Изобретение относится к области автоматики и предназначено для использования в системах управления испытательных машин с электрогидравлическим следящим приводом.
Устройства безударного перехода с одного параметра управления на другой в системах управления технологическими процессами достаточно известны и широко применяются на практике.
Так, в источнике [1] приводится несколько вариантов схем, реализующих безударный переход с внешнего задания на внутреннее и плавное отступление к последнему значению внешнего задания. Недостатком подобных схем является выполнение безударной передачи управления только между задающими устройствами.
Технология проведения испытаний материалов предъявляет более жесткие требования к системам управления испытательными машинами. При проведении отдельных видов испытаний непосредственно в процессе испытания необходимо осуществлять переход с одного параметра управления на другой, например с деформации образца на перемещение плунжера гидроцилиндра или на нагрузку, приложенную в данный момент к испытуемому объекту.
При выполнении перехода с одного параметра управления на другой нагрузка на испытуемом образце не должнa изменяться.
Варианты решения данной проблемы также широко известны и приведены в источниках [2] и [3].
Наиболее близким по технический сущности к предлагаемому является устройство [4].
Устройство для программного управления состоит из нескольких каналов управления, количество которых определяется количеством параметров управления, задействованных в технологии испытаний, в данном рассматриваемом случае их два.
Устройство содержит:
- единые для двух каналов управления блок управления, генератор импульсов, делитель частоты, коммутатор, исполнительный орган и объект управления;
- задающие канальные устройства, состоящие из коммутаторов, реверсивных счетчиков и цифроаналоговых преобразователей;
- контуры управления, состоящие из суммирующих усилителей, блоков триггеров, логических блоков и датчиков обратной связи.
Каждый из каналов работает в одном из двух режимов - режиме управления или режиме измерения, причем каналы не могут находиться в одинаковых режимах.
Работа устройства для программного управления достаточно полно рассмотрена в устройстве по авторскому свидетельству 1117591.
В известном устройстве, наиболее близком к предлагаемому, реализующем безударный переход, наблюдается наличие нулевого или близкого к нулю сигнала на выходе одного из суммирующих усилителей, работающего в режиме управления. Сигнал задания поступает не первый вход суммирующего усилителя, разностный сигнал с его выхода через коммутатор воздействует на исполнительный орган и далее на объект управления таким образом, что сигнал с датчика обратной связи уравнивается с сигналом задания соответствующего усилителя, работающего в данный момент в режиме управления, воздействие на исполнительный орган прекращается, и контур управления отслеживает заданный параметр.
Второй канал, находящийся в режиме измерения, работает следующим образом. Разностный сигнал с выхода суммирующего усилителя поступает на вход блока триггеров, где производится сравнение разностного сигнала с двумя заранее заданными, близкими к нулю порогами срабатывания: одним положительным и вторым отрицательным. Сигнал с выхода блока триггеров управляет реверсивным счетчиком и устанавливает его в такое состояние, при котором сигнал с цифроаналогового преобразователя уравнивается с сигналом соответствующего датчика, и система переходит в равновесное состояние, при котором на выходе суммирующего усилителя устанавливается сигнал, близкий к нулю и находящийся между заданными порогами. После поступления команды о передаче управления происходит подключение посредством коммутатора сигнала с выхода суммирующего усилителя к входу исполнительного устройства и процесс передачи управления заканчивается.
Главным недостатком такого способа безударной передачи управления является предпосылка о равенстве нулю разностного сигнала на выходе суммирующего усилителя канала управления. В действительности это далеко не так.
Разностный сигнал на выходе суммирующего усилителя при работе в режиме управления может существенно отличаться от нулевого вследствие следующих причин:
1. Суммирующий усилитель имеет определенный коэффициент усиления, выше которого система может войти в автоколебательный режим. Из-за конечного коэффициента усиления система управления имеет ошибку статизма, введение астатического звена не решает в данном случае проблему, поскольку появляется колебательность процесса слежения.
2. На выходе суммирующего усилителя может присутствовать собственное напряжение смещения, которое может флуктуировать в зависимости от температуры и времени.
3. Исполнительное устройство, которым является электрогидравлический преобразователь, имеет смещение "гидравлического нуля", т.е. изменение положения управляющего золотника, вызванное прогревом рабочей жидкости и изменением давления рабочей жидкости.
4. И, наконец, одна из наиболее серьезных причин - утечки рабочей жидкости по стенкам гидроцилиндра по периметру плунжера, которые зависят от развиваемой гидроцилиндром нагрузки и точности изготовления плунжерной пары.
Для компенсации утечек по стенкам гидроцилиндра и смещения "гидравлического нуля" исполнительного устройства сигнал на выходе суммирующего усилителя должен существенно отличаться от нулевого, что и наблюдается на самом деле.
Таким образом, безударный переход с параметра на параметр, реализованный по схеме прототипа, имеет существенные погрешности, температурную и временную нестабильность.
Предлагаемое устройство свободно от указанных недостатков.
Цель изобретения - повышение точности безударного перехода с одного параметра управления на другой.
Поставленная цель достигается тем, что в устройстве безударного перехода с одного параметра управления на другой, содержащем два канала с цифроаналоговыми преобразователями и датчиками обратных связей, выходы которых подключены к входам суммирующих усилителей, коммутаторы, осуществляющие подключение к исполнительному органу объекта управления того или другого параметра управления, выходы суммирующих усилителей обоих каналов соединены с входами коммутаторов и одним из входов двух компараторов, включенных в каждый из каналов, другие входы которых соединены между собой и подключены к выходам коммутаторов и входу исполнительного органа объекта управления, а коммутаторы в одном канале имеют размыкающий, а в другом канале - замыкающий контакты.
Устройство безударного перехода с одного параметра управления на другой представлено на функциональной схеме, показанной на чертеже.
Устройство содержит цифроаналоговые преобразователи 1 и 2, суммирующие усилители 3 и 4, коммутаторы 5 и 6, компараторы 7 и 8, исполнительный орган 9, объект управления 10, датчики обратной связи 11 и 12.
Цифроаналоговые преобразователи 1 и 2 осуществляют преобразование цифровых данных, поступающих от внешнего управляющего устройства, в аналоговые сигналы и могут быть выполнены как на дискретных элементах, так и на гибридных или интегральных микросхемах КМП 817 ПА1, КР 572 ПА2, МАХ 507 и т.д.
Суммирующие усилители 3 и 4 предназначены для суммирования аналоговых сигналов цифроаналоговых преобразователей 1 и 2 с сигналами датчиков обратной связи 11 и 12 соответственно. Суммирующие усилители могут быть выполнены на операционных усилителях общепромышленного применения, например, широко распространенной серии KP140.
Коммутаторы 5 и 6 применены для коммутации управляющих сигналов с выходов суммирующих усилителей. Особенностью этих коммутаторов является наличие в их структуре размыкающего и замыкающего контактов. Для этой цели могут быть применены коммутаторы КР590КН4.
Компараторы 7 и 8 предназначены для сравнения действующего в настоящий момент сигнала управления, поступающего на исполнительный орган с одного канала, и замещающего сигнала управления другого канала, готовящегося "взять" управление на себя.
Выходной сигнал компаратора 7 "разрешение перехода на 1-й канал" используется внешним управляющим устройством для снятия сигнала "передача управления", в результате чего первый коммутатор окажется замкнутым, а второй коммутатор - разомкнутым. В такой ситуации на вход исполнительного органа 9 поступает сигнал с выхода первого суммирующего усилителя, т.е. управление осуществляется по первому каналу.
Выходной сигнал компаратора 8 "разрешение перехода на 2-й канал" используется внешним управляющим устройством, наоборот, для выдачи сигнала "передача управления", в результате чего первый коммутатор окажется разомкнутым, а второй коммутатор - замкнутым. В такой ситуации на вход исполнительного органа 9 поступает сигнал с выхода второго суммирующего усилителя, т.е. управление осуществляется по второму каналу.
Исполнительный орган 9 представляет собой электрогидравлический усилитель, обеспечивающий подачу рабочей жидкости в полости гидроцилиндра - объекта управления 10.
Испытательная машина в своем составе имеет различные датчики, но для упрощения понимания сути процесса в функциональную схему включены только два из них - датчик нагрузки 11 и датчик деформации образца 12.
Работа устройства заключается в следующем.
Цифровой код от внешнего управляющего устройства, которое не отображено на схеме, поскольку не представляет интереса при рассмотрении данного вопроса, через "шину данных" записывается в цифроаналоговый преобразователь 1.
Аналоговый сигнал с выхода цифроаналогового преобразователя 1, представляющий собой сигнал задания, форма которого определяется методикой испытания, поступает на один из входов суммирующего усилителя 3. Сигнал обратной связи с выхода датчика нагрузки 11 поступает на другой вход суммирующего усилителя 3. Разностный сигнал (сигнал ошибки регулирования) через замкнутые контакты коммутатора 5 поступает на вход исполнительного устройства 9, которое производит перераспределение рабочей жидкости, поступающей в полости гидроцилиндра, таким образом, что на испытуемом образце создается нагрузка, измеряемая датчиком нагрузки 11, сигнал с которого уравнивает сигнал задания с цифроаналогового преобразователя 1, в результате чего система управления переходит в равновесное состояние, постоянно отслеживая изменение сигнала задания.
До настоящего момента работа системы управления испытательной машины ничем не отличалась от работы типичной системы автоматического регулирования.
Отличие возникает при передаче управления другому параметру управления.
Идея безударной передачи управления на другой параметр заключается в подмене действующего в настоящий момент сигнала управления, поступающего на вход электрогидравлического усилителя, другим, равным ему по величине сигналом управления второго канала управления.
Цифроаналоговый преобразователь 2, суммирующий усилитель 4 и датчик деформации образца 12 представляют собой второй канал управления, который предназначен для управления по деформации образца. Но поскольку выход суммирующего усилителя посредством коммутатора 6 отключен от исполнительного устройства 9, контур управления по деформации разомкнут, второй канал управления находится в ждущем режиме и не принимает участия в процессе регулирования.
Связующим звеном между этими каналами управления является компаратор 8. Он производит сравнение сигнала, поступающего на исполнительнее устройство 9, и сигнала, который заменит его после выполнения процесса уравнивания, т. е. после того, как он достигнет величины воздействующего в настоящий момент сигнала на исполнительный орган.
Процесс уравнивания производится следующим образом.
Как упоминалось выше, первый канал управления находится в замкнутом состоянии и выполняет функцию регулирования, второй канал разомкнут и находится в ждущем режиме.
В процессе подготовки безударного перехода в цифроаналоговый преобразователь 2 внешним управляющим устройством через "шину данных" по определенному алгоритму записываются цифровые данные. Алгоритм записи данных не является предметом рассмотрения, в простейшем варианте его можно рассматривать как процесс последовательного перебора данных. В процессе этого перебора аналоговый сигнал с цифроаналогового преобразователя 2 суммируется усилителем 4 с сигналом датчика деформации 12, и результирующий сигнал поступает на первый вход компаратора 8, на второй вход которого подается сигнал управления исполнительным устройством 9.
По достижении равенства этих сигналов компаратор 8 формирует сигнал "разрешение перехода на 2-й канал", который воспринимается внешним управляющим устройством. В ответ внешнее управляющее устройство выдает сигнал "передача управления", который переводит коммутаторы 5 и 6 в противоположное состояние, т.е. размыкает контакты коммутатора 5 и замыкает контакты коммутатора 6.
Таким образом, исполнительное устройство 9 отключается от выхода суммирующего усилителя 3 первого канала управления и через замкнутые контакты коммутатора 6 подключается к выходу суммирующего усилителе 4 второго канала управления. Именно в этот момент и происходит подмена действовавшего до передачи управления сигнала управления, поступавшего на вход исполнительного устройства, другим, равным ему по величине сигналом второго канала управления. Таким образом, второй канал управления теперь становится управляющим. Для исполнительного устройства и объекта управления при этом ничего не изменилось, на входе исполнительного устройства остался сигнал той же величины и полярности, что и до переключения, в связи с чем управляющее воздействие на объект управления не изменилось и соответственно не изменились сигналы с датчиков обратной связи.
Теперь каналы управления поменялись местами: управление ведется по деформации образца, а канал управления по нагрузке перешел в ждущий режим.
Обратная передаче управления осуществляется аналогично, только каналы поменяются местами. Теперь по достижении равенства входных сигналов уже компаратор 7 сформирует сигнал "разрешение перехода на 1-й канал", в ответ на который внешнее управляющее устройство снимет сигнал "передача управления" и переведет коммутаторы 5 и 6 в исходное состояние.
При данном способе реализации безударного перехода, когда сравниваются между собой сигнал, поступающий на исполнительное устройство, и сигнал, который его заменит после выполнения передачи управления, точность безударного перехода не зависит от величины и полярности разностного сигнала, и тем самым полностью устраняется недостаток, присущий прототипу.
Источники информации
1. Ялышев А.У., Разоренов О.И. Многофункциональные аналоговые регулирующие устройства автоматики. Изд. Машиностроение, 1981, УДК 62.551.4, стр. 69-74.
2. Патент ФРГ 2213436, кл. 42 к 34/04, 1974.
3. Авторское свидетельство СССР 711541, G 05 В 19/38, 1978.
