Изобретение относится к области измерительной техники и может быть использовано в системах навигации, топопривязки и наведения наземных подвижных объектов.
Известен наземный гирокомпас на динамически настраиваемом гироскопе (ДНГ) [1], в котором ось вращения ротора гироскопа вертикальна, а ДНГ установлен на платформе, которая двигателем может разворачиваться относительно корпуса прибора вокруг вертикальной оси от упора до упора на 180o. ДНГ по обеим измерительным осям включен в режим "электрической пружины", сигналы с которой используются для вычисления угла курса.
Недостатком известного наземного гирокомпаса является невозможность его работы на подвижном объекте, что связано с возникновением в процессе движения и качки подвижного объекта значительных возмущающих воздействий, прикладываемых к основанию гирокомпаса, а также случайных возмущений основания гирокомпаса со стороны объекта на стоянке.
Известна гироскопическая навигационная система для подвижных объектов [2], свободная от недостатка, указанного выше, в которой трехстепенной гироскоп установлен на гиростабилизированной платформе, которая в свою очередь установлена в двухстепенном кардановом подвесе со следящими двигателями по осям подвеса. При работе прибора по сигналам акселерометров, датчиков угла гироскопа осуществляется коррекция и силовая стабилизация гиростабилизированной платформы к плоскости горизонта с помощью датчиков момента гироскопа и следящих двигателей.
На гиростабилизированной платформе установлен датчик абсолютной угловой скорости, ось чувствительности которого перпендикулярна плоскости гиростабилизированной платформы. По сигналам датчика абсолютной угловой скорости, сигналам на датчиках момента гироскопа аналитически вырабатывается курс объекта.
В результате силовой стабилизации гиростабилизированной платформы в процессе движения, а также на стоянке подвижного объекта значительно снижается уровень внешних воздействий, прикладываемых к основанию гироскопа, и, как следствие, обеспечивается его работоспособность в условиях внешних возмущений.
Недостатком известной гироскопической навигационной системы является пониженная по сравнению с известным наземным гирокомпасом точность определения угла курса, особенно на стоянке подвижного объекта, что связано с появлением дополнительной погрешности определения угла курса из-за погрешностей от нестабильности масштабных коэффициентов, нестабильности собственного дрейфа гироскопа, неидентичности характеристик гироскопа по измерительным осям.
Наличие дополнительной погрешности определения угла курса связано с тем, что в известной навигационной системе отсутствует возможность разворота гироскопического чувствительного элемента в азимуте для осуществления в процессе аналитического определения угла курса автокомпенсации указанных выше погрешностей так, как это осуществляется в известном наземном гирокомпасе [1].
В качестве прототипа изобретения принята гироскопическая навигационная система для подвижных объектов [2].
Изобретение направлено на повышение точности определения угла курса преимущественно на стоянке подвижного объекта с сохранением возможности работы гироскопической навигационной системы при движении объекта, уменьшение объема дополнительного операторского обслуживания (связанного, например, с предварительной грубой настройкой плоскости горизонта при определении угла курса), характерного для применяемых в настоящее время наземных гирокомпасов, сокращение времени готовности гироскопической системы к точному определению угла курса при остановках подвижного объекта на марше.
Это достигается тем, что в первом варианте в известной наземной гироскопической системе, содержащей установленный на гиростабилизированной платформе гироскопический чувствительный элемент, имеющий две измерительные оси, каждая из которых образована соответствующими датчиком угла и датчиком момента, первый и второй акселерометры горизонтальных каналов, гиростабилизированная платформа с гироскопическим чувствительным элементом установлена в кардановом подвесе, датчики стабилизирующего момента, установленные по осям подвеса, преобразователь информации и управления, причем выходы датчиков углов гироскопического чувствительного элемента, выходы акселерометров подключены к соответствующим входам преобразователя информации и управления, выходы которого подключены к входам датчиков момента гироскопического чувствительного элемента и входам датчиков стабилизирующего момента, установленных по осям подвеса, карданов подвес выполнен трехосным, причем внутренняя рама карданова подвеса выполняет роль гиростабилизированной платформы, а оси чувствительности акселерометров лежат в плоскости, параллельной измерительным осям гироскопического чувствительного элемента.
