Область техники, к которой относится изобретение
[0001] Данное изобретение относится к управлению осевым усилием шкива бесступенчатой трансмиссии, использующей бесконечный элемент передачи крутящего момента, такой как клиновидная цепь и пара шкивов.
Уровень техники
[0002] JP 2009-144751 A, опубликованная Патентным бюро (Япония) в 2009 году, предлагает то, что в бесступенчатой трансмиссии (CVT) для транспортного средства, в которой бесконечный элемент передачи крутящего момента, такой как клиновидная цепь, оборачивается вокруг пары шкивов, включающей в себя первичный шкив и вторичный шкив, отклик при изменении скорости улучшается посредством надлежащего задания жесткости шкивов.
[0003] Каждый из первичного шкива и вторичного шкива изменяет ширину V-образного паза в соответствии с осевым усилием шкива, прикладываемым в направлении оси вращения, чтобы изменять радиус оборачивания клиновидной цепи. Таким образом, изменяется отношение между частотами вращения шкивов, т.е. передаточное число. Осевые усилия шкивов получаются за счет гидравлического давления гидравлического насоса при использовании двигателя внутреннего сгорания, смонтированного в транспортном средстве в качестве источника энергии.
[0004] В CVT, описанной выше, если возникает проскальзывание между клиновидной цепью и каким-либо из шкивов, оказывается негативное влияние на передачу крутящего момента между шкивами. Чтобы не допускать возникновения проскальзывания между клиновидной цепью и шкивами, к шкивам должно прикладываться предварительно определенное осевое усилие. Предварительно определенное осевое усилие в дальнейшем называется осевым усилием для ограничения проскальзывания. Осевое усилие для ограничения проскальзывания является значением, общим для первичного шкива и вторичного шкива, и определяется в зависимости от радиуса оборачивания клиновидной цепи вокруг первичного шкива. Осевое усилие для ограничения проскальзывания вычисляется посредством следующего выражения (1):
[0005]
[0006] где: Fmin - осевое усилие для ограничения проскальзывания,
Tp - входной крутящий момент в первичный шкив,
α - угол установки направляющего ролика,
µ - коэффициент трения клиновидной цепи и шкивов, и
Rp - радиус оборачивания клиновидной цепи вокруг первичного шкива.
[0007] В этом выражении угол α установки направляющего ролика является константой, которая определяется заранее посредством форм и размеров первичного шкива, вторичного шкива и клиновидной цепи. Коэффициент µ трения является константой, которая определяется заранее посредством материалов первичного шкива, вторичного шкива и клиновидной цепи.
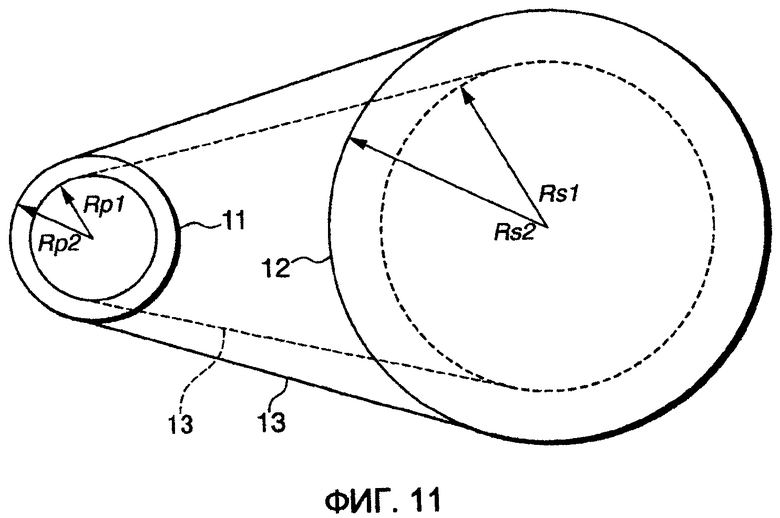
[0008] Ссылаясь на фиг. 11, в CVT, которая передает крутящий момент через клиновидную цепь, когда клиновидная цепь растягивается, радиусы оборачивания вокруг шкивов изменяются при идентичном передаточном числе. Следующее выражение (2) выражает взаимосвязь между передаточным числом и радиусами оборачивания:
[0009] 
[0010] где: ip - передаточное число,
Rp1 - радиус оборачивания вокруг первичного шкива, когда растяжение клиновидной цепи является небольшим,
Rs1 - радиус оборачивания вокруг вторичного шкива, когда растяжение клиновидной цепи является небольшим,
Rp2 - радиус оборачивания вокруг первичного шкива, когда растяжение клиновидной цепи является большим, и
Rs2 - радиус оборачивания вокруг вторичного шкива, когда растяжение клиновидной цепи является большим.
[0011] Как можно понять из выражения (1), когда клиновидная цепь растягивается, увеличивается радиус оборачивания клиновидной цепи вокруг каждого из шкивов. Как результат, осевое усилие для ограничения проскальзывания становится меньше.
[0012] Следовательно, если осевые усилия шкивов управляются на основе осевого усилия для ограничения проскальзывания, которое вычисляется без учета растяжения клиновидной цепи, осевые усилия шкивов становятся чрезмерно большими в случае, если клиновидная цепь растягивается. Как результат, возрастают потери в гидравлическом давлении или потери на трение, что приводит к повышению расхода топлива двигателя внутреннего сгорания, который приводит в действие гидравлический насос.
[0013] Следовательно, задача этого изобретения состоит в том, чтобы реализовывать надлежащее управление осевым усилием шкива в соответствии с тем, растягивается или нет бесконечный элемент передачи крутящего момента.
Сущность изобретения
[0014] Устройство управления передаточным числом согласно этому изобретению применяется к бесступенчатой трансмиссии, содержащей бесконечный элемент передачи крутящего момента, замкнутый кольцом вокруг пары шкивов. Один из шкивов имеет подвижный направляющий ролик, выполненный с возможностью смещаться в осевом направлении в соответствии с прикладываемым осевым усилием шкива, чтобы изменять радиус оборачивания бесконечного элемента передачи крутящего момента. Устройство управления передаточным числом содержит датчик, который определяет рабочий режим бесступенчатой трансмиссии, и программируемый контроллер. Программируемый контроллер запрограммирован с возможностью вычислять величину растяжения бесконечного элемента передачи крутящего момента на основе рабочего режима бесступенчатой трансмиссии и осевого усилия для ограничения проскальзывания в соответствии с величиной растяжения и управлять осевым усилием шкива для одного из шкивов на основе осевого усилия для ограничения проскальзывания.
[0015] Подробности, а также другие признаки и преимущества этого изобретения изложены в оставшейся части подробного описания и показаны на прилагаемых чертежах.
Краткое описание чертежей
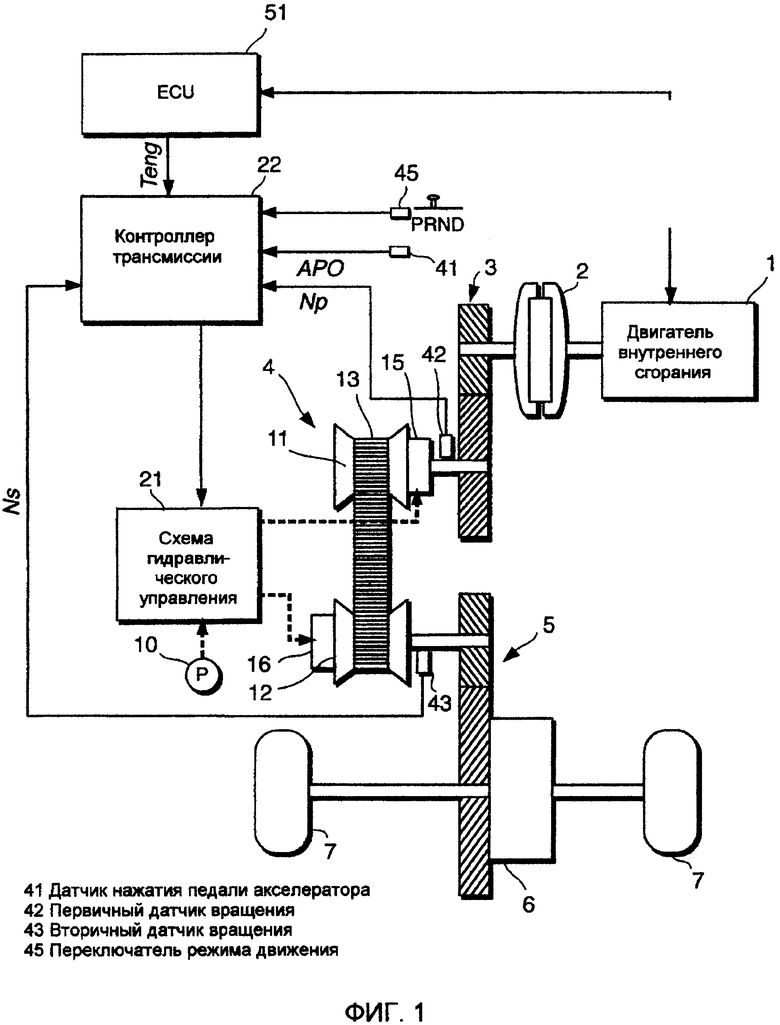
[0016] Фиг. 1 является принципиальной схемой устройства управления передаточным числом для бесступенчатой трансмиссии согласно варианту осуществления этого изобретения.