4. Авторское свидетельство СССР 1117591, G 05 В 19/18, 1984 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ПЕРЕДАЧИ УПРАВЛЕНИЯ | 2014 |
|
RU2551795C1 |
| Устройство для программного управления | 1983 |
|
SU1117591A1 |
| УСТРОЙСТВО БЕЗУДАРНОГО ПЕРЕХОДА С ОДНОГО ПАРАМЕТРА УПРАВЛЕНИЯ НА ДРУГОЙ | 2007 |
|
RU2372637C2 |
| Устройство для управления технологическим объектом | 1985 |
|
SU1275377A1 |
| МНОГОКАНАЛЬНОЕ УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ЖИДКИХ СРЕД | 1992 |
|
RU2045055C1 |
| Многоканальный широтно-импульсный регулятор температуры (его варианты) | 1981 |
|
SU978111A1 |
| УСТРОЙСТВО СБОРА, ПРЕОБРАЗОВАНИЯ И ПЕРЕДАЧИ РЕЗУЛЬТАТОВ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ФИЗИЧЕСКОЙ СРЕДЫ | 1994 |
|
RU2079882C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ НАГРЕВАТЕЛЯМИ АППАРАТУРЫ КОСМИЧЕСКОГО АППАРАТА | 2014 |
|
RU2571728C1 |
| Устройство для измерения и коррекции перекоса камеры судоподъемника | 1989 |
|
SU1735804A1 |
| СИСТЕМА УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2395704C1 |
Изобретение относится к автоматике и предназначено для использования в системах управления испытательных машин с электрогидравлическим следящим приводом. Технический результат заключается в повышении точности безударного перехода с одного параметра управления на другой. Устройство содержит два канала с цифроаналоговыми преобразователями и датчиками обратных связей, выходы которых подключены к входам суммирующих усилителей, коммутаторы, осуществляющие подключение к исполнительному органу объекта управления того или другого параметра управления, выходы суммирующих усилителей обоих каналов соединены с входами коммутаторов и одним из входов двух компараторов, включенных в каждый из каналов, другие входы которых соединены между собой и подключены к выходам коммутаторов и входу исполнительного органа объекта управления, а коммутаторы в одном канале имеют размыкающий, а в другом канале - замыкающий контакты. 1 ил.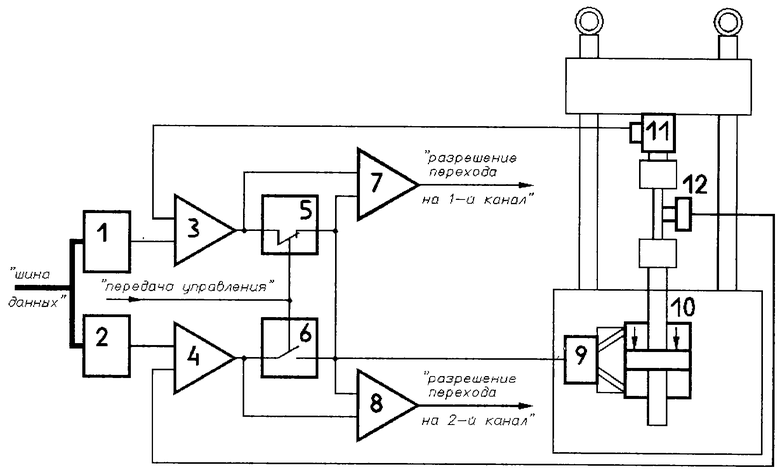
Устройство безударного перехода с одного параметра управления на другой, содержащее два канала с цифроаналоговыми преобразователями, сигнал задания с выходов которых поступает на одни входы суммирующих усилителей, предназначенных для формирования разностного сигнала, другие входы которых подключены к выходам датчиков обратных связей, коммутаторы, осуществляющие подключение к исполнительному органу объекта управления того или другого параметра управления, отличающееся тем, что выход суммирующего усилителя каждого канала соединен со входом коммутатора своего канала и одним из входов компаратора, включенного в этот канал и предназначенного для формирования сигнала “разрешение перехода”, который воспринимается внешним управляющим устройством, выдающим сигнал, переводящий коммутаторы в противоположное состояние, а другие входы компараторов соединены между собой и подключены к выходам коммутаторов, имеющих в одном канале размыкающий, в другом замыкающий контакты, и входу исполнительного органа объекта управления.
| Устройство для программного управления | 1983 |
|
SU1117591A1 |
| Система управления | 1979 |
|
SU830289A1 |
| US 3940594 А, 24.02.1976 | |||
| Транспортная шина для нижней конечности | 1984 |
|
SU1237206A1 |
| ЯЛЫШЕВ А.У | |||
| и др | |||
| Многофункциональные аналоговые регулирующие устройства автоматики | |||
| - М.: Машиностроение, 1981, с.69-74. | |||