Во втором варианте в известной наземной гироскопической системе, содержащей установленный на гиростабилизированной платформе гироскопический чувствительный элемент, имеющий две измерительные оси, каждая из которых образована соответствующими датчиком угла и датчиком момента, первый и второй акселерометры горизонтальных каналов, гиростабилизированная платформа с гироскопическим чувствительным элементом установлена в кардановом подвесе, датчики стабилизирующего момента и датчики угла, установленные по осям подвеса, преобразователь информации и управления, причем выходы датчиков углов гироскопического чувствительного элемента, выходы акселерометров, выходы датчиков углов подключены к соответствующим входам преобразователя информации и управления, выходы которого подключены к входам датчиков момента гироскопического чувствительного элемента и входам датчиков стабилизирующего момента, установленных по осям подвеса, карданов подвес выполнен трехосным, причем внутренняя рама карданова подвеса выполняет роль гиростабилизированной платформы, а оси чувствительности акселерометров лежат в плоскости, параллельной измерительным осям гироскопического чувствительного элемента.
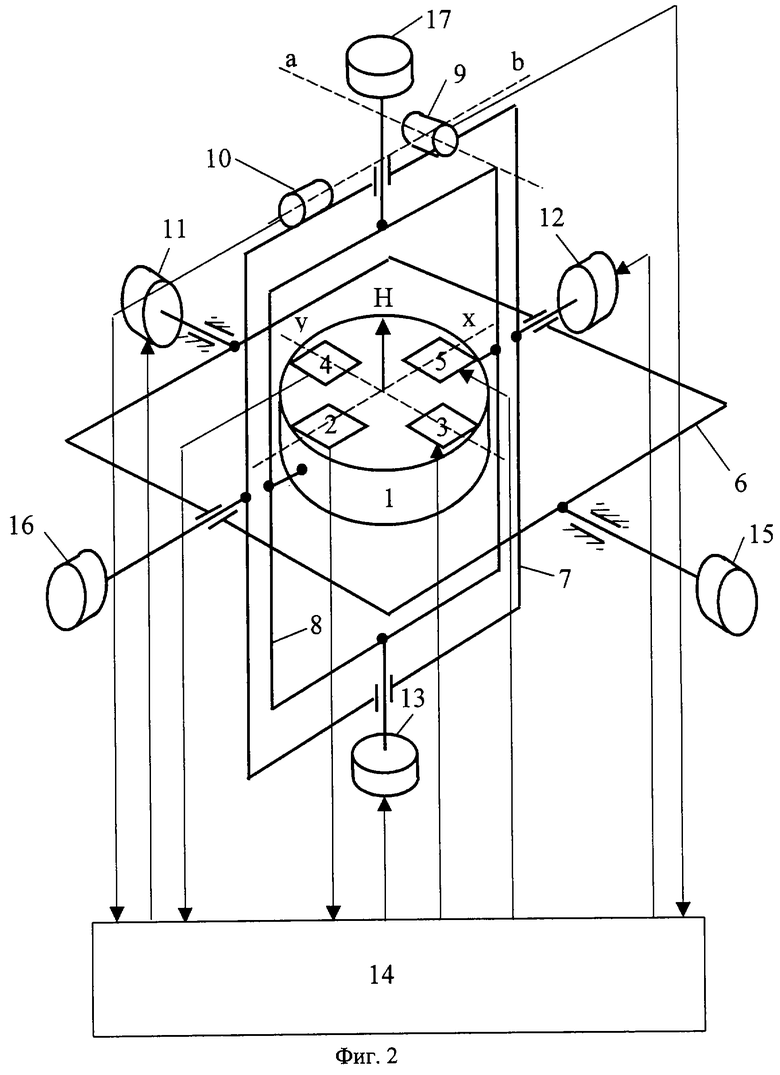
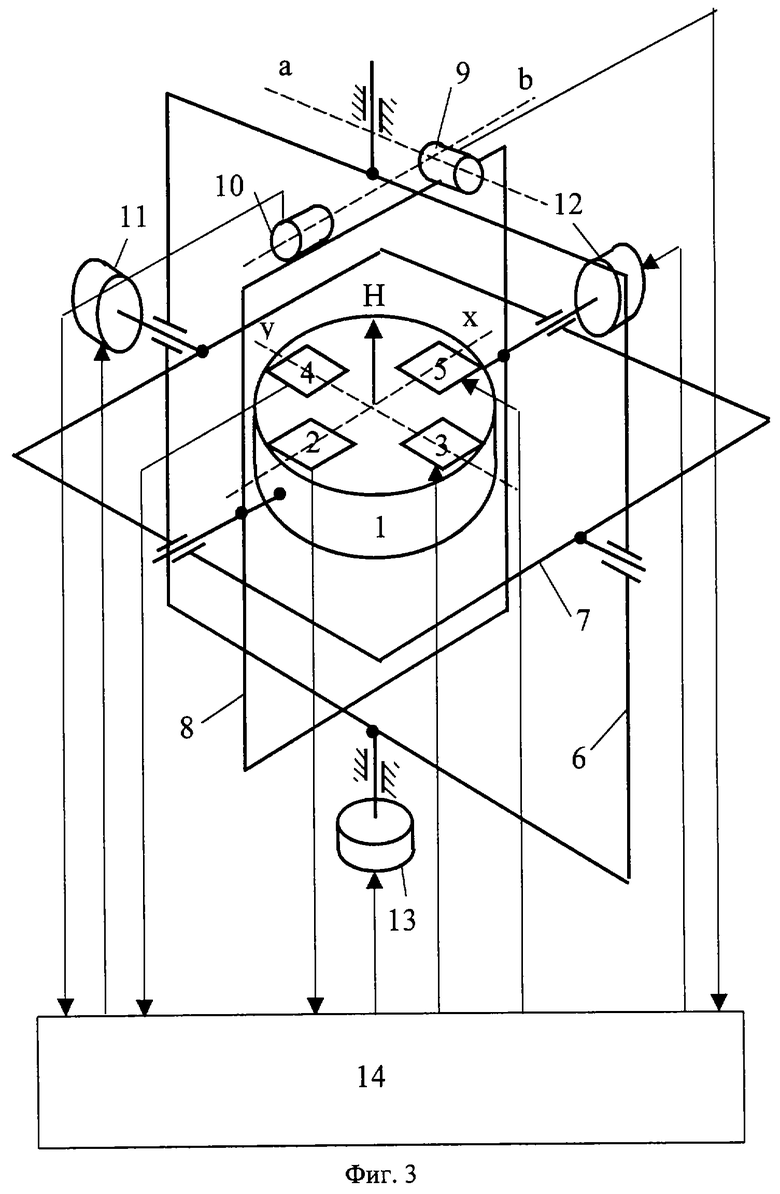
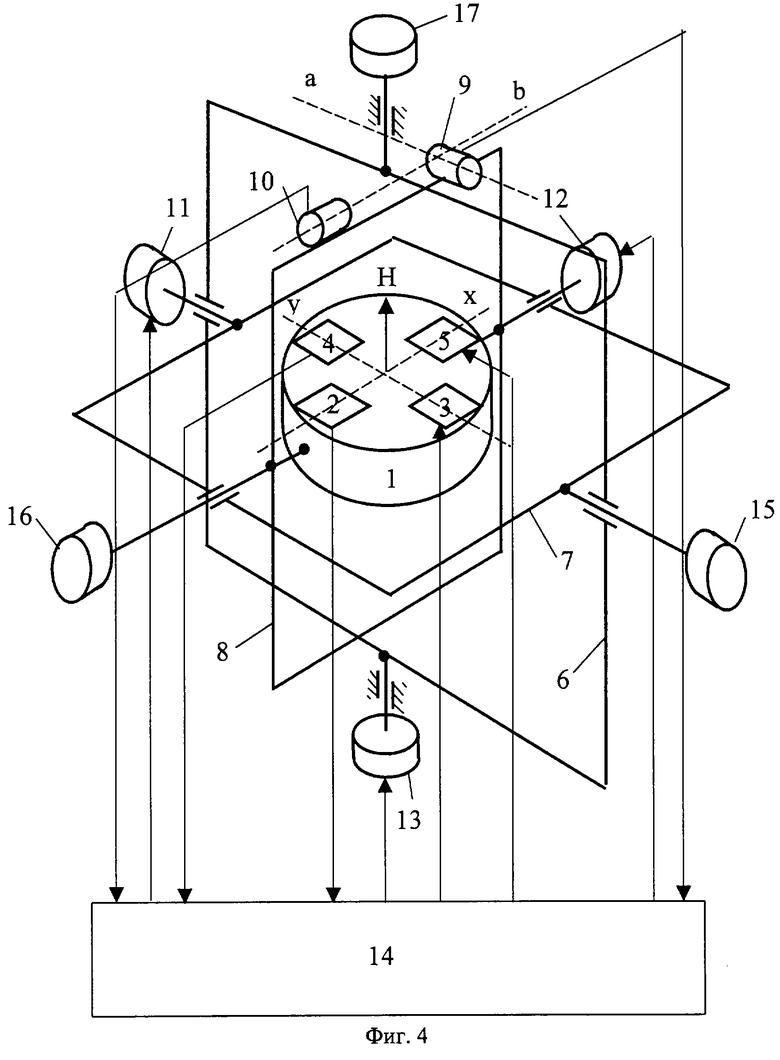
Сущность изобретения поясняется чертежами (фиг.1-4), на которых приведены схемы наземной гироскопической системы по обоим вариантам с двумя возможными схемами реализации трехосного карданова подвеса по предлагаемому изобретению.
Наземная гироскопическая система по обоим вариантам (см. фиг.1-4) содержит гироскопический чувствительный элемент 1 с двумя измерительными осями х и у. Первая измерительная ось х образована датчиком угла 2 и датчиком момента 3, вторая у - датчиком угла 4 и датчиком момента 5.
Гироскопический чувствительный элемент 1 установлен на гиростабилизированной платформе, в свою очередь установленной в трехосном кардановом подвесе, включающем рамы 6, 7, 8. Внутренняя рама 8 выполняет роль гиростабилизированной платформы.
Акселерометры 9, 10 установлены в наземной гироскопической системе так, что их оси чувствительности а и b лежат в плоскости (ab), параллельной плоскости (ху), в которой лежат измерительные оси х и у гироскопического чувствительного элемента 1.
В предлагаемой наземной гироскопической системе по обоим вариантам (см. фиг. 1-4) по осям рам карданова подвеса установлены датчики стабилизирующего момента 11, 12, 13, связанные с выходами преобразователя информации и управления 14.
В наземной гироскопической системе по второму варианту (см. фиг.2, 4) по осям рам карданова подвеса дополнительно установлены датчики угла 15, 16, 17, подключенные к преобразователю информации и управления 14.
Выходы датчиков углов 2, 4 гироскопического чувствительного элемента 1, выходы акселерометров 9, 10 подключены ко входам преобразователя информации и управления 14, соответствующие выходы которого также подключены к входам датчиков момента 3, 5 гироскопического чувствительного элемента 1.
Работа устройства осуществляется следующим образом.
При включении устройства после разгона ротора гироскопического чувствительного элемента 1 по сигналам акселерометров 9, 10 в преобразователе информации и управления 14 вырабатываются сигналы коррекции, которые с соответствующих выходов подаются на датчики момента 3, 5, заставляя ротор гироскопического чувствительного элемента 1 прецессировать в плоскость горизонта.
