Изобретение относится к области автоматики и предназначено для использования в системах управления испытательных машин с электрогидравлическим следящим приводом.
Устройства передачи управления в системах управления технологическими процессами достаточно известны и широко применяются на практике. Основное требование к таким устройствам заключается в том, чтобы они обеспечивали переход с одного параметра управления на другой безударно, т.е. чтобы в момент передачи управления параметры испытания оставались неизменными.
Известны устройства, реализующие безударный переход с внешнего задания на внутреннее и плавное отступление к последнему значению внешнего задания (Ялышев А.У., Разоренов О.И. Многофункциональные аналоговые регулирующие устройства автоматики. Изд. Машиностроение, 1981, УДК 62.551.4, стр.69-74) [1].
Недостатком подобных устройств является выполнение передачи управления с одного задающего устройства на другое, что, в принципе, не гарантирует безударный переход с одного параметра управления на другой.
Технология проведения испытаний материалов и изделий предъявляет более жесткие требования к системам управления испытательными машинами. При проведении испытаний образцов материалов на статическую прочность необходимо в процессе испытаний осуществлять переход с одного параметра управления на другой, в том числе с деформации образца на перемещение плунжера гидроцилиндра при записи диаграммы растяжения образца в случаях, когда деформация образца приближается к пределу измерения используемого датчика деформации, но образец еще не разрушился, или на нагрузку, приложенную в данный момент к испытываемому образцу. При выполнении перехода с одного параметра управления на другой нагрузка на испытываемом образце не должна изменяться. Аналогичная задача возникает и при испытаниях некоторых ответственных конструкций таких, как гидроамортизаторы атомных электростанций, где несоответствие нагрузки, существующей в момент перехода с одного параметра управления на другой, может привести к разрушению дорогостоящего изделия.
Различные варианты решения данной проблемы также приведены в: (Патент ФРГ №2213436, кл. 42 к 34/04, 1974) [2]; (Авторское свидетельство СССР №711541, G05B 19/38, 1978) [3]; (Авторское свидетельство СССР №1117591, G05B 19/18, 1984) [4].
Так, в устройстве (Авторское свидетельство СССР №1117591, G05B 19/18, 1984) [4] переход с одного параметра управления на другой реализуется при нулевом (или близком к нулевой величине) значении сигнала параметра, по которому осуществляется управление процессом испытаний.
Устройство имеет несколько каналов управления, как и в предлагаемом устройстве для передачи управления с одного параметра на другой, их количество определяется числом параметров, задействованных в технологии испытаний. При этом каждый из каналов работает в одном из двух режимов: режиме управления или режиме измерения при условии, что одновременно каналы не могут находиться в одинаковых режимах работы. Канал, по которому в данное время осуществляется управление процессом испытаний, работает следующим образом. Сигнал задания поступает на один из входов суммирующего усилителя, на другой вход которого подается сигнал обратной связи с датчика, по которому происходит управление процессом испытаний. Разностный сигнал, пропорциональный заданной величине параметра управления, воздействует на исполнительный орган, который приводит в работу объект управления, с помощью которого проводится испытание. Таким образом, в исходном состоянии канал управления работает как обычная система автоматического регулирования.
Другой канал в это время находится в режиме измерения и работает следующим образом. Разностный сигнал, образованный после суммирования сигналов задания и обратной связи с датчика, на который в процессе испытания необходимо осуществить переход, поступает в блок триггеров, где производится сравнение этого сигнала с двумя заранее заданными и близкими к нулю порогами срабатывания: одним положительным, другим отрицательным. Выходной сигнал блока триггеров управляет реверсивным счетчиком, устанавливая его в такое состояние, при котором сигнал задания уравнивается с сигналом датчика, по которому при переходе будет осуществляться управление процессом испытаний. В результате этого система управления переходит в равновесное состояние и на выходе суммирующего усилителя устанавливается сигнал величиной, близкой к нулю, и находящийся между заданными порогами.
В момент подачи команды на переход с одного параметра управления на другой специальным устройством формируется сигнал обратной связи в канале управления величиной, равной сигналу задания, в результате чего воздействие на исполнительный орган прекращается, так как разностный сигнал на выходе суммирующего усилителя этого канала становится равным нулю или близким к нулевому значению. В это время коммутатор подключает выход суммирующего усилителя канала измерения к входу исполнительного органа, осуществляя тем самым изменение вида обратной связи, вследствие чего канал управления и канал измерения меняются местами: канал измерения переходит в режим управления, а канал управления - в режим измерения.
