Изобретение относится к автоматике и вычислительной технике и может быть использовано при проектировании систем управления исследовательскими процессами, в частности при разработке автоматизированной системы, предназначенной для определения физико-механических свойств материалов методом кинетического индентирования.
Известно устройство для управления выводом данных [1]. Недостатком этого устройства является ограниченный диапазон величин сил воздействия индентора на исследуемый материал.
Известна также система управления выводом данных, представляющая собой наиболее близкое техническое решение к заявленному предлагаемому изобретению [2].
Недостатком этой системы является также ограниченный диапазон величин сил воздействия индентора на исследуемый материал.
Целью предполагаемого изобретения является расширение диапазона величин сил воздействия индентора на исследуемый материал.
Технический результат достигается тем, что в систему управления выводом данных, содержащую блок 1 связи, цифровой управляемый генератор 3, регистр 2 памяти данных, блок 4 памяти, выходной регистр 6, цифроаналоговый преобразователь 7, а также входную и выходную шины 12 и 13, соответственно, причем вход блока 1 связи соединен с входной шиной 12, а выход подключен к объединенным между собой входам цифрового управляемого генератора 3 и регистра 2 памяти данных, выход которого подключен к входу блока 4 памяти, выход выходного регистра 6 соединен с входом цифроаналогового преобразователя 7, выходом связанного с выходной шиной 13. Система управления выводом данных дополнительно содержит регистр 5, дополнительный цифроаналоговый преобразователь 9, источник 10 опорного напряжения, первый и второй резисторы 8 и 11, соответственно, причем выход блока 1 связи дополнительно связан с входом регистра 5, выход которого объединен с первым входом дополнительного цифроаналогового преобразователя 9, выходом подключенного к одному из выводов первого резистора 8. Выход источника 10 опорного напряжения соединен с объединенными между собой вторым входом дополнительного цифроаналогового преобразователя 9 и одним из выводов второго резистора 11, дополнительный вход цифроаналогового преобразователя 7 (вход для подключения источника опорного напряжения) соединен со связанными между собой другими выводами первого и второго резисторов 8 и 11, соответственно. Выход блока 4 памяти подключен к первому входу выходного регистра 6, второй вход выходного регистра 6 объединен с дополнительным входом блока 4 памяти и соединен с выходом цифрового управляемого генератора 3.
Рассмотрим работу системы управления выводом данных на ее конкретном применении в автоматизированной системе, предназначенной для определения физико-механических свойств материалов методом кинетического индентирования.
Блок 1 связи шиной 12 соединен с управляющей ЭВМ (не показана). В начале цикла индентирования управляющая этим циклом программа, функционирующая в ЭВМ, записывает через блок 1 связи в цифровой управляемый генератор 3 код периода меток времени, а также через регистр 2 памяти данных в блок 4 памяти массив кодов данных, представляющих собой цифровые коды величины силы воздействия индентора на исследуемый материал по меткам времени в процессе цикла индентирования. После завершения записи массива кодов данных в блок 4 памяти из ЭВМ по команде управляющей программы в блок 1 связи поступит код начала собственно цикла индентирования. С приходом этого кода блок 1 связи выдает на вход цифрового управляемого генератора 3 сигнал, разрешающий этому генератору формировать на своем выходе последовательность импульсов как метки времени с периодом следования, определяемого величиной предварительно записанного в него кода. Период следования меток времени в данной системе находится в интервале от 1 миллисекунды до 256 миллисекунд. Первый импульс с выхода цифрового управляемого генератора 3 инициирует выдачу на выход блока 4 памяти предварительно записанного в него первого слова кода данных, а также записывает выходной код в выходной регистр 6. Далее этот код преобразуется цифроаналоговым преобразователем 7 в аналоговый эквивалент, который поступает в выходную шину 13. Действие очередных импульсов с выхода цифрового управляемого генератора 3 аналогично вышеописанному. Таким образом, последовательность импульсов с выхода цифрового управляемого генератора 3 приведет к формированию на выходе цифроаналогового преобразователя 7 последовательности ступенчатого аналогового напряжения. Генератор силы (не показан), подключенный к выходной шине 13, сформирует силу воздействия индентора на исследуемый материал, величина которой пропорциональна величине кода на входе цифроаналогового преобразователя 7. В автоматизированной системе, предназначенной для определения физико-механических свойств материалов методом кинетического индентирования, в состав которой входит данная система управления выводом данных, наиболее часто используется режим линейно ступенчатой возрастающей до установленного значения величины силы за также установленный интервал времени. В этом случае необходимо в блок 4 памяти записать последовательно возрастающие на "единицу" коды, т.е. 000016, 000116, … FFFF16 (цифроаналоговый преобразователь 7 - шестнадцатиразрядный). Период меток времени определяется как Tмет.врем=tиндент/65536, где Tмет.врем - период меток времени, tиндент - время индентирования, 65536 - максимально возможное количество неповторяющихся кодов величины силы при вышеуказанном режиме индентирования. При получении результата дробной величины целочисленная часть увеличивается на "единицу", после чего в цифровой управляемый генератор 3 необходимо записать шестнадцатеричный код полученного результата величины периода меток времени.
