Изобретение относится к автоматике и предназначено для использования в системах управления энергоустановками со следящим приводом регулирующего органа.
Известны устройства управления следящим приводом регулирующего органа в режимах дистанционного и автоматического управления с безударным переходом по значениям регулируемого параметра при изменении режима управления.
Схема такого устройства приводится, например, в источнике [Веллер В. Автоматизация судов. Л., «Судостроение», 1975, с.117-118]. Устройство содержит пропорциональный регулятор, входы которого связаны с выходами задатчика и датчика регулируемого параметра, а выход через коммутатор подключен ко входу следящего привода регулирующего органа. Недостатками этого устройства является то, что сигналы задания на режимах дистанционного и автоматического управления формируются здесь от различных задатчиков. Это снижает надежность устройства. Использование пропорционального регулятора не позволяет осуществлять регулирование с нулевой статической ошибкой. Кроме того, устройство не обеспечивает режима консервации при работе на режиме автоматического регулирования.
Наиболее близким по технической сущности к предлагаемому устройству является устройство безударного перехода с одного параметра управления на другой [Патент RU 2223527 С2. Опубл. 10.02.2004. Кл. G05B 7/02, G05B 19/18].
Устройство безударного перехода с одного параметра управления на другой содержит задатчик управляющего сигнала, коммутаторы и задатчик режима работы, выход которого связан с первыми входами коммутаторов, суммирующий усилитель, предназначенный для формирования разностного сигнала, первый вход которого связан с выходом датчика регулируемого параметра. Устройство обеспечивает безударный переход с одного параметра управления на другой при изменении этих параметров в результате перемещения регулирующего органа (РО), управляемого приводом регулирующего органа (ПРО). Переключение управления производят на основании контроля величины управляющих сигналов, формируемых в каналах управления этими параметрами и подключаемых ко входу ПРО. Передача управления от одного канала другому разрешается при условии равенства управляющих сигналов в работающем и подключаемом каналах.
Недостатком устройства является низкая точность осуществляемого им управления. Это вызвано тем, что формирование управляющих сигналов в устройстве производится с помощью суммирующих усилителей, предназначенных для формирования разностного сигнала. В результате на установившихся режимах работы значения регулируемых параметров поддерживаются со статической ошибкой по сравнению с их заданными значениями. Практика работ с системами управления, осуществляющими регулирование параметров энергоустановки подобным образом, показывает, что по условиям обеспечения устойчивой работы системы управления статическая ошибка может быть достаточно большой. В результате чего фактическое значение регулируемого параметра может отличаться от заданного значения на 5-20%.
Другим недостатком устройства является то, что оно использует два независимых задатчика значений параметров управления. Наличие двух органов задания управляющих сигналов вместо одного повышает возможность возникновения отказов в устройстве и приводит к низкой надежности его работы, поскольку задатчики управляющего сигнала являются наименее отказоустойчивыми из всех элементов, используемых в составе устройства.
Третьим недостатком устройства является то, что оно не обеспечивает режима консервации процесса регулирования. Такой режим заключается в фиксации по команде оператора текущего положения РО в процессе его перемещения под воздействием сигнала из регулятора. Подобная необходимость возникает при нерасчетных условиях эксплуатации энергоустановок. Консервация положения РО дает оператору время разобраться в обстановке и принять правильное решение об изменении сигнала задания или о переходе на режим управления по другому параметру.
Предлагаемое устройство свободно от указанных недостатков.
Задача изобретения - обеспечение возможности осуществления безударного перехода с одного параметра управления на другой на режимах дистанционного, автоматического управления энергоустановкой и режиме консервации процесса регулирования при повышении точности управления и надежности устройства.
Поставленная задача достигается тем, что в устройство безударного перехода с одного параметра управления на другой, содержащее задатчик управляющего сигнала, коммутаторы и задатчик режима работы, выход которого связан с первыми входами коммутаторов, суммирующий усилитель, предназначенный для формирования разностного сигнала, первый вход которого связан с выходом датчика регулируемого параметра, введены интегрирующий усилитель, блок памяти и суммирующий усилитель, предназначенный для формирования суммирующего сигнала, причем основной вход интегрирующего усилителя связан с выходом суммирующего усилителя, предназначенного для формирования разностного сигнала, подключенным также к первому входу суммирующего усилителя, предназначенного для формирования суммирующего сигнала, выход которого подключен ко второму входу второго коммутатора, вход задания начальных условий интегрирующего усилителя связан с выходом датчика положения привода регулирующего органа, подключенным также к основному входу блока памяти, управляющий вход которого связан с первым выходом третьего коммутатора, а выход подключен к третьему входу второго коммутатора, выход которого связан со входом привода регулирующего органа, управляющий вход интегрирующего усилителя связан со вторым выходом третьего коммутатора, второй вход которого является входом постоянного сигнала, а выход интегрирующего усилителя подключен ко второму входу суммирующего усилителя, предназначенного для формирования суммирующего сигнала, выход задатчика управляющего сигнала через второй вход первого коммутатора и его первый выход подключен к четвертому входу второго коммутатора, а через второй выход первого коммутатора - ко второму входу суммирующего усилителя, предназначенного для формирования разностного сигнала.