Сигналы рассогласования положений ротора и корпуса гироскопического чувствительного элемента 1 с выходов датчиков угла 2, 4 поступают в преобразователь информации и управления 14, в котором формируются сигналы стабилизации, поступающие на датчики стабилизирующего момента 11, 12.
Совместная работа акселерометров 9, 10, датчиков угла 2, 4 и датчиков момента 3, 5 гироскопического чувствительного элемента 1, датчиков стабилизирующего момента 11, 12 обеспечивает стабилизацию положения гироплатформы в плоскости горизонта как на стоянке, так и в процессе движения и маневрирования объекта без участия оператора.
Включение гироскопического чувствительного элемента 1 в контур коррекции и стабилизации гироплатформы обеспечивает за счет соответствующего выбора коэффициентов коррекции значительное снижение динамических ошибок гироскопической системы при воздействии поступательных ускорений со стороны объекта на акселерометры 9, 10 в процессе движения.
На стоянке подвижного объекта, при которой отсутствуют поступательные ускорения со стороны объекта, гироскопический чувствительный элемент 1 исключается из контура коррекции и стабилизации гироплатформы, а сам гироскопический чувствительный элемент 1 работает в режиме обратной связи по току датчиков момента.
Сигналы с датчиков углов 2, 4 гироскопического чувствительного элемента 1 после обработки в преобразователе информации и управления 14 подаются на датчики момента 3, 5 гироскопического чувствительного элемента 1, обеспечивая работу его измерительных осей в режиме обратной связи по току датчиков момента.
В преобразователе информации и управления 14 по сигналам в цепях обратной связи гироскопического чувствительного элемента 1 и сигналам акселерометров 9, 10, определяющих ошибку горизонтирования гироплатформы, аналитически вычисляется курс объекта.
В процессе определения угла курса с помощью датчика момента 13, упоров или по информации с датчика угла 17 по сигналам преобразователя информации и управления 14 осуществляется разворот корпуса гироскопического чувствительного элемента 1 в азимуте в фиксированные положения (например, на 180o) для автокомпенсации погрешностей гироскопического чувствительного элемента 1, что позволяет повысить точность аналитической выработки угла курса [1].
Таким образом, предлагаемая гироскопическая система позволяет обеспечить повышенную точность определения угла курса подвижного объекта на стоянке за счет автокомпенсации ряда погрешностей гироскопического чувствительного элемента 1, при одновременном сохранении постоянной готовности гироскопической системы к точному определению угла курса в процессе движения.
Необходимо отметить, что структура построения устройства по второму варианту позволяет реализовать алгоритмы определения азимута с разворотами гироскопического чувствительного элемента 1 в азимуте на стоянке, при которых гироскопический чувствительный элемент 1 не выключается из контура коррекции и стабилизации гироплатформы, т.е. гироскопическая система работает так же, как и в движении.
В этом случае для аналитического вычисления угла курса объекта на стоянке используются вырабатываемые преобразователем информации и управления 14 сигналы коррекции, подаваемые на датчики момента 3, 5, которые так же, как сигналы в цепях обратной связи гироскопического чувствительного элемента 1 при его работе в режиме обратной связи по току датчиков момента на стоянке, как описано выше, содержат информацию о проекциях горизонтальной составляющей угловой скорости вращения Земли на измерительные оси гироскопического чувствительного элемента 1, т.е. информацию об азимутальном положении объекта.
При разворотах корпуса гироскопического чувствительного элемента 1 в азимуте в фиксированные положения для обеспечения работоспособности системы коррекции и системы стабилизации (см. фиг.2) может осуществляться аналитическое приведение сигналов стабилизации с выходов датчиков углов 2, 4 гироскопического чувствительного элемента 1 к системе координат датчиков стабилизирующего момента 11, 12, а сигналов коррекции с выходов акселерометров 9, 10 - к системе координат датчиков момента 3, 5 гироскопического чувствительного элемента 1 в системе по второму варианту.
