Настоящее изобретение относится к устройству и способу обнаружения удара о лопасть газотурбинного двигателя, в частности лопасть вентилятора.
Газотурбинный двигатель, установленный на летательном аппарате, может быть поврежден предметами, которые засасываются двигателем во время его работы. Эти предметы могут быть представлены различными видами, например птицами, камнями или льдом.
После засасывания предметов последние перемещаются из передней в заднюю часть двигателя, ударяясь о различные элементы двигателя. Это явление известно специалистам под названием «попадание инородных тел».
В зависимости от свойств, плотности и относительной скорости тел, которые втянуты двигателем, некоторые части двигателя могут быть в той или иной степени повреждены.
Для сохранения высокого уровня безопасности и надежности двигателя во время его эксплуатации необходимо обнаружить повреждения, причиной которых стали такие попадания, для производства ремонта или замены элементов поврежденного двигателя.
При совершении коммерческих полетов с пассажирами на борту перед каждым полетом производится визуальный осмотр газотурбинных двигателей. Однако такой контроль имеет множество недостатков. Во-первых, такой визуальный контроль не позволяет обеспечить в полной мере надежное обнаружение, операторы не могут обнаружить небольшие повреждения, при этом последние являются, кроме того, трудно выявляемыми. Во-вторых, после обнаружения повреждения необходимо немедленно приступить к выполнению операций по техническому обслуживанию, что требует остановки летательного аппарата и, как следствие, задержки его вылета. Такое запоздалое обнаружение последствий попадания инородного тела создает, таким образом, неудобства для пассажиров перед посадкой в упомянутый летательный аппарат.
Из заявки на патент FR2840358 Al фирмы SNECMA известна система обнаружения повреждений ротора двигателя летательного аппарата, содержащая средства измерения вибрации и скорости ротора во время определенного полета. Однако такая система не имеет необходимой точности для обнаружения попадания инородного тела.
Из заявки на патент EP 1312766 A2 фирмы ROLLS-ROYCE известен способ обнаружения удара о лопатку ротора, согласно которому измеряют падение скорости ротора для подачи сигнала тревоги. Такое обнаружение содержит недостаток, который заключается в том, что оно слабо распознаваемо. Действительно, в случае помпажа двигателя скорость ротора уменьшается и подается сигнал тревоги, хотя ни одно тело не попало в двигатель. Для устранения этого недостатка в заявке на патент EP 1312766 A2 предлагается добавить датчики для измерения угла кручения двигателя и, таким образом, повысить точность способа. Такой способ, с многочисленными датчиками, не является удовлетворительным и не позволяет точно и надежно обнаружить попадание инородного тела.
Для устранения этих недостатков изобретение относится к способу автоматизированного обнаружения попадания, по меньшей мере, одного инородного тела в газотурбинный двигатель, содержащий ротор, способ, согласно которому:
измеряют мгновенный режим ротора;
фильтруют сигнал режима ротора для разделения его статической составляющей от его динамической составляющей;
сравнивают отфильтрованную динамическую составляющую с эталонной резонансной волной ротора для получения показателя попадания, причем эталонная резонансная волна соответствует вибрационной импульсной реакции ротора;
сравнивают полученный показатель попадания с порогом обнаружения;
подают сигнал обнаружения попадания инородного тела, когда показатель попадания выше порога обнаружения.
Вибрационная реакция ротора представляет собой его характеристические признаки, обусловленные ударом, т.е. толчкообразным движением. Под эталонной резонансной волной понимается вибрационная импульсная реакция, измеренная на роторе после попадания тела в упомянутый ротор.
Благодаря изобретению временная динамическая составляющая режима ротора сравнивается с его характеристическими признаками для выявления попадания. Способ согласно изобретению обеспечивает большее распознавание, чем способ на основе достигнутого уровня техники, базирующийся исключительно на установлении пороговой величины по амплитуде динамической составляющей режима ротора R(t); причем динамическая составляющая большой амплитуды может иметь множество причин.
Благодаря изобретению можно не обращать внимания на вибрации с большой амплитудой (например, помпаж), когда форма динамической составляющей режима ротора R(t) не соответствует форме эталонной резонансной волны. Кроме того, можно обнаружить попадания так называемых тел со «слабой энергией» (небольшой массой, небольшой скоростью), приводящих к вибрациям с малой амплитудой; причем такое обнаружение не представляется возможным посредством способа на основании достигнутого уровня техники.
