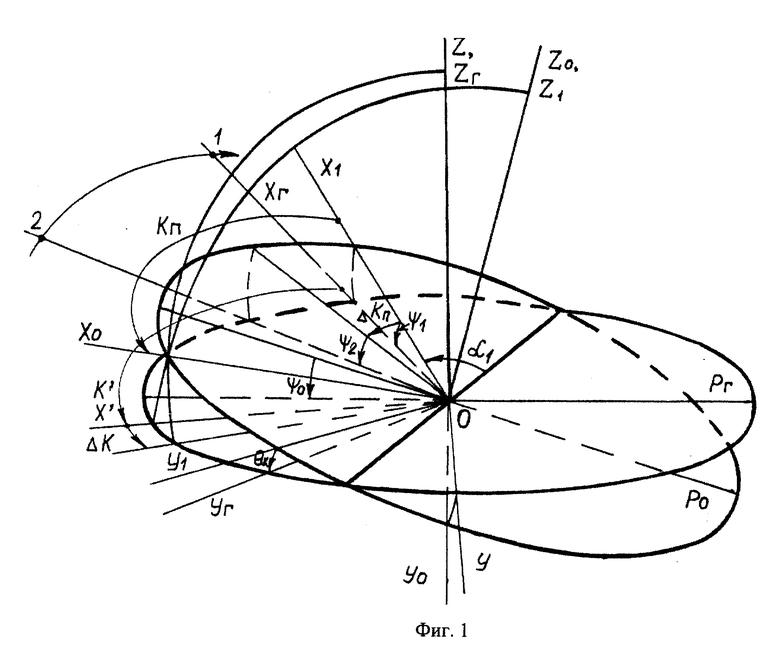

sinθk = sinψ0•cosα1,
где α1,ψ0 - промежуточные величины;
ψ1,ψ2 - углы наклона объекта в первой и второй плоскостях с текущим при замере соответствующего угла ψ1 и ψ2 расположением главной оси гироскопического чувствительного элемента;
ΔKп - шаг изменения угла приборного курса, соответствующий замерам углов ψ1 и ψ2.
4. Самоориентирующаяся гироскопическая система курсоуказания, содержащая гироплатформу в двухосном кардановом подвесе с датчиками углов поворота и моментными двигателями по осям подвеса, гироскопический чувствительный элемент с двумя измерительными осями, с датчиками углов и датчиками момента на каждой из измерительных осей, причем главная ось гироскопического чувствительного элемента перпендикулярна внутренней оси подвеса, усилители стабилизации, входы которых соединены с соответствующими датчиками углов гироскопического чувствительного элемента, а выходы - с моментными двигателями, датчик горизонта, ось чувствительности которого параллельна главной оси гироскопического чувствительного элемента, блок управления прецессионным движением гироскопического чувствительного элемента, вход которого соединен с выходом датчика горизонта, а выходы - с соответствующими датчиками момента гироскопического чувствительного элемента, блок выработки угла курса и углов наклона объекта, с входами которого соединены выходы датчиков углов поворота, отличающаяся тем, что в самоориентирующую гироскопическую систему курсоуказания введен блок выработки угла наклона внутренней оси карданова подвеса, входы которого соединены с выходами датчиков углов поворота, а выход соединен с входом блока выработки угла курса и углов наклона объекта.
| Воронков Н.М | |||
| и др | |||
| Гироскопическое ориентирование | |||
| - М.: Недра, 1989, с.73-76 | |||
| ГИРОГОРИЗОНТКОМПАС ДЛЯ ПОДВИЖНОГО ОБЪЕКТА | 1993 |
|
RU2062985C1 |
| RU 2073206 С1, 10.02.1997 | |||
| СПОСОБ КОРРЕКЦИИ ГИРОКОМПАСА | 1999 |
|
RU2153152C1 |
| DE 3033280 А, 22.04.1982. | |||