Далее вычисляется количество меток времени как N=tиндент/Tмет.врем, где N - количество меток времени. После этого определяется реальное время индентирования как tиндент.реальн=N (целочисленная величина) · Tмет.врем, где tиндент.реальн, - реальное время индентирования. Далее находим необходимую величину веса младшего значащего разряда цифроаналогового преобразователя 7 как B=F/N, где F - заданная максимальная величина силы воздействия индентора на исследуемый материал, B - необходимая величина веса младшего значащего разряда цифроаналогового преобразователя 7, после чего определяем процентное отношение величины B к A, т.е. K=B/A·100%, где A - величина веса младшего значащего разряда цифроаналогового преобразователя 7 в установленном диапазоне сил (в данной системе установлены величины веса младшего значащего разряда цифроаналогового преобразователя 7 как …1, 2, 4, 8… миллиграмм силы, при этом максимальная величина силы в установленном диапазоне сил определяется как Fmax.=A·65535 миллиграмм силы, где Fmax - максимальная величина силы в установленном диапазоне сил), K - величина отношения B к A в процентах. Таким образом, для получения величины В необходимо увеличить величину A, при этом величина коррекции, т.е. увеличение веса младшего значащего разряда цифроаналогового преобразователя 7 до величины B в процентах, будет как C=K-100%, где C - величина коррекции в процентах. Далее определяем величину веса младшего значащего разряда в процентах дополнительного цифроаналогового преобразователя 9 как P=100%/65536 (данный преобразователь - шестнадцатиразрядный), после чего вычисляем величину кода коррекции как L=C/P, где L - величина кода коррекции, и величину этого вычисления в шестнадцатеричном виде записываем в регистр 5. На выходе дополнительного цифроаналогового преобразователя 9 при установке на его первом входе кода коррекции будет сформировано аналоговое напряжение по величине пропорциональное величине входного кода коррекции. Источник 10 опорного напряжения, дополнительный цифроаналоговый преобразователь 9, первый и второй резисторы 8 и 11, соответственно (в данной системе величины этих резисторов одинаковы), а также дополнительный вход цифроаналогового преобразователя 7, (вход подключения источника опорного напряжения) с их взаимосвязями (см.чертеж) обеспечивают увеличение величины веса младшего значащего разряда цифроаналогового преобразователя 7 до необходимой величины. Согласно вышеприведенному алгоритму определения величины кода коррекции величины младшего значащего разряда цифроаналогового преобразователя 7 при установке максимальной величины силы, например 830 грамм силы и времени индентирования 14 минут величина кода коррекции будет равна 39692,8168 или 9B0C16. Величина этого кода на входе дополнительного цифроаналогового преобразователя 9 приведет к формированию на его выходе напряжения, равного плюс 6,0566… вольт (выходное напряжение источника 10 опорного напряжения равно плюс 10 вольт), а на дополнительном входе цифроаналогового преобразователя 7 - плюс 8,02832 вольта, что приведет к увеличению веса младшего значащего разряда цифроаналогового преобразователя 7 до необходимой величины.
Таким образом, совокупность компонентов системы с их взаимосвязями обеспечивает расширение диапазона величин сил в режиме их линейно-ступенчатого изменения.
Источники информации
1. Патент РФ, кл. G06F 3/00, №2245673, 17.11.2010.
