ОБЛАСТЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к способу демпфирования колебаний прилипания-проскальзывания в бурильной колонне, способу бурения ствола скважины, способу расчета мгновенной скорости вращения компоновки низа бурильной колонны, бурильному механизму для использования в бурении ствола скважины, электронному регулятору для использования с бурильным механизмом и способу модернизации бурильного механизма на буровой установке.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
Бурение нефтяной и/или газовой скважины включает в себя создание ствола скважины значительной длины, часто в несколько километров по вертикали и/или горизонтали до начала добычи. Бурильная колонна содержит буровое долото на своем нижнем конце и звенья бурильной трубы, свинченные вместе. Бурильную колонну, в целом, вращает бурильный механизм на поверхности, колонна, в свою очередь, вращает долото для проходки ствола скважины. Бурильный механизм обычно является верхним приводом или ротором, каждый из них является, по существу, тяжелым маховиком, соединенным с верхом бурильной колонны. Бурильная колонна является чрезвычайно гибкой конструкцией относительно длины ствола скважины, и во время бурения колонна перекручивается на несколько оборотов под действием крутящего момента на долоте, составляющем между около 500 и 10000 Нм. Бурильная колонна также демонстрирует сложные динамические эволюции, содержащие осевые, поперечные и крутильные вибрации. Одновременные измерения параметров бурового вращения на поверхности и на долоте выявляют, что бурильная колонна часто ведет себя, как крутильный маятник, т.е. верх бурильной колонны вращается с постоянной угловой скоростью, тогда как буровое долото выполняет вращение с изменяющейся угловой скоростью, содержащей постоянную составляющую и наложенную крутильную вибрацию. В экстремальных случаях крутильная составляющая становится такой большой, что долото периодически полностью останавливается, в это время крутящий момент на бурильной колонне увеличивается до момента неожиданного возобновления вращения долота с угловой скоростью, значительно превышающей угловую скорость, измеренную на поверхности. Такое явление известно, как прилипание-проскальзывание.
Прилипание-проскальзывание изучают более двух десятилетий и считают основным источником таких проблем, как чрезмерный износ долота, преждевременные отказы инструмента и низкая скорость бурения. Одной причиной данного являются высокие максимальные скорости, возникающие во время фазы проскальзывания. Высокие скорости вращения, в свою очередь, приводят к вторичным эффектам, таким как экстремальные осевые и поперечные ускорения и силы. Большое число материалов и статей посвящено решению проблем прилипания-проскальзывания. Много материалов фокусируется на детектировании перемещения прилипания-проскальзывания и на регулировании колебаний рабочим средством, таким как добавление понизителей трения в буровой раствор, изменение скорости вращения или осевой нагрузки на долото. Хотя данные средства иногда помогают, они либо недостаточны или создают высокие дополнительные затраты.
В нескольких материалах также рекомендуют применение управления с элементами искусственного интеллекта верхним приводом для демпфирования и предотвращения колебаний прилипания-проскальзывания. В документе SPE 18049 Международной ассоциации буровых подрядчиков показано, что параметры крутящего момента, передаваемые по каналу обратной связи от выделенного датчика крутящего момента на колонне, могут эффективно обеспечивать подавление колебаний прилипания-проскальзывания посредством регулирования скорости в ответ на измерения изменений крутящего момента. В материале Jansen. J.D et al. "Active Damping of Self-Excited Torsional Vibrations in Oil Well Drillstrings", 1995, Journal of Sound и Vibrations, 179(4), 647-668, изложено, что недостатком данного подхода является необходимость новых и прямых измерений крутящего момента на колонне, по которым нет данных. Патент США 5117926 раскрывает такие измерения, как другой тип обратной связи, на основе тока двигателя (крутящего момента) и скорости. Данная систем производится и поставляется много лет под торговой маркой SOFT TORQUE®. Главный недостаток данной системы заключается в том, что она является каскадной системой управления, использующей обратную связь по крутящему моменту последовательно с жестким регулятором скорости. Это увеличивает риск нестабильности при частотах выше частоты прилипания-проскальзывания.
Документ SPE 28324 под названием "Application of High Sampling Rate Downhole Measurements for Analysis and Cure of Stick-Slip in Drilling" раскрывает управление процессом бурения с использованием оборудования привода, включающего в себя пропорционально-интегрально-дифференциальный регулятор (ПИД-регулятор), двигатель, коробку передач и ротор. ПИД-регулятор стремится поддерживать необходимую скорость вращения бурильной колонны, и предложена возможность настройки ПИД-регулятора для предотвращения прилипания-проскальзывания. Вместе с тем, результат имитации показывает слабое демпфирование колебаний прилипания-проскальзывания, и в материале дано заключение, что ПИД-регулятор является слишком простой системой сервоуправления для предотвращения прилипания-проскальзывания.
Наша одновременно находящаяся на рассмотрении патентная заявка описывает способ демпфирования колебаний прилипания-проскальзывания с максимальным демпфированием, имеющим место на первой или основной моде колебаний прилипания-проскальзывания (т.е. на низшей частоте) или вблизи нее. При разработке способа нами идентифицирована дополнительная проблема, подлежащая решению, когда бурильная колонна является экстремально длинной (более около 5 км), и основной период колебаний прилипания-проскальзывания превышает около 5 или 6 с. Хотя способ предшествующей патентной заявки способен устранять основную моду колебаний прилипания-проскальзывания в таких колоннах, как только данные колебания демпфированы, вторая естественная мода стремится стать нестабильной и вырасти в амплитуде до развития полного прилипания-проскальзывания на более высокой частоте. В некоторых имитациях мы нашли, что данная вторая мода имеет естественную частоту, приблизительно в три раза выше, чем основная частота прилипания-проскальзывания. Колебания прилипания-проскальзывания более высокого порядка отличаются коротким периодом и высокой амплитудой циклических изменений крутящего момента на валу привода. Имитации показывают, что скорость вращения долота также в данном случае меняется от нуля до максимальных скоростей, в два раза превышающих среднюю скорость.
Нами также обнаружено, что способ, примененный в упомянутой выше системе SOFT TORQUE® имеет аналогичную проблему. Ни один из способов не может подавлять обе, первую и вторую моды колебаний прилипания-проскальзывания.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Аспекты настоящего изобретения основаны на представлении, что пропорционально-интегральный (ПИ) или пропорционально-интегрально-дифференциальный (ПИД) - регулятор можно фактически использовать для получения значительного демпфирования колебаний прилипания-проскальзывания бурильным механизмом. В частности, получено понимание, что ПИ или ПИД-регулятор может быть настраиваемым для обеспечения демпфирования энергии крутильных волн на частоте прилипания-проскальзывания или вблизи нее. Дополнительное представление, на котором основаны некоторые варианты осуществления, состоит в том, что как основную, так и одну или несколько из высших мод (например, вторую естественную моду и больше) колебаний, можно также демпфировать посредством уменьшения действующего момента инерции бурильного механизма, что может быть достигнуто несколькими различными путями. Одним таким путем является дополнительная корректировка ПИ или ПИД-регулятора. Другим путем является изменение бурильного механизма с повышением передачи. В некоторых вариантах осуществления основную и одну или несколько высших мод можно демпфировать избирательно, либо заранее принятым компьютерным решением (например, использующим прогнозы на основе геометрии колонны). В других вариантах осуществления демпфирование можно избирательно включать в работу посредством мониторинга периода основной моды и применением способа, когда период основных колебаний превосходит некоторый порог.
В отличие от некоторых более ранних систем настоящее изобретение является пассивным в том смысле, что ни крутящий момент на колонне, ни крутящий момент на валу не нужны в петле обратной связи. Соответственно, демпфирование можно получать без создания дополнительных датчиков для измерения крутящего момента колонны, в ином случае увеличивающего сложность и стоимость.
Другие аспекты изобретения основаны на представлении о возможности расчета мгновенной скорости вращения долота (игнорируя любой вклад от устанавливаемых, если необходимо, гидравлических забойных двигателей) и возможности сделать данную информацию доступной для других процессов управления на буровой установке и/или бурильщику через пульт. При повторении способа, по существу, расчет скорости долота в режиме реального времени может быть создан. Создание таких данных может помогать бурильщику и/или автоматизированному способу управления бурением определять, улучшит ли аспект настройки ПИ изобретения показатели бурения, например, уменьшит ли прилипание/проскальзывание.
Согласно некоторым аспектам настоящего изобретения создан способ демпфирования колебаний прилипания-проскальзывания в бурильной колонне, содержащий следующие этапы:
а) демпфирование колебаний прилипания-проскальзывания с использованием бурильного механизма, расположенного в верхней части бурильной колонны;
б) регулирование скорости вращения бурильного механизма с использованием пропорционально-интегрального регулятора, отличающийся тем, что содержит следующие этапы:
в) настройка пропорционально-интегрального регулятора так, что бурильный механизм поглощает большую часть крутильной энергии от бурильной колонны на частоте, равной или близкой основной частоте колебаний прилипания-проскальзывания;
г) уменьшение действующего момента инерции бурильного механизма, при этом демпфирующий эффект бурильного механизма увеличивается для частот выше основной частоты колебаний прилипания-проскальзывания.
Колебания прилипания-проскальзывания могут содержать крутильные волны, распространяющиеся по бурильной колонне, и этап (в) содержит корректировку параметра I пропорционально-интегрального регулятора в зависимости от приблизительного периода основной частоты колебаний прилипания-проскальзывания и от действующего момента инерции бурильного механизма, при этом бурильный механизм имеет зависящий от частоты коэффициент отражения крутильных волн, по существу, минимальный на основной частоте колебаний прилипания-проскальзывания или вблизи нее.
Способ может дополнительно содержать этап корректировки параметра I согласно формуле: 
Этап уменьшения действующего момента инерции бурильного механизма может содержать настройку пропорционально-интегрального регулятора с дополнительным параметром крутящего момента, пропорциональным угловому ускорению бурильного механизма.
Способ может дополнительно содержать этап умножения углового ускорения бурильного механизма на компенсационный момент (Jc) инерции, регулируемый для контроля величины уменьшения действующего момента инерции бурильного механизма. Компенсационный момент инерции может уменьшать действующий момент инерции бурильного механизма на 0-80%.
Способ может дополнительно содержать этап корректировки параметра I согласно формуле:
Бурильный механизм может иметь ширину полосы поглощения крутильной энергии для рабочих частот колебаний прилипания-проскальзывания бурильной колонны, при этом величина указанной ширины полосы поглощения получена из половины максимума его полной ширины, и при уменьшении действующего момента инерции бурильного механизма величина половины максимума полной ширины является большей.
Бурильный механизм может иметь кривую демпфирования в зависимости от частоты, имеющую точку максимального демпфирования, и способ дополнительно содержит этап смещения указанной точки к более высоким частотам, при этом демпфирующий эффект бурильного механизма на, по меньшей мере, части более высоких частот увеличивается, и демпфирование основной частоты колебаний прилипания-проскальзывания уменьшается. Этап смещения точки максимального демпфирования к более высоким частотам может содержать определение параметра I пропорционально-интегрального регулятора согласно формуле:
Способ может дополнительно содержать этап дальнейшего уменьшения действующего момента инерции бурильного механизма при осуществлении указанного этапа смещения, при этом предотвращая сужение ширины полосы поглощения демпфирующей кривой.
Способ может дополнительно содержать этап дальнейшего уменьшения действующего момента инерции бурильного механизма и увеличение указанного периода на один и тот же коэффициент.
Этап уменьшения действующего момента инерции бурильного механизма может содержать переключение на более высокую передачу бурильного механизма.
Этапы а)-г) могут осуществляться после этапа мониторинга бурильного механизма при обнаружения появления, по меньшей мере, одной более высокой моды колебаний.
Способ может дополнительно содержать этапы мониторинга периода основной частоты, сравнение указанного периода с пороговым периодом и при превышении порогового периода уменьшение действующего момента инерции при увеличении указанного периода.
Согласно изобретению создан способ бурения ствола скважины, содержащий следующие этапы:
а) вращение бурильной колонны с бурильным механизмом для вращения бурового долота на нижнем конце бурильной колонны и прохождения поверхности Земли;
б) при обнаружении колебаний прилипания-проскальзывания бурильной колонны демпфирование указанных колебаний согласно вышеуказанному способу.
Согласно изобретению создан бурильный механизм для использования в бурении ствола скважины, содержащий электронный регулятор, имеющий пропорционально-интегральный регулятор и запоминающее устройство, сохраняющее исполняемые компьютером инструкции, при исполнении которых бурильный механизм способен демпфировать колебания прилипания-проскальзывания бурильной колонны согласно этапам вышеуказанного способа.
В бурильном механизме пропорционально-интегральный регулятор может содержать пропорционально-интегрально-дифференциальный регулятор, выполняющий следующее условие: Jc*dΩ/dt, где Jc - регулируемый пользователем или компьютером компенсационный момент инерции, и Ω - измеренная угловая скорость бурильного механизма.
Согласно изобретению создан электронный регулятор для использования с бурильным механизмом для бурения ствола скважины, содержащий пропорционально-интегральный регулятор и запоминающее устройство, сохраняющее исполняемые компьютером инструкции, при исполнении которых электронный регулятор способен контролировать бурильный механизм для демпфирования колебаний прилипания-проскальзывания бурильной колонны согласно этапам вышеуказанного способа.
Согласно изобретению создан способ модернизации бурильного механизма на буровой установке, содержащий этапы загрузки исполняемых компьютером инструкций в электронный регулятор на буровой установке, причем электронный регулятор предназначен для регулирования действия бурильного механизма, при этом исполняемые компьютером инструкции содержат инструкции для выполнения вышеуказанного способа.
Некоторые варианты осуществления данного изобретения не ограничены конкретными индивидуальными признаками, раскрытыми здесь, но включают в себя их комбинации с конструкциями, функциями и/или получаемыми результатами, отличающимися от известного уровня техники. Признаки изобретения описаны в широком смысле для лучшего понимания следующего подробного описания и для лучшей ясности вклада данного изобретения в технику. Имеются, естественно, дополнительные аспекты изобретения, описанные ниже, которые могут включать в себя объекты формулы данного изобретения. Специалистам в данной области техники, воспользовавшимся выгодами данного изобретения, его идеями и предложениями должно быть ясно, что концепции данного изобретения можно использовать как основу разработки других конструкций, способов и систем для осуществления и практического применения настоящего изобретения. Формулу данного изобретения следует читать как включающую в себя любые юридически эквивалентные устройства или способы, не отходящие от сущности и объема настоящего изобретения.
Настоящее изобретение рассматривает и решает вышеупомянутые проблемы и давно назревшие потребности и создает решение данных проблем и удовлетворяет данным потребностям в различных возможных вариантах осуществления и их эквивалентах. Специалистам в данной области техники, воспользовавшимся выгодами данного изобретения, вариантами реализации, идеями, описаниями и предложениями, другими целями и преимуществами, должны стать ясны из следующего описания некоторые предпочтительные варианты осуществления, приведенные с целью раскрытия изобретения в соединении с прилагаемыми чертежами. Детали данного описания не противоречат задаче заявки настоящего изобретения вне зависимости от изменений формы, других изменений или добавления дополнительных улучшений.
Должно быть понятно, что различные варианты осуществления настоящего изобретения могут включать в себя одно, несколько или все раскрытые, описанные и/или перечисленные в формуле изобретения улучшения и/или технические преимущества и/или элементы в формуле данного изобретения.
КРАТКОЕ ОПИСАНИЕ ФИГУР
Для лучшего понимания настоящего изобретения ниже даны ссылки, только в качестве примера, на прилагаемые чертежи, на которых показано следующее.
На фиг.1 показан схематичный вид сбоку буровой установки, использующей способ согласно настоящему изобретению.
На фиг.2 показана блок-схема ПИД-регулятора, содержащего регулятор скорости согласно настоящему изобретению.
На фиг.3 показан график частоты в зависимости от коэффициента отражения, дающий сравнение бурильного механизма, использующего первый вариант осуществления регулятора скорости согласно настоящему изобретению, и стандартного регулятора скорости.
На фиг.4А' и 4А'' показан снимок экрана первого окна, находящегося на пульте управления бурильщика для выполнения и регулирования способа согласно настоящему изобретению.
На фиг.4В' и 4В'' показан снимок экрана второго окна, находящегося на пульте управления бурильщика, иллюстрирующий крутящий момент на валу привода в режиме реального времени и расчет скорости вращения в скважине компоновки низа бурильной колонны фиг.1.
На фиг.5 и 6 показаны графики, иллюстрирующие результаты компьютерной имитации, моделирующей первый способ согласно настоящему изобретению.
На фиг.7 и 8 показаны графики, иллюстрирующие результаты испытания способа согласно настоящему изобретению.
На фиг.9 показан график нормализованных частот относительно нормализованного момента инерции КНБК.
На фиг.10 показан график первых трех мод крутильных колебаний бурильной колонны.
На фиг.11 показан график частоты в зависимости от коэффициента отражения, дающий сравнение между бурильным механизмом, использующим стандартный регулятор скорости, первый вариант осуществления регулятора скорости согласно настоящему изобретению и второй вариант осуществления регулятора скорости согласно настоящему изобретению.
На фиг.12 график частоты в зависимости от коэффициента отражения показывает аспект отстройки второго варианта осуществления настоящего изобретения.
На фиг.13 график, аналогичный графику фиг.11, показывает действие задержки и фильтра низких частот на регулятор скорости согласно второму варианту осуществления.
На фиг.14 показаны графики, иллюстрирующие результаты компьютерной имитации для моделирования второго способа согласно настоящему изобретению.
На фиг.15 показан график частоты в зависимости от коэффициента отражения третьего варианта осуществления способа демпфирования колебаний прилипания-проскальзывания согласно настоящему изобретению.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНОГО ВАРИАНТА ОСУЩЕСТВЛЕНИЯ
На фиг.1 буровая установка 10 управляет буровой работой с использованием бурильной колонны 12, содержащей звенья бурильной трубы 14, последовательно свинченные вместе. Буровая установка 10 может являться любым видом буровой установки для нефтепромысла общего назначения, бурения горнодобывающих или геотермальных объектов, включающей в себя: плавучие и наземные буровые установки, передвижные и буровые установки наклонного бурения, буровые установки на погружных, полупогружных платформах, на выдвигающихся опорах и буровых судах. Типичная бурильная колонна имеет длину 0-5 км и имеет в самой нижней части ряд утяжеленных бурильных труб или толстостенных бурильных труб (ТБТ). Утяжеленные бурильные трубы имеют более толстые стенки, чем бурильная труба для противодействия выпучиванию под действием сжимающих сил: бурильная труба может иметь внешний диаметр 127 мм и толщину стенки 9 мм, тогда как утяжеленная бурильная труба может иметь внешний диаметр до 250 мм и толщину стенки 85 мм, например.
Компоновка 16 низа бурильной колонны (КНБК) установлена на нижнем конце бурильной колонны 12. Типичная КНБК 16 содержит передатчик 18 измерений во время бурения (который может, например, представлять собой кабельную систему телеметрии, систему телеметрии по пульсациям бурового раствора, электромагнитную систему телеметрии, акустическую систему телеметрии или систему телеметрии по кабелированным трубам), центраторы 20, инструмент 22 для наклонного бурения (который может быть установлен в зонде или утяжеленной бурильной трубе), центратор с жесткими лопастями (фиксированными или подвижными) и буровое долото 28, которое при использовании вращается верхним приводом 30 через бурильную колонну 12.
Буровая установка 10 содержит бурильный механизм 30. Функцией бурильного механизма 30 является вращение бурильной колонны 12 и при этом долота 28 на нижнем конце. В настоящее время большинство буровых установок используют верхние привода для вращения бурильной колонны 12 и долота 28 для осуществления бурения. Вместе с тем, некоторые буровые установки используют ротор, и изобретение является одинаково применимым к таким буровым установкам. Изобретение является также одинаково применимым для бурения любых видов стволов скважин, например, прямых, наклонно-направленных, горизонтальных или вертикальных.
Насос 32 размещен на поверхности и при использовании перекачивает буровой раствор через бурильную колонну 12 и через буровое долото 28 и служит для охлаждения и смазки долота во время бурения и подачи шлама на поверхность в кольцевом пространстве, образованном между бурильной колонной и стволом скважины (не показано).
Данные бурения и нужная информация отображаются на пульте 34 управления бурильщика, содержащем сенсорный экран 36 и устройство управления пользователя, например клавиатуру (не показано) для регулирования, по меньшей мере, некоторой части процесса бурения. Цифровой программируемый логический контроллер (ПЛК) 38 передает данные на пульт 34 и верхний привод 30 и принимает от них. В частности, бурильщик имеет возможность устанавливать команды управления скоростью и ограничение крутящего момента для верхнего привода для управления скоростью вращения бурового долота 28.
На фиг.2 показан ПЛК 38, содержащий энергонезависимую память 40 на базе флэш-технологии (или другое запоминающее устройство, такое как оперативная память с резервным питанием от батареи). Запоминающее устройство сохраняет исполняемые компьютером инструкции, при исполнении которых выполняются функции регулятора 42 скорости для верхнего привода 30. Регулятор 42 скорости содержит ПИ-регулятор с противодействием скручиванию, функционирующий, как описано более подробно ниже. В данном варианте осуществления регулятор 42 скорости является отдельным и отличным от верхнего привода 30. Вместе с тем, является возможным создание такой функциональности регулятора скорости, как описанная в данном документе, с частью встроенного специального выделенного регулятора скорости верхнего привода. Такую встроенную функциональность можно либо создавать на месте изготовления или она может являться частью обновления программного обеспечения, выполняемого на верхнем приводе, либо на площадке, или вне площадки работ. В других вариантах осуществления ПЛК может являться аналоговым ПЛК.
Настройка регулятора пропорционально-интегрального типа (ПИ-регулятора)
Бурильную колонну 12 можно рассматривать как линию передачи для крутильных волн. Изменение момента трения на буровом долоте 28 или в других местах вдоль колонны генерирует крутильную волну, которая распространяется вверх и частично отражается на геометрических перегибах. Когда переданная волна достигает верхнего привода 30, она частично отражается назад в бурильную колонну 12. Для верхнего привода с высоким моментом инерции и/или жесткого регулятора скорости отражение является почти полным, при котором очень мало энергии поглощает верхний привод.
Для количественного определения, созданного верхним приводом демпфирования, можно получить следующий комплексный коэффициент отражения r для крутильных волн на стыке бурильная колонна/верхний привод:

где ζ - характеристический импеданс для крутильных волн и Z импеданс верхнего привода. Характеристический импеданс пропорционален полярному моменту инерции сечения трубы и изменяется приблизительно как диаметр трубы в четвертой степени. Отмечаем, что коэффициент отражения является комплексной функцией, где, в общем, как величина, так и фаза изменяются с частотой. Если регулирование скорости является жестким (т.е. 
Комплексное представление импеданса верхнего привода можно вывести следующим образом. Если противодействием скручиванию регулятора скорости пренебречь (то есть нелинейной функцией, ограничивающей крутящий момент), крутящий момент на валу верхнего привода 30 можно выразить, как:

где Р и I - соответствующие долевой коэффициент и коэффициент интегрирования регулятора скорости, и Ω - фактическая скорость на выходе привода (в рад/с) и Ωset - уставка скорости привода (в рад/с). Крутящий момент на валу является фактически суммой крутящих моментов двигателя, умноженной на передаточное отношение ng (скорость двигателя/скорость на выходе, >1). Заметим, что регулирование скорости здесь относится к выходной оси верхнего привода. Более обычным для регулирования скорости является привязка к оси двигателя; в таком случае, соответствующие значения Р и I для регулирования скорости двигателя меньше приведенных выше с учетом делителя 
Пренебрегая потерями при передаче, уравнение движения вала на выходе верхнего привода:

где J - действующий момент инерции верхнего привода (включающего в себя редуктор и приводные двигатели) и Т - внешний крутящий момент от колонны. Объединение уравнений (2) и (3) и применение преобразования Фурье дает следующее уравнение движения:

Для упрощения, использованы одинаковые с уравнениями по времени обозначения переменных, хотя Ω, Ωset и Т теперь представляют комплексные амплитуды. Неявно подразумеваемый зависящий от времени множитель составляет exp(iωt), где i=√-1 мнимая единица и ω=2πf угловая частота верхнего привода 30. Если предположить, что отсутствует каскадная обратная связь через установленную скорость (как в системах с обратной связью по крутящему моменту), амплитуда установленной скорости сводится к нулю и приведенное выше уравнение упрощается:

Отрицательное соотношение - T/Ω называют импедансом Z верхнего конца колонны:

Данный импеданс можно легко обобщить для идеального пропорционально-интегрально-дифференциального регулятора (ПИД регулятора) добавлением к нему нового параметра iωD, где D производная регулятора. Положительный (нормальный) параметр D должен увеличивать действующий момент инерции верхнего привода, а отрицательный коэффициент должен ее уменьшать. На практике, поскольку дифференцирование по времени измеренной скорости является основным процессом шума увеличивающим высокочастотный шум, параметр D в ПИД-регуляторе нормально объединяют с фильтром нижних частот. Данный фильтр вводит сдвиг фаз, делающий действующий импеданс более сложным, и при этом увеличивает риск создания нарушений устойчивости на некоторых частотах, как описано ниже. Поэтому, хотя ПИД-регулятор с параметром D можно использовать для выполнения аспекта настройки изобретения, данное не рекомендуется.
Объединение уравнений (1) и (6) дает следующее выражение для коэффициента отражения, действительное для верхних приводов с регулированием скорости ПИ-регулятором:

Его величина имеет минимум, равный:

когда мнимые параметры обращаются в нуль, то есть когда угловая частота верхнего привода 30 равна ω=√I/J. Для стандартных жестких регуляторов скорости данная частота в нормальных условиях выше частоты прилипания-проскальзывания (см. фиг.3 и соответствующее описание). Вместе с тем мы сделали открытие, что корректировка параметра I ПИ-регулятора также корректирует максимальную частоту поглощения крутильных волн верхним приводом 30. В частности, параметр I можно корректировать так, что максимум поглощения энергии крутильных волн возникает на частоте ωs прилипания-проскальзывания или вблизи нее (т.е. когда величина коэффициента отражения минимальна) следующим образом:

Данная реализация является значительной поскольку, как первый этап для достижения хорошего демпфирования параметр I ПИ-регулятора является зависимым только от частоты прилипания-проскальзывания и действующего момента инерции верхнего привода 30. Поскольку действующий момент инерции легко определить либо перед проведением операции или из цифр, представленных изготовителем, и поскольку частоту прилипания-проскальзывания можно легко определить во время бурения, данное делает настройку ПИ-регулятора прямой, с достижением хорошего поглощения энергии колебаний прилипания-проскальзывания верхним приводом 30.
Данный первый этап настройки регулятора скорости является хорошим первым этапом на пути к эффективному демпфированию колебаний прилипания-проскальзывания. Вместе с тем, демпфирование можно дополнительно улучшить. В частности, ненастраиваемый параметр Р регулятора скорости все еще слишком высок, то есть Р>>ζ, что сохраняет коэффициент отражения близким к -1. Нами сделано открытие, что для получения достаточного демпфирования колебаний прилипания-проскальзывания параметр Р регулятора скорости должен быть уменьшен до величины одного порядка с величиной характеристического импеданса ζ. Вместе с тем, нами также сделано открытие, что нежелательно полное превращение в нуль коэффициента отражения, поскольку при этом должны радикально меняться динамические свойства бурильной колонны 12 и режим маятника должен разделяться на два новых режима, каждый с отличающейся частотой. Кроме того, экстремально мягкий регулятор скорости, абсорбирующий почти всю энергию падающей волны, должен обуславливать очень высокую скорость флуктуации верхнего привода 30 в ответ на изменения крутящего момента в скважине. Данное может уменьшать производительность бурения.
Нами сделано открытие, что параметр Р можно задавать как нецелое кратное число характеристического импеданса ζ бурильной колонны, которое можно выразить, как Р=ζ/а, где а - нормализованный коэффициент подвижности (безразмерный) меньше единицы, настраиваемый оператором или компьютером в некоторых пределах, как описано ниже. С установлением параметр I, обуславливающего сведение на нуль мнимой части уравнения (7), установление параметра Р, как описано, обуславливает минимум коэффициента отражения (т.е. максимум поглощения энергии верхним приводом) при частоте ωs прилипания-проскальзывания, становящимся:

Допуская настройку коэффициента подвижности а, количество энергии, отраженной назад в бурильную колонну 12, можно регулировать в некоторых пределах. Данные пределы устанавливают, допуская только некоторый диапазон значений а, такой как 0,05-0,33. Данное соответствует диапазону величины rmin от около 0,9 до 0,5. Считается, что данный диапазон обеспечивает такое регулирование демпфирования, что колебания прилипания-проскальзывания могут подавляться. Если регулятор скорости 42 гораздо более жесткий, чем данный (т.е. коэффициент отражения больше около 0,9), мы находим, что слишком много крутильной энергии колебаний прилипания-проскальзывания отражается назад в бурильную колонну 12. Кроме того, если регулятор скорости 42 является слишком мягким (т.е. коэффициент отражения меньше около 0,5), мы находим, что данное может повлиять на показатели бурения (например, в отношении скорости проходки).
Стандартный регулятор скорости выполнен с возможностью поддержания скорости двигателя постоянной и действительные постоянные Р и I относятся к оси двигателя. Типичный приводной двигатель с номинальной мощностью 900 КВт и моментом инерции ротора Jm=25 кгм2 обычно регулируют регулятором скорости двигателя с Pm=500 Нмс. Коэффициент I регулятора скорости наиболее часто задают не напрямую, как коэффициент Р, деленный на постоянную интегрирования по времени обычно τi=0,3 с. Как пример, примем привод с одним двигателем, соединенным с выходным валом редуктором с моментом инерции J=250 кгм2 и передаточным отношением ng=5,32. Действующий момент инерции привода тогда Jd=Jg+ng 2Jm=960 кгм2. Действующие коэффициенты регулятора скорости, относящиеся к выходному валу, аналогично P=ng 2Pm≈14000 Нмс и I=Р/τi≈47000 Нм. В сравнении, характеристический импеданс ζ≈340 Нмс для типичной трубы в 5 дюймов (127 мм), что составляет только 2,4% реальной части импеданса привода.
На фиг.3 показан график 48 величины коэффициента отражения 
Следует подчеркнуть тот факт, что в обоих случаях коэффициент отражения остается ниже 1, но приближается к данному пределу с приближением частоты либо к нулю или к бесконечности. Поэтому стандартный ПИ-регулятор никогда не создает отрицательного демпфирования, которое в ином случае усиливает компоненты крутильной вибрации. Вместе с тем, демпфирование является слабым на удалении от относительно узкой полосы поглощения на 1-2 Гц. По контрасту, настраиваемый ПИ-регулятор создает сравнительно широкую полосу поглощения с меньше 80% отражения между около 0,1 Гц и 0,4 Гц. Остается даже значительное демпфирование (
Действующий момент инерции J бурильного механизма, характеристический импеданс ζ и частота прилипания-проскальзывания ωs изменяют ширину полосы поглощения кривой частота-отражение фиг.3. В частности, ширина полосы поглощения обратно пропорциональна отношению ωsJ/ζ. Для бурильного механизма с большим действующим моментом инерции и/или гибкой бурильной трубой, делающими данное отношение больше (например, больше 5), ширина полосы поглощения уменьшается. В таком случае, становится более важным обеспечение более точного определения периода прилипания-проскальзывания (если возможно) так, что частота максимального демпфирования становится насколько возможно ближе фактической частоте прилипания-проскальзывания.
Уменьшение величины коэффициента отражения и соответствующее положительное демпфирование по всей полосе частот является очень важным и достигается только одним ПИ-регулятором. Данное является отличием от других активных способов, использующих каскадные петли обратной связи последовательно со стандартным регулятором скорости, или которые опираются на некоторые измеренные параметры, такие как крутящий момент на валу или на колонне для создания сигнала обратной связи на ПЛК. Фильтры, используемые в функциях обратной связи каскада, могут являться подходящими для демпфирования колебаний на основной частоте прилипания-проскальзывания но могут обуславливать отрицательное демпфирование и нарушения устойчивости на более высоких частотах.
На практике параметр Р для настраиваемого регулятора скорости можно определить следующим образом:
где G - модуль сдвига бурильной колонны (обычное значение 80×109 Нм-2), Ip - полярный момент инерции сечения бурильной колонны (обычное значение составляет 12,2×10-6 м4) и с - скорость крутильных волн в бурильной колонне (обычное значение составляет 3192 мс-1).
Для практического определения параметра I имеются две переменные, подлежащие расчету: (а) угловая частота ωs колебаний прилипания-проскальзывания и (б) действующий момент инерции J верхнего привода. Последний определяется относительно прямо и может либо быть подсчитан по теоретическим значениям момента инерции редуктора, или по передаточному отношению и моменту инерции ротора двигателя, или его можно найти опытным путем с проведением испытания ускорения, когда верхний привод 30 отсоединен от колонны. Обычная формула для подсчета момента инерции Jd верхнего привода выглядит так:
Jd=Jg+nmng 2Jm
где Jg - момент инерции верхнего привода с отсоединенным двигателем (обычное значение 100 кгм2), ng - передаточное отношение (>1), nm число активных двигателей (значение по умолчанию 1) и Jm - момент инерции ротора двигателя (обычное значение 25 кгм2).
Существует несколько путей расчета угловой частоты ωs, включающих в себя: (I) подсчеты по геометрии колонны, (II) по ручным измерениям (например, с использованием секундомера) и (III) автоматическое определение в программном обеспечении ПЛК. Важным преимуществом настройки ПИ-регулятора аспекта изобретения является то, что действие демпфирования колебаний прилипания-проскальзывания получают даже если расчет периода прилипания-проскальзывания, используемый для настройки ПИ-регулятора, не совсем точен. Например, на фиг.3 показано максимальное демпфирование, возникающее при частоте 0,2 Гц. Даже если реальная частота прилипания-проскальзывания ниже или выше данной частоты, все равно имеем хороший демпфирующий эффект (r~0,8), полученный между около 0,09 Гц и 0,4 Гц. Соответственно, способы, используемые для расчета периода прилипания-проскальзывания не обязательно должны быть особенно точными.
Геометрия колонны
Возможен теоретический подход к определению периода прилипания-проскальзывания с использованием параметров бурильной колонны имеющихся на площадке в журнале работ. Журнал работ ведется на площадке для каждой бурильной колонны и содержит подробные записи свойств каждой секции бурильной колонны (например, внешний диаметр, внутренний диаметр, тип трубы), определенной как отрезок длины (например, 300 м) бурильной трубы одного типа.
Предположим, далее, что бурильная колонна 12 состоит из секции отрезка длины 1 одной бурильной трубы с сосредоточенным импедансом долота на нижнем конце, представленным Zb. Данный импеданс может являться чистым реактивным импедансом момента инерции (iωJb, где Jb - момент инерции компоновки низа бурильной колонны) или он может являться вещественной постоянной, представляющей сосредоточенное демпфирование (положительное или отрицательное) на буровом долоте 28. Уравнения крутящего момента сверху и на долоте представляют два граничных условия. Можно показать, что данные два граничных условия можно записать как следующие матричные уравнения:

где k - волновое число и Zd - импеданс бурильного механизма.
Нетривиальные решения данной системы уравнений существуют, если детерминант системной матрицы приходит к нулю, то есть когда

Здесь коэффициенты отражения rd и rb на приводе и на компоновке низа бурильной колонны соответственно введены, как следующее:
Заметим, что коэффициент отражения верхнего привода rd≈-1 для жесткого регулятора скорости (
Корни уравнений (12) можно записать как:

где m - неотрицательное целое число и αd и αb - аргументы (фазовые углы) комплексных коэффициентов отражения rd и rb соответственно. Соответствующие угловые частоты резонанса составляют:

Поскольку, в общем, величины и фазы коэффициента отражения являются зависимыми от частоты, приведенное выше уравнение является трансцендентным, без конкретных аналитических решений. Вместе с тем, его можно решить количественно на персональном компьютере или другом компьютере.
Мнимый параметр приведенного выше уравнения представляет демпфирование собственных модов. Если 

Как пример рассмотрим случай с полностью жестким регулятором скорости (


Без дополнительного момента инерции компоновки низа бурильной колонны данное выражение уменьшается до ωs=πc/(2l). Заметим, что резонансная частота уменьшается с увеличением момента инерции Jb. В экстремальном случае, когда ωsJb>>ζ, приведенную выше формулу можно переписать как ωs≈1/√JbC, где C=l/(GIp) является статической податливостью колонны. Данная формула является хорошо известной формулой для собственной частоты сосредоточенного момента инерции и пружинной системы.
Нами найдено, что полезно изучение соотношения между амплитудой скорости нижнего конца Ωs=Ω(x=1) и соответствующим крутящим моментом сверху Ts≡T(x=0). Из приведенных выше уравнений можно показать, что данное соотношение составляет:

С использованием того факта, что характеристический импеданс можно записать, как ζ=kl/(ωC), амплитуду скорости скважины можно выразить как:

Отметим, что второй параметр приходит к нулю, если регулятор скорости является очень жестким (r≈-1) или когда kl≈π/2. Вместе с тем, если используют мягкий регулятор скорости и имеется высокий момент инерции вблизи долота, так что kl для частоты прилипания-проскальзывания значительно меньше π/2, тогда второй параметр может быть значительным и им не следует пренебрегать.
Теорию, изложенную выше, можно обобщить для колонн с множеством секций и также для случаев с распределенным демпфированием. Если линейный демпфирующий параметр включен в состав, обобщение обуславливает комплексные волновое число и характеристический импеданс и делает их не чисто вещественными. Если колонна состоит из n однородных секций, общее волновое решение состоит из 2n комплексных амплитуд скорости, представляющих пары распространяющихся вверх и вниз волн. Непрерывность угловой скорости и кручения по границам секции можно выразить посредством 2(n-1) внутренних граничных условий, дополняющих два концевых условия в уравнении (11). Данные условия можно устанавливать, как однородное 2n×2n матричное уравнение. Корни данной системы уравнений являются частотами, делающими матрицу системы сингулярной. Хотя возможно нахождение аналитического выражения для детерминанта системы, численные решения находит персональный компьютер или другой компьютер на площадке. IADC/SPE 15564 дает пример одного пути к данному решению, и его содержание включено в данный документ для всех целей в виде ссылки.
На фиг.4 показано типичное окно 50, имеющееся на пульте бурильщика, обеспечивающее бурильщику запуск ПК для расчета нового периода прилипания-проскальзывания на основе геометрии колонны. В частности, таблица 52 представляет секции бурильной колонны, включающие в себя КНБК, толстостенные бурильные трубы (ТБТ), и секции 1-6 бурильных труб. Имеющиеся поля для каждой секции следующие: длина, внешний диаметр и внутренний диаметр. Бурильщик первым определяет по журналу работ на сколько секций разделена бурильная колонна. В данном примере бурильная колонна имеет восемь секций. Для каждой секции бурильщик вводит цифры в три поля. Кнопка 54 обеспечивает бурильщику запуск расчета нового периода прилипания-проскальзывания на основе геометрии колонны, введенной в таблицу 52. В частности, таблица устанавливает матричное уравнение 2n×2n, упомянутое выше и ПЛК (не показано) использует численный способ для определения корней матрицы, делающей матрицу сингулярной. Наименьший корень является выходным значением 56 периода прилипания-проскальзывания в окне 50.
II. Ручной расчет
Для ручного определения периода прилипания-проскальзывания бурильщик может наблюдать крутящий момент на валу, отображенный на пульте 34 бурильщика, и определять период посредством измерения периода изменения крутящего момента на валу с помощью секундомера. Данное легко выполнить, поскольку каждый период обычно составляет 2-10 с. Альтернативный способ заключается в том, что бурильщик слушает изменения высоты звука двигателя верхнего привода и определяет период времени таким путем. Как упомянуто выше, такие способы должны быть достаточными, если расчетная частота прилипания-проскальзывания не должна быть особенно близкой реальной частоте прилипания-проскальзывания для демпфирования колебаний прилипания-проскальзывания.
III. Автоматический расчет
Автоматический расчет означает, что программное обеспечение ПЛК рассчитывает период прилипания-проскальзывания или частоту по измерениям, выполненным во время бурения. В частности, сигнал крутящего момента верхнего привода проходит через полосовой фильтр, пропускающий частоты в диапазоне 0,1-0,5 Гц (т.е. периода между 2 и 10 с), то есть фильтр отдает предпочтение компоненту прилипания-проскальзывания и подавляет все компоненты других частот. ПЛК затем детектирует период между каждым новым выходом за нулевой уровень пропущенного через фильтр сигнала крутящего момента и использует данные значения в фильтре рекурсивного сглаживания для получения стабильного и точного расчета периода. Фильтр окончательного сглаживания замораживают, когда-либо показатель интенсивности прилипания-проскальзывания (см. ниже) падает ниже нижнего критического значения, или с запуском способа настройки.
Для помощи расчетчику периода быстро найти точный период оператор может либо вводить реалистическое пусковое значение или подбирать теоретическое значение, подсчитанное для фактической колонны (определенное согласно разделу Геометрия колонны, приведенному выше).
При использовании настраиваемый ПИ-регулятор включают в работу, когда имеется значительное перемещение прилипания-проскальзывания (определенное бурильщиком или программным обеспечением). Вместе с тем, расчет частоты прилипания-проскальзывания (измерение периода) имеет место перед фактическим использованием настраиваемого ПИ-регулятора для управления бурильным механизмом. По завершении работы устройство расчета периода выключают, когда ПИ-регулятор включен, поскольку естественный период колебаний прилипания-проскальзывания может изменяться незначительно при использовании плавного регулирования скорости.
Необходимость очень частой повторной настройки расчетной частоты не возникает, поскольку естественная частота прилипания-проскальзывания изменяется медленно с длиной бурильной колонны. Хорошей идеей, вместе с тем, является автоматическое обновление периода при каждом наращивании, т.е. когда следующие 30 м бурильной трубы добавляют в бурильную колонну. Для выполнения данного возможно использование анализа теоретической чувствительности для прогнозирования увеличения периода прилипания-проскальзывания с увеличением длины бурильной колонны. Одним путем выполнения данного (но не только путем) является нахождение теоретических периодов для двух отрезков длины колонны (скажем, L и L+200 м) и затем использование интерполяции для нахождения увеличения, вызванного добавлением секции 30 м для обновления расчетного периода.
Расчет показателя интенсивности прилипания-проскальзывания и мгновенной скорости долота
В дополнительном аспекте изобретения создан набор исполняемых компьютером команд в программном обеспечении ПЛК, обеспечивающих количественную оценку изменений скорости долота и расчет мгновенной скорости вращения долота. «Скорость долота» означает скорость вращения КНБК, если исключен вклад, устанавливаемого, если необходимо, забойного гидравлического двигателя. Данный аспект изобретения можно создать отдельно от аспекта настройки ПИ-регулятора или в объединении с ним.
Данный расчет получают, объединяя известный коэффициент С крутильной податливости бурильной колонны и изменения крутящего момента на валу. В общем, поскольку крутящий момент не дает строго периодического сигнала, но часто обладает широким диапазоном частот, точный подсчет является экстремально сложным и поэтому не подходит для реализации в ПЛК. Вместе с тем, нам понятно, что поскольку в перемещении прилипания-проскальзывания доминирует основная частота прилипания-проскальзывания, возможно достижение весьма хороших расчетов на основе только данной частоты.
Выше приведено ключевое уравнение (17), описывающее хорошую аппроксимацию для комплексной амплитуды скорости, как функции крутящего момента сверху колонны. Два параметра в данном выражении должны обрабатываться различно, поскольку они представляют гармонические составляющие с разностью фаз 90 градусов. При этом мнимый коэффициент iωTs должен обрабатываться как производная по времени крутящего момента после пропуска через полосовой фильтр, вещественный параметр ωTs коэффициента можно аппроксимировать как произведение крутящего момента после пропуска через полосовой фильтр и частоты прилипания-проскальзывания. Поскольку полосовой фильтр подавляет все частоты, кроме частоты прилипания-проскальзывания, возможно замещение прямого интегрирования по времени аппроксимацией на основе интегрирования. Данная аппроксимация основана на том факте, что 

Здесь фазовый параметр kl=ωsl/c. В последней аппроксимации используют интегральную аппроксимацию для производной по времени, и второй параметр опускают.
Хотя формула, приведенная выше, выполнена на основе односекционной колонны, имитации показывают, что она также обеспечивает хорошие расчеты для многосекционных колонн, если используют суммарный коэффициент С податливости колонны:

Версия алгоритма, реализованного в ПЛК 38 для расчета как мгновенной скорости КНБК, так и показателя интенсивности прилипания-проскальзывания, содержит следующие этапы.
1. Расчет крутящего момента на колонне с корректировкой по действиям инерции (вычет действующего момента инерции двигателя, умноженного на угловое ускорение) и по использующемуся передаточному отношению для надлежащего масштабирования.
2. Пропуск через полосовой фильтр расчетного крутящего момента с центрированием полосового фильтра на наблюдаемой/расчетной частоте прилипания-проскальзывания. Фильтр должен являться фильтром второго порядка или выше, но может быть предпочтительно реализован в ПЛК как последовательность рекурсивных фильтров бесконечной импульсной характеристики (БИХ).
3. Подсчет общей статической податливости бурильной колонны с использованием уравнения (19) приведенного выше.
4. Подсчет фазового параметра kl=ωsl/c, где ωs - определенная угловая частота прилипания-проскальзывания.
5. Подсчет динамической скорости в скважине с использованием либо точной или приблизительной версии уравнения (18), приведенного выше.
6. Подсчет показателя а «интенсивности прилипания-проскальзывания», т.е. нормализованной амплитуды прилипания-проскальзывания, определяемого как отношение амплитуд динамической скорости в скважине к средней скорости вращения верхнего привода.
7. Нахождение мгновенной скорости, как суммы скорости верхнего привода после пропуска через фильтр низких частот и расчетной динамической скорости в скважине. Ограничение нулем, если расчетная скорость получается отрицательной.
8. Вывод данных для построения графика (например, частоты оборотов в минуту относительно времени), показанного на дисплее на пульте бурильщика, например.
9. Повторение этапов 1-8 для создания, по существу, расчета скорости вращения долота в режиме реального времени.
Предусмотрено, что данный способ можно выполнять там, где выводят только данные расчета скорости КНБК или только показатель интенсивности прилипания-проскальзывания.
В отношении этапа 6 возможным путем расчета показателя интенсивности прилипания-проскальзывания является использование следующей формулы, где LP() означает пропуск через фильтр низких частот:

Поскольку описанный выше способ учитывает коэффициент отражения, он применяется как для стандартного, так и для настраиваемого устройства регулирования скорости. Во время переходных режимов ускорения, когда скорость верхнего привода значительно меняется, устройство расчета является ненадежным и может давать большие погрешности. Тем не менее, мы считаем данный инструмент полезным для оценки условий в скважине как автоматически в программном обеспечении, так и с отображением для анализа бурильщиком.
Отношение амплитуды динамической скорости к средней скорости верхнего привода является прямым и количественным измерением перемещения прилипания-проскальзывания, более подходящим, чем как динамический крутящий момент, так и амплитуда относительного крутящего момента. Хотя расчетная скорость долота не имеет высокой точности, она дает ценные входные данные для мониторинга бурильщика по графику динамики ее развития, давая оператору более ясную информация по тому, что происходит на долоте.
Интерфейс пользователя
Интерфейс пользователя создан для пульта 34 бурильщика, содержащего графический интерфейс (см. фиг.4А' и 4А'' и 4В' и 4В'') дающий оператору прямую информацию о статусе прилипания-проскальзывания. Прилипание-проскальзывание показывают три различных индикатора: «светофорный» индикатор 58 на фиг.4А' с 3 уровнями прилипания-проскальзывания: зеленая лампочка для малых амплитуд (0-30%), желтая предупреждающая лампочка для значительной скорости колебаний (30-70%) и, наконец, красная лампочка для амплитуд выше расчетных. Данное процентное значение основано на показателе интенсивности прилипания-проскальзывания, определенном выше.
Показатель интенсивности прилипания-проскальзывания отражается на графике 62 крутящего момента относительно времени на фиг.4В, для наблюдения развития прилипания-проскальзывания в течение определенного периода времени.
Расчет мгновенной скорости долота на графике 64 мгновенной скорости долота относительно времени на фиг.4В дает визуальное и прямое отображение состояния прилипания-проскальзывания.
Как упомянуто выше, окно 50 требует от оператора ввода краткого описания колонны, в терминах упрощенного описания журнала работ. Данный журнал работ имеет до 8 разделов, указывающих длину, внешний диаметр и массу погонного метра. Данную информацию используют для подсчета как теоретической расчетной частоты для самой нижней моды, так и статическую податливость бурильной колонны на данной частоте.
Оператор может включать и выключать настраиваемый ПИ-регулятор. При его выключении используют стандартный регулятор скорости привода. Когда настройка включена, данный регулятор скорости шунтируется настраиваемым ПИ-регулятором 42, реализованным в ПЛК 38. Если регулятор привода в верхнем приводе 30 является современным цифровым регулятором, также возможно изменить сам регулятор скорости привода, вместо его шунтирования. Вместе с тем, если выбран способ шунтирования, данное достигается высокоскоростной передачей команд от ПЛК 38 на регулятор скорости в верхнем приводе 30 и динамическим регулированием ограничения выходного крутящего момента. В нормальном бурении данное ограничение крутящего момента используют, как ограничение по условиям безопасности для предотвращения повреждения колонны, если колонну неожиданно прихватывает. В режиме настраиваемого управления, когда ПЛК 38 динамически управляет ограничением крутящего момента, данное ограничение замещается соответствующим ограничением в программном обеспечении в ПЛК 38.
Оператор может также заменять коэффициент а защиты или подвижности в заданных пределах с помощью кнопок 60, обычно между 0,05 и 0,33. Высокий коэффициент предполагает более плавное регулирование скорости и меньшую возможность начала перемещения прилипания-проскальзывания или его продолжения. Недостатком высокого коэффициента являются более значительные флуктуации скорости верхнего привода в ответ на неприносящие вреда изменения уровня крутящего момента колонны. Может являться необходимым выбор высокого коэффициента для устранения интенсивных колебаний прилипания-проскальзывания, но оператор должен уменьшать коэффициент, когда восстанавливается плавное бурение.
Предусмотрено, что решение о включении и выключении настраиваемого регулирования скорости может принимать ПЛК 38 или другой электронный регулятор. Такой регулятор может осуществлять мониторинг мгновенных расчетов скорости долота, как изложено выше. Когда наблюдается рисунок прилипания-проскальзывания, регулятор может включить в работу настройку. Кроме того, регулятор может постепенно увеличивать подвижность или предотвращать увеличение мягкости верхнего привода 30, если величина колебаний прилипания-проскальзывания не уменьшается в течение заданного периода, например, 2 минуты. После уменьшения колебаний прилипания-проскальзывания или, по существу, их исчезновения, устройство управления может постепенно уменьшать коэффициент подвижности (например, до а=0,1) для улучшения производительности бурения.
Аппаратно-программное тестирование
Способ настройки ПИ-регулятора в последнее время широко испытывали в так называемых имитациях аппаратно-программного моделирования. В данных испытаниях программы ПЛК работают на физических ПЛК с интерфейсом имитационной модели привода и бурильной колонны.
Имитационная модель, используемая для аппаратно-программного тестирования способа настройки, имеет следующие признаки:
1. Привод моделируют как стандартный ПИ-регулятор скорости с крутящим моментом и ограничениями мощности и противодействием скручиванию. Регулятор крутящего момента или регулятор тока является совершенным в том смысле, что фактический крутящий момент принимают соответствующим установленному крутящему моменту без задержки.
2. Модель может обрабатывать данные множества приводных двигателей, соединенных с выходным валом посредством коробки передач.
3. Бурильную колонну моделируют как ряд элементов с сосредоточенным моментом инерции и пружинных элементов, выведенным из любого журнала работ. Длина звена, используемая в большинстве примеров, приведенных ниже, составляет приблизительно 28 м, что является обычной длиной тройной свечи. Следовательно, колонна длиной 3200 м, описанная ниже, состоит из 114 элементов.
4. Статический момент трения подсчитывают для каждого элемента на основе теоретической контактной силы, являющейся функцией веса и угла наклона, кривизны и натяжения. Действие осевой нагрузки на долото и крутящего момента на долоте также включают в состав.
5. Динамический, зависимый от скорости момент трения моделируют, как сумму трех параметров. Первый параметр является мягким вариантом кулоновского трения, второй представляет дополнительное статическое стартовое трение и третий является линейным демпфирующим параметром, независимым от контактных сил. Для имитации нестабильности с растущей амплитудой колебаний от плавного бурения данный коэффициент демпфирования должен быть отрицательным.
Модель была впервые разработана, как модель Simulink в условиях Matlab. Она была позже реализована с инструментарием Simulation Module в условиях National Instrument LabView и работала на платформе мощного ПК. Хотя данный ПК не использует оперативную систему реального времени, его высокая мощность выполняет модель реального времени для всех практических целей.
Программа имитации LabView соединена с ПЛК так называемой SimbaPro PCI с адаптером профиля шины DP (децентрализованной периферии), который может имитировать все ноды DP, соединенные с ПЛК. Время обновления устанавливают на 10 мс (100 Гц), находящимся во времени цикла ПЛК (обычно 20 мс).
Результаты аппаратно-программного тестирования показаны на фиг.5. Используемая колонна имеет длину 3200 м, одинаковую с длиной колонны, используемой в испытании в полевых условиях (см. ниже). Теоретический период низшей моды составляет 5,2 с. На фиг.5 показан график 70 крутящего момента и скорость вращения бурильной колонны (кривая 72) и верхнего привода (кривая 74) во время периода в 150 с, включающего в себя интервал в 5 с, где скорость верхнего привода увеличивается от нуля до 100 об/мин. Настраиваемое регулирование скорости включается через 30 с после пуска вращения. Установившиеся колебания прилипания-проскальзывания получены вскоре после пуска. Период прилипания-проскальзывания стабилизируется около 5,3 с. Данное несколько больше теоретического периода колебаний маятника, но продленный период согласуется с тем фактом, что интервал прилипания является значительным. Отмечаем, что скорость верхнего привода почти постоянная во время данной части регулирования скорости.
Когда настраиваемое регулирование скорости включают, скорость верхнего привода (кривая 78) временно показывает ярко выраженные динамические изменения 79 в ответ на большие изменения крутящего момента. Но после нескольких периодов перемещение прилипания-проскальзывания исчезает и скорость верхнего привода, а также скорость долота, становятся сглаженными. Когда настраиваемое регулирование скорости вновь выключается, амплитуда скорости в скважине (кривая 76) начинает расти, до развития полного перемещения прилипания-проскальзывания. Данная нестабильность является следствием отрицательного демпфирования, включенного в состав модели крутящего момента на колонне.
На фиг.6 показаны результаты 80 тех же имитаций, но теперь сфокусированных на рассчитанном ПЛК показателе интенсивности прилипания-проскальзывания (кривая 87) и мгновенной скорости долота (кривая 84), отмечаем, что нижний график является продолжением верхнего графика и показывает разницу между имитируемой скоростью (кривая 84) и расчетной скоростью (кривая 86). Расчет скорости долота весьма хорош во время установившихся условий, но имеет значительную погрешность во время запуска. Несмотря на это, расчетная скорость долота может дать бурильщику картину изменений скорости в скважине. Эффективность настраиваемого регулятора скорости четко иллюстрирует кривая 87 показателя интенсивности прилипания-проскальзывания: когда используют настраиваемое регулирование скорости, показатель интенсивности прилипания-проскальзывания падает почти до нуля. После выключения настраиваемого устройства управления, показатель интенсивности прилипания-проскальзывания вновь увеличивается.
Испытание в полевых условиях
Настройка испытана в полевых условиях во время бурения глубокой наклонно-направленной скважины. Колонна имела длину приблизительно 3200 м и бурильную трубу 5,5 дюймов (140 мм). К сожалению, испытание закончилось после относительно короткого периода интенсивных условий прилипания-проскальзывания, когда алмазное долото вскрыло более мягкий пласт. Новый пласт сделал долото менее агрессивным с меньшим отрицательным демпфированием, таким образом, удалив основной источник колебаний прилипания-проскальзывания.
На фиг.7 показан пример, в котором перемещение прилипания-проскальзывания развивается при вращении со стандартным жестким регулятором скорости. Показаны два графика 90: один крутящего момента на валу относительно времени и другой скорости долота относительно времени. Несколько комментариев по данным графикам даны ниже:
Данные записывали с ПЛК с частотой регистрации приблизительно 9 Гц.
«Откорректированный крутящий момент верхнего привода (ВП)» (кривая 92) является расчетным крутящим моментом на колонне и равен измеренному крутящему моменту на валу, откорректированному по действию моментов инерции.
Откорректированный крутящий момент ВП также как скорость долота рассчитывают обработкой записанных данных с использованием способов, описанных выше.
Стандартный регулятор скорости верхнего привода является очень жестким, поскольку изменения измеренной скорости (кривая 94) можно с трудом увидеть после отключения настраиваемого регулирования скорости, и когда число оборотов верхнего привода является, практически, постоянным. Соответствующие небольшие ускорения являются причиной, по которой измеренный крутящий момент на валу почти совпадает с крутящим моментом на колонне, откорректированным по моментам инерции во время данного периода.
Высокочастотные колебания крутящего момента (при 1,1 Гц), которые видно на первой части кривой 96 когда настройка включена, вероятно, получены от резонанса высшей моды в бурильной колонне. Данные вибраций кажутся независимыми от типа используемого регулятора скорости, но приходят к нулю, когда прилипание-проскальзывание не развивается.
Коэффициент защиты (линия 98) является установленным оператором коэффициентом подвижности а, упомянутым выше.
Наблюдаемый период прилипания-проскальзывания составляет приблизительно 5,2 с, что хорошо согласуется с теоретическим периодом для данной конкретной колонны.
Другой пример успешного устранения перемещения прилипания-проскальзывания показан на фиг.8. На данной фигуре показан график 100, аналогичный графику 90.
«Установка скорости ВП» (кривая 102) является командой скорости, переданной на привод. Когда настройка включена, данный уровень поднимается, так что шунтированный регулятор скорости привода всегда стремится к увеличению крутящего момента за динамическое ограничение нового регулятора скорости. В данном случае, увеличение скорости слишком мало, что обуславливает фиксирование динамической скорости регулятором скорости привода. Данное фиксирование должно уменьшать демпфирующий эффект при настраиваемом ПИ регуляторе.
Когда настройка включена, коэффициент подвижности (линия 104) составляет приблизительно 15%. Данное значение является недостаточно высоким, поскольку колебания прилипания-проскальзывания не устраняются до увеличения оператором данного коэффициента на поз. 106.
После исчезновения перемещений прилипания-проскальзывания на отметке около 4310 с, колебания в 1,1 Гц вновь появляются с амплитудой, аналогичной наблюдавшейся ранее. Но теперь вибрации также видны в измеренной скорости.
Дополнительные данные, не включенные в данный документ, показывают, что амплитуда колебаний в 1,1 Гц уменьшается, но полностью к нулю не приходит, когда коэффициент подвижности дополнительно увеличивают. Данное означает, что хотя в импедансе верхнего привода доминирует инерция, при данной частоте мягкий ПИ-регулятор также имеет некоторый демпфирующий эффект на колебания высшей моды.
Высшие моды прилипания-проскальзывания
Способ демпфирования колебаний прилипания-проскальзывания, описанный выше, работает очень хорошо в широком диапазоне случаев. Вместе с тем, расширенное аппаратно-программное имитационное тестирование выявило дополнительную проблему для экстремально длинной колонны (обычно 5000 м или более) и измеренного, т.е. основного периода колебаний прилипания-проскальзывания, превышающего около 5-8 с, то есть частоты ωs около 0,2-0,13 Гц. Способ также способен демпфировать колебания прилипания-проскальзывания основной моды, но сразу после подавления таких колебаний вторая естественная мода стремится стать нестабильной и расти до развития полного прилипания-проскальзывания на второй моде. Данная вторая мода имеет естественную частоту, выше приблизительно в три раза основной частоты ωs колебаний прилипания-проскальзывания. Колебания прилипания-проскальзывания высшего порядка видны как циклические изменения с коротким периодом (менее около 1/3 основного периода колебаний прилипания-проскальзывания) и большой амплитудой (более 2 КНм) крутящего момента на валу привода. Нами также найдено посредством имитаций, что во время второй моды колебаний прилипания-проскальзывания скорость вращения долота изменяется от нулевой до максимальной скорости, превышающей в два раза среднюю скорость.
Имитации показали, что система, имеющаяся в продаже под торговой маркой SOFT TORQUE®, также испытывает аналогичные проблемы. Ни одна из систем не способна подавлять одновременно обе, первую и вторую моду колебаний прилипания-проскальзывания.
Нами сделано открытие, что данную проблему можно разрешить уменьшением действующего момента инерции бурильного механизма. Существуют несколько путей уменьшения действующего момента инерции, включающих в себя выполнение относительно небольшого изменения в настраиваемом ПИ-регуляторе, описанном выше и выбора более высокой передачи в бурильном механизме. Преимущества уменьшения действующего момента инерции включают в себя: более эффективное демпфирование высшей моды колебаний и увеличенные допуски в способах по погрешностям в расчетной частоте колебаний прилипания-проскальзывания. Имеются также два пути, уже идентифицированные выше, для уменьшения действующего момента инерции бурильного механизма: настраивание регулятора скорости и переключение передачи (если возможно). Каждый из них должен быть описан ниже.
Настраивание регулятора скорости для демпфирования высших мод
Для ясности первый вариант осуществления регулятора 42 скорости, описанный выше, должен именоваться «настраиваемый ПИ-регулятор», а второй вариант осуществления регулятора 42 скорости, описанный выше, должен именоваться «ПИ-регулятор с компенсацией момента инерции».
Перед описанием используемых при необходимости улучшений способа, первым излагаем основное описание высших мод крутильных колебаний колонны. Как описано выше (см. уравнения (14) и (15), естественную угловую частоту для моды m для колонны без потерь, вращающейся верхним приводом с нулевой подвижностью дает:

где m - положительное целое число, показывающее номер моды (m=1 для низшей моды);
Jb - момент инерции для компоновки низа бурильной колонны (КНБК)
ζ - характеристический импеданс бурильных труб;
с - скорость звука для крутильных волн; и
l - длина секции бурильных труб (исключая длину КНБК).
Удобно представить нормализованную частоту:

и нормализованный момент инерции

Здесь использован тот факт, что характеристический импеданс можно выразить, как ζ=Jdp с/l, где Jdp - представляет суммарный момент инерции бурильных труб. Уравнение (21) частоты теперь можно записать так:

Для ненулевых значений момента инерции данное уравнение является трансцедентным, что означает отсутствие для него аналитических решений в явном виде и что оно решается численно, как описано выше. На фиг.9 график 110 показывает три самых нижних корня (m=1, 112; m=2, 114; m=3, 116) относительно нормализованного момента инерции jb. Кривые 118, 119 отношения частоты показывают, что отношение является близким к постоянному и приблизительно равным 2m-1 для малого момента инерции (jb≤1) КНБК. На практике, очень длинные бурильные колонны (>5 км), используемые для горизонтальных скважин с большим отходом, имеют весьма небольшие и легкие КНБК (без УБТ или ТБТ) для уменьшения суммарного момента трения. Поэтому низкие отношения 3 и 5 моментов инерции для второй и третьей моды соответственно являются очень хорошим приближением к реальности.
Соответствующие формы мод для динамической скорости вращения можно найти по волновым числам km которые можно записать так:

Соответствующие собственные функции, описывающие, как амплитуда угловой скорости изменяется с глубиной, являются следующими:

где глубина z является глубиной, отнесенной к положению верхнего привода.
На фиг.10 график 120 показывает формы мод m±0,25σm трех самых нижних мод для случая, когда jb=1. Ось Y представляет нормализованную глубину zn=z/l. Ясно, что долото (нижний конец колонны, где z=-1) близко к пучности для всех трех модов.
Заявителями обнаружено, что регулятор 42 скорости можно усовершенствовать для противодействия прилипанию-проскальзыванию бурового долота как в первой, так и во второй моде и, до некоторой степени, в высших модах колебаний прилипания-проскальзывания. Основа улучшения найдена в уравнении углового перемещения бурильного механизма 30. В отношении уравнения (3), приведенного выше, уравнения движения бурильного механизма 30 можно выразить так:

где крутящий момент Td бурильного механизма дает уравнение:

и где
Jd - суммарная механическая инерция привода (включающего в себя коробку передач и приводные двигатели)
Jc - регулируемая компьютером или вручную компенсационная инерция
Р - коэффициент Р регулятора скорости (относится к выходному валу)
I - коэффициент I регулятора скорости
Ωset - установленная угловая скорость
Ω - фактическая измеренная скорость вращения верхнего привода.
Таким образом, регулятор скорости использует три параметра для регулирования крутящего момента Td, приложенного бурильным механизмом 30 к бурильной колонне. Другие два параметра в правой части известны из уравнения (2), приведенного выше.
Первый параметр в правой части уравнения (28) является ключевым компонентом для расширения функциональности настраиваемого ПИ-регулятора первого варианта осуществления. По контрасту с нормальным параметром производной ПИД-регулятора, пропорциональным производной погрешности в скорости, новый параметр регулятора скорости является пропорциональным только производной измеренной скорости. Коэффициент Jc пропорциональности называют компенсационной инерцией, поскольку он имеет размерность момента инерции и уменьшает действующий момент инерции бурильного механизма 30. Это видно из объединения уравнений (2) и (28) и перемещения данного параметра в левую часть:

Данное уравнение является уравнением движения для бурильного механизма 30 с уменьшенным моментом инерции с использованием обычного или настраиваемого ПИ-регулятора скорости. Преимущество данного уменьшения момента инерции состоит в том, что полоса поглощения частоты бурильного механизма 30 увеличена, как описано выше. Кроме того, поскольку Jc регулируется программным обеспечением, компенсацию момента инерции можно легко включать и выключать в регуляторе скорости, и при включении регулировать в режиме реального времени, если необходимо. Альтернативно, возможно обеспечивать бурильщику ручную установку Jc, например, с пульта бурильщика.
Следуя методологии, аналогичной описанной выше, в соединении с уравнением (6), приведенным выше, действующий крутильный импеданс можно записать, как комплексную функцию:

где i=√-1 мнимая единица и ω угловая частота. Соответствующий коэффициент отражения rd для бурильного механизма 30:

где ζ - так называемый характеристический импеданс бурильной трубы и представляет отношение крутящего момента и угловой скорости для бегущей волны, распространяющейся по бурильной колонне 12. Комплексный коэффициент отражения представляет как амплитуду, так и фазу отраженной волны, распространяющейся вверх по бурильной колонне 12 и отраженной на вершине. Величина данного коэффициента отражения прочно связана с крутильными колебаниями, как описано выше в соединении с настройкой регулятора 42 скорости для демпфирования основных колебаний прилипания-проскальзывания.
Удобно определять действующий момент инерции, как J=Jd-Jc и безразмерное сопротивление b=(ωJ-I/ω)/P. Параметр подвижности а=ζ/Р, как определено выше, связан с первым вариантом осуществления. Демпфирование, являющееся количеством крутильной энергии, поглощаемой бурильным механизмом 30 (т.е. крутильной энергией, не отражающейся назад в бурильную колонну 12), тогда можно записать так:

Когда b=0, то есть когда ω=ω0=√I/J, демпфирование максимально и равно 

Соотношение частот ω/ω0 для высшего корня (со знаком +) дает количественную меру для полосы частот поглощения β бурильного механизма 30.

Данная формула показывает, что полоса частот поглощения β увеличивается, когда действующий момент инерции J уменьшается. Соответственно, следуя уравнению (9), приведенному выше, параметр I ПИ-регулятора с компенсацией момента инерции установлен 
Легко подтверждается, что отношение между высшими и низшими корнями уравнения (33) частоты равно β2, что означает симметрию кривой отражения относительно центральной частоты, при построении графика с логарифмической осью частоты.
На фиг.11 график 130 показывает увеличение полосы частот поглощения и коэффициент отражения относительно частоты для стандартного жесткого регулятора 132 скорости, настраиваемого ПИ-регулятора 134 и ПИ-регулятора 136 с компенсацией момента инерции. В примере принята 5 дюймовая (127 мм) бурильная труба (с характеристическим импедансом ζ=340 Нмс), суммарная механическая инерция Jd=2000 кгм2 верхнего привода (т.е. сумма механической инерции двигателя и редуктора), 50% компенсация момента инерции (Jc=J=0,5Jd), параметр подвижности а=0,25, и наблюдаемая или измеренная основная (m=1) частота прилипания-проскальзывания 0,1 Гц (период = 10 с). Посредством уменьшения действующей инерции бурильного механизма 30 полоса частот поглощения увеличивается от β=1,76 (настраиваемый ПИ-регулятор) до β=2,75 (ПИ-регулятор с компенсацией момента инерции). Стрелки на фиг.11 установлены на естественных частотах соответствующих мод. Ясно видно, что коэффициент отражения для второй моды (m=2) падает от 0,93 до 0,82 при переключении с настраиваемого ПИ-регулятора на ПИ-регулятор с компенсацией момента инерции. Данное падение представляет значительное улучшение демпфирования, достаточное для подавления и в некоторых вариантах осуществления предотвращения, колебаний прилипания-проскальзывания второй моды.
Также возможно, если необходимо, дополнительное улучшение демпфирования высших мод (т.е. с m>2) смещением минимума коэффициента отражения кривой к более высоким частотам. Данное представляет из себя вид регулируемой отстройки, в которой максимальную частоту демпфирования специально удаляют от основной частоты колебаний прилипания-проскальзывания, измеренной или наблюдаемой (см. раздел выше, по измерениям ωs). После измерения или наблюдения основной частоты, значение может быть увеличено между около 0% и 40%. Данную смещенную основную частоту затем используют для определения параметра I регулятора скорости, как описано выше. Эффект от данного состоит в сдвиге кривой коэффициента отражения к более высоким частотам, что уменьшает коэффициенты отражения, по меньшей мере, некоторых высших мод колебаний прилипания-проскальзывания. Альтернативным путем определения является увеличение ωs с β в некоторой степени, между нулем и единицей, например β1/4. Конкретное преимущество здесь заключается в демпфировании основной моды, остающемся вблизи ее исходного значения, например, с изменением коэффициента отражения от 0,6 до 0,62.
Вместе с тем, необходимо заботиться, чтобы минимум кривой коэффициента отражения не был смещен слишком далеко от основной моды колебаний прилипания-проскальзывания. Мы предлагаем не увеличивать основную частоту прилипания-проскальзывания, используемую для определения параметра I больше, чем с коэффициентом β1/2 от фактически измеренной или наблюдаемой частоты. Таким путем демпфирование, по меньшей мере, некоторых из высших мод (например, m=2, 3) улучшают, жертвуя только малым количеством демпфирования основной моды прилипания-проскальзывания.
Дополнительное преимущество смещения точки минимального отражения (т.е. максимального демпфирования) на более высокие частоты заключается в увеличении демпфирования частот ниже основной. Данное означает, что изменения крутящего момента долота обуславливают меньшие изменения угловой скорости сверху бурильной колонны 12, делая бурильный механизм «более жестким» на данных низких частотах, что важно для производительности бурения.
На графике 140 фиг.12 показан пример такой управляемой отстройки. Кривая 142 отражения регулятора скорости с компенсацией инерции отстроена так, что максимальная частота демпфирования на около 22% выше основной частоты прилипания-проскальзывания (показано кривой 144 отражения регулятора скорости, настраиваемого в первую очередь для демпфирования основной частоты). В кривой 142 отражения коэффициент отражения на основной частоте увеличен незначительно, от 0,6 до 0,62, а коэффициент отражения второй моды значительно улучшен от 0,82 до 0,75.
Несколько неожиданно нами найдено, что использование только отстройки, т.е. смещения основной частоты демпфирования, но с сохранением компенсации момента инерции постоянной, ведет к более узкой полосе поглощения с очень малым смещением части высоких частот. Для преодоления данного нами найдено, что как объединение смещения частоты, так и дополнительная компенсация момента инерции достигаются одновременно: частота смещается с сохранением большей ширины полосы поглощения, так что демпфирование одной или нескольких высших мод улучшается. Одним путем для выполнения данного является сохранение произведения ω0J постоянным. В примере, показанном на фиг.12, действующий момент инерции делится на аналогичный коэффициент, β1/4=1,22, увеличивающий центральную частоту. Данный выбор оставляет произведение ω0J и параметра β ширины полосы частот неизменным. Данный вид смещения частоты приводит к увеличению компенсации момента инерции, в данном конкретном случае от Jc=0,5Jd до Jc=0,59Jd.
Анализ, приведенный выше, основан на допущении, что отсутствует задержка времени или пропуск через фильтр измеренной скорости Ω. На практике измерение скорости должно быть связано с малой задержкой времени. Кроме того, ускорение привода, необходимое для компенсации момента инерции, может быть очень шумообразующим, если фильтр производных не объединен с фильтром. На фиг.13 график 150 показывает действие задержки в 20 мс измеренной скорости Ω и фильтра низких частот (постоянная времени затухания 50 мс), используемых для получения сигнала сглаженного ускорения. На данной фигуре видно, что задержка и фильтр действуют на коэффициент отражения регулятора с компенсацией момента инерции так, что он превышает единицу для высоких частот (>0,75 Гц). Данное означает, что частоты имеют отрицательное демпфирование, и должен происходить рост амплитуды, если естественное демпфирование на колонне не превосходит отрицательный вклад бурильного механизма 30. По контрасту действие задержки на коэффициенты отражения для ширины полосы поглощения нормального и настраиваемого регуляторов весьма незначительное. Так что, когда компенсация инерции Jc является регулируемой (например, выше Jc увеличенной ширины полосы поглощения и наоборот), необходимо осторожно ее увеличивать. В частности, когда ширина полосы поглощения увеличивается, более широкий диапазон частот подвергается отрицательному демпфированию.
Для реализации нового параметра крутящего момента из уравнения (28), ПИ-регулятор требует входящего сигнала углового ускорения. Угловое ускорение на валу привода обычно не измеряется отдельно, но выводится из сигнала скорости с использованием следующего дифференциального аппроксимирования:
Здесь ΔΩ - измеренное изменение скорости во время цикла вычисления. Данная аппроксимация вводит время задержки (равное половине времени цикла) в дополнение к возможной задержке в самой измеренной скорости.
Если необходимо, регулятор скорости 42 может быть выполнен для проверки приблизительного основного периода прилипания-проскальзывания, определенного или измеренного, по пороговому периоду, такому как 5 с. Если основной период больше данного порога, регулятор скорости может уменьшить действующий момент инерции бурильного механизма 30 для демпфирования любых колебаний высшей моды. Кроме того, количество демпфирования может быть пропорциональным основному периоду, например, начиная с 0% для основного периода в 5 с, увеличиваясь линейно до 75% компенсации момента инерции для основного периода в 8 с. Другие корректировки (например, нелинейные) действующего момента инерции с измеренным периодом предусмотрены.
На фиг.14 график 160 показывает, как регулятор 42 скорости с компенсацией момента инерции способен подавлять вторую моду колебаний прилипания-проскальзывания. Верхнее ответвление 162 графика показывает скорость 163 верхнего привода и скорость 164 долота, когда настраиваемый ПИ-регулятор включается в работу через 50 с после начала вращения бурильной колонны. Колебания прилипания-проскальзывания на основной частоте устраняются, но после короткого переходного периода 165 появляются колебания прилипания-проскальзывания 166 второй моды. Отмечаем, что частота второй моды почти 0,3 Гц или в три раза выше частоты основной моды.
Нижнее ответвление графика 167 показывает результаты аналогичной имитации, когда ПИ-регулятор с компенсацией момента инерции включается в работу через 50 с от начала вращения. Улучшенный регулятор скорости использует коэффициент компенсации 0,5, т.е. Jc=0,5Jd, но смещение частоты (или «отстройка») не применяется. Данный регулятор скорости способен предотвращать колебания прилипания-проскальзывания как основной, так и второй моды, давая в результате сглаженное бурение только с малыми изменениями крутящего момента на валу и скорости долота.
Изменение передаточного числа для демпфирования высших мод
Если бурильный механизм 30 имеет многоскоростную коробку передач, выбор передачи также действует на ширину полосы поглощения и демпфирование высших мод путем, аналогичным способу настройки, приведенным выше. Данное получают из приведенного выше рассмотрения и из выражения суммарной механической инерции бурильного механизма:

где
Jg - момент инерции редуктора (относящийся к выходному валу);
Jm - момент инерции двигателя (ротора);
nm - число двигателей; и
ng - передаточное отношение (скорость двигателя/скорость редуктора)
Переключение с низкой передачи на высокую передачу означает, что передаточное отношение ng падает, обычно в два раза. Как пример, рассмотрим однодвигательный верхний привод (nm=1) с моментом инерции ротора двигателя Jm=25 кгм2, моментом инерции редуктора Jg=200 кгм2 и с двумя передаточными отношениями ng1=8,49 и ng2=4,25. Соответствующие значения моментов инерции на валу привода тогда становятся приблизительно Jd1=2000 кгм2 и Jd2=650 кгм2 на низкой и высокой передачах соответственно. Уменьшение механической инерции представляет собой значительное увеличение ширины полосы поглощения, как показано на графике 170 на фиг.15, фактически от β=1,76 (низкая передача) до β=3,95 (высокая передача). На фиг.15 кривая 172 показывает коэффициент отражения относительно частоты для ненастраиваемого жесткого регулятора на высокой передаче, кривая 174 для настраиваемого ПИ-регулятора согласно первому варианту осуществления на низкой передаче, и кривая 176 того же настраиваемого ПИ-регулятора на высокой передаче. Увеличение ширины полосы поглощения на высшей передаче можно ясно видеть.
На практике возможность выбора высокой передачи (т.е. с низким моментом инерции) ограничена, поскольку многие верхние привода не имеют многоскоростных коробок передач и поскольку значение крутящего момента на высокой передаче может быть слишком мало для преодоления высокого момента трения в экстремально глубоких и наклонно-направленных скважинах.
Использование ПИД-регулятора скорости для демпфирования высших мод
Другая альтернатива состоит в реализации возможной компенсации инерции посредством цифрового ПИД-регулятора скорости типа, стоящего в промышленных приводах переменного тока (например, ACS800, выпускаемого ABB). Такие привода обычно имеют интерфейс, обеспечивающий ручное управление параметрами Р, I и D регулятора скорости. Параметры устанавливают согласно уравнению (28) и в частности Р и I параметры можно устанавливать, как описано выше. Вместе с тем, параметр D является более сложным в реализации, поскольку пропорционален производной скорости на валу привода, а не производной погрешности скорости на валу привода, как в нормальном ПИД управлении. Поэтому считается невозможной реализация нового параметра JcdΩ/dt, поскольку данный последний параметр должен иметь нежелательное воздействие на установленную скорость. В частности, параметр D должен быть установлен с отрицательным значением для уменьшения действующего момента инерции. Вместе с тем, стандартный цифровой ПИД-регулятор можно адаптировать корректировкой программно-аппаратного обеспечения регулятора скорости посредством исходной программы низкого уровня привода или если данное недоступно пользователю, запросив изготовителя привода на предмет реализации данного параметра в программно-аппаратном обеспечении.
Следует отметить, что три параметра в стандартном ПИД-регуляторе не всегда определяют напрямую. Вместо этого, их обычно определяют не напрямую через так называемый К-коэффициент, то есть нормализованный Р-коэффициент, постоянную ti интегрирования по времени постоянную и постоянную td времени дифференцирующего звена. Р-коэффициент (относящийся к оси двигателя, имеет размерность в Нмс и связан с К-фактором формулой Pm=к×Tnom/(π×Nnom/30), где Tnom (в Нм) номинальный крутящий момент двигателя и Nnom (в об/мин) является номинальной скоростью вращения двигателя (обычно находится на заводской табличке двигателя). Постоянная интегрирования по времени является отношением ti=P/I, а постоянная времени дифференцирующего звена является td=D/P.
Подведем итоги: описан способ настройки ПИ-регулятора или ПИД-регулятора для подавления вредных колебаний прилипания-проскальзывания. В первом варианте осуществления создан регулятор скорости, обеспечивающий поглощение бурильным механизмом энергии колебаний прилипания-проскальзывания в полосе частот, включающей в себя основную частоту таких колебаний. Во втором варианте осуществления создан регулятор скорости, в котором ширина полосы поглощения бурильного механизма увеличена, и поглощение энергии более высокой моды (мод) улучшено по сравнению с первым вариантом осуществления, достаточно для подавления как основного, так и одной или нескольких высших мод колебаний.
В первом варианте осуществления система содержит ПИ-регулятор скорости привода, настраиваемый так, что он эффективно демпфирует крутильные колебания на частоте прилипания-проскальзывания или вблизи нее. Он является пассивным в том смысле, что не требует измерения крутящего момента на колонне, крутящего момента на валу или токов, как альтернативные системы. Демпфирующие характеристики настраиваемого бурильного механизма падают при уходе частоты от частоты прилипания-проскальзывания, но демпфирование никогда не падает ниже нуля, означая, что бурильный механизм никогда не должен усиливать крутильные вибрации высших мод. Он является пассивным, в том смысле, что не требует измерения крутящего момента на колонне, крутящего момента на валу или токов, как альтернативные системы. Демпфирующие характеристики настраиваемого бурильного механизма падают при уходе частоты от частоты прилипания-проскальзывания, но демпфирование никогда не падает ниже нуля, означая, что бурильный механизм никогда не должен усиливать крутильные вибрации высших мод. Во втором варианте осуществления система содержит ПИ-регулятор или ПИД-регулятор скорости привода, настраиваемый так, что бурильный механизм имеет более широкую полосу частот поглощения колебаний, которые включают в себя как основную моду, так и, по меньшей мере, одну более высокую моду колебаний прилипания-проскальзывания. Настройка во втором варианте осуществления использует компенсацию инерции для уменьшения действующего момента инерции бурильного механизма, как видно посредством регулятора и, при этом улучшения ширины полосы поглощения. Альтернативой настройки ПИ или ПИД-регулятора является изменение с включением более высокой передачи бурильного механизма.
Варианты осуществления изобретения являются подходящими для реализации в ПЛК регулирования бурильного механизма. Настраиваемый ПИ-регулятор можно либо реализовать в самом ПЛК или, альтернативно, с подсчетом постоянных Р и I регулятора скорости и передачей их в имеющийся цифровой регулятор скорости двигателей верхнего привода. Изобретение также включает в себя другие полезные аспекты, такие как интерфейс пользователя, выведенный на экран, автоматическое определение частоты прилипания-проскальзывания, расчет мгновенной скорости долота и подсчет показателя интенсивности прилипания-проскальзывания. Последние два основаны на геометрии бурильной колонны и измерении сигнала крутящего момента.
В заключение, очевидно, что настоящее изобретение и варианты осуществления, описанные в данном документе и охватываемые прилагаемой формулой изобретения, хорошо приспособлены к осуществлению задач и получению изложенных конечных результатов. Некоторые изменения можно выполнять в объекте изобретения без отхода от сущности и объема данного изобретения. Понятно, что изменения возможны в объеме данного изобретения, и оно дополнительно направлено на то, чтобы каждый элемент или этап, указанный в приведенной ниже формуле изобретения, был понятен, как относящийся к этапу напрямую и/или ко всем эквивалентным элементам или этапам. Следующая формула изобретения направлена на описание изобретения, насколько возможно широко, для любой возможной формы использования. Изобретение, заявленное в данном документе, является новым согласно 35 U.S.С. §102 и удовлетворяет условиям патентоспособности §102. Изобретение, заявленное в данном документе, не очевидно согласно 35 U.S.С. §103 и удовлетворяет условиям патентоспособности §103. Подробное описание и следующая формула изобретения соответствуют требованиям 35 U.S.С. §112. Изобретатели могут полагаться на доктрину эквивалентов для определения и оценки объема своего изобретения и следующей формулы изобретения, если они могут относиться к устройству, не отходящему незначительно от объема изобретения, но находящемуся явно вне объема, изложенного в следующей формуле изобретения. Все патенты, патентные заявки и научные материалы, идентифицированные в данном документе, полностью включены в данный документ для всех целей.
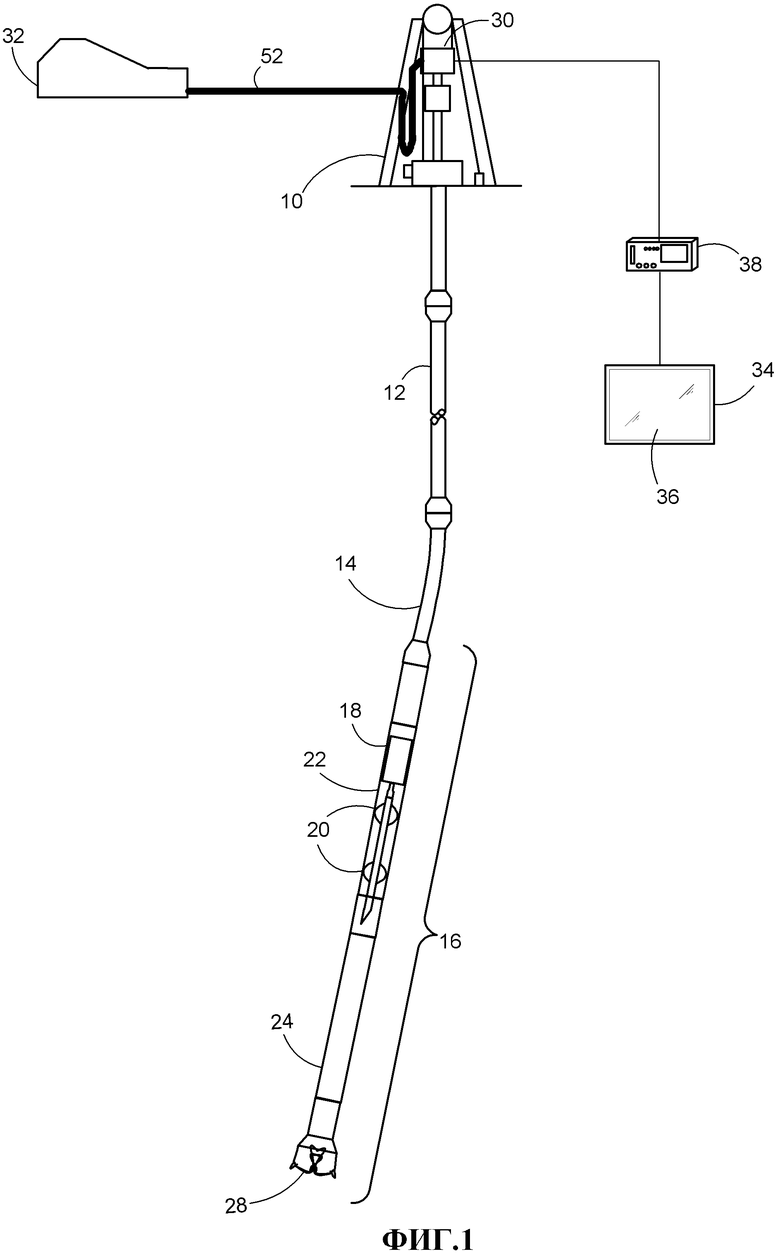
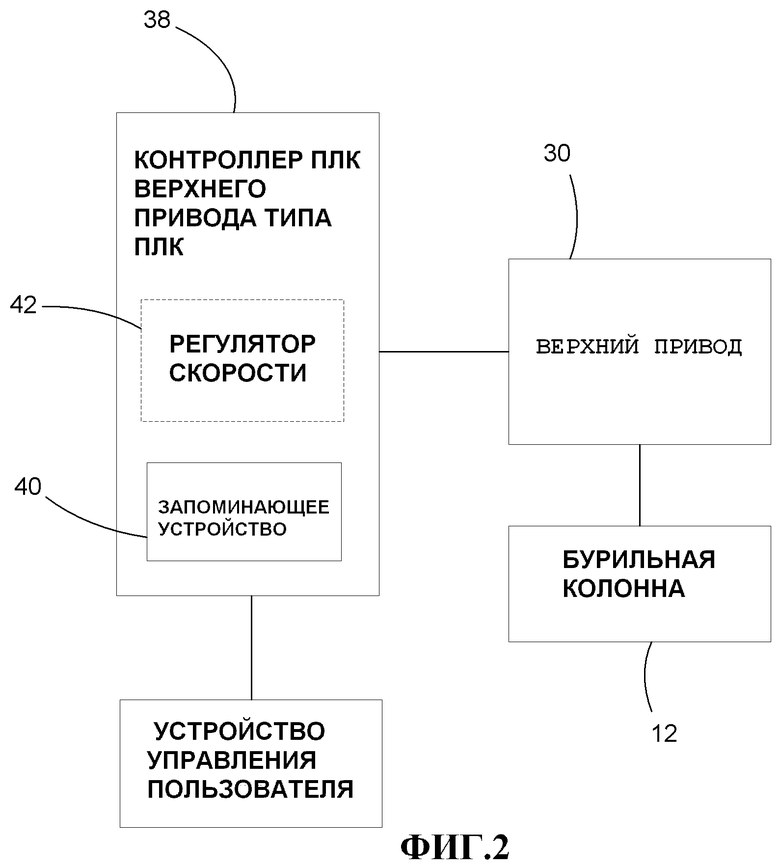
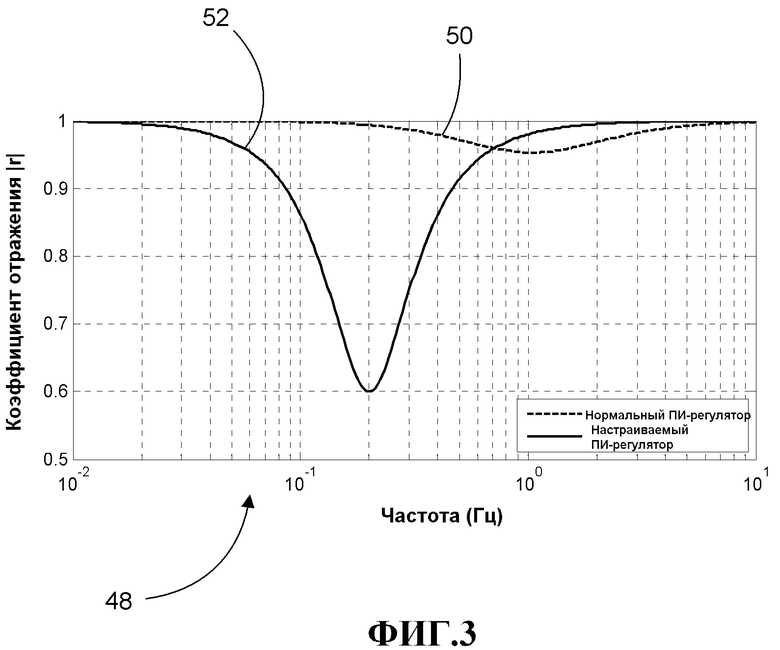
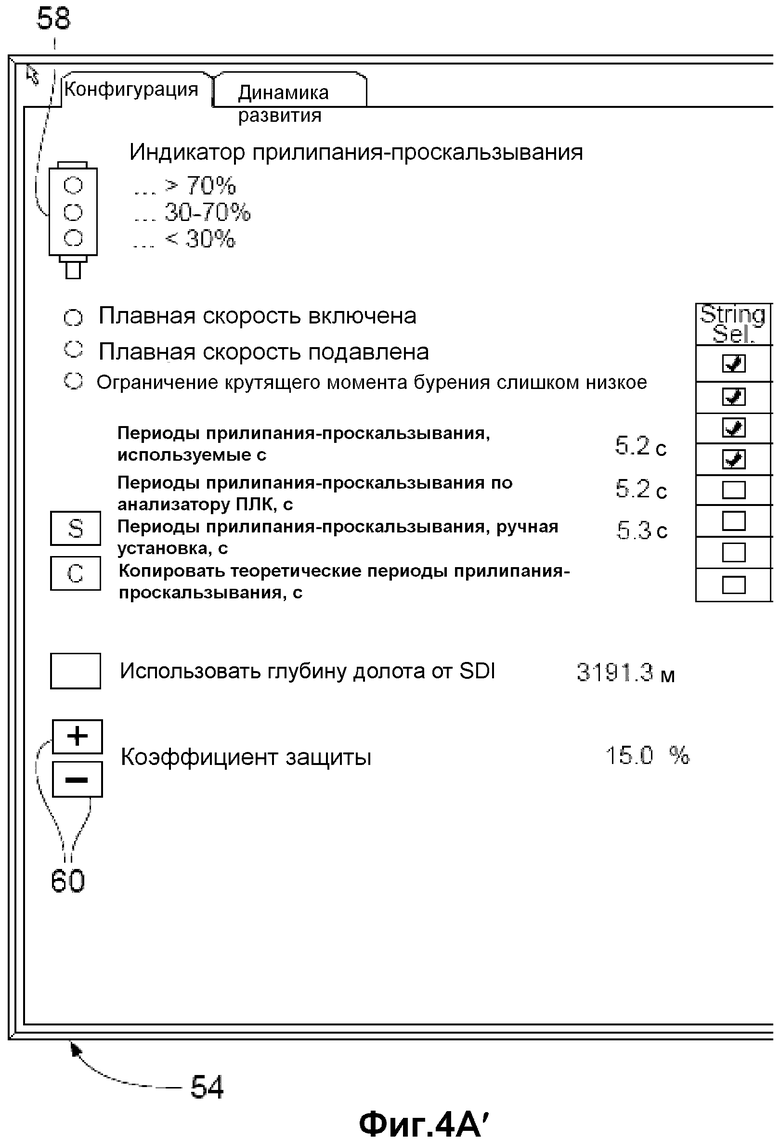
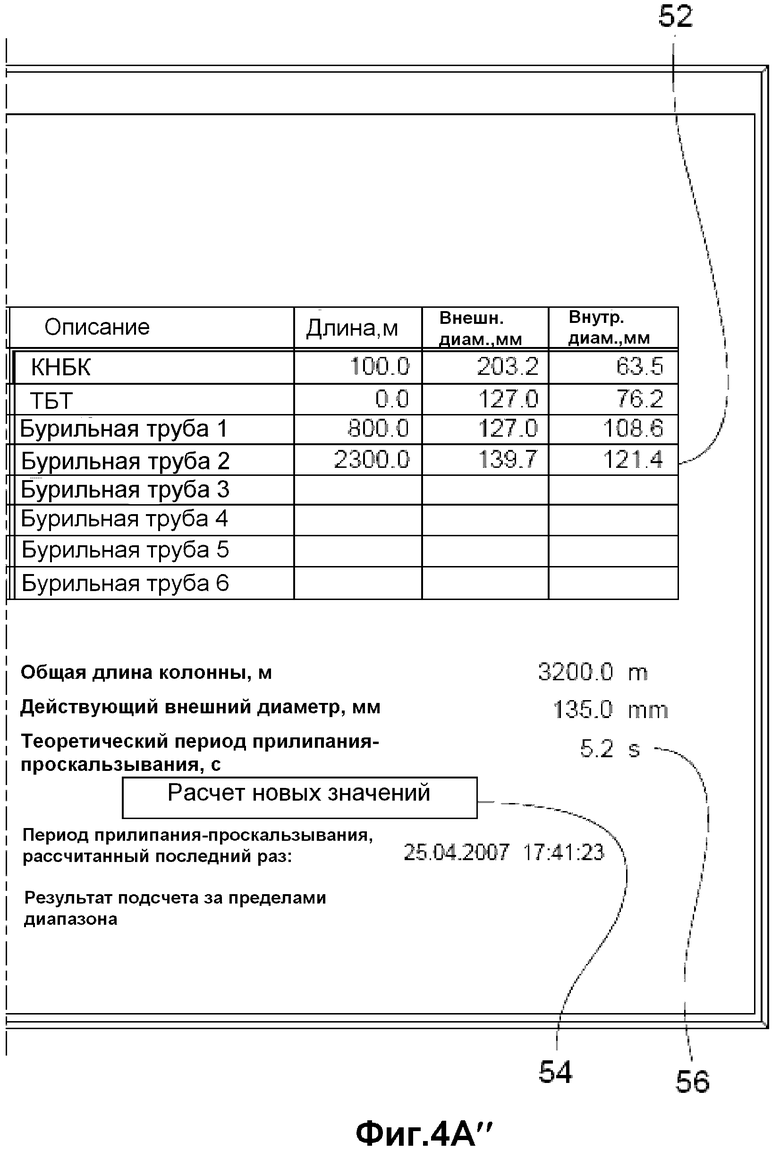
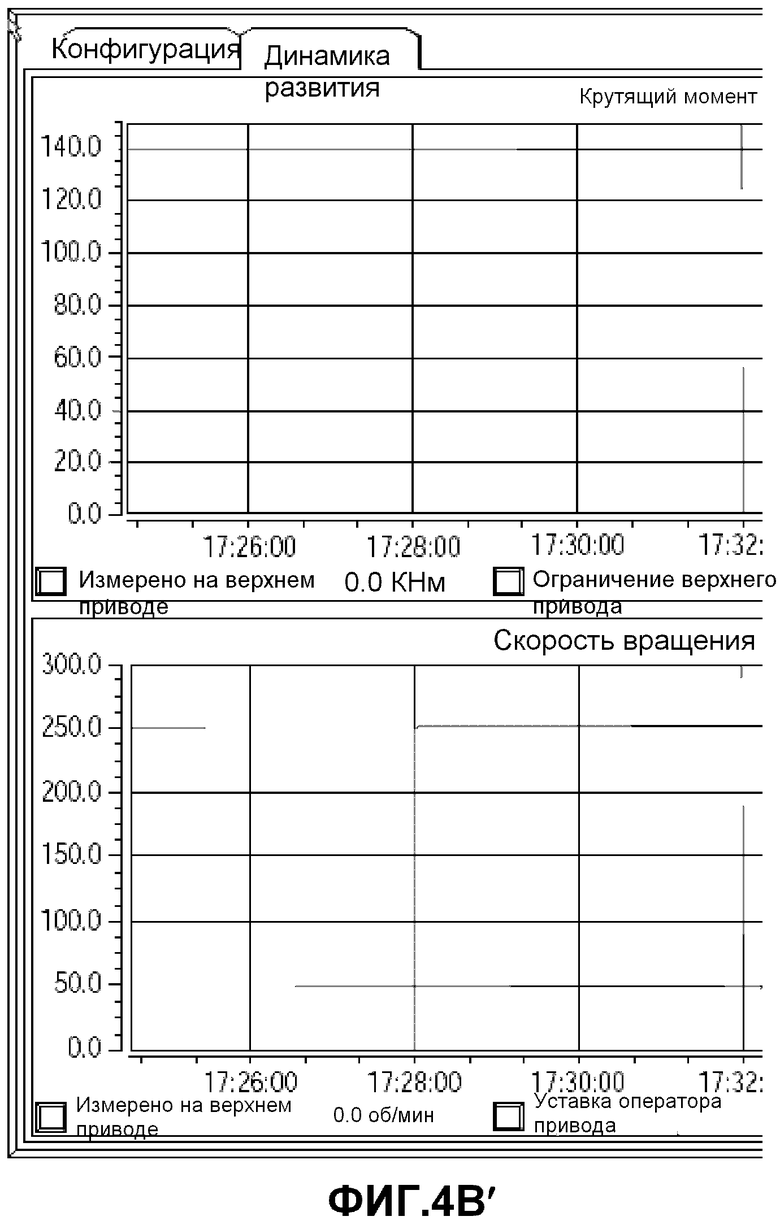
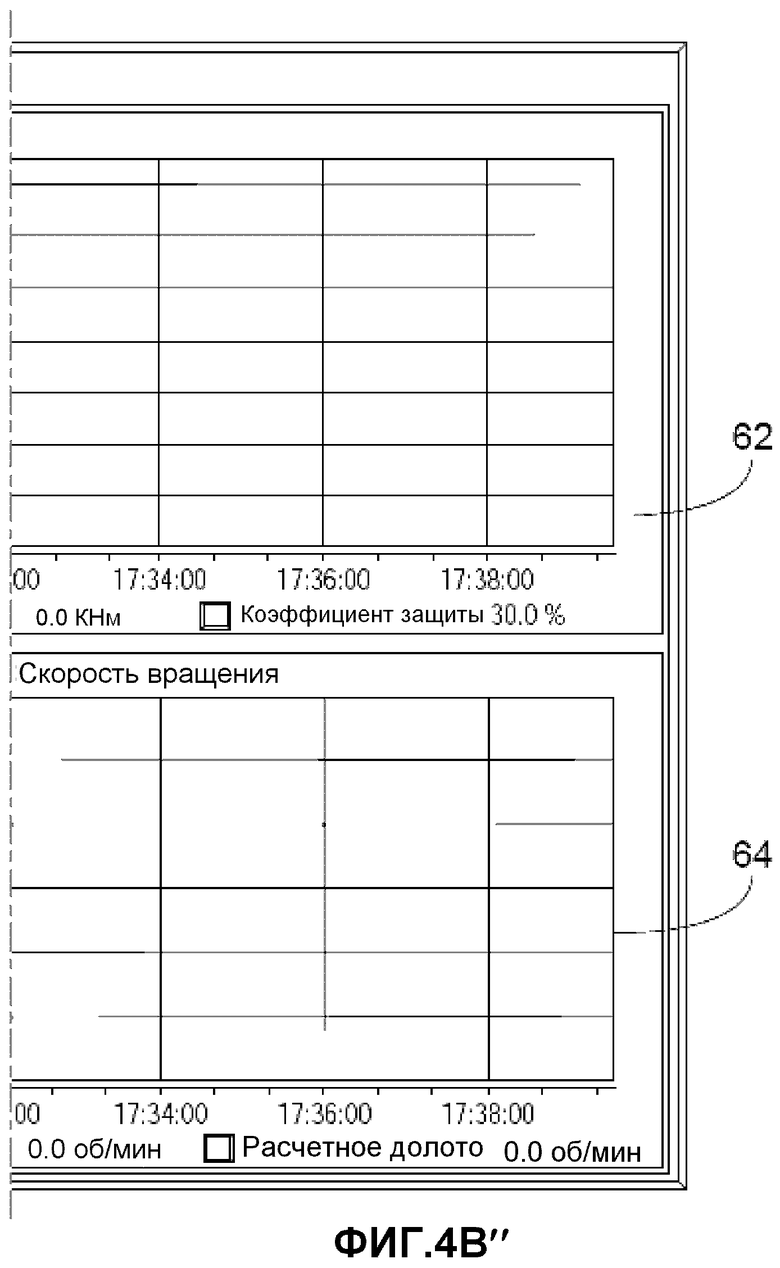
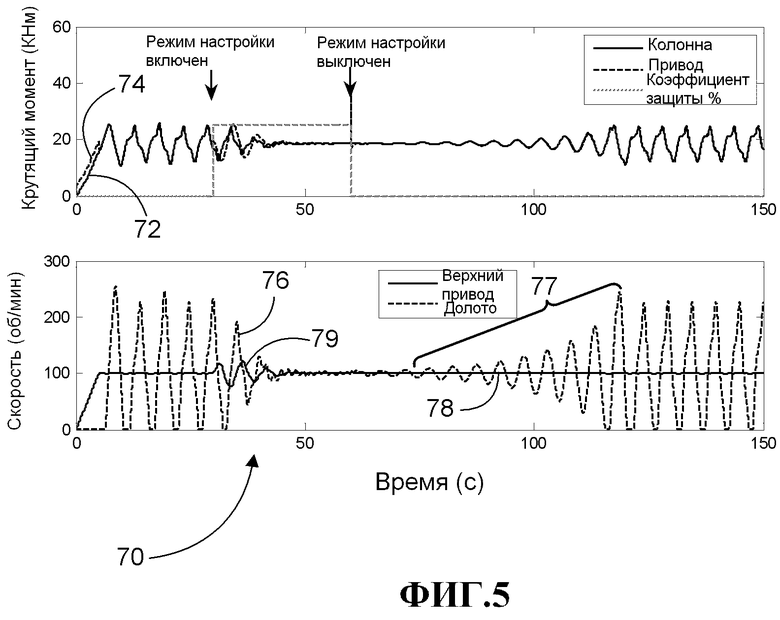
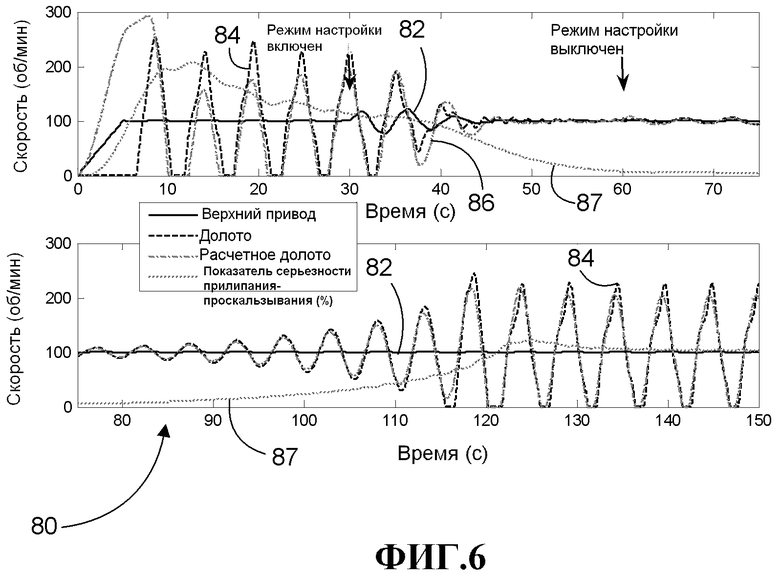
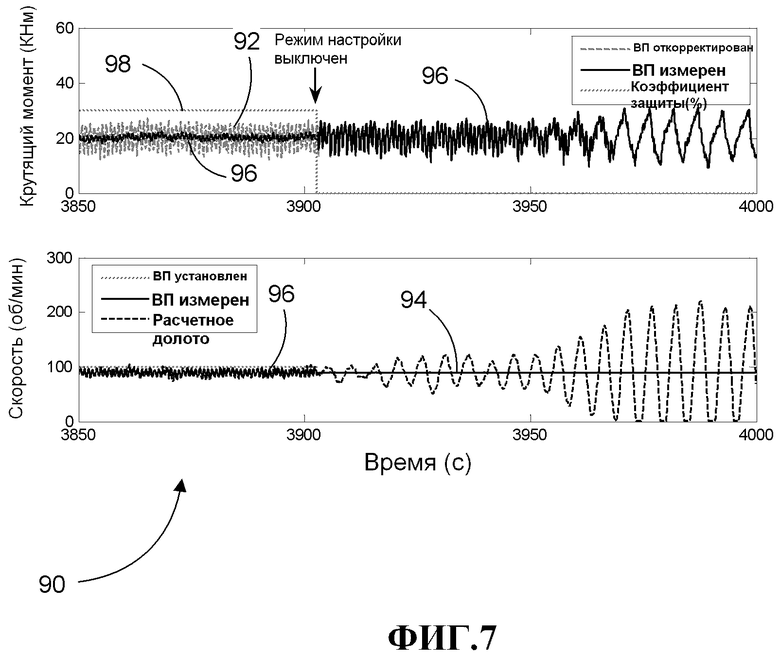
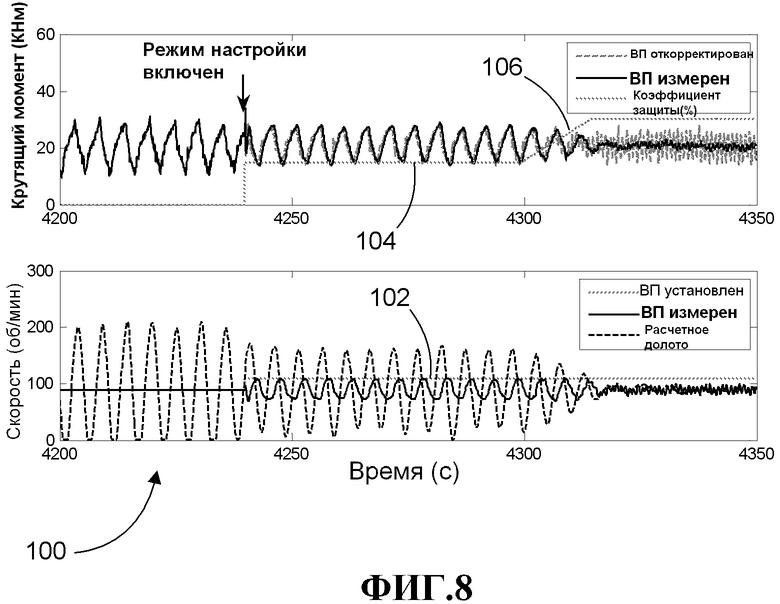
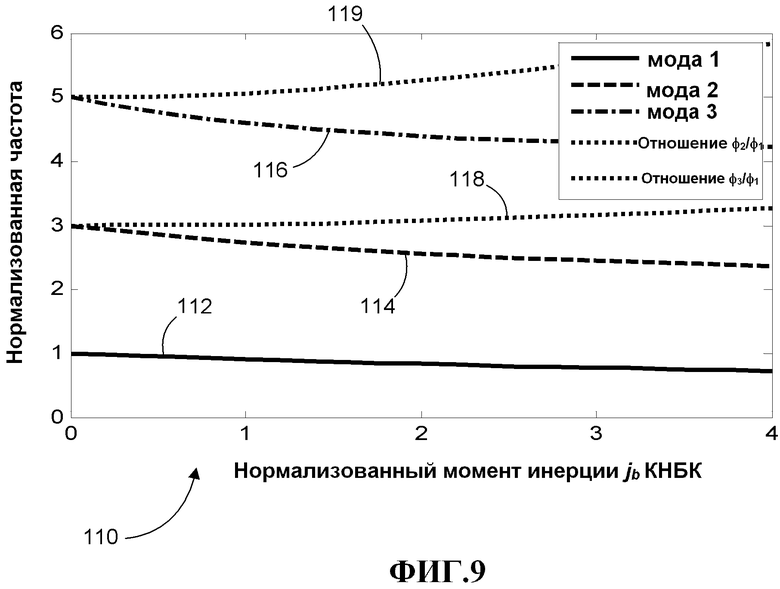
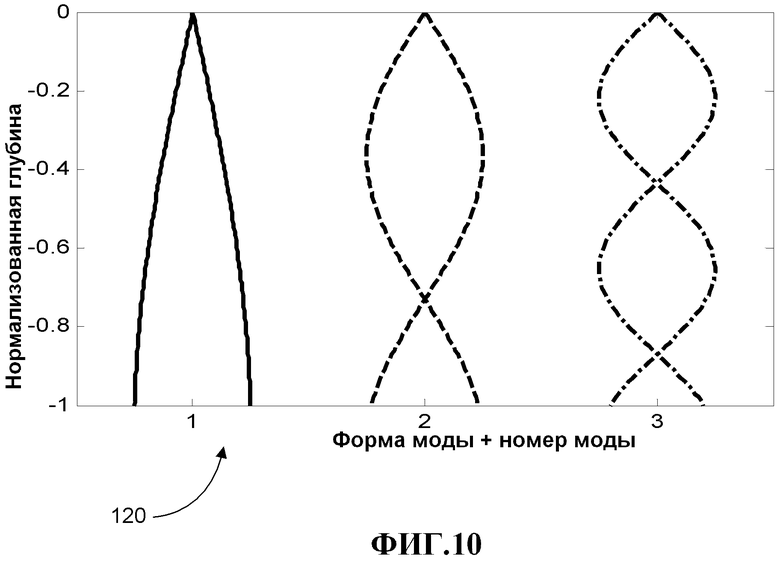
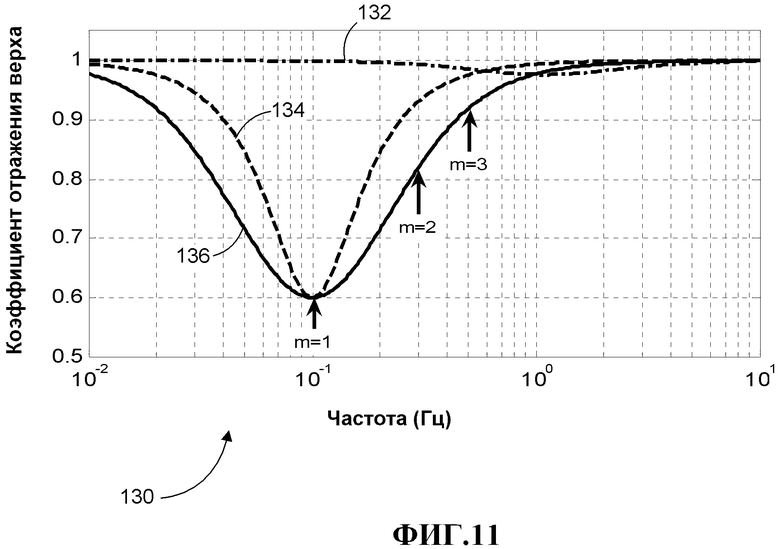
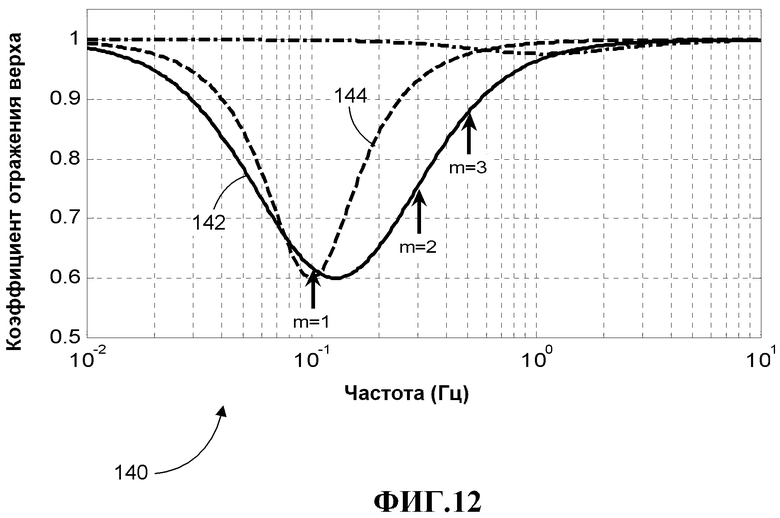
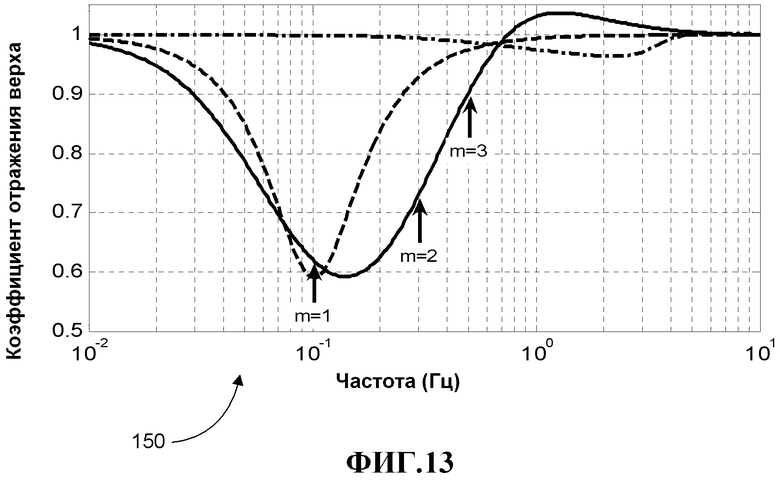
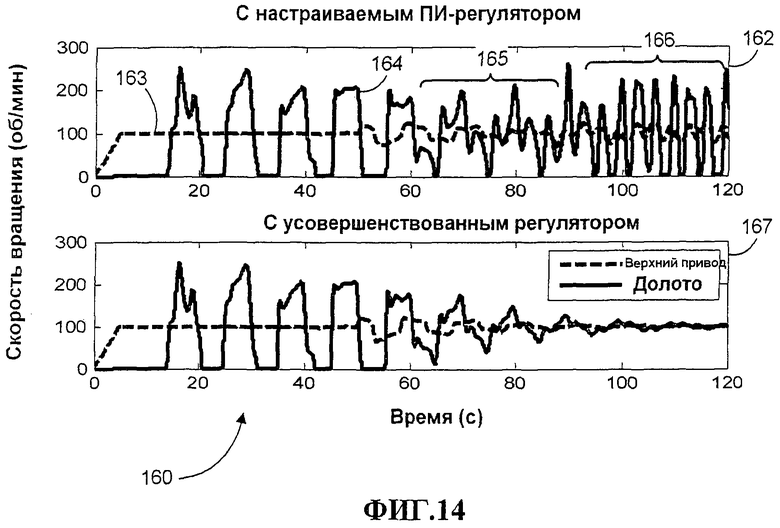
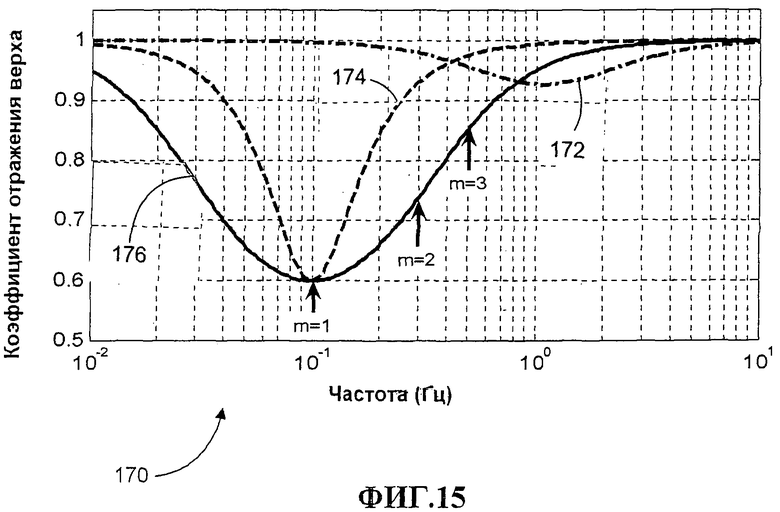
Изобретение относится к способу и устройству демпфирования колебаний прилипания-проскальзывания в бурильной колонне. Техническим результатом является настройка ПИ -регулятора для обеспечения демпфирования энергии крутильных волн на частоте прилипания-проскальзывания или вблизи нее. Способ содержит следующие этапы: а) демпфирование колебаний прилипания-проскальзывания с использованием бурильного механизма, расположенного в верхней части бурильной колонны, б) регулирование скорости вращения бурильного механизма с использованием пропорционально-интегрального регулятора, в) настройка пропорционально-интегрального регулятора так, что бурильный механизм поглощает большую часть крутильной энергии от бурильной колонны на частоте, равной или близкой основной частоте колебаний прилипания-проскальзывания, г) уменьшение действующего момента инерции бурильного механизма, при этом демпфирующий эффект бурильного механизма увеличивается для частот выше основной частоты колебаний прилипания-проскальзывания. 5 н. и 17 з.п. ф-лы, 15 ил.
1. Способ демпфирования колебаний прилипания-проскальзывания в бурильной колонне, содержащий следующие этапы:
а) демпфирование колебаний прилипания-проскальзывания с использованием бурильного механизма, расположенного в верхней части бурильной колонны;
б) регулирование скорости вращения бурильного механизма с использованием пропорционально-интегрального регулятора, отличающийся тем, что содержит следующие этапы:
в) настройка пропорционально-интегрального регулятора так, что бурильный механизм поглощает большую часть крутильной энергии от бурильной колонны на частоте, равной или близкой основной частоте колебаний прилипания-проскальзывания;
г) уменьшение действующего момента инерции бурильного механизма, при этом демпфирующий эффект бурильного механизма увеличивается для частот выше основной частоты колебаний прилипания-проскальзывания.
2. Способ по п.1, в котором колебания прилипания-проскальзывания содержат крутильные волны, распространяющиеся по бурильной колонне, и этап (в) содержит корректировку параметра I пропорционально-интегрального регулятора в зависимости от приблизительного периода основной частоты колебаний прилипания-проскальзывания и от действующего момента инерции бурильного механизма, при этом бурильный механизм имеет зависящий от частоты коэффициент отражения крутильных волн, по существу, минимальный на основной частоте колебаний прилипания-проскальзывания или вблизи нее.
3. Способ по п.2, дополнительно содержащий этап корректировки параметра I согласно формуле:
4. Способ по п.2 или 3, в котором действующий момент инерции бурильного механизма содержит общий механический момент инерции бурильного механизма на его выходном валу.
5. Способ по любому из пп.1-3, в котором этап уменьшения действующего момента инерции бурильного механизма содержит настройку пропорционально-интегрального регулятора с дополнительным параметром крутящего момента, пропорциональным угловому ускорению бурильного механизма.
6. Способ по п.5, дополнительно содержащий этап умножения углового ускорения бурильного механизма на компенсационный момент (Jc) инерции, регулируемый для контроля величины уменьшения действующего момента инерции бурильного механизма.
7. Способ по п.6, в котором компенсационный момент инерции уменьшает действующий момент инерции бурильного механизма на 0-80%.
8. Способ по п.5, дополнительно содержащий этап корректировки параметра I согласно формуле:
9. Способ по одному из пп.1-3, в котором бурильный механизм имеет ширину полосы поглощения крутильной энергии для рабочих частот колебаний прилипания-проскальзывания бурильной колонны, при этом величина указанной ширины полосы поглощения получена из половины максимума его полной ширины, и при уменьшении действующего момента инерции бурильного механизма величина половины максимума полной ширины является большей.
10. Способ по одному из пп.1-3, в котором бурильный механизм имеет кривую демпфирования в зависимости от частоты, имеющую точку максимального демпфирования, и способ дополнительно содержит этап смещения указанной точки к более высоким частотам, при этом демпфирующий эффект бурильного механизма на, по меньшей мере, части более высоких частот увеличивается, и демпфирование основной частоты колебаний прилипания-проскальзывания уменьшается.
11. Способ по п.10, в котором этап смещения точки максимального демпфирования к более высоким частотам содержит определение параметра I пропорционально-интегрального регулятора согласно формуле:
12. Способ по п.11, в котором величина указанного периода превышает величину приблизительного периода на величину, составляющую до 40%.
13. Способ по п.11, который дополнительно содержит этап дальнейшего уменьшения действующего момента инерции бурильного механизма при осуществлении указанного этапа смещения, при этом предотвращая сужение ширины полосы поглощения демпфирующей кривой.
14. Способ по п.13, который дополнительно содержит этап дальнейшего уменьшения действующего момента инерции бурильного механизма и увеличение указанного периода на один и тот же коэффициент.
15. Способ по одному из пп.1-3, в котором этап уменьшения действующего момента инерции бурильного механизма содержит переключение на более высокую передачу бурильного механизма.
16. Способ по одному из пп.1-3, в котором этапы а)-г) осуществляются после этапа мониторинга бурильного механизма при обнаружении появления, по меньшей мере, одной более высокой моды колебаний.
17. Способ по одному из пп.1-3, который дополнительно содержит этапы мониторинга периода основной частоты, сравнение указанного периода с пороговым периодом и при превышении порогового периода уменьшение действующего момента инерции при увеличении указанного периода.
18. Способ бурения ствола скважины, содержащий следующие этапы:
а) вращение бурильной колонны с бурильным механизмом для вращения бурового долота на нижнем конце бурильной колонны и прохождения поверхности Земли;
б) при обнаружении колебаний прилипания-проскальзывания бурильной колонны демпфирование указанных колебаний согласно способу по одному из пп.1-17.
19. Бурильный механизм для использования в бурении ствола скважины, содержащий электронный регулятор, имеющий пропорционально-интегральный регулятор и запоминающее устройство, сохраняющее исполняемые компьютером инструкции, при исполнении которых бурильный механизм способен демпфировать колебания прилипания-проскальзывания бурильной колонны согласно этапам способа по любому из пп.1-17.
20. Бурильный механизм по п.19, в котором пропорционально-интегральный регулятор содержит пропорционально-интегрально-дифференциальный регулятор, выполняющий следующее условие: Jc* dΩ/dt, где Jc - регулируемый пользователем или компьютером компенсационный момент инерции и Ω - измеренная угловая скорость бурильного механизма.
21. Электронный регулятор для использования с бурильным механизмом для бурения ствола скважины, содержащий пропорционально-интегральный регулятор и запоминающее устройство, сохраняющее исполняемые компьютером инструкции, при исполнении которых электронный регулятор способен контролировать бурильный механизм для демпфирования колебаний прилипания-проскальзывания бурильной колонны согласно этапам способа по любому из пп.1-17.
22. Способ модернизации бурильного механизма на буровой установке, содержащий этапы загрузки исполняемых компьютером инструкций в электронный регулятор на буровой установке, причем электронный регулятор предназначен для регулирования действия бурильного механизма, при этом исполняемые компьютером инструкции содержат инструкции для выполнения способа согласно любому из пп.1-17.
| US 5117926 A, 02.06.1992 | |||
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРОПРИВОДА РЕГУЛЯТОРА ПОДАЧИ ДОЛОТА | 1996 |
|
RU2108456C1 |
| ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОР | 2002 |
|
RU2234116C1 |
| US 4535972 A, 20.08.1985 | |||
| СЕТКА ДЛЯ НОШЕНИЯ РЕБЕНКА | 1926 |
|
SU5610A1 |