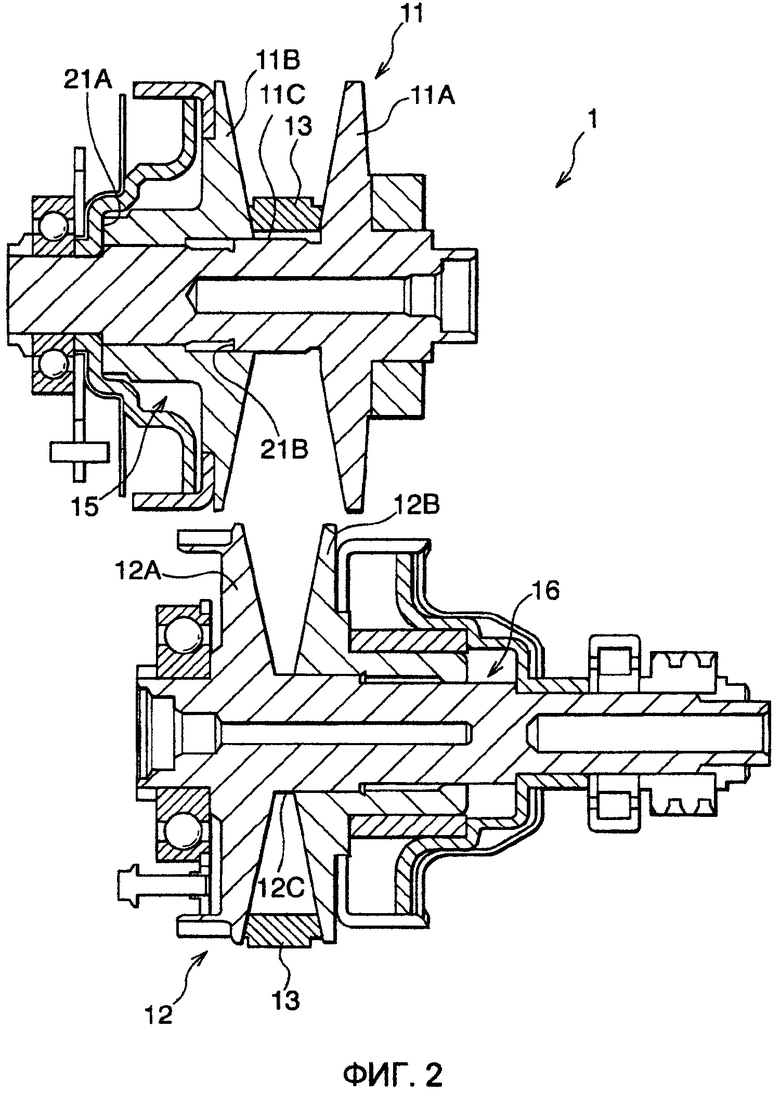
Фиг. 2 является горизонтальным видом в разрезе бесступенчатой трансмиссии.
Фиг. 3 является блок-схемой последовательности операций способа, иллюстрирующей процедуру управления трансмиссией, выполняемую посредством контроллера трансмиссии согласно варианту осуществления этого изобретения.
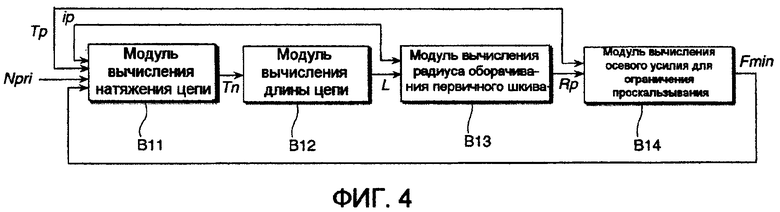
Фиг. 4 является блок-схемой, иллюстрирующей вычисление сходимости осевого усилия для ограничения проскальзывания посредством контроллера трансмиссии.
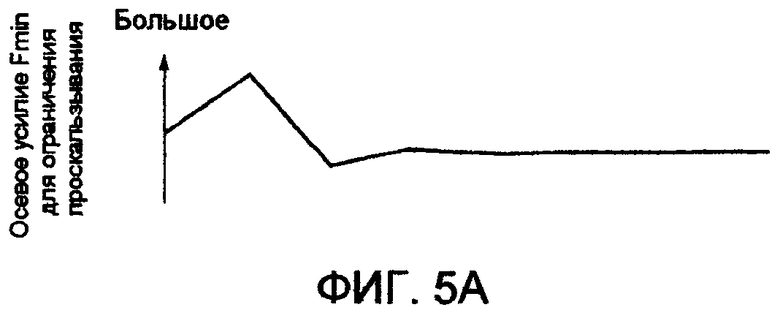
Фиг. 5A и 5B являются временными диаграммами, иллюстрирующими состояние сходимости радиуса оборачивания и осевого усилия для ограничения проскальзывания.
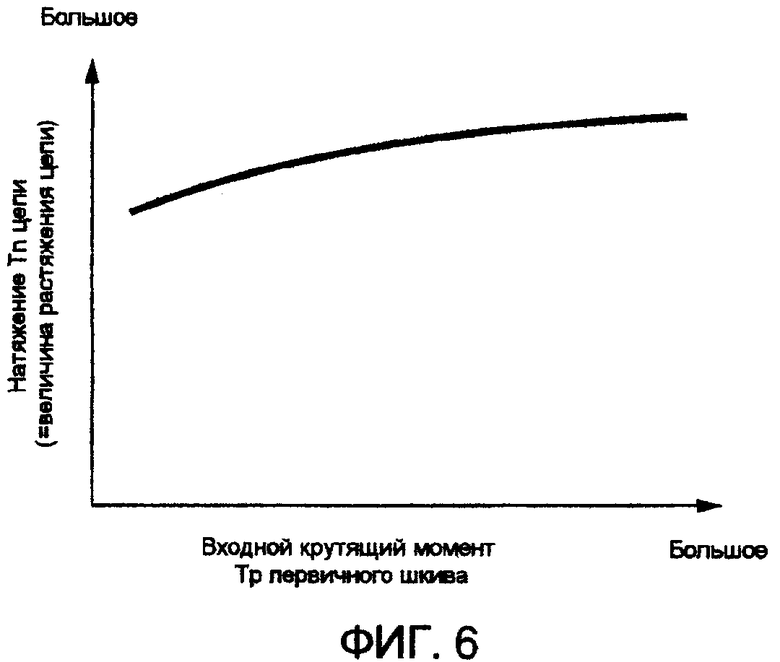
Фиг. 6 является схемой, иллюстрирующей взаимосвязь между входным крутящим моментом в первичный шкив бесступенчатой трансмиссии и натяжением клиновидной цепи посредством моделирования, проведенного авторами этого изобретения.
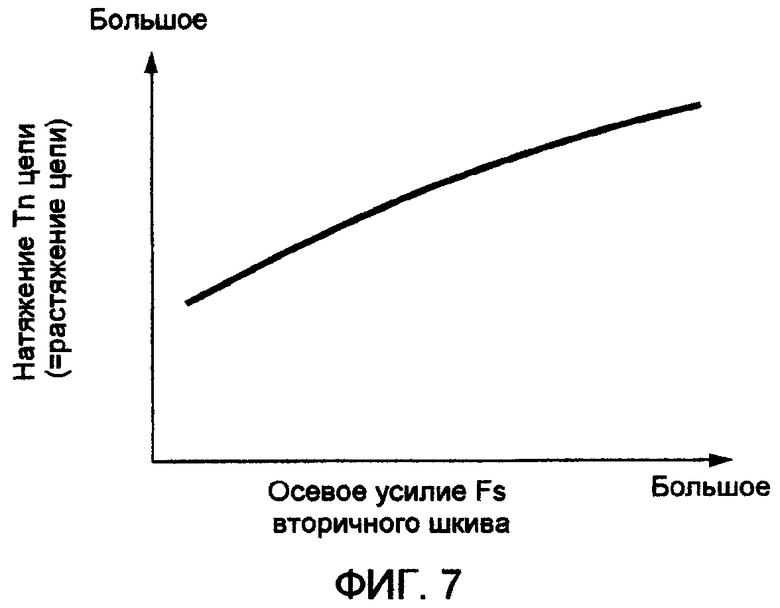
Фиг. 7 является схемой, иллюстрирующей взаимосвязь между осевым усилием во вторичном шкиве бесступенчатой трансмиссии и натяжением клиновидной цепи посредством моделирования, проведенного авторами этого изобретения.
