Предлагаемое изобретение относится к автоматике и вычислительной технике и может быть использовано при проектировании систем управления исследовательскими процессами, в частности при разработке автоматизированной системы, предназначенной для определения физико-механических свойств материалов методом кинетического индентирования.
Известно устройство для управления выводом данных [1]. Данное устройство обладает невысокой точностью в области малых сигналов.
Известна также система управления выводом данных, представляющая собой наиболее близкое техническое решение к заявленному предлагаемому изобретению [2]. Эта система также обладает низкой точностью в области малых сигналов.
Целью предполагаемого изобретения является повышение точностных характеристик устройства управления выводом данных при определении физико-механических свойств материалов методом кинетического индентирования.
Технический результат достигается тем, что в устройство управления выводом данных (устройство), содержащее регистр 2 памяти данных (регистр 2), цифроаналоговый преобразователь 5 (ЦАП 5), входную шину 7 и выходную шину 8, введены регистр 1, блок 3 ключей, блок 4 резисторов, а также дополнительная входная шина 6, причем вход регистра 1 подключен к дополнительной входной шине 6, а выход - к входу блока 3 ключей, который своим выходом соединен с первым входом блока 4 резисторов. Регистр 2 своим входом связан с входной шиной 7, а выходом объединен с входом ЦАП 5, выход которого подключен к второму входу блока 4 резисторов. Выход блока 4 резисторов связан с выходной шиной 8.
Рассмотрим работу устройства на его конкретном применении в автоматизированной системе, предназначенной для определения физико-механических свойств материалов методом кинетического индентирования. В течение цикла индентирования с входной шины 7 на вход регистра 2 поступают коды величины силы воздействия индентора на исследуемый материал. Синхронизирующими сигналами, поступающими с этой же шины, эти коды записываются в регистр 2 и устанавливаются на его выходе и, соответственно, на входе ЦАП 5, который, в свою очередь, формирует на своем выходе и, соответственно, на втором входе блока 4 резисторов аналоговый сигнал, величина которого пропорциональна величине этих кодов. Этот аналоговый сигнал, пройдя через блок 4 резисторов на выходную шину 8, поступает на вход генератора силы (на Фиг. не показан) с входным сопротивлением 1R (1R - это весовое соотношение сопротивлений). Этот генератор силы преобразует в силу ток, проходящий через входное сопротивление 1R, при этом величина силы будет пропорциональна величине этого тока. Блок 4 резисторов состоит из цепочки последовательно соединенных резисторов с весовым соотношением 1R, 3R, 7R, 15R, 31R, 63R, 127R, 255R, при этом оба вывода каждого из этих резисторов цепочки представляют собой первый вход блока 4 резисторов. Один из конечных выводов цепочки является вторым входом, а другой - выходом этого же блока 4 резисторов. В данном устройстве в блоке 3 ключей применены твердотельные реле (реле) [3] с гальванической развязкой вход-выход. При записи в регистр 1 кода 8016 все реле блока 3 ключей, кроме реле, подключенного к выводам резистора с весовым соотношением 255R, будут находиться в открытом состоянии (сопротивление открытого реле относительно величины R бесконечно мало), тогда аналоговый сигнал с выхода ЦАП 5 пройдет на выходную шину 8 и, соответственно, на вход генератора силы через все открытые реле, резистор 255R и входное сопротивление 1R генератора силы, который в соответствии с этим сформирует силу, величина которой составляет одну двухсот пятидесяти шестую часть ее максимального значения.
При записи в регистр 1 кодов 4016, 2016, 1016, 0816, 0416, 0216 или 0116 генератор силы сформирует одну ста двадцати восьмую, одну шести десяти четвертую, одну тридцати вторую, одну шестнадцатую, одну восьмую, одну четвертую или одну вторую соответственно часть силы от ее максимального значения. Если в регистр 1 будет записан код 0016, все реле блока 3 ключей будут находиться в открытом состоянии, тогда аналоговый сигнал с выхода ЦАП 5 полностью пройдет на выходную шину 8 и, соответственно, на вход генератора силы, который в соответствии с этим сформирует силу максимальной величины.
Одним из основных параметров цикла индентирования является максимальная величина силы воздействия индентора на исследуемый материал через определенный интервал времени от начала этого цикла.