2. Патент РФ, кл. G06F 3/06, №2445675, 17.11.2010.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ ВЫВОДОМ ДАННЫХ | 2012 |
|
RU2551807C2 |
| СИСТЕМА УПРАВЛЕНИЯ ВЫВОДОМ ДАННЫХ | 2010 |
|
RU2420788C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЫВОДОМ ДАННЫХ | 2010 |
|
RU2445675C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ВЫВОДОМ ДАННЫХ | 2013 |
|
RU2549513C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ВЫВОДОМ ДАННЫХ | 2010 |
|
RU2445673C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЫВОДОМ ДАННЫХ | 2012 |
|
RU2522025C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВВОДОМ-ВЫВОДОМ ДАННЫХ | 2010 |
|
RU2427881C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЫВОДОМ ДАННЫХ С ДИНАМИЧЕСКОЙ БАЛАНСИРОВКОЙ "НУЛЯ" | 2012 |
|
RU2503990C1 |
| ПРЕОБРАЗОВАТЕЛЬ ВЕЛИЧИНЫ СИЛЫ ВОЗДЕЙСТВИЯ В НАПРЯЖЕНИЕ | 2005 |
|
RU2304283C1 |
| ПРЕОБРАЗОВАТЕЛЬ МЕХАНИЧЕСКИХ ВЕЛИЧИН В НАПРЯЖЕНИЕ С АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКОЙ "НУЛЯ" | 2005 |
|
RU2304284C2 |
Изобретение относится к автоматике и вычислительной технике и может быть использовано при проектировании систем управления исследовательскими процессами, в частности при разработке автоматизированной системы, предназначенной для определения физико-механических свойств материалов методом кинетического индентирования. Техническим результатом является расширение диапазона величин сил в режиме их линейно-ступенчатого изменения. Система управления выводом данных содержит блок связи, цифровой управляемый генератор, регистр памяти данных, блок памяти, первый и второй резисторы, а также регистр, выходной регистр, цифроаналоговый преобразователь, дополнительный цифроаналоговый преобразователь, источник опорного напряжения, а также входную и выходную шины. 1 ил.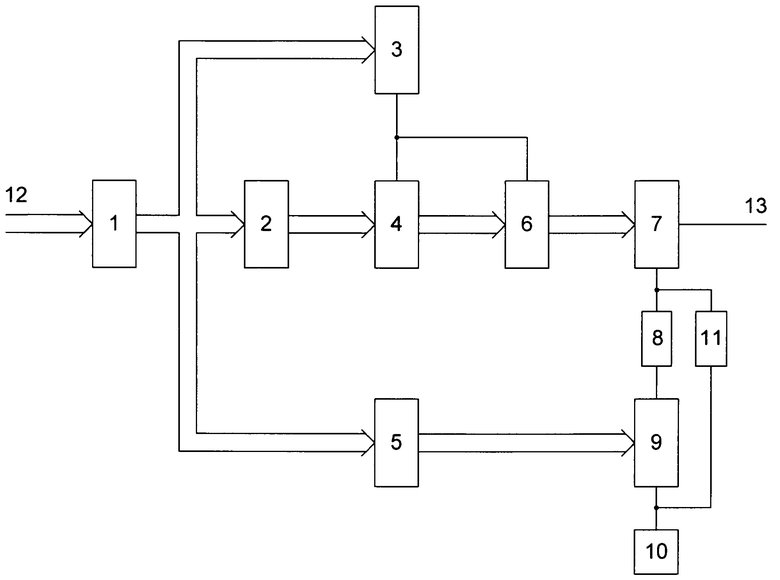
Система управления выводом данных, содержащая блок связи, цифровой управляемый генератор, регистр памяти данных, блок памяти, выходной регистр, цифроаналоговый преобразователь, а также входную и выходную шины, причем вход блока связи соединен с входной шиной, а выход подключен к объединенным между собой входам цифрового управляемого генератора и регистра памяти данных, выход которого подключен к входу блока памяти, выход выходного регистра соединен с входом цифроаналогового преобразователя, выходом связанного с выходной шиной, отличающаяся тем, что в нее дополнительно введены регистр, дополнительный цифроаналоговый преобразователь, источник опорного напряжения, а также первый и второй резисторы, причем выход блока связи дополнительно связан с входом регистра, выход которого объединен с первым входом дополнительного цифроаналогового преобразователя, выходом подключенного к одному из выводов первого резистора, выход источника опорного напряжения соединен с объединенными между собой вторым входом дополнительного цифроаналогового преобразователя и одним из выводов второго резистора, дополнительный вход цифроаналогового преобразователя соединен со связанными между собой другими выводами первого и второго резисторов, выход блока памяти подключен к первому входу выходного регистра, второй вход выходного регистра объединен с дополнительным входом блока памяти и соединен с выходом цифрового управляемого генератора.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для выпрямления опрокинувшихся на бок и затонувших у берега судов | 1922 |
|
SU85A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |

