Изобретения относятся к области гидроакустики и могут быть использованы для оперативного контроля шумоизлучения подводного объекта в натурном водоеме.
Известно устройство аналогичного назначения, содержащее корпус, выполненный в виде стакана с шарнирно закрепленной в его верхней части подвеской, носитель аппаратуры и спуско-подъемное устройство. Внутри и на поверхности носителя аппаратуры установлены гидроакустические преобразователи /Патент РФ на изобретение №2300479, кл. В63В 22/06, В63В 22/04, В63В 22/00, 2007/.
Недостатком устройства является стационарный характер его установки в натурном водоеме и отсутствие в устройстве системы для проверки его рабочего состояния.
Известна система для проверки рабочего состояния устройства для измерения подводного шума плавсредства, состоящая из генератора механических колебаний, на котором закреплен пьезоэлектрический гидрофон. Система позволяет проверить работоспособность устройства на его штатном месте /Патент РФ на изобретение №2172272, кл. В63В 22/00, 2001/.
Недостатком системы является продолжительное время проверки работоспособности устройства на различных частотах тестового сигнала.
Известно устройство для измерения подводного шума плавсредства, содержащее установленный в корпусе измерительный модуль и лебедку, кинематически связанные с измерительным модулем с помощью гибкого кабеля, и блок управления, при этом измерительный модуль выполнен в виде звукопрозрачного носителя аппаратуры обтекаемой формы положительной плавучести с расположенным внутри него широкополосным гидрофоном и датчиком гидростатического давления, а лебедка - в виде вертикально расположенной катушки с механизмом намотки и вытравливания гибкого кабеля, причем измерительный модуль, лебедка и блок управления в начальном положении расположены на борту исследуемого плавсредства /Патент на изобретение РФ №2172272, кл. В63В 22/00, 2001/.
Известное техническое решение может быть реализовано с той же совокупностью признаков не только для надводного, но и подводного плавсредства.
Данное устройство принято за прототип предлагаемого устройства. Недостатком прототипа является стационарный характер установки устройства в натурном водоеме.
Известна система для проверки работоспособности гидроакустического устройства на его штатном месте, принятая за прототип, содержащая забортную часть и комплексы управления, обработки и отображения информации, соединенные гибким кабелем, при этом забортная часть выполнена в виде пьезочувствительного элемента, линейного усилителя и электрического эквивалента, подключенных через управляемый переключатель ко входу комплекса обработки, при этом комплексы управления обработки и отображения информации расположены на борту плавсредства /Патент на изобретение РФ №2450479, кл. H04R 1/44, 2012/.
Недостатком прототипа системы является необходимость проведения температурных измерений электрического эквивалента, выполненного в виде резистора.
Техническим результатом, получаемым при реализации устройства для измерения подводного шума плавсредства, является получение возможности измерений уровня шума подводного плавсредства непосредственно с самого плавсредства.
Техническим результатом, получаемым от внедрения системы для проверки рабочего состояния устройства для измерения подводного шума, является возможность проведения проверки работоспособности устройства непосредственно с подводного плавсредства без необходимости проведения температурных измерений электрического эквивалента гидрофона.
Данный технический результат достигается за счет того, что устройство для измерения шума подводного плавсредства, содержащее установленный в корпусе измерительный модуль и лебедку, кинематически связанную с измерительным модулем с помощью гибкого кабеля, и блок управления, при этом измерительный модуль выполнен в виде звукопрозрачного носителя аппаратуры обтекаемой формы положительной плавучести с расположенными внутри него широкополосным гидрофоном и датчиком гидростатического давления, а лебедка - в виде вертикально расположенной катушки с механизмом намотки и вытравливания гибкого кабеля, причем измерительный модуль, лебедка и блок управления расположены на борту исследуемого плавсредства, дополнительно снабжено ложементом измерительного модуля, установленным в верхней части корпуса, и фиксаторами измирительного модуля, выполненными в виде рычагов-захватов, установленных на валу управляемого электродвигателя.
Измерительный модуль снабжен дополнительным низкочастотным гидрофоном с модулем коммутации.
Измерительный модуль выполнен в форме усеченного конуса.
Устройство дополнительно содержит блок амортизаторов измерительного модуля.
Блок амортизаторов измерительного модуля выполнен в виде плиты с расположенными на ней упругими пластиковыми кольцами.
Устройство дополнительно содержит датчик положения измирительного модуля.
Датчик положения измерительного модуля выполнен в виде герконовой пары, подвижный магнит которой установлен в соответствующем месте гибкого кабеля.
Устройство содержит второй датчик гидростатического давления, установленный в корпусе.
В части системы для проверки рабочего состояния устройства для измерения шума подводного плавсредства, содержащей забортную часть и комплексы управления, обработки и отображения информации, соединенные гибким кабелем, при этом забортная часть выполнена в виде пьезочувствительного элемента, линейного усилителя и электрического эквивалента, подключенных через управляемый переключатель ко входу комплекса обработки информации, при этом комплексы управления, обработки и отображения информации расположены на борту плавсредства, электрический эквивалент, выполнен в виде двух генераторов белого шума, спектральные плотности выходных сигналов которых различаются на заданную величину.
Система дополнительно содержит второй пьезочувствительный элемент, подключенный через управляемый переключатель ко входу комплекса обработки.
Комплекс обработки информации содержит последовательно соединенные управляемые фильтры высоких и низких частот с элементами управления, подключенные к комплексу управления.
Комплекс обработки информации дополнительно содержит усилитель с регулируемым коэффициентом усиления и элемент управления, подключенный к комплексу управления.
Комплекс управления дополнительно содержит разветвитель выходного сигнала с гальванической развязкой на несколько потребителей, управляемый вход которого подключен к выходу комплекса управления.
Изобретения поясняются чертежами.
На фиг. 1 представлена схема устройства в собранном состоянии на борту плавсредства;
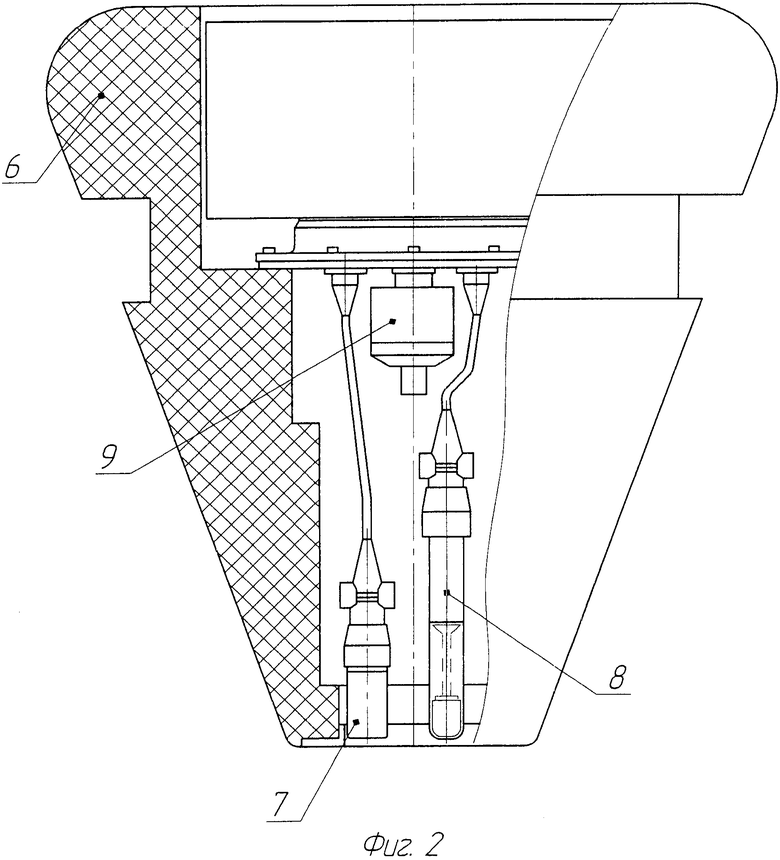
На фиг. 2 - схема измерительного модуля носителя аппаратуры;
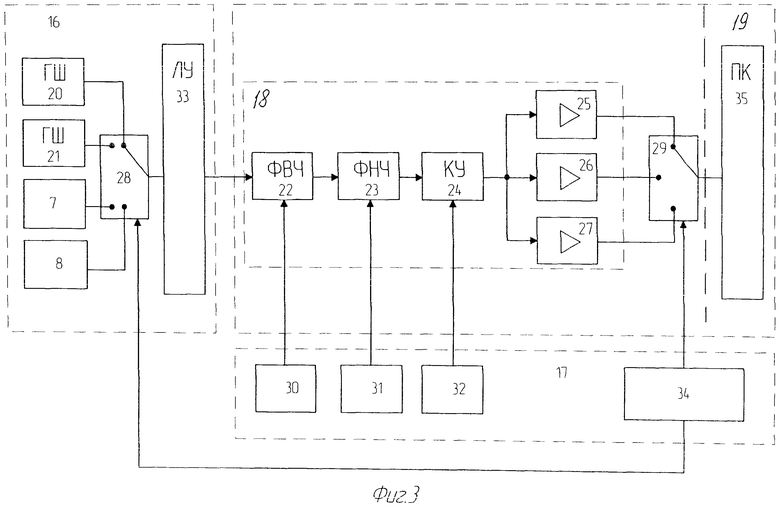
На фиг. 3 - электрическая схема системы для проверки работоспособности устройства с борта плавсредства.
Устройство содержит (фиг. 1) установленные в корпусе 1 измерительный модуль 2 (ИМ 2), лебедку в виде вертикально расположенной катушки 3, кинематически связанную с ИМ 2 с помощью гибкого кабеля 4 через механизм 5 намотки и вытравливания гибкого кабеля 4.
ИМ 2 (фиг. 2) выполнен в виде звукопрозрачного носителя 6 положительной плавучести с расположенным внутри него широкополосным 7 и низкочастотным 8 гидрофонами и датчиком 9 гидростатического давления.
Носитель 6 выполнен в форме усеченного конуса и содержит фиксаторы в виде рычагов захватов 10, установленных на валу управляемого электродвигателя 11 (фиг. 1).
Имеются также ложемент 12 ИМ 2, установленный в верхней части корпуса 1, амортизаторы ИМ 2, выполненные в виде плиты с расположенными на ней пластиковыми кольцами (на чертеже не показаны), и датчик положения ИМ 2, выполненный в виде герконовой пары, подвижный магнит которой закреплен на гибком кабеле 4 (датчик положения на чертеже не показан).
В корпусе 1 установлен второй датчик 13 гидростатического давления и электродвигатель 14 лебедки с редуктором (не оцифрован), а также модуль 15 коммутации для подключения к измерительной схеме по команде с блока управления соответствующего элемента ИМ 2. Схема системы для проверки рабочего состояния устройства для измерения подводного шума плавсредства представлена на фиг. 3.
Система содержит забортную часть 16 и бортовые комплексы 17, 18, 19 управления, обработки и отображения информации, соединенные гибким кабелем, расположенные на плавсредстве (фиг. 3). Обозначения 18, 19 условны, поскольку часть элементов комплекса 19 отображения входит в комплекс 18 обработки.
В забортную часть 16 входят два генератора 20, 21 белого шума (ГШ 20 и ГШ 21), спектральные плотности выходных сигналов которых различаются на заданную величину.
В бортовой комплекс 18 обработки информации входят фильтр 22 высоких частот (ФВЧ 22), фильтр 23 низких частот (ФНЧ 23), усилитель 24 с регулируемым коэффициентом усиления (КУ 24) и согласующие усилители 25, 26, 27 гальванической развязки.
В забортной и бортовой частях аппаратуры имеются также два переключателя 28, 29, управляемые от комплекса 17 управления.
Комплекс 17 управления содержит блоки 30, 31 управления частотой среза ФВЧ 22 и ФНЧ 23 и блок 32 управления коэффициентом Ку усилителя 24.
Частота FсрезаФВЧ 22 с помощью блока 30 может задаваться Fсреза=5 Гц; 10 Гц; 20 Гц; 40 Гц.
Частота Fсреза с помощью блока 31 управления у ФНЧ 23 может задаваться Fcpeзa=12,5 кГц и 100 кГц.
Коэффициент Ку у усилителя 24 может задаваться с помощью блока 32 управления Ку=минус 10 дБ; 0 дБ; 20 дБ; 30 дБ; 40 дБ.
Кроме того, с помощью блоков 30, 31 управления ФВЧ 22 и ФНЧ 23 могут отключаться.
ФВЧ 22, ФНЧ 23 и Ку 24 соединены последовательно. Вся последовательная цепочка подключена входом к выходу линейного усилителя 33 забортной части 16 системы, а выходом - к параллельно соединенным трем согласующим усилителям 25, 26, 27 гальванической развязки.
Управляемые переключатели 28, 29 соединены управляемыми входами с блоком 34 комплекса 17 управления.
Выходы согласующих усилителей 25, 26, 27 гальванической развязки через управляемый переключатель 29 подключены к персональному компьютеру 35 (ПК 35) или другому блоку отображения.
Устройство для измерения подводного шума плавсредства и система для бездемонтажной проверки его рабочего состояния работают следующим образом.
После своей штатной работы плавсредство останавливается. Оператор направляет с блока управления на управляемый электродвигатель 11 командный сигнал, под действием которого электродвигатель 11 отводит в стороны фиксаторы ИМ 2, выполненные в виде рычагов-захватов 10, и носитель 6 под действием положительной плавучести начинает всплывать.
Одновременно с блока управления на электродвигатель 14 лебедки через модуль 15 коммутации подается командный сигнал для стравливания гибкого кабеля 4 с катушки.
Высота подъема носителя 6 над плавсредством определяется из разности гидростатических давлений, измеряемых датчиками 9 и 13. При достижении заданной высоты подъема датчик положения ИМ 2 (на чертеже не показан) выдает сигнал о прекращении работы электродвигателей 11, 14 и носитель 6 аппаратуры зависает на заданном расстоянии над исследуемым плавсредством.
Производятся измерения собственного шума плавсредства сначала с помощью, например, низкочастотного гидрофона 8, а затем с помощью широкополосного гидрофона 7.
Перед началом и концом всех метрологических работ осуществляют проверку работоспособности измерительного прибора.
Для этого с помощью управляемого переключателя 28 отключают от измерительного тракта гидрофоны 7, 8 и поочередно подключают к нему ГШ 20 и ГШ 21 при заданных настройках ФВЧ 22, ФНЧ 23, Ку 24 и переключателя 29.
ПК 35 рассчитывает отношение выходных сигналов при последовательном подключении к гидрофонному тракту ГШ 20 и ГШ 21. Если отношение выходных сигналов равно отношению входных сигналов, то проверяемое измерительное устройство считается работоспособным.
При окончании метрологических работ включают в работу электродвигатель 14 и начинает работать механизм 5 намотки на катушку 3 гибкого кабеля 4. Когда датчик положения гибкого кабеля 4 покажет размещение носителя 6 на своем штатном месте, на ложементе 12 плавсредства срабатывают рычаги-захваты 10 с помощью электродвигателя 11.
Таким образом с помощью данного устройства возможно измерение гидроакустического шума плавсредства непосредственно с самого плавсредства, а с помощью данной системы возможна бездемонтажная проверка рабочего состояния устройства.
Этим достигается поставленный технический результат.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТАЦИОНАРНЫЙ ИЗМЕРИТЕЛЬНЫЙ ГИДРОАКУСТИЧЕСКИЙ КОМПЛЕКС | 2005 |
|
RU2300479C2 |
| СТАНЦИЯ КОНТРОЛЯ УРОВНЕЙ ШУМОВ МОРСКИХ НЕФТЕГАЗОВЫХ КОМПЛЕКСОВ | 2011 |
|
RU2480789C2 |
| СПОСОБ КОНТРОЛЯ ПОДВОДНОГО ШУМА ПЛАВСРЕДСТВА С ПОМОЩЬЮ ЗАБОРТНОГО ГИДРОАКУСТИЧЕСКОГО СРЕДСТВА ИЗМЕРЕНИЙ (ВАРИАНТЫ) | 2013 |
|
RU2533327C2 |
| МАЛОГАБАРИТНЫЙ ДОННЫЙ СЕЙСМИЧЕСКИЙ МОДУЛЬ | 2014 |
|
RU2554283C1 |
| МАЛОГАБАРИТНЫЙ ДОННЫЙ СЕЙСМИЧЕСКИЙ МОДУЛЬ | 2013 |
|
RU2549606C2 |
| Способ навигационного оборудования морского района и самоходный подводный аппарат для его осуществления и арктическая подводная навигационная система для вождения и навигационного обеспечения надводных и подводных объектов навигации в стесненных условиях плавания | 2021 |
|
RU2773538C1 |
| ГИДРОАКУСТИЧЕСКАЯ ИЗМЕРИТЕЛЬНАЯ СИСТЕМА | 2000 |
|
RU2199835C2 |
| СПОСОБ КОНТРОЛЯ РАБОТОСПОСОБНОСТИ ИЗМЕРИТЕЛЬНОГО ТРАКТА В НАТУРНЫХ УСЛОВИЯХ И ГИДРОФОННЫЙ ТРАКТ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2526897C1 |
| СИСТЕМА ОБНАРУЖЕНИЯ И РЕГИСТРАЦИИ ГИДРОАКУСТИЧЕСКИХ И ГИДРОДИНАМИЧЕСКИХ ВОЗДЕЙСТВИЙ | 2015 |
|
RU2587523C1 |
| Комплекс для сейсморазведки в транзитных зонах на основе мультилинейной цифровой кабельной антенны | 2016 |
|
RU2650097C1 |
Изобретения относятся к области гидроакустики и могут быть использованы для контроля уровня шумоизлучения подводного объекта в натурном водоеме. Техническим результатом, получаемым от внедрения изобретений, является получение возможности измерений уровня шума подводного плавсредства непосредственно с самого плавсредства. Данный технический результат достигается тем, что с плавсредства поднимают измерительный модуль (ИМ), оснащенный гидрофонами, и с помощью него измеряют уровень шумоизлучения плавсредства. ИМ снабжен системой проверки его работоспособности без демонтажа устройства. 2 н. и 11 з.п. ф-лы, 3 ил.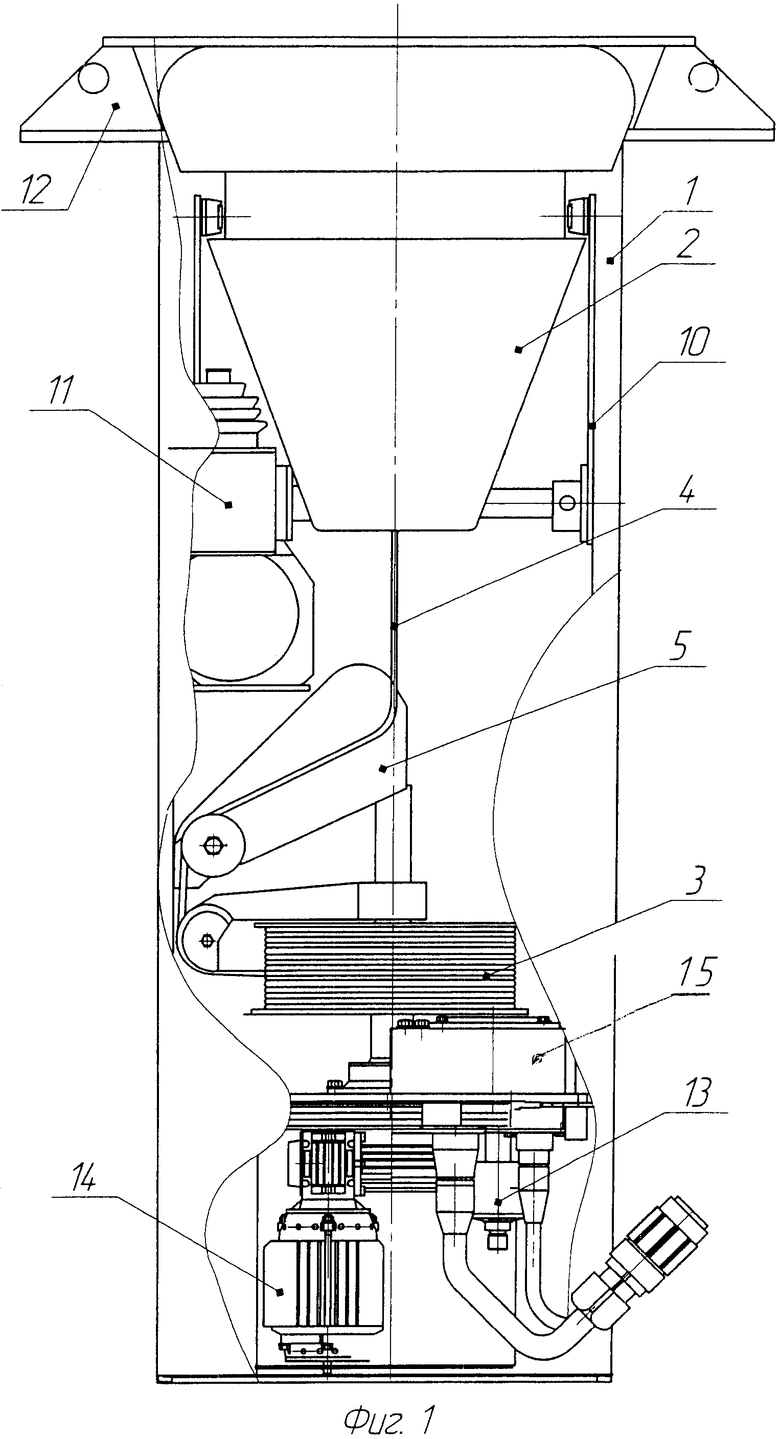
1. Устройство для измерения шума подводного плавсредства, содержащее установленный в корпусе измерительный модуль и лебедку, кинематически связанную с измерительным модулем с помощью гибкого кабеля, и блок управления, при этом измерительный модуль выполнен в виде звукопрозрачного носителя аппаратуры обтекаемой формы положительной плавучести с расположенными внутри него широкополосным гидрофоном и датчиком гидростатического давления, а лебедка - в виде вертикально расположенной катушки с механизмом намотки и вытравливания гибкого кабеля, причем измерительный модуль, лебедка и блок управления расположены на борту исследуемого плавсредства, отличающееся тем, что дополнительно снабжено ложементом измерительного модуля, установленным в верхней части корпуса, и фиксаторами измерительного модуля, выполненными в виде рычагов захватов, установленных на валу управляемого электродвигателя.
2. Устройство по п. 1, отличающееся тем, что измерительный модуль снабжен дополнительным низкочастотным гидрофоном с модулем коммутации.
3. Устройство по п. 1, отличающееся тем, что измерительный модуль выполнен в форме усеченного конуса.
4. Устройство по п. 1, отличающееся тем, что дополнительно содержит блок амортизаторов измерительного модуля.
5. Устройство по п. 4, отличающееся тем, что блок амортизаторов измерительного модуля выполнен в виде плиты с расположенными на ней упругими пластиковыми кольцами.
6. Устройство по п. 1, отличающееся тем, что дополнительно содержит датчик положения измерительного модуля.
7. Устройство по п. 6, отличающееся тем, что датчик положения измерительного модуля выполнен в виде герконовой пары, подвижный магнит которой установлен в соответствующем месте гибкого кабеля.
8. Устройство по п. 1, отличающееся тем, что устройство содержит второй датчик гидростатического давления, установленный в корпусе.
9. Система для проверки рабочего состояния устройства для измерения подводного шума подводного плавсредства, содержащая забортную часть и комплексы управления, обработки и отображения информации, соединенные гибким кабелем, при этом забортная часть выполнена в виде пьезочувствительного элемента, линейного усилителя и электрического эквивалента, подключенных через управляемый переключатель к входу комплекса обработки информации, при этом комплексы управления, обработки и отображения информации расположены на борту плавсредства, отличающаяся тем, что электрический эквивалент выполнен в виде двух генераторов белого шума, спектральные плотности выходных сигналов которых различаются на заданную величину.
10. Система по п. 9, отличающаяся тем, что дополнительно содержит второй пьезочувствительный элемент, подключенный через управляемый переключатель ко входу комплекса обработки.
11. Система по п. 9, отличающаяся тем, что комплекс обработки информации содержит последовательно соединенные управляемые фильтры высоких и низких частот с элементами управления, подключенные к комплексу управления.
12. Система по п. 9, отличающаяся тем, что комплекс обработки дополнительно содержит усилитель с регулируемым коэффициентом усиления и элемент управления, подключенный к комплексу управления.
13. Система по п. 9, отличающаяся тем, что комплекс управления дополнительно содержит управляемый разветвитель выходного сигнала с гальванической развязкой на несколько потребителей, управляемый вход которого подключен к выходу комплекса управления.
| СТАЦИОНАРНЫЙ ИЗМЕРИТЕЛЬНЫЙ ГИДРОАКУСТИЧЕСКИЙ КОМПЛЕКС | 2005 |
|
RU2300479C2 |
| СПОСОБ ИЗМЕРЕНИЯ УРОВНЯ ДАВЛЕНИЯ ШУМОИЗЛУЧЕНИЯ ДВИЖУЩЕГОСЯ ОБЪЕКТА В НАТУРНОМ ВОДОЕМЕ | 2000 |
|
RU2178629C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ШУМНОСТИ ПЛАВСРЕДСТВА С ПОМОЩЬЮ ЛАЗЕРНОГО ГИДРОФОНА | 1999 |
|
RU2167500C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УРОВНЕЙ ДАВЛЕНИЯ ГИДРОАКУСТИЧЕСКИХ ПОЛЕЙ ПЛАВСРЕДСТВА | 1998 |
|
RU2141740C1 |
| Осколочная боевая часть | 2017 |
|
RU2658691C1 |