Преимуществом второй схемы реализации карданова подвеса (см. фиг.4) в этом случае является отсутствие необходимости указанного выше дополнительного тригонометрического преобразования сигналов.
Дополнительным преимуществом предлагаемой гироскопической системы является исключение влияния на точность определения угла курса в различных точках маршрута подвижного объекта межзапуского дрейфа гироскопического чувствительного элемента 1 (нет необходимости останавливать гироскоп при смене позиции), а предлагаемой гироскопической системы по второму варианту при наличии датчиков углов 11 и 12, например, перед наземным компасом [1] - возможность определения углов наклона объекта в процессе движения.
В предлагаемой гироскопической системе в качестве гироскопического чувствительного элемента 1 может быть использован динамически настраиваемый гироскоп, в качестве датчиков углов - синусно-косинусные вращающиеся трансформаторы (СКВТ).
В частной реализации при использовании в качестве датчиков углов СКВТ преобразователь информации и управления 14 может содержать преобразователь угол-код, а также аналого-цифровые и цифроаналоговые преобразователи, блок обмена с внешним устройством, вычислитель (микроЭВМ) и обеспечивает преобразование сигналов с датчиков углов в цифровую форму, аналоговых сигналов с выходов датчиков углов 2, 4 гироскопического чувствительного элемента 1, акселерометров 9, 10 в цифровой код, цифровых кодов в аналоговый сигнал на входы датчиков момента 3, 5 гироскопического чувствительного элемента 1, датчиков стабилизирующего момента 11, 12, датчика момента 13, передачу и прием информации от внешнего устройства, обработку цифровой информации в соответствии с алгоритмами работы устройства.
Применение предлагаемого устройства позволяет повысить точность определения угла курса подвижного объекта, уменьшить объем операторского обслуживания, характерного для применяемых в настоящее время наземных гирокомпасов, обеспечить высокую мобильность при смене позиций подвижным объектом с предлагаемой гироскопической системой на борту.
Библиографические данные
1. Шестов С.А., Мокрышев С.В. Развитие наземных гироскопов, построенных на основе гиротахометров // Гироскопия и навигация, 1 (28). - 2000 г., - с. 95-112.