Предпочтительным образом, данный способ реализуется без дополнительного использования датчика и без какой-либо модификации конструкции.
Предпочтительно, эталонная резонансная волна ротора соответствует импульсной реакции первой крутильной моды ротора.
Предпочтительно, поиск в отфильтрованной динамической составляющей импульсной реакции первой крутильной моды ротора, характеристики которой вместе с тем известны, позволяет получить коэффициент попадания, который позволяет определять вибрацию.
Действительно, импульсная реакция первой крутильной моды присутствует только после временного возбуждения в кручении ротора, которое является типичным при попадании инородного тела. Таким образом, обеспечивается надежное и точное обнаружение попадания.
Также, предпочтительно, получают произведение сверток между отфильтрованной динамической составляющей и эталонной резонансной волной для получения показателя попадания.
Согласно первому варианту эталонную резонансную волну измеряют непосредственно на роторе двигателя, на котором осуществляется способ обнаружения.
Таким образом, характеристики импульсной реакции первой крутильной моды ротора (частота, ослабление) определены экспериментальным образом.
Согласно второму варианту, эталонную резонансную волну определяют теоретически в зависимости от характеристик импульсной реакции первой крутильной моды ротора (частота, ослабление и т.д.).
Предпочтительно, ротор является ротором низкого давления газотурбинного двигателя; причем сравнивают отфильтрованную динамическую составляющую с эталонной резонансной волной ротора низкого давления для получения показателя попадания; причем эталонная резонансная волна соответствует вибрационной импульсной реакции ротора низкого давления.
Изобретение будет лучше понятно со ссылкой на прилагаемые фигуры чертежа, на которых:
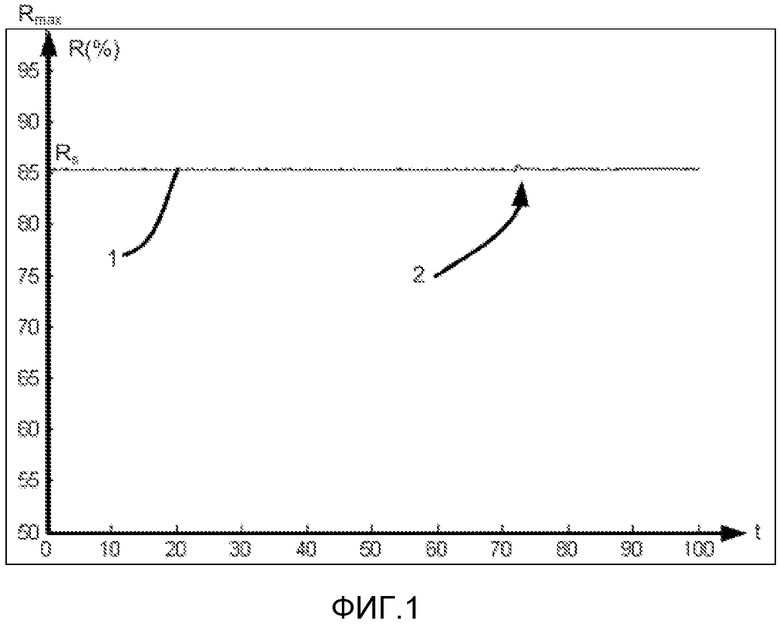
фиг. 1 изображает измерение режима ротора низкого давления в течение определенного времени;
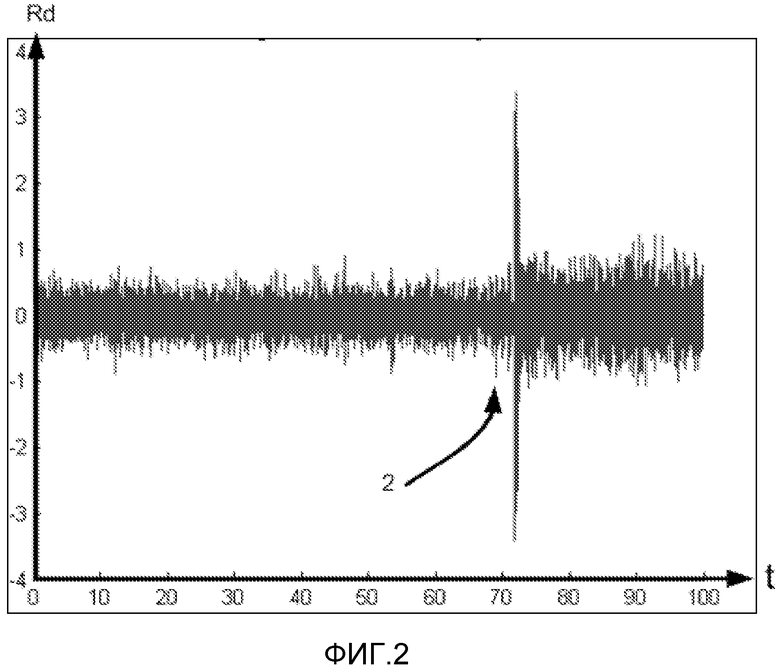
фиг. 2 изображает динамическую составляющую режима ротора низкого давления, представленную на фиг. 1;
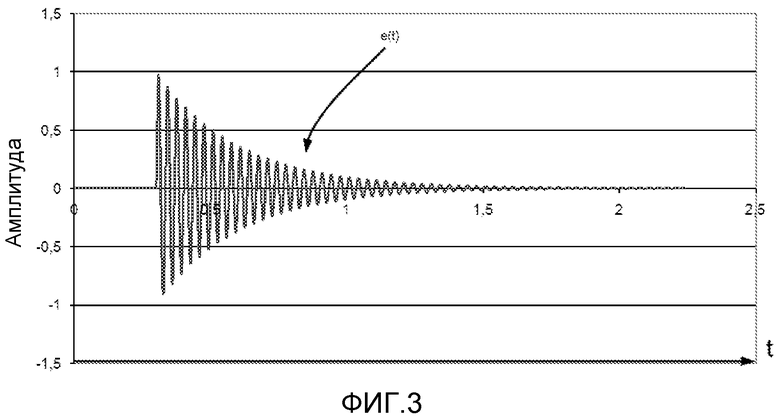
фиг. 3 изображает эталонную резонансную волну ротора низкого давления;
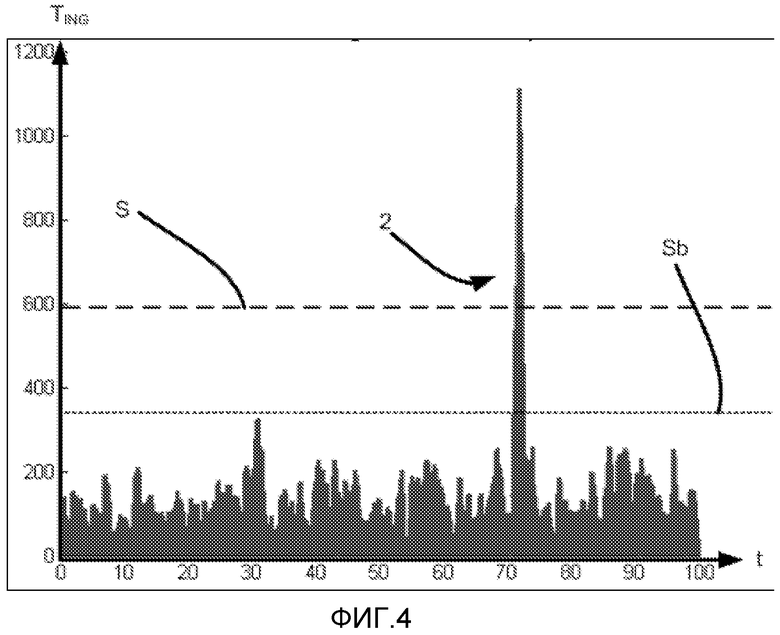
фиг. 4 изображает показатель попадания, соответствующий мере сходства между динамической составляющей режима ротора и эталонной резонансной волной упомянутого ротора.
Изобретение относится к способу точного обнаружения попадания инородного тела в двухвальный газотурбинный двигатель, содержащий вал ротора низкого давления и вал ротора высокого давления; причем вентилятор жестко соединен с ротором низкого давления.