Введение интегрирующего усилителя и суммирующего усилителя, предназначенного для формирования суммирующего сигнала, причем основной вход интегрирующего усилителя связан с выходом суммирующего усилителя, предназначенного для формирования разностного сигнала, подключенным также к первому входу суммирующего усилителя, предназначенного для формирования суммирующего сигнала, выход которого подключен ко второму входу второго коммутатора, выход которого связан со входом привода регулирующего органа, вход задания начальных условий интегрирующего усилителя связан с выходом датчика положения привода регулирующего органа, управляющий вход интегрирующего усилителя связан со вторым выходом третьего коммутатора, второй вход которого является входом постоянного сигнала, а выход интегрирующего усилителя подключен ко второму входу суммирующего усилителя, предназначенного для формирования суммирующего сигнала, обеспечивает повышение точности управления.
Подключение выхода задатчика управляющего сигнала через второй вход первого коммутатора и его второй выход ко второму входу суммирующего усилителя, предназначенного для формирования разностного сигнала, а через первый выход первого коммутатора - к четвертому входу второго коммутатора обеспечивает возможность использования единого задатчика для формирования управляющих сигналов на режимах автоматического и дистанционного управления и таким образом - повышение надежности устройства.
Введение блока памяти, основной вход которого связан с выходом датчика положения привода регулирующего органа, управляющий вход связан с первым выходом третьего коммутатора, а выход подключен к третьему входу второго коммутатора, обеспечивает реализацию режима консервации процесса управления.
Устройство безударного перехода с одного параметра управления на другой представлено на функциональной схеме, изображенной на чертеже, (может быть реализовано как Устройство управления исполнительными механизмами регулирующего органа).
Схема содержит задатчик управляющего сигнала 1, задатчик режима работы 2, первый коммутатор 3, второй коммутатор 4, третий коммутатор 5, суммирующий усилитель 6, предназначенный для формирования разностного сигнала, суммирующий усилитель 7, предназначенный для формирования суммирующего сигнала, интегрирующий усилитель 8, блок памяти 9, датчик положения привода регулирующего органа 10, датчик регулируемого параметра 11.
Задатчик управляющего сигнала 1 осуществляет задание аналогового сигнала, пропорционального положению регулирующего органа или значению регулируемого параметра. Он может быть реализован, например, с помощью потенциометра.
Задатчик режима работы 2 управляет переключением коммутаторов. Он представляет собой, например, трехпозиционный механический ключ, устанавливаемый в положения «автоматическое управление» (АУ), «режим консервации» (КОНС), «дистанционное управление» (ДУ).
Первый, второй и третий коммутаторы - осуществляют связь между элементами устройства и производят подключение к выходу устройства формируемого в нем управляющего сигнала по сигналам от задатчика режима работы 2.
Первый коммутатор 3 производит распределение сигналов от задатчика управляющего сигнала 1 по двум каналам управления: ДУ и АУ.
Второй коммутатор 4 осуществляет передачу на вход привода РО управляющего сигнала, сформированного в устройстве.
Третий коммутатор 5 управляет работой интегрирующего усилителя 8 и блока памяти 9.
Коммутаторы представляют собой, например, трехпозиционные электрические контакторы, механически связанные с задатчиком режима работы 2, осуществляющие синхронное переключение связей элементов устройства одновременно с перемещением ключа - задатчика режима работы 2.
Суммирующий усилитель 6, предназначенный для формирования разностного сигнала, формирует на своем выходе сигнал разности между сигналом, поступающим на его второй вход от задатчика управляющего сигнала 1, и сигналом от датчика регулируемого параметра 11, поступающим на его первый вход. Он может быть реализован в соответствии со схемой, представленной в источнике [2] на стр.291.