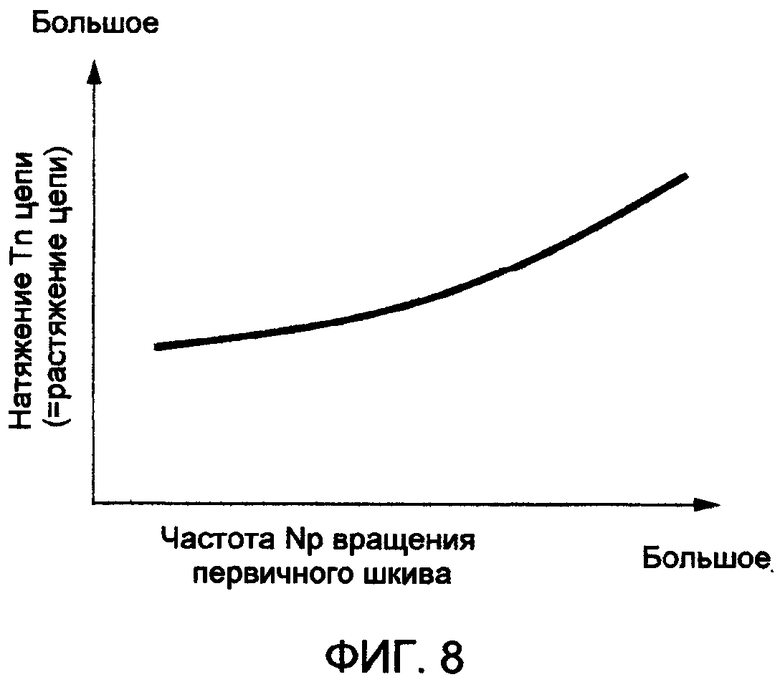
Фиг. 8 является схемой, иллюстрирующей взаимосвязь между частотой вращения первичного шкива и натяжением клиновидной цепи посредством моделирования, проведенного авторами этого изобретения.
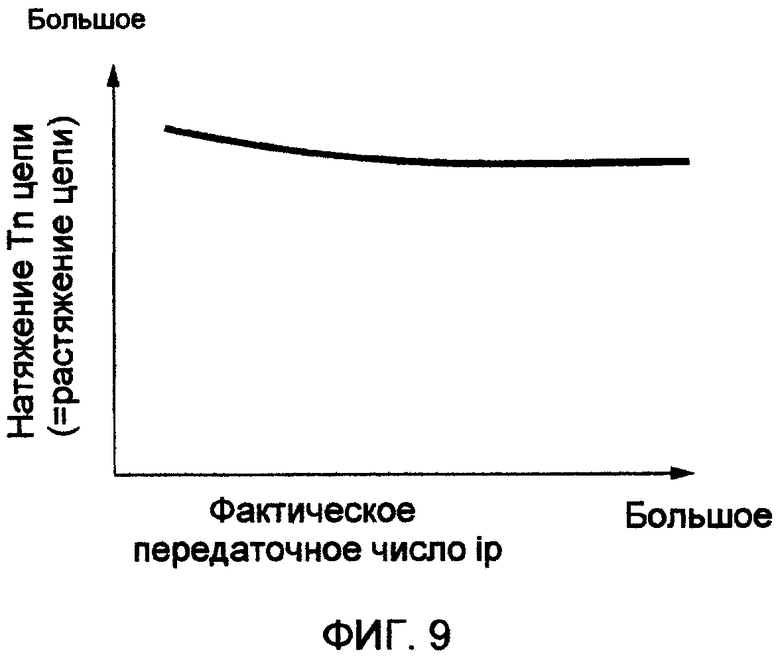
Фиг. 9 является схемой, иллюстрирующей взаимосвязь между передаточным числом и натяжением клиновидной цепи посредством моделирования, проведенного авторами этого изобретения.
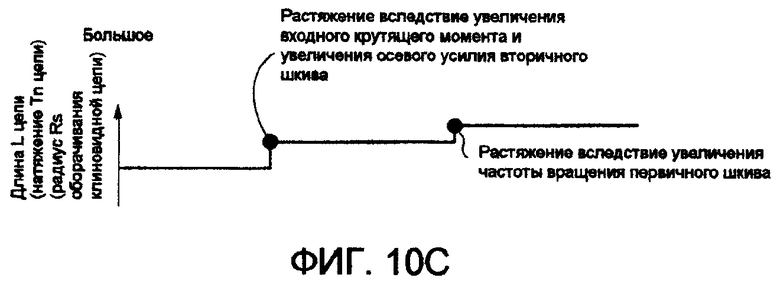
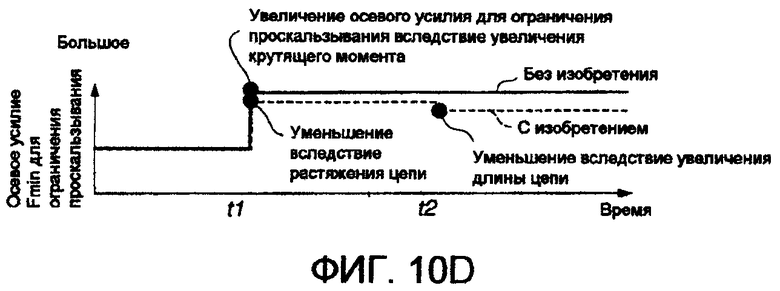
Фиг. 10A-10D являются временными диаграммами, иллюстрирующими состояние задания осевого усилия для ограничения проскальзывания посредством контроллера трансмиссии с учетом растяжения клиновидной цепи.
Фиг. 11 является схематичным видом сбоку клиновидной цепи, обмотанной вокруг первичного шкива и вторичного шкива, для иллюстрации изменения в каждом радиусе оборачивания вследствие растяжения клиновидной цепи.
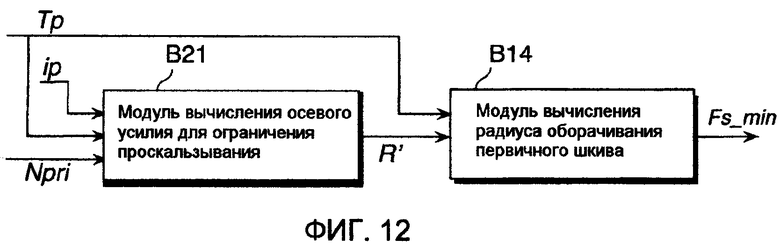
Фиг. 12 является блок-схемой, иллюстрирующей варьирование функции вычисления осевого усилия для ограничения проскальзывания контроллера трансмиссии.
Описание предпочтительных вариантов осуществления
[0017] Ссылаясь на фиг. 1 из чертежей, приводная система транспортного средства содержит двигатель 1 внутреннего сгорания в качестве источника энергии для движения. Вращение двигателя 1 внутреннего сгорания выводится на ведущие колеса 7 через преобразователь 2 крутящего момента, первую зубчатую передачу 3, бесступенчатую трансмиссию 4 (в дальнейшем называемую "CVT"), вторую зубчатую передачу 5 и конечную понижающую передачу 6.
[0018] CVT 4 состоит из механизма цепной бесступенчатой трансмиссии.
[0019] CVT 4 содержит первичный шкив 11, вторичный шкив 12 и клиновидную цепь 13 в качестве бесконечного элемента передачи крутящего момента, замкнутого кольцом вокруг шкивов 11 и 12. Клиновидная цепь 13 имеет V-образное поперечное сечение, имеющее ширину, постепенно снижающуюся к центру клиновидной цепи 13.
[0020] Ссылаясь на фиг. 2, первичный шкив 11 CVT 4 включает в себя неподвижный направляющий ролик 11A и подвижный направляющий ролик 11B. Неподвижный направляющий ролик 11A включает в себя вал 11C шкива. Подвижный направляющий ролик 11B поддерживается на внешней окружности вала 11C шкива таким образом, что он является подвижным в осевом направлении. Подвижный направляющий ролик 11B изменяет расстояние от неподвижного направляющего ролика 11A на валу 11C шкива посредством осевого усилия шкива, прикладываемого посредством гидравлического цилиндра 15 в осевом направлении, тем самым изменяя радиус оборачивания клиновидной цепи 13.
[0021] Вторичный шкив 12 включает в себя неподвижный направляющий ролик 12A и подвижный направляющий ролик 12B. Неподвижный направляющий ролик 12A включает в себя вал 12C шкива. Подвижный направляющий ролик 12B поддерживается на внешней окружности вала 12C шкива таким образом, что он является подвижным в осевом направлении. Подвижный направляющий ролик 12B изменяет расстояние от неподвижного направляющего ролика 12A на валу 12C шкива посредством осевого усилия шкива, прикладываемого посредством гидравлического цилиндра 16 в осевом направлении, тем самым изменяя радиус оборачивания клиновидной цепи 13.
[0022] CVT 4 изменяет радиусы оборачивания клиновидной цепи 13 вокруг первичного шкива 11 и вторичного шкива 12 вышеупомянутым способом с тем, чтобы непрерывно изменять передаточное число. "Передаточное число" является значением, полученным посредством деления входной частоты вращения CVT 4 на выходную частоту вращения CVT 4.
[0023] Первичный шкив 11 содержит стопоры 21A и 21B шкивов. Фрагмент подвижного направляющего ролика 11B, который примыкает к клиновидной цепи 13, упоминается как "дальний конец", тогда как концевой фрагмент на противоположной стороне упоминается как "задний конец". Стопор 21A шкива предоставляется в гидравлическом цилиндре 15 и примыкает к заднему концу подвижного направляющего ролика 11B таким образом, чтобы ограничивать смещение подвижного направляющего ролика 11B в направлении от неподвижного направляющего ролика 11A. Стопор 21B шкива образует ступенчатую форму на внешней окружности вала 12C шкива неподвижного направляющего ролика 11A. На внутренней окружности подвижного направляющего ролика 11B, формируется соответствующая ступень. Ступень подвижного направляющего ролика 11B примыкает к стопору 12B шкива, который ограничивает смещение подвижного направляющего ролика 11B в направлении неподвижного направляющего ролика 11A.
[0024] Стопоры 21A и 21B шкивов могут предоставляться для вторичного шкива 12. Стопоры 21A и 21B шкивов имеют следующие функции. Конкретно:
[0025] (1) стопор 21A шкива предотвращает контактирование клиновидной цепи 13 с валом 11C шкива (12C); и
(2) стопор 21B шкива предотвращает выход клиновидной цепи 13 из клиновидного паза шкива 11 (12).
[0026] Функция (1) требуется в районе максимального передаточного числа в случае первичного шкива 11 и в районе минимального передаточного числа в случае вторичного шкива 12.
[0027] Функция (2) требуется в районе минимального передаточного числа в случае первичного шкива 11 и в районе максимального передаточного числа в случае вторичного шкива 12.
[0028] Описывается случай, в котором стопоры 21A и 22B шкивов предоставляются для первичного шкива 11.
[0029] В районе максимального передаточного числа задний конец подвижного направляющего ролика 11B примыкает к стопору 21A шкива, чтобы задавать минимальное значение радиуса оборачивания клиновидной цепи 13 вокруг первичного шкива 11. Позиция стопора 21A шкива задается таким образом, что ширина фрагмента, имеющего кратчайшую ширину паза, образованного посредством неподвижного направляющего ролика 11A и подвижного направляющего ролика 11B, становится меньше ширины внутренней окружности клиновидной цепи 13 в состоянии, в котором задний конец подвижного направляющего ролика 11B примыкает к стопору 21A шкива, тем самым предотвращая контактирование клиновидной цепи 13 с валом 11C шкива.
[0030] В районе минимального передаточного числа ступень, сформированная на внутренней окружности подвижного направляющего ролика 11B, примыкает к ступенчатому стопору 21B шкива, сформированному на внешней окружности вала 11C шкива, чтобы задавать максимальное значение радиуса оборачивания клиновидной цепи 13 вокруг первичного шкива 11. В это время, радиус поверхности направляющего ролика рассчитывается заранее с учетом растяжения клиновидной цепи 13 таким образом, что клиновидная цепь 13 не выходит из паза, образованного посредством неподвижного направляющего ролика 11A и подвижного направляющего ролика 11B, даже если клиновидная цепь 13 растягивается.
[0031] Описывается случай, в котором стопоры 21A и 21B шкивов предоставляются для вторичного шкива 12.
[0032] В районе минимального передаточного числа задний конец подвижного направляющего ролика 12B примыкает к стопору 21A шкива, чтобы задавать минимальное значение радиуса оборачивания клиновидной цепи 13 вокруг вторичного шкива 12. Позиция стопора 21A шкива задается таким образом, что ширина фрагмента, имеющего кратчайшую ширину паза, образованного посредством неподвижного направляющего ролика 12A и подвижного направляющего ролика 12B, становится меньше ширины внутренней окружности клиновидной цепи 13 в состоянии, в котором задний конец подвижного направляющего ролика 12B примыкает к стопору 21A шкива, тем самым предотвращая контактирование клиновидной цепи 13 с валом 12C шкива.
[0033] В районе максимального передаточного числа ступень, сформированная на внутренней окружности подвижного направляющего ролика 12B, примыкает к ступенчатому стопору 21B шкива, сформированному на внешней окружности вала 11C шкива, чтобы задавать максимальное значение радиуса оборачивания клиновидной цепи 13 вокруг первичного шкива 12. В это время, радиус поверхности направляющего ролика рассчитывается заранее с учетом растяжения клиновидной цепи 13 таким образом, что клиновидная цепь 13 не выходит из паза, образованного посредством неподвижного направляющего ролика 12A и подвижного направляющего ролика 12B, даже если клиновидная цепь 13 растягивается.
[0034] Стопоры 21A и 21B шкивов могут предоставляться для любого из первичного шкива 11 и вторичного шкива 12. В этом варианте осуществления стопоры 21A и 21B шкивов предоставляются для первичного шкива 11, тогда как для вторичного шкива 12 стопор шкива не предоставляется.
[0035] Снова ссылаясь на фиг. 1, управление трансмиссией CVT 4 выполняется посредством гидравлического насоса 10, приводимого в действие посредством использования части мощности двигателя 1 внутреннего сгорания, схемы 21 гидравлического управления для подачи гидравлических давлений в гидравлические цилиндры 15 и 16 бесступенчатой трансмиссии 4 после регулирования гидравлического давления из гидравлического насоса 10 и контроллера 22 трансмиссии для управления схемой 21 гидравлического управления.
[0036] Контроллер 22 трансмиссии состоит из микрокомпьютера, включающего в себя центральный процессор (CPU), постоянное запоминающее устройство (ROM), оперативное запоминающее устройство (RAM) и интерфейс ввода-вывода (интерфейс I/O). Контроллер может состоять из множества микрокомпьютеров.
[0037] В контроллер 22 трансмиссии определяемые данные вводятся в качестве сигналов из датчика 41 нажатия педали акселератора для определения степени APO нажатия педали акселератора, предоставляемой в транспортном средстве в качестве нагрузки двигателя 1 внутреннего сгорания, переключателя 45 режима движения для определения выбранной позиции рычага селектора, предоставляемого в транспортном средстве, первичного датчика 42 вращения для определения частоты Np вращения первичного шкива 11 и вторичного датчика 43 вращения для определения частоты Ns вращения вторичного шкива 12.
[0038] Ссылаясь на фиг. 3, описывается процедура управления трансмиссией для CVT 4, выполняемая посредством контроллера 22 трансмиссии. Процедура многократно выполняется через постоянные интервалы, например в десять миллисекунд в ходе вращения первичного шкива 11.
[0039] На этапе S1 контроллер 22 трансмиссии вычисляет целевое передаточное число Dip посредством известного способа на основе нагрузки двигателя 1 внутреннего сгорания и скорости VSP транспортного средства. В качестве нагрузки двигателя 1 внутреннего сгорания используется степень APO нажатия педали акселератора, определенная посредством датчика 41 нажатия педали акселератора. Скорость VSP транспортного средства вычисляется из частоты Ns вращения вторичного шкива 12 и передаточного отношения второй зубчатой передачи 5 и конечной понижающей передачи 6.
[0040] На этапе S2, посредством известного управления с обратной связью по передаточному числу на основе отклонения между целевым передаточным числом Dip и фактическим передаточным числом ip, вычисляются осевое усилие Fp шкива для первичного шкива 11 и осевое усилие Fs шкива для вторичного шкива 12.
[0041] На этапе S3 контроллер 22 трансмиссии вычисляет осевое усилие Fmin для ограничения проскальзывания. Эта обработка далее описывается подробно.
[0042] Когда изменяются гидравлические давления, поданные в гидравлические цилиндры 15 и 16, подвижный направляющий ролик 11B изменяет расстояние от неподвижного направляющего ролика 11A на валу 11C шкива посредством осевого усилия шкива, прикладываемого посредством гидравлического цилиндра 15 к подвижному направляющему ролику 11B, тем самым изменяя радиус Rp оборачивания клиновидной цепи 13. Подвижный направляющий ролик 12B изменяет расстояние от неподвижного направляющего ролика 12A на валу 12C шкива посредством осевого усилия шкива, прикладываемого посредством гидравлического цилиндра 16 к подвижному направляющему ролику 12B, тем самым изменяя радиус Rs оборачивания клиновидной цепи 13.
[0043] Если значительное проскальзывание возникает между клиновидной цепью 13 и шкивом 11 или 12, на передачу крутящего момента оказывается негативное влияние. Значение слова "значительное проскальзывание" заключается в следующем. Даже во время обычной передачи крутящего момента, клиновидная цепь 13 вызывает очень небольшое проскальзывание относительно каждого из первичного шкива 11 и вторичного шкива 12. Для отличия от очень небольшого проскальзывания, описанного выше, проскальзывание клиновидной цепи 13, которое оказывает негативное влияние на передачу крутящего момента, упоминается как "значительное проскальзывание".
[0044] Чтобы предотвращать возникновение значительного проскальзывания между клиновидной цепью 13 и шкивом 11 или 12, могут быть увеличены гидравлические давления гидравлических цилиндров 15 и 16, которые прикладывают осевые усилия шкивов к шкивам 11 и 12. Тем не менее, чтобы увеличивать гидравлические давления, должно быть увеличено давление на выходе гидравлического насоса 10 для подачи гидравлических давлений в гидравлические цилиндры 15 и 16. Как результат, увеличиваются потери в гидравлическом давлении или потери на трение в системе подачи гидравлического давления, что приводит к повышению расхода топлива двигателя 1 внутреннего сгорания, который приводит в действие гидравлический насос 10.
[0045] Следовательно, на этапе S3 контроллер 22 трансмиссии вычисляет минимальное значение осевого усилия шкива, которое не вызывает значительного проскальзывания клиновидной цепи 13 относительно фактического передаточного числа ip, в качестве осевого усилия Fmin для ограничения проскальзывания. Осевое усилие Fmin для ограничения проскальзывания является значением, общим для первичного шкива 11 и вторичного шкива 12. Контроллер 22 трансмиссии минимизирует энергопотребление, вызываемое посредством работы трансмиссии CVT 4, посредством вычисления осевого усилия Fmin для ограничения проскальзывания с учетом растяжения клиновидной цепи 13.
[0046] Ниже подробно описывается обработка на этапе S3.
[0047] Чтобы предотвращать вызывание значительного проскальзывания бесконечного элемента передачи крутящего момента, такого как клиновидная цепь, обернутая вокруг шкивов, относительно шкивов, осевое усилие, равное или превышающее осевое усилие для ограничения проскальзывания, должно прикладываться к каждому из шкивов.
[0048] Далее описывается базовая логика вычисления осевого усилия для ограничения проскальзывания.
[0049] Когда не учитывается растяжение клиновидной цепи 13, радиус Rp оборачивания клиновидной цепи 13 вокруг первичного шкива 11 может быть геометрически вычислен относительно фактического передаточного числа ip. Следовательно, если не учитывается растяжение клиновидной цепи 13, осевое усилие Fmin для ограничения проскальзывания может быть непосредственно вычислено посредством выражения (1) с использованием значения радиуса оборачивания.
[0050] Тем не менее, если осевое усилие Fs шкива для вторичного шкива 12 задается так, оно равно или превышает осевое усилие Fmin для ограничения проскальзывания, вычисленное вышеупомянутым способом, возникает следующая проблема.
[0051] В частности, когда клиновидная цепь 13 растягивается, увеличивается радиус Rp оборачивания клиновидной цепи 13 вокруг первичного шкива 11. Как результат, осевое усилие Fmin для ограничения проскальзывания становится меньше.
[0052] В этом случае, если осевое усилие Fs шкива для вторичного шкива 12 задается посредством использования осевого усилия Fmin для ограничения проскальзывания, вычисленного без учета растяжения клиновидной цепи 13, осевое усилие Fs шкива становится чрезмерно большим. Как результат, возрастают потери в гидравлическом давлении или потери на трение, что приводит к повышению расхода топлива двигателя 1 внутреннего сгорания, который приводит в действие гидравлический насос 10.
[0053] В этом варианте осуществления осевое усилие Fmin для ограничения проскальзывания вычисляется с учетом растяжения клиновидной цепи 13. Когда клиновидная цепь 13 растягивается, увеличивается радиус Rp оборачивания клиновидной цепи 13 вокруг первичного шкива 11. Как можно понять из выражения (1), когда радиус Rp оборачивания увеличивается, осевое усилие Fmin для ограничения проскальзывания снижается. Снижение осевого усилия Fmin для ограничения проскальзывания понижает натяжение клиновидной цепи 13. Следовательно, величина растяжения клиновидной цепи 13 снижается. Когда клиновидная цепь 13 растягивается, как описано выше, осевое усилие Fmin для ограничения проскальзывания не может быть вычислено без вычисления сходимости.
[0054] Контроллер 22 трансмиссии выполняет вычисление сходимости осевого усилия Fmin для ограничения проскальзывания посредством логики вычисления, проиллюстрированной на фиг. 4.
[0055] Ссылаясь на фиг. 4, контроллер 22 трансмиссии содержит модуль B11 вычисления натяжения цепи, модуль B12 вычисления длины цепи, модуль B13 вычисления радиуса оборачивания первичного шкива и модуль B14 вычисления осевого усилия для ограничения проскальзывания. Все блоки, показанные на фиг. 4, являются виртуальными модулями, иллюстрирующими функцию контроллера 22 трансмиссии для вычисления осевого усилия Fmin для ограничения проскальзывания, и не существуют в качестве физических объектов.
[0056] В модуль B11 вычисления натяжения цепи вводятся входной крутящий момент Tp в первичный шкив 11, фактическое передаточное число ip, частота Np вращения первичного шкива 11 и осевое усилие Fmin для ограничения проскальзывания.
[0057] Здесь, входной крутящий момент Tp в первичном шкиве 11 вычисляется посредством известного способа, например, раскрытого в JP 08-200461 A и JP 2002-106705 A, на основе крутящего момента Teng двигателя, вводимого из модуля 51 управления двигателем (ECU), проиллюстрированного на фиг. 1, состояния блокировки преобразователя 2 крутящего момента и инерционного крутящего момента элементов передачи энергии из двигателя 1 внутреннего сгорания в первичный шкив 11.
[0058] Частота Np вращения первичного шкива 11 является значением, определенным посредством первичного датчика 42 вращения. Фактическое передаточное число ip вычисляется как отношение частоты Np вращения первичного шкива 11, которая определяется посредством первичного датчика 42 вращения, и частоты Ns вращения вторичного шкива 12, которая определяется посредством вторичного датчика 43 вращения.
[0059] Осевое усилие Fmin для ограничения проскальзывания является значением, вычисленным посредством модуля B14 вычисления осевого усилия для ограничения проскальзывания. Контроллер 22 трансмиссии снова выполняет вычисление сходимости посредством ввода осевого усилия Fmin для ограничения проскальзывания, вычисленного посредством модуля B14 вычисления осевого усилия для ограничения проскальзывания, в модуль B11 вычисления натяжения цепи.
[0060] Начальное значение осевого усилия Fmin для ограничения проскальзывания задается, например, следующим образом. В частности, радиус Rp0 оборачивания вокруг первичного шкива 11 вычисляется из длины L0 цепи без растяжения и передаточного числа первичного шкива 11 и вторичного шкива 12. Затем, осевое усилие для ограничения проскальзывания, вычисленное из радиуса Rp0 оборачивания и входного крутящего момента Tp в первичный шкив 11, используется в качестве начального значения осевого усилия Fmin для ограничения проскальзывания. Начальное значение осевого усилия Fmin для ограничения проскальзывания также может задаваться посредством другого способа.
[0061] Модуль B11 вычисления натяжения цепи вычисляет натяжение Tn цепи из входного крутящего момента Tp в первичный шкив 11, осевого усилия Fmin для ограничения проскальзывания, осевого усилия Fp шкива для первичного шкива 11, частоты Np вращения первичного шкива 11 и фактического передаточного числа ip.
[0062] Ссылаясь на фиг. 6, натяжение Tn цепи для клиновидной цепи 13 имеет характеристику плавного увеличения по мере того, как увеличивается входной крутящий момент Tp первичного шкива 11, когда фактическое передаточное число ip первичного шкива 11 и вторичного шкива 12, осевое усилие шкива для вторичного шкива 12 и частота Np вращения первичного шкива 11 являются постоянными. Осевое усилие Fs для вторичного шкива 12 и осевое усилие Fp для первичного шкива 11 имеют постоянную взаимосвязь на основе фактического передаточного числа ip.
[0063] Ссылаясь на фиг. 7, натяжение Tn цепи для клиновидной цепи 13 увеличивается по мере того, как увеличивается осевое усилие Fs шкива для вторичного шкива 12, когда входной крутящий момент Tp в первичный шкив 11, его частота Np вращения и фактическое передаточное число ip первичного шкива 11 и вторичного шкива 12 являются постоянными.
[0064] Ссылаясь на фиг. 8, натяжение Tn цепи для клиновидной цепи 13 увеличивается по мере того, как частота Np вращения первичного шкива 11 становится более высокой, когда входной крутящий момент Tp в первичный шкив 11, осевое усилие Fs шкива для вторичного шкива 12 и фактическое передаточное число ip являются постоянными.
[0065] Ссылаясь на фиг. 8, натяжение Tn цепи для клиновидной цепи 13 имеет тенденцию немного снижаться по мере того, как увеличивается фактическое передаточное число ip первичного шкива 11 и вторичного шкива 12, когда осевое усилие Fs шкива для вторичного шкива 12, входной крутящий момент в первичный шкив 11 и частота Np вращения первичного шкива 11 являются постоянными.