Как показано на фиг. 1, режим вращения R(t) ротора низкого давления измеряется в течение времени посредством известного специалистам фонического колеса, располагаемого для измерения угловой скорости вала ротора низкого давления. Понятно, что режим ротора низкого давления также мог бы быть измерен другими средствами, в частности расположенными в двигателе акселерометрами.
В результате такого измерения получаем кривую 1, по существу постоянную в течение времени, вокруг статического режима ротора низкого давления Rs. Как это показано на фиг. 1, режим вращения R(t) упорядочен относительно максимальной величины режима ротора низкого давления. Как это показано на фиг. 1, статический режим Rs ротора низкого давления составляет приблизительно 85% максимального режима.
В период измерения тело с небольшой массой (приблизительно 50г) попадает в двигатель. Кривая 1, изображающая режим вентилятора R(t), содержит колебание 2 в момент попадания тела в двигатель; причем такое колебание является очень слабым и составляет около 0,5% значения статического режима Rs. Это колебание не может быть обнаружено непосредственно в результате измерения режима ротора низкого давления R(t). Действительно, такие колебания могут быть связаны с шумами измерения или с явлениями, отличными от попадания, в частности с явлениями помпажа двигателя.
Известно, что режим ротора низкого давления R(t), измеренный посредством фонического колеса, обладает статической составляющей Rs и динамической составляющей Rd(t) и раскладывается в следующем виде:
(1) R(t)=Rs+Rd(t)
Для выявления колебания 2 режим ротора низкого давления R(t) фильтруют для сохранения только динамической составляющей Rd(t) сигнала, например, посредством полосовой фильтрации, сосредоточенной на частоте эталонной резонансной волны.
Заявителем отмечено, что когда тело сталкивается с вентилятором вследствие попадания, ротор низкого давления, сопряженный с вентилятором, реагирует, вибрируя согласно первой крутильной моде, наподобие колокола, испуская резонансную волну, частота и форма которой свойственна ротору. Данная вибрационная реакция в результате короткого удара представляет собой импульсную реакцию первой крутильной моды ротора низкого давления. Такая характерная реакция позволяет различить вибрационные возмущения вследствие попадания тел, от возмущений вследствие шумов или наружных явлений; причем их влияние, в общем плане, на режим ротора низкого давления R(t) будет почти идентичным.
Действительно, попадание или помпаж приводят к появлению колебаний, общая интенсивность которых аналогична, когда производится анализ режима двигателя. Однако только колебания, форма и амплитуда которых аналогичны форме и амплитуде импульсной реакции ротора низкого давления, соответствуют попаданию инородного тела.
В результате попадания инородного тела динамическая составляющая Rd(t) сигнала режима ротора низкого давления R(t) выражается, таким образом, в целом в следующем виде:
(2) Rd(t)= C(t).cos(wт (t)*t+Φ)
В этой формуле C(t).cos(wт(t)*t+Φ) является возмущением, обусловленным вибрационной реакцией ротора низкого давления в результате попадания. Такое возмущение зависит от параметра амплитуды C(t), параметра фазы Φ и параметра пульсации wт, соответствующего первой крутильной моде ротора низкого давления.
Ротор низкого давления обладает несколькими крутильными модами на низкой частоте. При попадании инородного тела только первая крутильная мода реагирует в значительной степени. Импульсная реакция последнего будет представлять собой, таким образом, характеристические признаки, характеризующие попадание. Вследствие попадания C(t) будет сильно изменяться по следующей формуле:
(3) C(t)=C.exp(-t/τт)
C является амплитудой возмущения и зависит от «серьезности» попадания, причем амплитуда возмущения является очень слабой по сравнению со значением статического режима Rs. Параметр ослабления τт зависит от ослабления первой крутильной моды ротора низкого давления и частоты собственных колебаний этой моды.
Таким образом, при попадании инородного тела в двигатель динамическая составляющая Rd(t) ротора низкого давления сильно похожа на импульсную реакцию первой крутильной моды e(t) ротора низкого давления, представленную на фиг. 3. Импульсная реакция первой крутильной моды ротора e(t) сравнима с динамической реакцией Rd(t) режима ротора низкого давления R(t) для определения, попало ли тело в двигатель. Другими словами, отфильтрованная динамическая составляющая сравнивается с эталонной резонансной волной e(t) ротора низкого давления для получения показателя попадания TING, соответствующего мере сходства между эталонной резонансной волной e(t) и динамической составляющей Rd(t) измеренного сигнала режима.
Для выполнения сравнения представляется необходимым предварительно определить эталонную резонансную волну e(t).
Согласно первому варианту осуществления изобретения данная волна соответствует импульсной реакции первой крутильной моды ротора.
Согласно первому варианту первая крутильная мода ротора является «характерной» модой; причем характеристики (частота, ослабление) первой крутильной моды измеряются непосредственно на роторе низкого давления, на котором будет осуществляться обнаружение попадания; причем обнаружение осуществляется, таким образом, «индивидуально» при помощи вибрационной импульсной реакции первой крутильной моды ротора в качестве эталонной резонансной волны. Определение параметров способа обнаружения при помощи характерной моды позволяет осуществлять точное обнаружение, приспособленное к упомянутому ротору низкого давления. Действительно, каждый ротор обладает импульсной реакцией своей первой крутильной моды, которая ему свойственна. Иначе говоря, различные модели ротора обладают различными импульсными реакциями.
Согласно второму варианту импульсная реакция первой крутильной моды ротора определена аналитически-расчетным путем.
Согласно второму варианту эталонная резонансная волна e(t) соответствует сумме множества крутильных мод одного и того же ротора низкого давления, предпочтительно двум или трем первым крутильным модам ротора низкого давления. Эталонная резонансная волна e(t), содержащая несколько крутильных мод, позволяет повысить надежность обнаружения и его точность.
Например, для производства сравнения получают произведение сверток между динамической реакцией ротора низкого давления Rd(t) и эталонной волной e(t) для получения показателя попадания TING.

Разумеется, что также могли бы подойти и другие алгоритмы сравнения. Предпочтительно, параметры алгоритмов сравнения определены для учета искажения эталонной резонансной волны (задержка, шум и т.д.).
Показатель попадания TING, изображенный на фиг. 4, позволяет определить сомнительное колебание 2, выявленное при измерении режима ротора низкого давления R(t). Чем больше динамическая реакция ротора низкого давления Rd(t) совпадает с теоретической импульсной реакцией, характерной для реакции на удар (в данном случае - попадание инородного тела), тем выше будет значение показателя попадания TING.
После расчета показателя попадания TING он сравнивается с порогом обнаружения S определенной величины, при этом сигнал тревоги о попадании подается, когда показатель попадания TING превышает упомянутый порог обнаружения S.
Величина обнаружения S определена таким образом, чтобы не формировать сигнал тревоги для величин показателя TING, соответствующих нормальной работе двигателя и чтобы определить шум. Данный порог обнаружения, таким образом, достигается путем применения допустимого предела на среднем уровне «шума» Sb. Этот допустимый предел зависит от характеристик сигнала «шум», а также от уровня желаемой надежности обнаружения. Как это показано на фиг. 4, допустимый предел в 70% отделяет порог обнаружения от среднего уровня шума.
Этот способ является выборочным, поскольку показатель попадания TING для шумового сигнала (вне попадания) является слабым, т.к. в случае отсутствия попадания импульсная реакция первой крутильной моды не присутствует в сигнале. Шумовой сигнал не похож на импульсную реакцию первой крутильной моды.
После обнаружения попадания сформированный сигнал тревоги может быть или направлен непосредственно пилоту летательного аппарата, на котором установлен двигатель, для изучения в реальном масштабе времени, или храниться в памяти для изучения в последующем, например, при осмотре двигателя, или передаваться в реальном масштабе времени в сервисную службу авиационной компании для того, чтобы позволить ей предусмотреть и организовать во время ближайшей промежуточной посадки детальный осмотр двигателя, в котором произошло столкновение, и любые другие необходимые действия по техническому обслуживанию.
Понятно, что могут быть установлены различные пороги сигнала тревоги для того, чтобы отличать различные виды попадания (более или менее энергетические попадания, более или менее серьезные попадания).
В данном случае приведено описание изобретения для двухвального турбинного двигателя, однако понятно, что изобретение применяется аналогичным образом и к двигателю с одним и более двух роторами.