Суммирующий усилитель 7, предназначенный для формирования суммирующего сигнала, формирует на своем выходе сигнал, равный сумме сигналов, поступающих на его входы от суммирующего усилителя 6, предназначенного для формирования разностного сигнала, и от интегрирующего усилителя 8. Он может быть реализован в соответствии со схемой, представленной в источнике [1] на стр.24.
Интегрирующий усилитель 8 обеспечивает формирование интегральной составляющей управляющего сигнала в режиме АУ. Он имеет три входа: основной вход, вход задания начальных условий и управляющий вход. При подаче сигнала на управляющий вход, интегрирующий усилитель работает в режиме интегрирования сигнала, поступающего на его основной вход. При этом сигнал на выходе интегрирующего усилителя пропорционален интегралу от сигнала, подаваемого на его основной вход. При отсутствии сигнала на управляющем входе интегрирующего усилителя, он работает в режиме задания начальных условий интегрирования, формируемых по сигналу, подаваемому на вход задания начальных условий. При этом сигнал на выходе интегрирующего усилителя равен сигналу, подаваемому на вход задания начальных условий.
Реализация интегрирующего усилителя может быть выполнена с помощью схемы соединения электронных элементов, описанной в источнике [1] на стр.24.
Блок памяти 9 имеет два входа: основной и управляющий. Он обеспечивает «запоминание» значения сигнала, поступающего на его основной вход, при подаче сигнала на его управляющий вход. В этом случае на выходе блока памяти 9 формируется и сохраняется сигнал, равный сигналу на его основном входе в момент поступления управляющего сигнала на его управляющий вход. При отсутствии сигнала на управляющем входе блока памяти 9, блок памяти 9 работает как повторитель, и сигнал на его выходе равен сигналу на его основном входе.
Реализация блока памяти может быть выполнена с помощью схем соединения электронных элементов, описанных в источнике [1] на стр.125.
Работа устройства заключается в следующем.
В режиме «автоматическое управление» сигнал от задатчика управляющего сигнала 1 соответствует заданному значению регулируемого параметра. Задатчик режима работы 2 находится в положении АУ. При этом первый коммутатор 3 связывает выход задатчика управляющего сигнала 1 со вторым входом первого суммирующего усилителя 6, предназначенного для формирования разностного сигнала, на первый вход которого поступает сигнал из датчика регулируемого параметра 11. На выходе суммирующего усилителя 6, предназначенного для формирования разностного сигнала, формируется сигнал, пропорциональный разности сигналов заданного и измеренного значения регулируемого параметра (сигналу ошибки). Этот сигнал поступает на первый вход суммирующего усилителя 7, предназначенного для формирования суммирующего сигнала, и на основной вход интегрирующего усилителя 8. Одновременно на управляющий вход интегрирующего усилителя 8 поступает постоянный сигнал, передаваемый со второго входа третьего коммутатора 5 через его второй выход. По этому сигналу интегрирующий усилитель 8 работает в режиме интегрирования сигнала, поступающего на его основной вход, и на выходе интегрирующего усилителя 8 формируется сигнал, пропорциональный интегралу от сигнала ошибки. Этот сигнал поступает на второй вход суммирующего усилителя 7, предназначенного для формирования суммирующего сигнала, где он складывается с сигналом, поступившим на первый вход суммирующего усилителя 7, предназначенного для формирования суммирующего сигнала. Полученный таким образом пропорционально-интегральный управляющий сигнал поступает с выхода суммирующего усилителя 7, предназначенного для формирования суммирующего сигнала, через второй вход второго коммутатора 4 на его выход. Управляющий сигнал UУПР с выхода второго коммутатора 4 поступает на вход привода регулирующего органа. Под воздействием этого сигнала регулирующий орган (РО) перемещается в положение, обеспечивающее поддержание заданного значения регулируемого параметра с нулевой статической ошибкой (астатическое регулирование). Последнее обеспечивается за счет использования интегральной составляющей от сигнала ошибки при формировании управляющего сигнала UУПР, что создает повышенную точность управления. Использование при формировании управляющего сигнала UУПР пропорциональной составляющей от сигнала ошибки, поступающей на вход суммирующего усилителя 7, предназначенного для формирования суммирующего сигнала, с выхода суммирующего усилителя 6, предназначенного для формирования разностного сигнала, обеспечивает устойчивость процесса регулирования в режиме АУ.
При переключении режима работы устройства с автоматического на «дистанционное управление» или на «режим консервации», предварительно задатчик режима работы 2 устанавливают в положение КОНС. Это приводит к переключению первого, второго и третьего коммутаторов, в результате которого первый и второй выходы первого коммутатора 3 разобщаются с его входом, к выходу второго коммутатора 4 подключается его третий вход, а к первому выходу третьего коммутатора 5 подключается постоянный сигнал, подаваемый на его второй вход, при этом сигнал на втором выходе третьего коммутатора 5 обнуляется. Под воздействием постоянного сигнала, поступающего с первого выхода третьего коммутатора 5 на управляющий вход блока памяти 9, на выходе блока памяти 9 формируется сигнал, равный сигналу от датчика 10 положения РО в момент включения режима консервации. Этот сигнал через третий вход второго коммутатора 4 поступает на его выход в качестве управляющего сигнала UУПР. Поскольку сигнал UУПР задает то же самое положение привода РО, которое тот уже занимает, после переключения задатчика режима работы 2 в положение КОНС дополнительного перемещения РО не происходит, что обеспечивает безударный переход на режим консервации. Привод РО удерживается в этом положении на протяжении всего времени нахождения задатчика режима работы 2 в положении КОНС. Таким образом реализуется режим консервации и безударный переход на него.
Одновременно в результате обнуления сигнала, поступающего со второго выхода третьего коммутатора 5 на управляющий вход интегрирующего усилителя 8, происходит переключение интегрирующего усилителя 8 на режим задания начальных условий работы интегратора. При этом на выходе интегрирующего усилителя 8 формируется сигнал, равный сигналу от датчика положения привода РО 10, поступающему с выхода датчика 10 на вход задания начальных условий интегрирующего усилителя 8. Таким образом производится подготовка интегрирующего усилителя 8 к последующему его включению на режиме АУ.
Перед переключением с режима консервации на режим ДУ сигнал из задатчика управляющего сигнала 1 предварительно устанавливают равным сигналу от датчика положения привода РО 10. Поскольку на режиме консервации задатчик управляющего сигнала 1 разобщен при помощи первого коммутатора 3 с другими элементами устройства, изменение сигнала на выходе задатчика управляющего сигнала 1 не приведет к изменению работы этих элементов, и режим консервации будет сохранен. После переключения задатчика режима работы 2 в положение ДУ происходит переключение коммутаторов, в результате которого сигнал с выхода задатчика управляющего сигнала 1 через первый выход первого коммутатора 3 и четвертый вход второго коммутатора 4 поступает на выход второго коммутатора 4 в качестве управляющего сигнала UУПР. Поскольку этот сигнал был предварительно установлен равным сигналу от датчика положения привода РО 10, который соответствовал положению РО в момент, предшествующий переключению на режим ДУ, никакого перемещения РО в момент переключения режима работы не произойдет. Таким образом обеспечивается безударный переход с режима консервации на ДУ.
Одновременно в результате переключения третьего коммутатора 5 обнуляется сигнал на его первом выходе, а следовательно - и на управляющем входе блока памяти 9, и блок памяти 9 начинает работать как повторитель сигнала из датчика положения привода РО 10. На выходе интегрирующего усилителя 8 продолжает формироваться сигнал, равный сигналу отдатчика положения привода РО 10.
При работе на режиме ДУ изменение сигнала от задатчика управляющего сигнала 1 соответствует изменению управляющего сигнала UУПР, задающего положение РО.