[0066] На основе характеристик, описанных выше, может быть создана четырехмерная карта натяжения Tn цепи, которая имеет входной крутящий момент Tp в первичный шкив 11, осевое усилие Fs шкива для вторичного шкива 12, фактическое передаточное число ip и частоту Np вращения первичного шкива 11 в качестве параметров, указывающих рабочий режим CVT 4. В ROM контроллера 22 трансмиссии заранее сохраняется такая созданная четырехмерная карта натяжения Tn цепи. Модуль B11 вычисления натяжения цепи получает натяжение Tn цепи на основе входных данных посредством обращения к четырехмерной карте натяжения Tn цепи, сохраненной в ROM.
[0067] Модуль B12 вычисления длины цепи получает величину растяжения цепи из натяжения Tn цепи и затем суммирует величину растяжения цепи с длиной цепи без растяжения, чтобы вычислять длину L цепи. Взаимосвязь между натяжением Tn цепи и величиной растяжения цепи определяется экспериментально заранее. Длина цепи без растяжения является известным значением.
[0068] Модуль B13 вычисления радиуса оборачивания первичного шкива вычисляет радиус Rp оборачивания клиновидной цепи 13 вокруг первичного шкива 11 (в дальнейшем называемый "радиусом Rp оборачивания первичного шкива") из длины L цепи, расстояния dis между валами шкивов и фактического передаточного числа ip. Расстояние dis между валами шкивов является фиксированным значением, указывающим расстояние между осью вращения первичного шкива 11 и осью вращения вторичного шкива 12. Модуль B13 вычисления радиуса оборачивания первичного шкива вычисляет радиус Rp оборачивания первичного шкива посредством геометрического вычисления. Альтернативно, карта радиуса Rp оборачивания первичного шкива, которая имеет длину L цепи и фактическое передаточное число ip в качестве параметров, заранее сохраняется в ROM контроллера 22 трансмиссии. Поиск выполняется через карту с использованием длины L цепи и целевого передаточного числа Dip для того, чтобы вычислять радиус Rp оборачивания первичного шкива.
[0069] Когда стопор 21A шкива предоставляется для первичного шкива 11, радиус Rp оборачивания первичного шкива в районе максимального передаточного числа не становится меньше минимального значения, соответствующего позиции стопора 21A шкива. Когда радиус Rp оборачивания первичного шкива, меньший минимального значения, вычисляется в ходе вычисления, модуль B13 вычисления радиуса оборачивания первичного шкива корректирует радиус Rp оборачивания первичного шкива до минимального значения.
[0070] Предпочтительно, чтобы модуль B13 вычисления радиуса оборачивания первичного шкива не допускал того, чтобы радиус Rp оборачивания вокруг первичного шкива 11 становился меньше минимального значения с точки зрения недопущения вычисления чрезмерно большого значения осевого усилия Fmin для ограничения проскальзывания.
[0071] Кроме того, когда стопор 21B шкива предоставляется для первичного шкива 11, радиус Rp оборачивания вокруг первичного шкива 11 в районе минимального передаточного числа не становится больше максимального значения, соответствующего позиции стопора 21B шкива. Когда радиус Rp оборачивания вокруг первичного шкива 11, превышающий максимальное значение, вычисляется в ходе вычисления, модуль B13 вычисления радиуса оборачивания первичного шкива корректирует радиус Rp оборачивания вокруг первичного шкива 11 до максимального значения.
[0072] Предпочтительно, чтобы модуль B13 вычисления радиуса оборачивания первичного шкива ограничивал радиус Rp оборачивания первичного шкива максимальным значением или меньше с точки зрения предотвращения вычисления чрезмерно малого значения осевого усилия Fmin для ограничения проскальзывания.
[0073] Ограничение радиуса Rp оборачивания вокруг первичного шкива 11 минимальным значением и максимальным значением также может быть реализовано посредством предварительного ограничения значения карты для карты радиуса Rp оборачивания первичного шкива.
[0074] Модуль B14 вычисления осевого усилия для ограничения проскальзывания вычисляет осевое усилие Fmin для ограничения проскальзывания посредством использования выражения (1) на основе входного крутящего момента Tp в первичный шкив 11, радиуса Rp оборачивания первичного шкива, вычисленного посредством модуля B13 вычисления радиуса оборачивания первичного шкива, и коэффициента µ трения и угла α установки направляющего ролика, которые являются фиксированными значениями.
[0075] Осевое усилие Fmin для ограничения проскальзывания, вычисленное посредством модуля B14 вычисления осевого усилия для ограничения проскальзывания, снова вводится в модуль B11 вычисления натяжения цепи так, что натяжение Tn цепи повторно вычисляется. Дополнительно, длина L цепи, радиус Rp оборачивания первичного шкива и осевое усилие Fmin для ограничения проскальзывания, соответственно, повторно вычисляются в модуле B12 вычисления длины цепи, модуле B13 вычисления радиуса оборачивания первичного шкива и модуле B14 вычисления осевого усилия для ограничения проскальзывания.
[0076] Контроллер 22 трансмиссии повторяет обработку этапов B11-B14, чтобы выполнять вычисление сходимости. В результате вычисления сходимости получается осевое усилие Fmin для ограничения проскальзывания, соответствующее фактическому передаточному числу ip.
[0077] Из выражения (1) следует понимать, что осевое усилие Fmin для ограничения проскальзывания становится меньше по мере того, как радиус Rp оборачивания первичного шкива становится больше, и что радиус Rp оборачивания первичного шкива становится больше по мере того, как осевое усилие Fmin для ограничения проскальзывания становится меньше.
[0078] Ссылаясь на фиг. 5A и 5B, в процессе сходимости при вычислении сходимости, описанном выше, осевое усилие Fmin для ограничения проскальзывания и радиус Rp оборачивания первичного шкива сходятся при том, что одно из них увеличивается, а другое снижается.
[0079] Когда подвижный направляющий ролик 11B первичного шкива 11 примыкает к стопору 21B шкива, предпочтительно с точки зрения уменьшения вычислительной нагрузки фиксировать осевое усилие Fmin для ограничения проскальзывания равным значению в момент, когда первичный шкив 11 примыкает к стопору 21B шкива при условии, что поддерживается состояние примыкания. Аналогично, когда подвижный направляющий ролик 11B первичного шкива 11 примыкает к стопору 21A шкива, предпочтительно с точки зрения уменьшения вычислительной нагрузки фиксировать осевое усилие Fmin для ограничения проскальзывания равным значению в момент, когда первичный шкив 11 примыкает к стопору 21A шкива при условии, что поддерживается состояние примыкания.
[0080] Снова ссылаясь на фиг. 3, на этапе S4 контроллер 22 трансмиссии накладывает ограничение с помощью осевого усилия Fmin для ограничения проскальзывания на осевое усилие Fp шкива для первичного шкива 11 и осевое усилие Fs шкива для вторичного шкива 12, которые вычисляются на этапе S2. Дополнительно, гидравлические давления, которые должны подаваться в гидравлические цилиндры 15 и 16, которые соответствуют ограниченному значению, инструктируются в схему 21 гидравлического управления.
[0081] Ссылаясь на фиг. 10A-10D, конкретно описываются действия, осуществляемые посредством устройства управления передаточным числом, описанного выше. Рассмотрим случай, в котором входной крутящий момент Tp в первичный шкив 11 CVT 4 увеличивается во время t1, как проиллюстрировано на фиг. 10A, и частота Np вращения первичного шкива 11 увеличивается во время t2, как проиллюстрировано на фиг. 10B, в состоянии, в котором фактическое передаточное число ip поддерживается в районе минимального передаточного числа.
[0082] Когда входной крутящий момент Tp в первичный шкив 11 увеличивается во время t1, осевое усилие Fmin для ограничения проскальзывания, вычисленное посредством выражения (1), увеличивается, как указано посредством сплошной линии на фиг. 10D. Когда входной крутящий момент Tp в первичный шкив 11 увеличивается, натяжение Tn цепи для клиновидной цепи 13 также увеличивается, как проиллюстрировано на фиг. 6. Увеличение натяжения Tn цепи увеличивает длину L цепи, как проиллюстрировано на фиг. 10C. С увеличением длины L цепи также увеличивается радиус Rp оборачивания первичного шкива. Увеличение радиуса Rp оборачивания первичного шкива приводит к снижению осевого усилия Fmin для ограничения проскальзывания, как выражается посредством выражения (1).
[0083] Когда не учитывается растяжение клиновидной цепи 13, осевое усилие Fmin для ограничения проскальзывания поддерживает постоянное значение, как указано посредством сплошной линии на фиг. 10D.
[0084] Дополнительно, когда частота Np вращения первичного шкива 11 увеличивается во время t2, натяжение Tn цепи для клиновидной цепи 13 также увеличивается, как проиллюстрировано на фиг. 8. Увеличение натяжения Tn цепи дополнительно увеличивает длину L цепи, как проиллюстрировано на фиг. 10C. Дополнительное увеличение длины L цепи дополнительно увеличивает радиус Rp оборачивания первичного шкива. Дополнительное увеличение радиуса Rp оборачивания первичного шкива приводит к дополнительному снижению осевого усилия Fmin для ограничения проскальзывания, как выражается посредством выражения (1).
[0085] С другой стороны, когда не учитывается растяжение клиновидной цепи 13, осевое усилие Fmin для ограничения проскальзывания поддерживает постоянное значение также после времени t2, как указано посредством сплошной линии на фиг. 10D.