Способ автоматизированного обнаружения попадания, по меньшей мере, одного инородного тела в газотурбинный двигатель, содержащий ротор, согласно которому: измеряют мгновенный режим ротора (R(t)); фильтруют сигнал режима ротора R(t) для разделения его статической составляющей (Rs(t)) от его динамической составляющей (Rd(t)); сравнивают отфильтрованную динамическую составляющую (Rd(t)) с эталонной резонансной волной (e(t)) ротора для получения показателя попадания (TING), причем эталонная резонансная волна (e(t)) соответствует вибрационной импульсной реакции ротора; сравнивают полученный показатель попадания (TING) с порогом обнаружения (S); подают сигнал обнаружения попадания инородного тела, когда показатель попадания (TING) выше порога обнаружения (S). Технический результат изобретения - повышение точности и надежности обнаружения попадания инородного тела. 5 з.п. ф-лы, 4 ил.
1. Способ автоматизированного обнаружения попадания, по меньшей мере, одного инородного тела в газотурбинный двигатель, содержащий ротор, способ, согласно которому:
измеряют мгновенный режим ротора (R(t));
фильтруют сигнал режима ротора R(t) для разделения его статической составляющей (Rs(t)) от его динамической составляющей (Rd(t));
сравнивают отфильтрованную динамическую составляющую (Rd(t)) с эталонной резонансной волной (e(t)) ротора для получения показателя попадания (TING), причем эталонная резонансная волна (e(t)) соответствует вибрационной импульсной реакции ротора;
сравнивают полученный показатель попадания (TING) с порогом обнаружения (S);
подают сигнал обнаружения попадания инородного тела, когда показатель попадания (TING) выше порога обнаружения (S).
2. Способ по п. 1, в котором эталонная резонансная волна (e(t)) ротора соответствует импульсной реакции первой крутильной моды ротора.
3. Способ по п. 2, в котором эталонную резонансную волну (e(t)) определяют теоретически в зависимости от характеристик импульсной реакции первой крутильной моды ротора.
4. Способ по п. 2, в котором эталонную резонансную волну (e(t)) измеряют непосредственно на роторе двигателя, на котором осуществляется способ обнаружения.
5. Способ по п. 1, в котором получают произведение сверток между отфильтрованной динамической составляющей (Rd(t)) и эталонной резонансной волной (e(t)).
6. Способ по п. 1, в котором ротор является ротором низкого давления газотурбинного двигателя, причем сравнивают отфильтрованную динамическую составляющую (Rd(t)) с эталонной резонансной волной (e(t)) ротора низкого давления для получения показателя попадания (TING), причем эталонная резонансная волна (e(t)) соответствует вибрационной импульсной реакции ротора низкого давления.
| ГИДРОДИНАМИЧЕСКИЙ КАВИТАТОР | 2023 |
|
RU2840358C1 |
| EP1312766A2,21.05.2003 | |||
| Прибор, замыкающий сигнальную цепь при повышении температуры | 1918 |
|
SU99A1 |
| СПОСОБ КОНТРОЛЯ КАЧЕСТВА ДИЭЛЕКТРИЧЕСКИХ ПОКРЫТИЙ НА ИЗДЕЛИЯХ ИЗ ЭЛЕКТРОПРОВОДНЫХ МАТЕРИАЛОВ | 0 |
|
SU284392A1 |
| СПОСОБ ДИАГНОСТИКИ ГАЗОТУРБИННЫХ ДВИГАТЕЛЕЙ ПРИ ПОПАДАНИИ ПОСТОРОННИХ ПРЕДМЕТОВ НА ИХ ВХОД | 2007 |
|
RU2348911C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ВЕЛИЧИНЫ ОБРАТНОЙ ТЯГИ ГАЗОТУРБИННЫХ ДВИГАТЕЛЕЙ НА ПРОБЕГЕ ЧЕТЫРЕХДВИГАТЕЛЬНОГО САМОЛЕТА ПРИ ИСПОЛЬЗОВАНИИ РЕВЕРСА ТЯГИ ДВУХ ВНУТРЕННИХ ДВИГАТЕЛЕЙ | 2007 |
|
RU2367811C2 |