При переключении с режима ДУ на режим АУ вначале задатчик режима работы 2 устанавливают в положение КОНС. Как показано выше, это приводит к переключению коммутаторов и блока памяти 9, в результате которого на выходе устройства формируется управляющий сигнал UУПР, равный сигналу от датчика положения привода РО 10, и привод РО удерживается в положении, которое он занимал до переключения задатчика режима работы 2. Затем сигнал от задатчика управляющего сигнала 1 устанавливают равным сигналу на выходе из датчика регулируемого параметра 11 и переключают задатчик режима работы 2 в положение АУ. При этом происходит переключение коммутаторов, в результате которого сигнал от задатчика управляющего сигнала 1 через второй выход первого коммутатора 3 поступает на второй вход суммирующего усилителя 6, предназначенного для формирования разностного сигнала, выход второго коммутатора 4 подключается к его второму входу, а второй вход третьего коммутатора 5 подключается к его второму выходу, сигнал на первом выходе третьего коммутатора 5 обнуляется, а через его второй выход на управляющий вход интегрирующего усилителя 8 поступает постоянный сигнал. По этому сигналу интегрирующий усилитель 8 переключается на режим интегрирования сигнала ошибки, поступающего на основной вход интегрирующего усилителя 8 с выхода усилителя 6, предназначенного для формирования разностного сигнала. Интегрирование проходит с начальных условий работы интегратора, соответствующих значению сигнала от датчика положения привода РО 10 в момент переключения задатчика режима работы 2 с режима консервации на АУ. Поскольку в момент переключения на режим АУ сигналы, поступающие на первый и второй входы усилителя 6, предназначенного для формирования разностного сигнала, равны, на выходе усилителя 6, предназначенного для формирования разностного сигнала, формируется нулевой сигнал, а на выходе интегрирующего усилителя 8 сохранится сигнал, равный сигналу от датчика положения привода РО 10. При этом на выходе усилителя 7, предназначенного для формирования суммирующего сигнала, а следовательно, и на выходе второго коммутатора 4 формируется управляющий сигнал UУПР, соответствующий положению, занимаемому РО до переключения задатчика режима работы 2, и никакого перемещения РО в момент переключения режима работы не произойдет. Таким образом обеспечивается безударный переход с режима ДУ на АУ.
В предложенном устройстве безударного перехода обеспечивается повышение точности регулирования (астатическое регулирование) за счет использования при формировании управляющего сигнала интегрирующего усилителя 8, формирующего интегральную составляющую управляющего сигнала от сигнала ошибки, и суммирующего усилителя, предназначенного для формирования суммирующего сигнала, формирующего пропорционально-интегральный управляющий сигнал.
Использование в устройстве одного задатчика управляющего сигнала вместо двух, в котором назначение задаваемого сигнала изменяется в соответствии с установленным режимом управления от задания значения регулируемого параметра на режиме АУ до задания положения РО на режиме ДУ, повышает надежность устройства.
Реализуемая устройством с помощью блока памяти возможность обеспечения по команде оператора фиксации (консервации) текущего положения РО в процессе его перемещения на режиме АУ дает оператору время разобраться в обстановке и принять правильное решение об изменении сигнала задания или о переходе на режим управления по другому параметру.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО БЕЗУДАРНОГО ПЕРЕХОДА С ОДНОГО ПАРАМЕТРА УПРАВЛЕНИЯ НА ДРУГОЙ | 2002 |
|
RU2223527C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ | 2001 |
|
RU2208528C1 |
| РЕГУЛЯТОР ПНЕВМОЭЛЕКТРИЧЕСКИЙ | 2005 |
|
RU2308067C2 |
| УСТРОЙСТВО ПЕРЕДАЧИ УПРАВЛЕНИЯ | 2014 |
|
RU2551795C1 |
| Устройство для программного управления | 1983 |
|
SU1117591A1 |
| Система регулирования турбины | 1985 |
|
SU1295012A1 |
| Система управления | 1979 |
|
SU830289A1 |
| БЛОК РУЧНОГО РЕЗЕРВИРОВАНИЯ | 2004 |
|
RU2282882C1 |
| Устройство для регулирования частоты вращения электропривода | 1989 |
|
SU1780081A1 |