Основным недостатком аналога является предположение о равенстве нулю разностного сигнала на выходе суммирующего усилителя канала управления в момент перехода, что на практике не всегда соответствует действительности, так как система управления имеет ошибку статизма (из-за конечности коэффициента усиления суммирующего усилителя - не бесконечно большого его значения), а также потому, что на выходе суммирующего усилителя может присутствовать напряжение смещения, флуктуирующее в зависимости от температуры и времени. Кроме того, свое влияние оказывает исполнительный орган (в рассматриваемом случае это электрогидравлический усилитель), у которого с прогревом рабочей жидкости (индустриальное масло) положение управляющего золотника изменяется, то же самое происходит при изменении давления рабочей жидкости в объекте управления (в рассматриваемом случае это гидравлический силовой цилиндр), что приводит к изменению нагрузки на испытываемом образце. Нагрузка на испытываемом образце также изменяется за счет возрастания утечек рабочей жидкости между гидроцилиндром и его плунжером при разогреве рабочей жидкости в процессе работы испытательной машины. В связи с перечисленными возможными факторами переход с одного параметра управления на другой может сопровождаться существенной погрешностью, температурной и временной нестабильностью, что в итоге приводит к наличию сигнала на выходе суммирующего усилителя канала управления в момент перехода и соответственно к удару на испытываемый образец или конструкцию в связи с подачей на исполнительный орган не нулевого сигнала.
Наиболее близким по технической сущности к заявляемому устройству является «Устройство безударного перехода с одного параметра управления на другой» (Патент на изобретение №2223527, G05B 7/02, 19/18, 2004) [5], в котором передача управления с одного параметра управления на другой реализуется путем замещения действующего сигнала управления сигналом другого канала, равного по величине действующему. В данном устройстве, взятом в качестве прототипа, переход с одного параметра управления на другой, например с деформации образца на перемещение плунжера гидроцилиндра, с помощью которого упомянутый образец деформируется, обеспечивается специальным устройством, имеющим два канала, первый из которых является активным и формирует сигнал управления по деформации, а второй - пассивным, в задачу которого входит «подтягивание» разностного сигнала обратной связи по перемещению до величины первого. В момент равенства разностных сигналов обоих каналов второй канал становится активным, а первый пассивным.
Прототип имеет два канала, каждый из которых содержит по одному цифроаналоговому преобразователю, суммирующему усилителю, коммутатору и компаратору, а также исполнительный орган (электрогидравлический усилитель), с помощью которого управляется объект управления (силовой гидроцилиндр) и датчики обратных связей. Сигнал задания на цифроаналоговые преобразователи поступает от внешнего цифрового устройства и после преобразования в аналоговый вид суммируется на входе усилителей с сигналами обратных связей, например, в одном из каналов с сигналом датчика деформации, в другом - с сигналом датчика перемещения плунжера гидроцилиндра. Коммутаторы служат для переключения сигналов датчиков обратных связей и подключения их к входам компараторов, которые осуществляют сравнение действующего в данный момент сигнала управления, поступающего на исполнительный орган с одного из каналов, и замещающего сигнала управления с другого канала, готовящегося «взять» управление на себя. При этом первый канал своим коммутатором подключен к исполнительному органу, а второй канал своим коммутатором переведен в ждущий режим.
В процессе подготовки перехода с одного параметра управления на другой с внешнего управляющего устройства через «шину данных» в цифроаналоговый преобразователь канала, находящегося в ждущем режиме, записываются цифровые данные, например, способом их последовательного перебора. В процессе этого перебора аналоговый сигнал на входе суммирующего усилителя второго канала суммируется с сигналом датчика перемещения плунжера гидроцилиндра, и результирующий сигнал поступает на один из входов компаратора этого же канала, на другой вход которого подается сигнал управления первого канала, управляющего в данный момент исполнительным органом (сигнал датчика деформации). При достижении равенства этих сигналов компаратором этого канала формируется сигнал «разрешение перехода на 2-й канал», который воспринимается внешним управляющим устройством. Внешнее управляющее устройство в ответ выдает сигнал «передача управления», который переводит коммутаторы первого и второго каналов в противоположное состояние, в результате чего контактами коммутатора второго канала последний подключается к исполнительному органу с одновременным отключением от него управляющего сигнала первого канала. Теперь второй канал становится активным, по нему ведется управление процессом испытания, а первый канал - пассивным, находящимся в ждущем режиме.
Основным недостатком прототипа является температурная и временная нестабильность коэффициентов передачи и напряжений смещения компараторов первого и второго каналов, которые в момент передачи управления могут иметь различные значения, в связи с чем выходные сигналы компараторов могут отличаться друг от друга по величине, что приведет к удару на испытываемый образец или конструкцию.