2. Патент на изобретение РФ 2000544, G 01 C 21/00, Гироскопическая навигационная система для подвижных объектов // Беленький В.А. Приоритет 26.11.91 г. Бюллетень 33-36. - 1993 г., - c.126.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА КУРСА ОБЪЕКТА И САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ СИСТЕМА КУРСОУКАЗАНИЯ | 2000 |
|
RU2186338C1 |
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОКУРСОКРЕНОУКАЗАНИЯ | 1999 |
|
RU2165074C1 |
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ КУРСОКРЕНОУКАЗАНИЯ | 2001 |
|
RU2207506C1 |
| СИСТЕМА КУРСОКРЕНОУКАЗАНИЯ | 2000 |
|
RU2171450C1 |
| САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ СИСТЕМА КУРСОКРЕНОУКАЗАНИЯ | 1999 |
|
RU2166733C1 |
| ГИРОСКОПИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2169903C1 |
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ КУРСОКРЕНОУКАЗАНИЯ | 2004 |
|
RU2274832C1 |
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ КУРСОКРЕНОУКАЗАНИЯ (ВАРИАНТЫ) | 2006 |
|
RU2316730C1 |
| НАЗЕМНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1999 |
|
RU2165075C1 |
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ КУРСОКРЕНОУКАЗАНИЯ | 1996 |
|
RU2124184C1 |
Использование: в системах навигации, топопривязки и наведения наземных подвижных объектов. Сущность: наземная гироскопическая система по вариантам содержит гироплатформу в трехосном кардановом подвесе с датчиками момента и датчиками угла по осям подвеса, гироскопический чувствительный элемент, установленный на гироплатформе, акселерометры, оси чувствительности которых лежат в плоскости, параллельной измерительным осям гироскопического чувствительного элемента, преобразователь информации и управления. Технический результат: повышение точности определения угла курса, уменьшение объема операторского обслуживания, сокращение времени готовности к точному определению угла курса при остановках подвижного объекта. 2 с.п. ф-лы, 4 ил.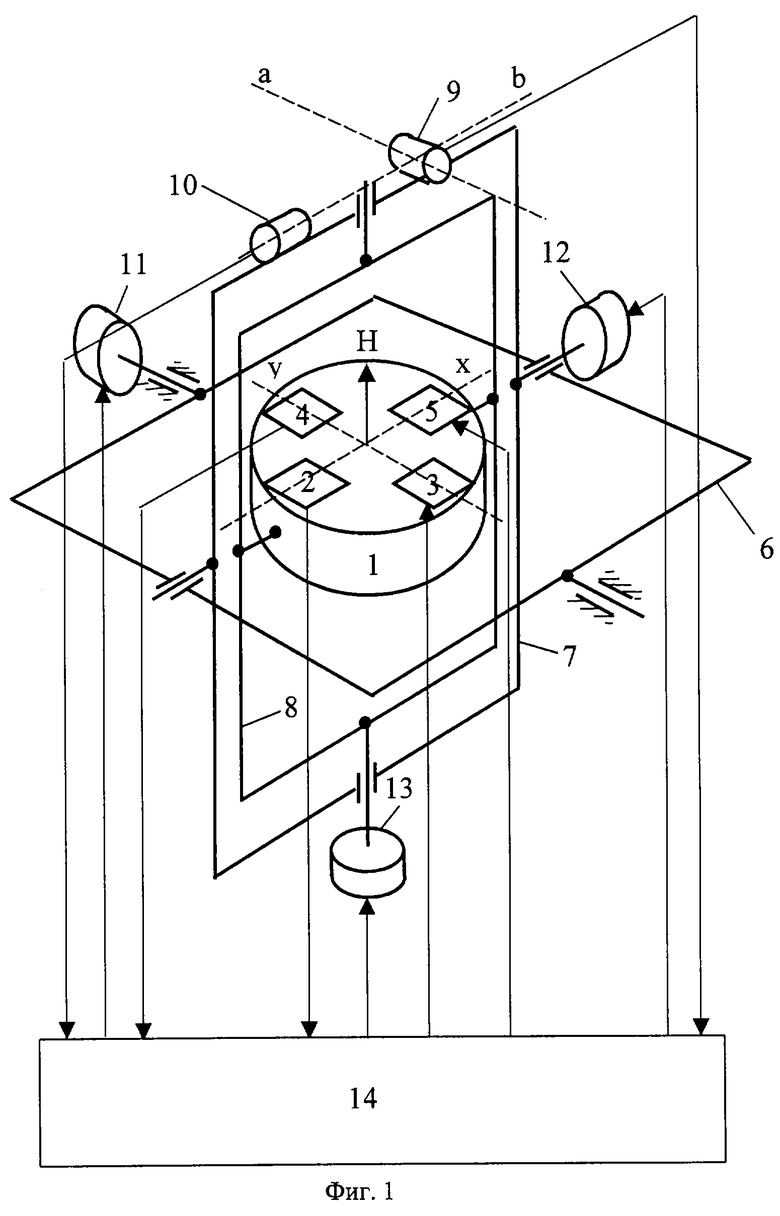
| RU 2000544 С, 07.09.1993 | |||
| НАЗЕМНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1999 |
|
RU2165075C1 |
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ КУРСОКРЕНОУКАЗАНИЯ | 1996 |
|
RU2124184C1 |
| DE 3019372 А, 26.11.1981 | |||
| Способ приготовления хромового катализатора для деструктивного дегидрирования | 1936 |
|
SU48212A1 |