| Автоматическая система компенсации | 1976 |
|
SU634239A1 |
Устройство безударного перехода с одного параметра управления на другой относится к автоматике и предназначено для использования в системах управления энергоустановками со следящим приводом регулирующего органа. Технический результат заключается в обеспечении возможности безударного перехода с одного параметра управления на другой на режимах дистанционного, автоматического управления и в режиме консервации процесса регулирования при повышении точности управления и надежности устройства. Устройство содержит задатчик управляющего сигнала, коммутаторы и задатчик режима работы, выход которого связан с первыми входами коммутаторов, суммирующий усилитель, предназначенный для формирования разностного сигнала, первый вход которого связан с выходом датчика регулируемого параметра, интегрирующий усилитель, блок памяти и суммирующий усилитель, предназначенный для формирования суммирующего сигнала. 1 ил.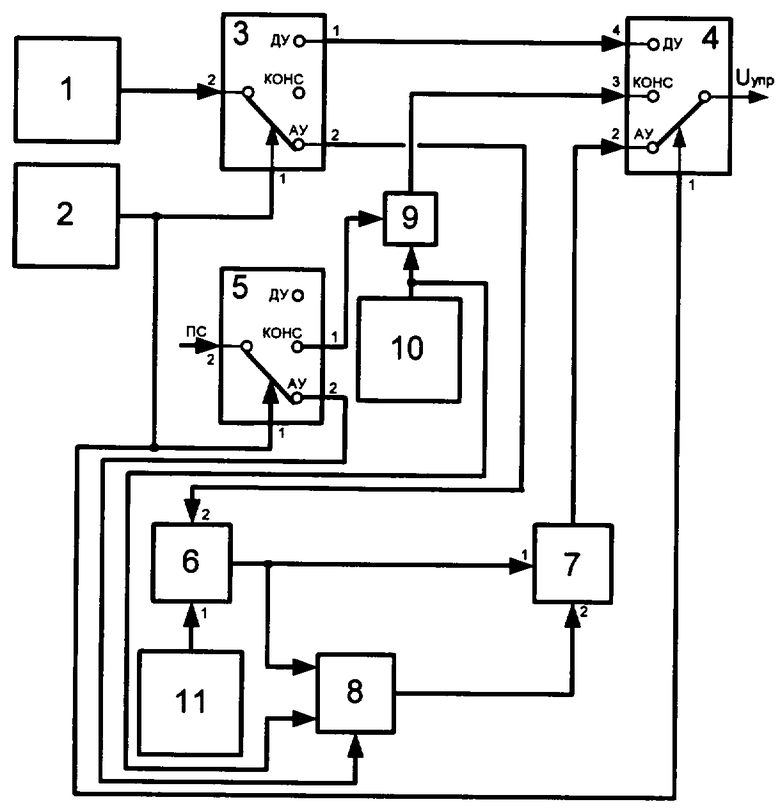
Устройство безударного перехода с одного параметра управления на другой, содержащее задатчик управляющего сигнала, коммутаторы и последовательный трехпозиционный переключатель режимов работы, выход которого связан с первыми входами коммутаторов, суммирующий усилитель, предназначенный для формирования разностного сигнала, первый вход которого связан с выходом датчика регулируемого параметра, отличающееся тем, что в него введены интегрирующий усилитель, блок памяти и суммирующий усилитель, предназначенный для формирования суммарного сигнала, причем основной вход интегрирующего усилителя связан с выходом суммирующего усилителя, предназначенного для формирования разностного сигнала, подключенным также к первому входу суммирующего усилителя, предназначенного для формирования суммарного сигнала, выход которого подключен ко входу «режим автоматического управления» коммутатора, осуществляющего передачу на вход привода регулирующего органа управляющего сигнала, сформированного в устройстве, вход задания начальных условий интегрирующего усилителя связан с выходом датчика положения привода регулирующего органа, подключенным также к основному входу блока памяти, управляющий вход которого связан с выходом «режим консервации процесса регулирования» коммутатора, управляющего работой интегрирующего усилителя и блока памяти, а выход подключен ко входу «режим консервации процесса регулирования» коммутатора, осуществляющего передачу на вход привода регулирующего органа управляющего сигнала, сформированного в устройстве, выход которого связан со входом привода регулирующего органа, управляющий вход интегрирующего усилителя связан с выходом «режим автоматического управления» коммутатора, управляющего работой интегрирующего усилителя и блока памяти, второй вход которого является входом постоянного сигнала, а выход интегрирующего усилителя подключен ко второму входу суммирующего усилителя, предназначенного для формирования суммарного сигнала, выход задатчика управляющего сигнала через второй вход коммутатора, обеспечивающего распределение заданных управляющих сигналов по каналам дистанционного и автоматического управления, и его выход «режим дистанционного управления» подключен ко входу «режим дистанционного управления» коммутатора, осуществляющего передачу на вход привода регулирующего органа управляющего сигнала, сформированного в устройстве, а через выход «режим автоматического управления» коммутатора, обеспечивающего распределение заданных управляющих сигналов по каналам дистанционного и автоматического управления - ко второму входу суммирующего усилителя, предназначенного для формирования разностного сигнала.
| УСТРОЙСТВО БЕЗУДАРНОГО ПЕРЕХОДА С ОДНОГО ПАРАМЕТРА УПРАВЛЕНИЯ НА ДРУГОЙ | 2002 |
|
RU2223527C2 |
| Система управления | 1978 |
|
SU742870A1 |
| СУПЕРВИЗОРНЫЙ ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОР | 1999 |
|
RU2157558C1 |
| СПОСОБ КАСКАДНОГО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ | 1996 |
|
RU2127895C1 |
| US 3940594 А, 24.02.1976 | |||
| Транспортная шина для нижней конечности | 1984 |
|
SU1237206A1 |