Предлагаемое устройство существенно снижает негативные последствия этого недостатка.
Цель изобретения заключается в повышении точности перехода с одного параметра управления на другой.
Поставленная цель достигается тем, что в устройстве передачи управления, содержащем два канала управления с цифроаналоговыми преобразователями и датчиками обратных связей, выходы которых подключены к входам суммирующих усилителей, выходами соединенных с входами коммутаторов, и один на два канала компаратор, выход суммирующего усилителя одного канала управления коммутатором своего канала соединен с входами исполнительного органа и компаратора, другой вход компаратора коммутатором другого канала управления подключен к выходу суммирующего усилителя этого канала управления, при этом переключение каналов управления осуществляют коммутаторы обоих каналов путем замыкания своих нормально разомкнутых контактов.
Устройство передачи управления представлено на структурной схеме, показанной на чертеже.
Устройство содержит цифроаналоговые преобразователи 1 и 2, суммирующие усилители 3 и 4, коммутаторы 5 и 6, компаратор 7, исполнительный орган 8, объект управления 9 и датчики обратных связей 10 и 11.
Цифроаналоговые преобразователи 1 и 2 осуществляют преобразование цифровых данных, поступающих от внешнего управляющего устройства, в аналоговые сигналы и могут быть выполнены как на дискретных элементах, так и на интегральных микросхемах КР 572 ПА2, МАХ 507 и др.
Суммирующие усилители 3 и 4 предназначены для суммирования аналоговых сигналов цифроаналоговых преобразователей 1 и 2 с сигналами датчиков обратных связей 10 и 11 соответственно и могут быть выполнены на операционных усилителях общепромышленного применения, например серии КР 140.
Коммутаторы 5 и 6 служат для переключения управляющих сигналов с выходов суммирующих усилителей. Их особенностью является наличие в их структуре замыкающего и размыкающего контактов. Для этой цели могут быть использованы коммутаторы КР 590КН4.
Компаратор 7 предназначен для сравнения действующего в данный момент сигнала управления, поступающего на исполнительный орган с одного канала, и замещающего сигнала управления другого канала, готовящегося «взять» управление на себя. В момент их равенства компаратор 7 формирует сигнал, разрешающий переход на другой параметр управления.
Исполнительный орган 8 представляет собой электрогидравлический усилитель (в литературе его еще называют сервоклапаном и сервогидравлическим усилителем), обеспечивающий подачу рабочей жидкости в полости силового гидроцилиндра - объекта управления 9.
Испытательная машина в своем составе имеет различные датчики, но для упрощения понимания сути процесса в структурную схему включены только два из них: датчик нагрузки 10 и датчик деформации 11.
Работа предлагаемого устройства заключается в следующем.
Цифровой код от внешнего управляющего устройства, которое не отображено на схеме, представляющий собой сигнал задания, форма которого определяется методикой испытания, через «шину данных» записывается в цифроаналоговый преобразователь 1 и после преобразования в аналоговый вид поступает на один из входов суммирующего усилителя 3. Сигнал обратной связи с выхода датчика нагрузки 10 поступает на другой вход суммирующего усилителя 3. Разностный сигнал (сигнал ошибки регулирования) через замкнутые контакты «а» коммутатора 5 поступает на вход исполнительного органа 8, который производит перераспределение рабочей жидкости между полостями силового гидроцилиндра (объекта управления 9) таким образом, что на испытываемом образце создается нагрузка, измеряемая датчиком нагрузки 10. Сигнал с датчика нагрузки 10 уравнивает сигнал задания с цифроаналогового преобразователя 1, в результате чего система управления переходит в равновесное состояние, постоянно отслеживая изменение сигнала задания. В это время работа системы управления испытательной машины по «каналу А» ничем не отличается от работы типичной системы автоматического регулирования.
Отличие возникает при передаче управления другому параметру управления.
Идея безударной передачи управления с одного параметра на другой заключается в подмене действующего в данный момент сигнала управления, поступающего на вход электрогидравлического усилителя, управляющего работой силового гидроцилиндра, другим, равным ему по величине сигналом управления другого канала управления.
Цифроаналоговый преобразователь 2, суммирующий усилитель 4, коммутатор 6 и датчик деформации образца 11 представляют собой второй канал управления, который предназначен для управления процессом испытания по деформации образца. Но поскольку выход суммирующего усилителя 4 отключен от исполнительного органа 8, контур управления по деформации разомкнут и «канал Б» не принимает участия в процессе регулирования и находится в ждущем режиме.