[0086] Осевое усилие Fs шкива для вторичного шкива 12 задается равным осевому усилию Fmin для ограничения проскальзывания. На основе осевого усилия шкива вычисляется осевое усилие Fp первичного шкива 11. После времени t1 осевое усилие Fmin для ограничения проскальзывания, вычисленное с учетом растяжения клиновидной цепи 13, меньше осевого усилия Fmin для ограничения проскальзывания, вычисленного без учета растяжения клиновидной цепи. Следовательно, осевое усилие Fs вторичного шкива, определенное на основе осевого усилия Fmin для ограничения проскальзывания, является значением с учетом растяжения клиновидной цепи 13 и уменьшается таким образом, что оно меньше осевого усилия Fs вторичного шкива в случае, если не учитывается растяжение клиновидной цепи 13.
[0087] Следовательно, гидравлическое давление, поданное в гидравлический цилиндр 16, который прикладывает осевое усилие шкива к вторичному шкиву 12, может быть уменьшено. Первичное осевое усилие Fp, вычисленное на основе вторичного осевого усилия Fs, также уменьшается таким образом, что оно меньше первичного осевого усилия Fp в случае, если не учитывается растяжение клиновидной цепи 13. Следовательно, гидравлическое давление, поданное в гидравлический цилиндр 15, который прикладывает осевое усилие шкива к первичному шкиву 11, также может быть уменьшено. Как результат, потери в гидравлическом давлении или потери на трение, вызываемые посредством подачи гидравлических давлений, становятся небольшими. Таким образом, может быть уменьшен расход топлива двигателя 1 внутреннего сгорания, который приводит в действие гидравлический насос 10.
[0088] На фиг. 10A-10D, для удобства описания, входной крутящий момент Tp в первичный шкив 11 и частота Np вращения первичного шкива 11 проиллюстрированы как увеличивающиеся пошагово. Тем не менее, на практике вышеуказанные значения не увеличиваются мгновенно, а увеличиваются в пределах определенного временного интервала.
[0089] В варианте осуществления, описанном выше, длина L цепи вычисляется из параметров, указывающих рабочий режим CVT 4, и радиус Rp оборачивания первичного шкива вычисляется из длины L цепи. Тем не менее, карта, которая задает взаимосвязь между параметрами, указывающими рабочий режим CVT 4, и радиусом Rp оборачивания первичного шкива может сохраняться в ROM контроллера 22 трансмиссии, так что радиус Rp оборачивания первичного шкива вычисляется непосредственно из параметров.
[0090] Как описано выше, когда длина L цепи увеличивается, радиус Rp оборачивания клиновидной цепи 13 вокруг первичного шкива 11 увеличивается, тогда как осевое усилие Fmin для ограничения проскальзывания снижается. Следовательно, как проиллюстрировано на фиг. 4, контроллер 22 трансмиссии выполняет вычисление сходимости посредством итеративного прохождения через процесс вычисления длины L цепи снова посредством использования сниженного осевого усилия Fmin для ограничения проскальзывания и дополнительного вычисления осевого усилия Fmin для ограничения проскальзывания на основе новой длины L цепи.
[0091] Чтобы уменьшать вычислительную нагрузку контроллера 22 трансмиссии посредством вычисления сходимости, радиус R' оборачивания первичного шкива может быть вычислен заранее для комбинации входного крутящего момента Tp в первичный шкив 11, фактического передаточного числа ip и частоты Np вращения первичного шкива 11 посредством итеративного вычисления, проиллюстрированного на фиг. 4, так что результат вычисления сохраняется в качестве карты в ROM контроллера 22 трансмиссии.
[0092] Ссылаясь на фиг. 12, посредством предварительного создания карты, описанной выше, модуль B11 вычисления натяжения цепи, модуль B12 вычисления длины цепи и модуль B13 вычисления радиуса оборачивания первичного шкива контроллера 22 трансмиссии, проиллюстрированные на фиг. 4, могут быть заменены посредством одного модуля B21 вычисления радиуса оборачивания первичного шкива, как проиллюстрировано на фиг. 12. Модуль B14 вычисления осевого усилия для ограничения проскальзывания использует радиус R' оборачивания первичного шкива и входной крутящий момент Tp в первичный шкив 11, найденные из карты, как и в случае по фиг. 4, для того чтобы вычислять осевое усилие Fmin для ограничения проскальзывания.
[0093] Посредством создания карты радиуса R' оборачивания первичного шкива, описанной выше, может опускаться вычисление сходимости. Следовательно, может быть уменьшена вычислительная нагрузка контроллера 22 трансмиссии.
[0094] В этом варианте осуществления описан случай, в котором стопоры 21A и 21B шкивов предоставляются для первичного шкива 11, тогда как для вторичного шкива 12 стопор шкива не предоставляется. Тем не менее, даже в случае, если стопоры 21A и 21B шкивов предоставляются для вторичного шкива 12, тогда как для первичного шкива 11 стопор шкива не предоставляется, предпочтительные результаты могут быть получены посредством применения этого изобретения. В частности, в этом случае, осевое усилие Fs шкива для вторичного шкива 12 обеспечивается в районе минимального передаточного числа, тогда как существует риск того, что осевое усилие шкива для первичного шкива 11 становится меньше осевого усилия Fmin для ограничения проскальзывания в районе максимального передаточного числа. В этом случае, контроллер 22 трансмиссии ограничивает осевое усилие Fp шкива для первичного шкива 11 с помощью осевого усилия Fmin для ограничения проскальзывания. Тем не менее, когда клиновидная цепь 13 растягивается, радиус Rp оборачивания вокруг первичного шкива 11 увеличивается. Как результат, осевое усилие Fmin для ограничения проскальзывания снижается. Тем не менее, посредством точного вычисления осевого усилия Fmin для ограничения проскальзывания, которое снижается в соответствии с растяжением клиновидной цепи 13 посредством контроллера 22 трансмиссии, можно не допускать чрезмерно больших осевых усилий шкивов при том, что возникновение значительного проскальзывания клиновидной цепи 13 не допускается даже в этом случае.
[0095] Содержимое Tokugan 2011-138499, с датой подачи от 15 февраля 2011 года в Японии, тем самым содержится в данном документе по ссылке.
[0096] Хотя изобретение описано выше в отношении конкретного варианта осуществления, изобретение не ограничено вариантом осуществления, описанным выше. Модификации и варьирования варианта осуществления, описанного выше, должны быть очевидными для специалистов в данной области техники в пределах объема формулы изобретения.
Область промышленного применения
[0097] Посредством применения устройства управления и способа управления передаточным числом для бесступенчатой трансмиссии согласно этому изобретению к приводной системе транспортного средства, может выполняться точное управление передаточным числом без влияния посредством того, растягивается или нет бесконечный элемент передачи крутящего момента. Следовательно, получаются преимущества для улучшения рабочих характеристик приведения в движение транспортного средства.