В начальный момент цикла индентирования с дополнительной входной шины 6 в регистр 1 записывается код 8016.Коды величины силы с входной шины 7 последовательно во времени записываются в регистр 2 и далее в ЦАП 5 преобразуются в аналоговый сигнал, который, пройдя через резистор 255R блока 4 резисторов и входное сопротивление генератора силы, равное 1R, создаст ток, величина которого составит одну двухсот пятидесяти шестую часть от его максимального значения. После записи в регистр 2 всех кодов этой части максимального значения в регистр 1 записывается код 4016 и в регистр 2 также последовательно во времени записываются коды величин силы одной ста двадцати восьмой части от его максимального значения. Вышеописанные циклы записи кодов в регистр 1 и регистр 2 продолжаются до тех пор, пока величина силы, формируемой генератором силы, не достигнет установленной величины силы воздействия индентора на исследуемый материал. Таким образом, весь цикл индентирования состоит из нескольких этапов, начинающихся с области формирования малых сигналов с выхода блока 4 резисторов, что эквивалентно функционированию ЦАП 5 с весом его младшего значащего разряда, равным одной двухсот пятидесяти шестой части от его максимального значения, и, соответственно, с области формирования малых величин сил воздействия индентора на исследуемый материал, при этом точность определения физико-механических свойств материалов методом кинетического индентирования возрастает.
Источники информации
[1] Патент РФ №2445673, 17.11.2010 г.
[2] Патент РФ №2445675, 17.11.2010 г.
[3] www.Irf.com PVN 012А PbF
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ВЫВОДОМ ДАННЫХ | 2012 |
|
RU2522025C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЫВОДОМ ДАННЫХ | 2013 |
|
RU2547620C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЫВОДОМ ДАННЫХ | 2010 |
|
RU2445675C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ВЫВОДОМ ДАННЫХ | 2010 |
|
RU2445673C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЫВОДОМ ДАННЫХ С ДИНАМИЧЕСКОЙ БАЛАНСИРОВКОЙ "НУЛЯ" | 2012 |
|
RU2503990C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ВЫВОДОМ ДАННЫХ | 2013 |
|
RU2549513C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЫВОДОМ ДАННЫХ | 2010 |
|
RU2420788C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВВОДОМ-ВЫВОДОМ ДАННЫХ | 2010 |
|
RU2427881C1 |
| ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ В ЦИФРОВОЙ КОД | 2005 |
|
RU2298193C1 |
| ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ В НАПРЯЖЕНИЕ С АВТОМАТИЧЕСКИМ ВЫБОРОМ ДИАПАЗОНА | 2005 |
|
RU2296945C1 |
Изобретение относится к автоматике и вычислительной технике. Технический результат заключается в повышении точностных характеристик устройства управления выводом данных. Устройство содержит регистр памяти данных, цифроаналоговый преобразователь, входную и выходную шины, регистр, блок ключей, блок резисторов и дополнительную входную шину. 1 ил.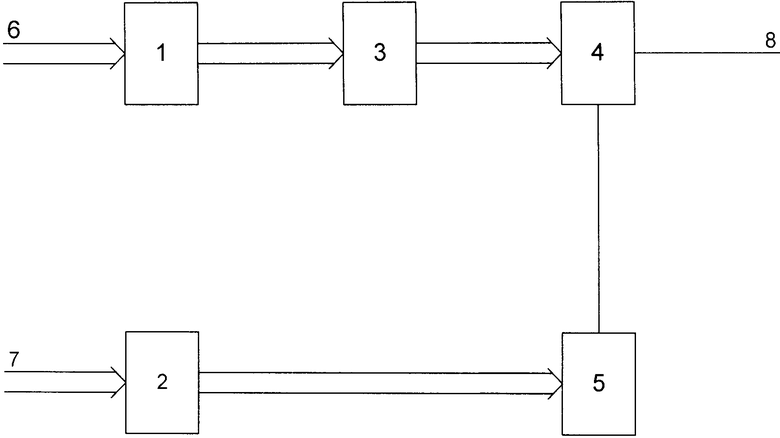
Устройство управления выводом данных, содержащее регистр памяти данных, цифро-аналоговый преобразователь, входную и выходную шины, отличающееся тем, что дополнительно содержит регистр, блок ключей, блок резисторов, а также дополнительную входную шину, причем вход регистра подключен к дополнительной входной шине, а выход - к входу блока ключей, который своим выходом соединен с первым входом блока резисторов, вход регистра памяти данных связан с входной шиной, а выход объединен с входом цифро-аналогового преобразователя, выход которого подключен к второму входу блока резисторов, выход блока резисторов связан с выходной шиной.
| СИСТЕМА УПРАВЛЕНИЯ ВЫВОДОМ ДАННЫХ | 2010 |
|
RU2445675C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ВЫВОДОМ ДАННЫХ | 2010 |
|
RU2445673C1 |
| Дисперсионный анализатор спектра | 1985 |
|
SU1264096A1 |
| Устройство управления вводом-выводом | 1976 |
|
SU586452A1 |
| Устройство для управления выводом данных в старт-стопном режиме | 1976 |
|
SU583423A1 |