Связующим звеном между «каналом А» и «каналом Б» является компаратор 7. Он производит сравнение сигнала, поступающего на исполнительный орган 8, с сигналом, который заменит его после выполнения процесса выравнивания, т.е. после того, как он достигнет величины воздействующего в данный момент сигнала на исполнительный орган 8.
Процесс уравнивания сигналов «канала А» и «канала Б» производится следующим образом.
Как упоминалось выше, «канал А» находится в замкнутом состоянии и выполняет функцию регулирования, а «канал Б» разомкнут и находится в ждущем режиме.
Во время подготовки перехода с одного параметра управления на другой в цифроаналоговый преобразователь 2 внешним управляющим устройством через «шину данных» по определенному алгоритму записываются цифровые данные, в простейшем случае способом последовательного перебора данных. В процессе этого перебора аналоговый сигнал с цифроаналогового преобразователя 2 суммируется усилителем 4 с сигналом датчика деформации 11 и результирующий сигнал поступает на один из входов компаратора 7, на другой вход которого подается сигнал управления исполнительным органом 8. По достижению равенства этих сигналов компаратор 7 формирует сигнал «разрешение перехода», который воспринимается внешним управляющим устройством. В ответ внешнее управляющее устройство выдает сигнал «передача управления», который переводит коммутаторы 5 и 6 в противоположное состояние, т.е. размыкает их контакты «а» и замыкает контакты «б». Таким образом, исполнительный орган 8 отключается от выхода суммирующего усилителя 3 «канала А» и подключается к выходу суммирующего усилителя 4 «канала Б». Именно в этот момент и происходит подмена действовавшего до передачи управления сигнала управления, поступавшего на вход исполнительного органа, другим, равным ему по величине сигналом другого канала управления, и теперь «канал Б» становится управляющим, а «канал А» переводится в ждущий режим. Для исполнительного органа 8 и объекта управления 9 при этом ничего не изменилось, так как на входе исполнительного органа 8 остался сигнал той же величины и полярности, что и до переключения, в связи с чем воздействие на объект управления 9 осталось прежним, а следовательно, не изменились и выходные сигналы датчиков 10 и 11.
Теперь каналы управления поменялись местами: управление ведется по деформации образца, а канал управления по нагрузке перешел в ждущий режим.
Обратная передача управления осуществляется аналогично. В этом случае по достижению равенства сигналов на входе компаратора 7 последний сформирует сигнал «разрешение перехода», по которому внешнее управляющее устройство переведет коммутаторы 5 и 6 в исходное первоначальное состояние.
Предложенное устройство передачи управления с одного параметра на другой свободно от недостатка прототипа. Высокая точность передачи управления обеспечивается за счет того, что команда на передачу управления формируется одним и тем же компаратором, в связи с чем сравниваемые на нем сигналы всегда находятся в одинаковых условиях, поэтому температурная и временная нестабильность коэффициента передачи компаратора 7 в значительно меньшей степени влияет на точность передачи управления.
Заявляемое устройство прошло апробацию на испытательных машинах МИ-600 и МИ-5000, используемых для проверки технических характеристик гидроамортизаторов атомных электростанций, по технологии испытаний которых в процессе работы машины необходимо осуществлять передачу управления с перемещения плунжера силового гидроцилиндра на нагрузку, воздействующую на гидроамортизатор, и показало по сравнению с прототипом более высокие метрологические характеристики.
ИСПОЛЬЗОВАННЫЕ ИСТОЧНИКИ
1. Ялышев А.У., Разоренов О.И. Многофункциональные аналоговые регулирующие устройства автоматики. Изд. Машиностроение, 1981, УДК 62.551.4, стр.69-74.
2. Патент ФРГ №2213436, кл. 42 к 34/04, 1974.
3. Авторское свидетельство СССР №711541, G05B 19/38, 1978.
4. Авторское свидетельство СССР №1117591, G05B 19/18, 1984.
5. Патент на изобретение №2223527, G05B 7/02, 19/18, 2004.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО БЕЗУДАРНОГО ПЕРЕХОДА С ОДНОГО ПАРАМЕТРА УПРАВЛЕНИЯ НА ДРУГОЙ | 2002 |
|
RU2223527C2 |
| Устройство для программного управления | 1983 |
|
SU1117591A1 |
| СИСТЕМА УПРАВЛЕНИЯ МНОГОКАНАЛЬНЫМ ВИБРОСТЕНДОМ | 1998 |
|
RU2159949C2 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ МЕТАЛЛИЧЕСКИХ КОНСТРУКЦИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2339938C1 |
| Устройство для автоматической фокусировки излучения на носителе в системе записи-воспроизведения информации | 1989 |
|
SU1705861A1 |
| УСТРОЙСТВО БЕЗУДАРНОГО ПЕРЕХОДА С ОДНОГО ПАРАМЕТРА УПРАВЛЕНИЯ НА ДРУГОЙ | 2007 |
|
RU2372637C2 |
| УСТРОЙСТВО СБОРА, ПРЕОБРАЗОВАНИЯ И ПЕРЕДАЧИ РЕЗУЛЬТАТОВ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ФИЗИЧЕСКОЙ СРЕДЫ | 1994 |
|
RU2079882C1 |
| Устройство для управления многоканальным вибростендом | 1980 |
|
SU924665A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРИВОДАМИ АНТЕННОГО ПОСТА РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2015 |
|
RU2587715C1 |
| МНОГОКАНАЛЬНАЯ АКУСТИКО-ЭМИССИОННАЯ СИСТЕМА ДИАГНОСТИКИ КОНСТРУКЦИЙ | 2001 |
|
RU2217741C2 |
Изобретение относится к области автоматики и предназначено для использования в системах управления испытательных машин с электрогидравлическим следящим приводом. Техническим результатом является повышение точности перехода с одного параметра управления на другой. Устройство содержит: два канала управления с цифроаналоговыми преобразователями и датчиками обратных связей, выходы которых подключены к входам суммирующих усилителей, выходами соединенных с входами коммутаторов, и один на два канала компаратор, выход суммирующего усилителя одного канала управления коммутатором своего канала соединен с входами исполнительного органа и компаратора, другой вход компаратора коммутатором другого канала управления подключен к выходу суммирующего усилителя этого канала управления, при этом переключение каналов управления осуществляют коммутаторы обоих каналов путем замыкания своих нормально разомкнутых контактов. 1 ил.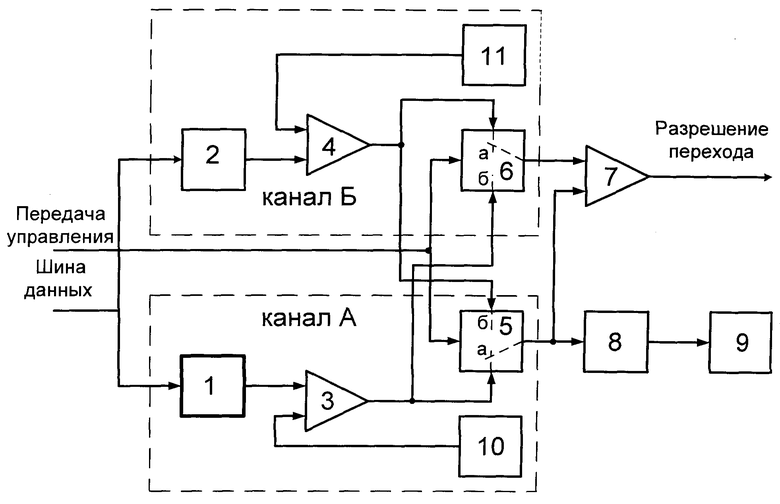
Устройство передачи управления, содержащее два канала управления с цифроаналоговыми преобразователями и датчиками обратных связей, выходы которых подключены к входам суммирующих усилителей, выходами соединенных с входами коммутаторов, и один на два канала компаратор, отличающееся тем, что выход суммирующего усилителя одного канала управления коммутатором своего канала соединен с входами исполнительного органа и компаратора, другой вход компаратора коммутатором другого канала управления подключен к выходу суммирующего усилителя этого канала управления, при этом переключение каналов управления осуществляют коммутаторы обоих каналов путем замыкания своих нормально разомкнутых контактов.
| УСТРОЙСТВО БЕЗУДАРНОГО ПЕРЕХОДА С ОДНОГО ПАРАМЕТРА УПРАВЛЕНИЯ НА ДРУГОЙ | 2007 |
|
RU2372637C2 |
| RU223527 C2, 10.02.2004 | |||
| Устройство для программного управления | 1983 |
|
SU1117591A1 |
| УСТРОЙСТВО ДЛЯ ОХЛАЖДЕНИЯ ЭЛЕМЕНТОВ РАДИОЭЛЕКТРОННОЙ АППАРАТУРЫ С ПОВТОРНО-КРАТКОВРЕМЕННЫМИ ТЕПЛОВЫДЕЛЕНИЯМИ | 2001 |
|
RU2213436C2 |
| US3940594, 24.02.1976 | |||