[0098] Варианты осуществления данного изобретения, в которых заявляется исключительное право собственности или право использования, задаются следующим образом.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО И СПОСОБ ДЛЯ УПРАВЛЕНИЯ РЕМЕННОЙ БЕСCТУПЕНЧАТО РЕГУЛИРУЕМОЙ ТРАНСМИССИЕЙ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2503864C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ УПРАВЛЕНИЯ РЕМЕННОЙ БЕССТУПЕНЧАТО РЕГУЛИРУЕМОЙ ТРАНСМИССИЕЙ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2505727C1 |
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ БЕССТУПЕНЧАТОЙ ТРАНСМИССИЕЙ РЕМЕННОГО ТИПА | 2009 |
|
RU2490533C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ И СПОСОБ УПРАВЛЕНИЯ РЕМЕННОЙ БЕССТУПЕНЧАТОЙ ТРАНСМИССИЕЙ | 2009 |
|
RU2483235C1 |
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ БЕССТУПЕНЧАТОЙ ТРАНСМИССИЕЙ РЕМЕННОГО ТИПА | 2009 |
|
RU2483234C1 |
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ БЕССТУПЕНЧАТОЙ ТРАНСМИССИЕЙ РЕМЕННОГО ТИПА | 2009 |
|
RU2498132C2 |
| СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2646780C2 |
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ БЕССТУПЕНЧАТОЙ ТРАНСМИССИЕЙ РЕМЕННОГО ТИПА | 2009 |
|
RU2485372C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЕМПФИРОВАНИЕМ ДЛЯ ЭЛЕКТРИЧЕСКОГО ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2657624C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ГИБРИДНЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ И СПОСОБ УПРАВЛЕНИЯ ГИБРИДНЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2014 |
|
RU2643019C1 |

Изобретение относится к управлению осевым усилием шкива вариатора. Устройство управления передаточным числом для бесступенчатой трансмиссии c бесконечным элементом передачи крутящего момента, обмотанным вокруг пары шкивов, содержит датчик определения рабочего режима бесступенчатой трансмиссии и программируемый контроллер, который вычисляет величину растяжения бесконечного элемента на основе рабочего режима бесступенчатой трансмиссии и осевого усилия для ограничения проскальзывания в соответствии с величиной растяжения. Также контроллер управляет осевым усилием шкива для одного из шкивов, для ограничения проскальзывания. Изобретение также относится к способу управления передаточным числом, согласно вышеуказанному устройству. Достигается надлежащее управление осевым усилием шкива при растяжении бесконечного элемента. 2 н. и 4 з.п. ф-лы, 12 ил.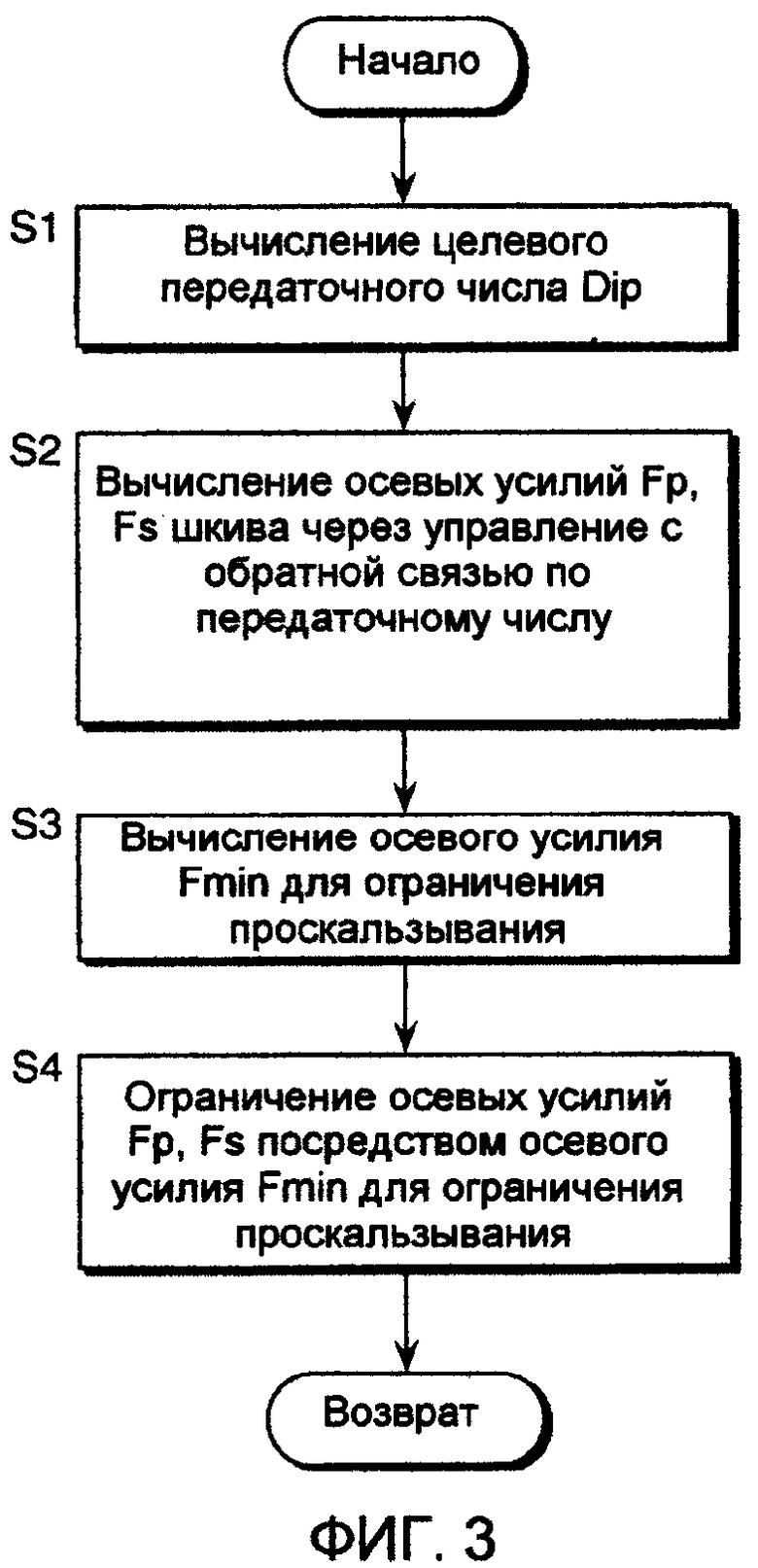
1. Устройство управления передаточным числом для бесступенчатой трансмиссии (4), при этом бесступенчатая трансмиссия (4) содержит бесконечный элемент (13) передачи крутящего момента, обмотанный вокруг пары шкивов (11, 12), причем один из шкивов (11, 12) имеет подвижный направляющий ролик (11A, 11B), выполненный с возможностью смещаться в осевом направлении в соответствии с прикладываемым осевым усилием шкива, чтобы изменять радиус оборачивания бесконечного элемента (13) передачи крутящего момента, при этом устройство управления передаточным числом содержит:
- датчик (21, 42, 43), который определяет рабочий режим бесступенчатой трансмиссии (4); и
- программируемый контроллер (22), запрограммированный с возможностью:
- вычислять величину растяжения бесконечного элемента (13) передачи крутящего момента на основе рабочего режима бесступенчатой трансмиссии (4) и осевое усилие для ограничения проскальзывания в соответствии с величиной растяжения (S3); и
- управлять осевым усилием шкива для одного из шкивов (11, 12) на основе осевого усилия для ограничения проскальзывания (S4).
2. Устройство управления передаточным числом по п. 1, в котором контроллер (22) дополнительно запрограммирован с возможностью вычислять (B14) осевое усилие для ограничения проскальзывания так, что осевое усилие для ограничения проскальзывания снижается по мере того, как увеличивается величина растяжения.
3. Устройство управления передаточным числом по п. 1, в котором:
- пара шкивов (11, 12) включает в себя первичный шкив (11) для ввода крутящего момента снаружи и вторичный шкив (12) для вывода крутящего момента наружу; и
- рабочий режим включает в себя, по меньшей мере, одно из входного крутящего момента в первичный шкив (11), осевого усилия шкива, прикладываемого к вторичному шкиву (12), частоты вращения первичного шкива (11) и фактического передаточного числа первичного шкива (11) относительно вторичного шкива (12).
4. Устройство управления передаточным числом по п. 3, в котором контроллер (22) дополнительно запрограммирован с возможностью выполнять вычисление сходимости для осевого усилия для ограничения проскальзывания посредством повторения процесса вычисления (B12) длины бесконечного элемента (13) передачи крутящего момента, включающей в себя величину растяжения, вычисления (B14) осевого усилия для ограничения проскальзывания из длины бесконечного элемента (13) передачи крутящего момента, повторного вычисления (B12) длины бесконечного элемента (13) передачи крутящего момента посредством использования осевого усилия для ограничения проскальзывания и повторного вычисления (B14) осевого усилия для ограничения проскальзывания снова из повторно вычисленной длины бесконечного элемента (13) передачи крутящего момента.
5. Устройство управления передаточным числом по любому из пп. 2-4, в котором:
- каждый из пары шкивов (11, 12) содержит подвижный направляющий ролик (11B, 12B), выполненный с возможностью смещаться в осевом направлении в соответствии с прикладываемым осевым усилием шкива;
- один из шкивов (11, 12) содержит стопор (21B), который ограничивает осевое смещение подвижного направляющего ролика (11B, 12B) за пределы предварительно определенного ограничения относительно прикладываемого осевого усилия шкива; и
- контроллер (22) дополнительно запрограммирован с возможностью задавать (B13) осевое усилие для ограничения проскальзывания, вычисленное, когда смещение подвижного направляющего ролика (11B, 12B) ограничивается посредством стопора (21B) таким образом, что оно равно осевому усилию для ограничения проскальзывания, полученному во время, когда подвижный направляющий ролик (11B, 12B) смещается так, что он достигает стопора (21B).
6. Способ управления передаточным числом для бесступенчатой трансмиссии (4), при этом бесступенчатая трансмиссия (4) содержит бесконечный элемент (13) передачи крутящего момента, обмотанный вокруг пары шкивов (11, 12), причем один из шкивов (11, 12) имеет подвижный направляющий ролик (11A, 11B), выполненный с возможностью смещаться в осевом направлении в соответствии с прикладываемым осевым усилием шкива, чтобы изменять радиус оборачивания бесконечного элемента (13) передачи крутящего момента, при этом способ управления передаточным числом содержит этапы, на которых:
- определяют рабочий режим бесступенчатой трансмиссии;
- вычисляют величину растяжения бесконечного элемента (13) передачи крутящего момента на основе рабочего режима бесступенчатой трансмиссии (4) и осевое усилие для ограничения проскальзывания в соответствии с величиной растяжения (S3); и
- управляют осевым усилием шкива для одного из шкивов (11, 12) на основе осевого усилия для ограничения проскальзывания (S4).
| JP 2006189079 A, 20.07.2006 | |||
| JP 2004076906 A, 11.03.2004 | |||
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |

