Изобретение относится к медицине, а именно к ортопедической диагностике, и может быть использовано при диагностическом обследовании пациентов. Изобретение может также найти применение в обувной промышленности при конструировании и изготовлении ортопедической обуви.
Известен способ определения рельефа плантарной поверхности стоп, основанный на перемещении измерительных стержней в соответствии с формой поверхности стопы [Авторское свидетельство СССР № 1132915, кл. А61В 5/10, 1985 г.]. Под действием давления, оказываемого стопой человека, происходит смещение измерительных стержней. Использование электромеханических датчиков позволяет трансформировать механическое смещение в электрическое сопротивление, которое зависит от величины утопания стержня. Результаты измерений фиксируются на светочувствительной бумаге. По измеренной величине утопания стержней судят о форме плантарной поверхности стоп. Недостатками способа, а также реализующего его устройства является невысокое пространственное разрешение, поскольку стержень имеет конечные размеры, что является ограничением бесконечного увеличения числа измерительных стержней. Кроме того, для способа характерны низкая точность определения формы стопы за счет погрешности, обусловленной погружением стержней в мягкую ткань исследуемой поверхности, а также высокое время проведения обследования (не менее 20 мин).
Известен способ определения формы стоп человека [Способ определения формы стоп и устройство для его осуществления, патент 2177249, RU], который заключается в том, что стопы устанавливают на рабочую поверхность оптически прозрачной и горизонтально расположенной опорной пластины, проецируют на подошвенную поверхность стоп под заданным углом систему оптически контрастных полос, регистрируют отраженное изображения подошвенной поверхности стоп, причем предварительно на рабочей поверхности опорной пластины размещают калибровочную пластину с плоской матовой отражающей поверхностью, на которую также проецируют под заданным углом пространственную систему оптически контрастных полос, и регистрируют отраженное от калибровочной пластины изображение полос, по которому получают калибровочные значения в цифровом виде, при этом направление регистрации не совпадает с направлением проецирования, а по зарегистрированным изображениям подошвенной поверхности стоп с учетом калибровочных значений восстанавливают в цифровом виде трехмерную модель подошвенной поверхности стоп и по ее параметрам судят о поверхности стоп.
Данный способ принят за прототип.
Основным недостатком прототипа является сложность технического обеспечения реализации способа.
Согласно медицинским требованиям [Конструирование и технология ортопедической обуви: Учебное пособие для техникумов / И.К. Горелова, Е.Е. Аржанникова, Р.А. Иванов и др. Под ред. канд. мед. наук. Е.Е. Аржанниковой, старш. науч. сотр. И.К. Гореловой. - СПб, 1996. - 342 с.] для построения рельефа следа колодок в соответствии с отделами стопы, подлежащими коррекции сводоформирующими и сводоподдерживающими полустельками, необходима информация о рельефе стопы для четырех сечений (в частности для обуви детей дошкольного и школьного возраста, расположенных на расстоянии 0.20D, 0.33D, 0.36D и 0.62D от наиболее удаленной точки пяточного отдела на продольно-осевой линии, где D - длина стопы). Указанный способ предполагает считывание и обработку данных о рельефе всей поверхности стопы и не обеспечивает непосредственное получение информации о рельефе поверхности стопы в вышеупомянутых сечениях. Для получения необходимой информации о рельефе поверхности стопы в указанных сечениях требуется проведение дополнительных операций.
Задачей, на решение которой направлено изобретение, является упрощение процесса определения формы поверхности стопы, а именно: непосредственное получение количественных данных о рельефе стопы в требуемых сечениях.
Технический результат предлагаемого изобретения состоит в возможности в реальном масштабе времени получать данные о рельефе поверхности подподошвенной части стопы в нагруженном состоянии (при стоянии).
Решение поставленной задачи достигается тем, что в известном способе, включающем установку стопы на рабочую поверхность оптически прозрачной и горизонтально расположенной опорной пластины, проецирование на подошвенную поверхность стопы под заданным углом оптически контрастных полос, регистрацию отраженного изображения подошвенной поверхности стопы, размещение на рабочей поверхности опорной пластины калибровочной пластины с плоской матовой отражающей поверхностью, на которую также проецируют под заданным углом пространственную систему оптически контрастных полос, и регистрацию отраженного от калибровочной пластины изображения полос, по которому получают калибровочные значения в цифровом виде, при этом направление регистрации не совпадает с направлением проецирования, а по зарегистрированным изображениям полос на подошвенной поверхности стопы с учетом калибровочных значений получают количественные данные о форме подошвенной поверхности стопы, согласно изобретению система проецированных оптически контрастных полос состоит из продольно-осевой линии стопы, проходящей через наиболее удаленную точку пяточного отдела стопы и наиболее удаленную точку среднего пальца, и шести параллельных полос, ориентированных перпендикулярно продольно-осевой линии стопы, при этом первая полоса совмещена с наиболее удаленной точкой пяточного отдела на продольно-осевой линии стопы, шестая полоса совмещена с конечной точкой стопы, а расстояния от первой полосы до второй, третьей, четвертой и пятой полос соответственно равны произведениям коэффициентов k12, k13, k14, k15 на D, где D - длина стопы, величины коэффициентов k12, k13, k14, k15 определяются возрастной группой пациентов, причем осевые лучи направления проецирования перпендикулярны к опорной пластине, а направление регистрации лежит в плоскости, проходящей через продольно-осевую линию стопы и перпендикуляр, восстановленный к опорной пластине.
Сущность изобретения поясняется чертежами.
На фиг.1 показана стопа с проецируемой на нее системой из шести полос, обозначенных C1-С6. Изображение представлено в направлении вектора проецирования полос. Расстояния между полосами, указанные на чертежах, приведены для конкретной возрастной группы - детей дошкольного и школьного возраста: k12=0.20, k13=0.33, k14=0.36, k15=0.62. Взаимное положение стопы и полос настроено: продольно-осевая линия стопы M-N проходит через наиболее удаленную точку пяточного отдела стопы и наиболее удаленную точку среднего пальца, первая полоса совмещена с наиболее удаленной точкой пяточного отдела на продольно-осевой линии стопы, а шестая - с конечной точкой стопы.
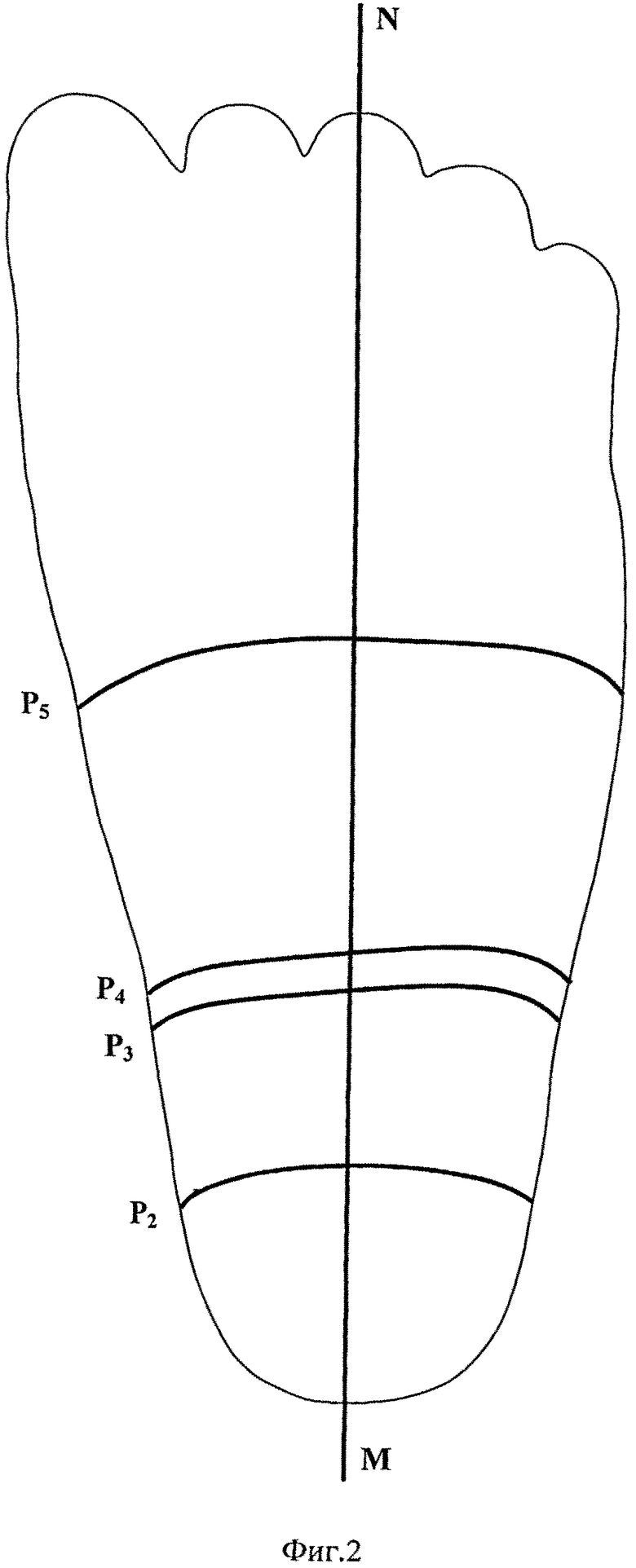
На фиг.2 представлено изображение стопы с системой деформированных полос Р2-Р5. Изображение получено в направлении вектора регистрации, M-N - продольно-осевая линия стопы. Деформация полос обусловлена отклонением рельефа поверхности стопы от плоской поверхности. Первая и шестая полосы на чертеже не указаны, поскольку расположены за пределами стопы и не подвержены деформации.
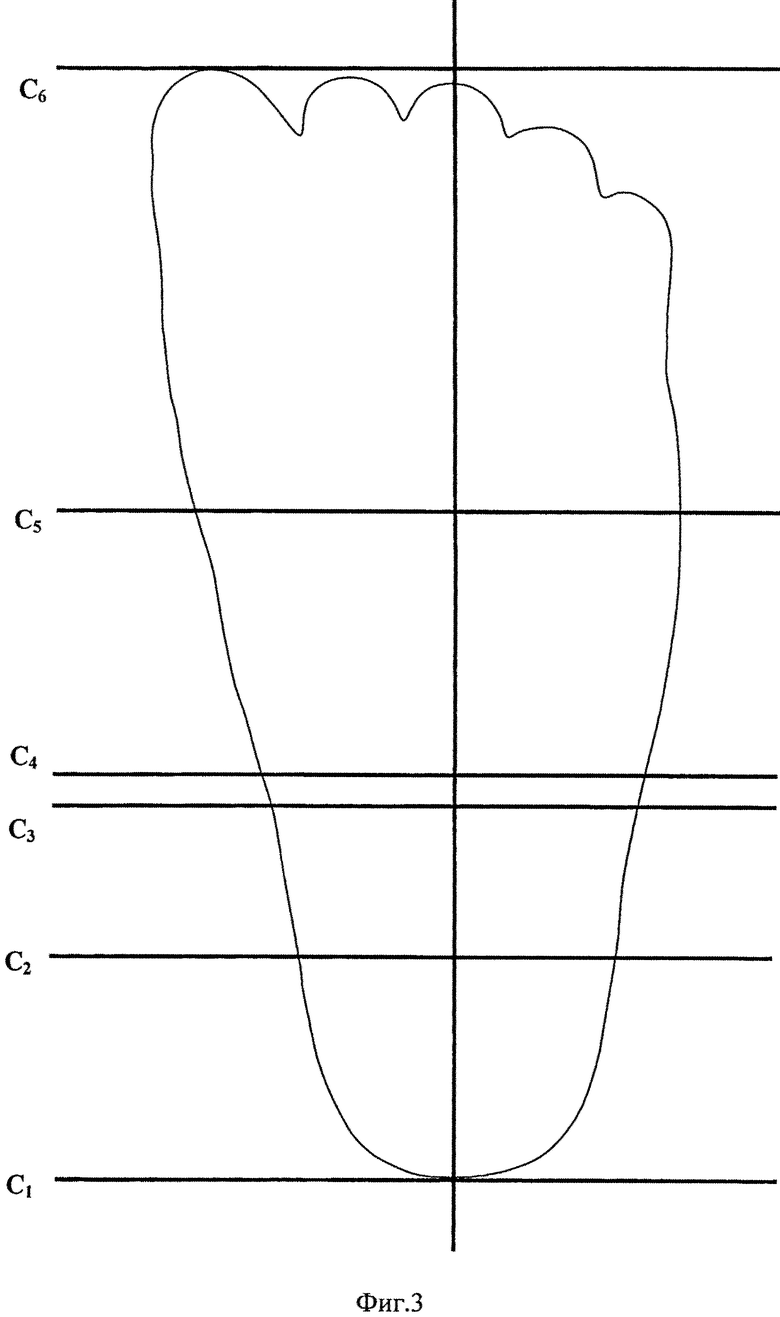
С целью количественной интерпретации этого отклонения необходимо сравнить деформированные полосы с недеформированными, получаемые на плоской поверхности. Это сравнение производится с использованием изображения полос, регистрируемого на плоской калибровочной поверхности (фиг.3).
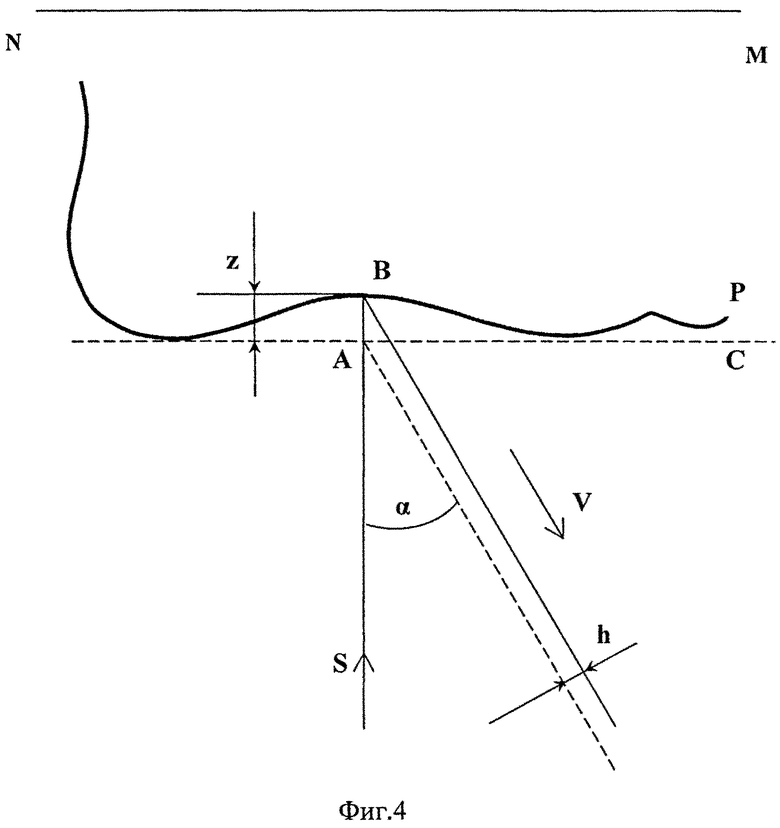
На фиг.4 представлена геометрия схемы проецирования полос и регистрации изображения с полосами, получаемыми на калибровочной поверхности и на поверхности стопы. Здесь M-N - ориентация продольно-осевой линии стопы; С - калибровочная поверхность; Р - поверхность стопы; S - вектор, характеризующий направление проецирования полос; V - вектор, характеризующий направление регистрации; α - угол, под которым производится регистрация изображения; А - положение какой-либо одной из шести полос на калибровочной поверхности; В - положение этой же полосы на поверхности стопы; Z - отклонение поверхности стопы от калибровочной поверхности; h - наблюдаемое смещение полосы.
Проецирование полос производится по нормали к опорной (калибровочной) поверхности. При этом для какой-либо выбранной полосы ее положение отмечено на схеме точкой А. Это положение регистрируется в памяти компьютера. При проецировании полос на поверхность стопы происходит смещение наблюдаемого положения выбранной полосы в точку В за счет отличия поверхности стопы от плоской калибровочной поверхности. Соотношение, связывающее реальное отклонение Z от регистрируемого h, определяется следующей формулой:
Z=h/sin α.
Величина угла α определяет чувствительность измерений: чем больше α, тем выше чувствительность.
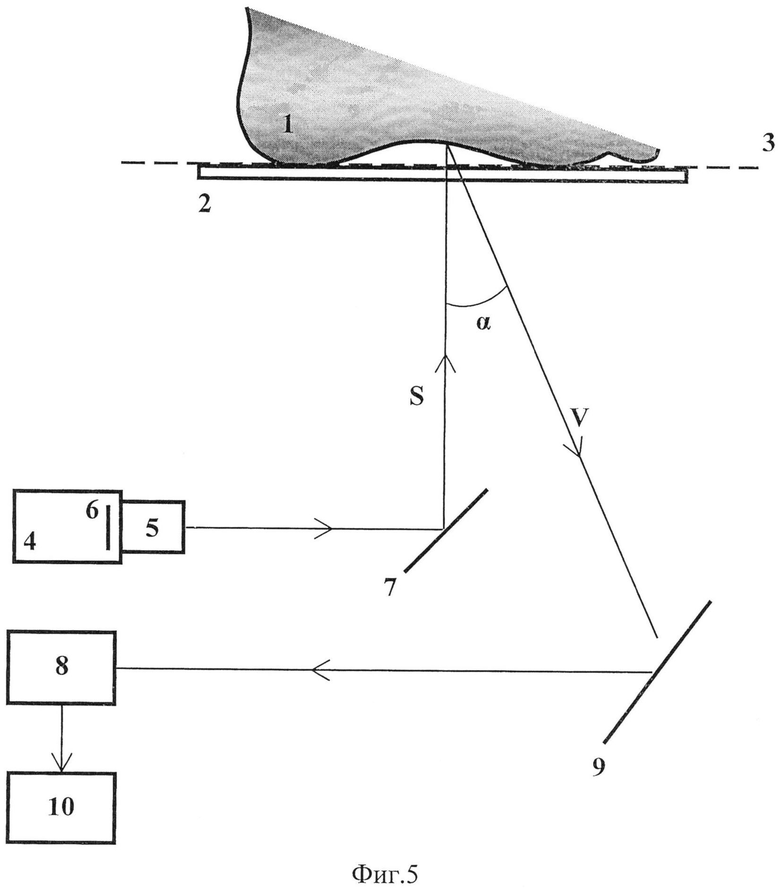
На фиг.5 представлена схема устройства, реализующего заявляемый способ.
Устройство содержит опорную пластину 2; калибровочную пластину 3; слайд-проектор 4 с панкратическим объективом 5; носитель изображения оптически контрастных полос 6; плоское поворотное зеркало 7 (установленное с возможностью поворота в плоскости чертежа); ПЗС-камеру 8; плоское поворотное зеркало 9 (установленное с возможностью поворота в плоскости чертежа и смещения в направлении, параллельном продольно-осевой линии стопы); компьютер 10.
Непосредственно на рабочей поверхности опорной пластины 2, размещенной горизонтально, устанавливается пациент 1, либо размещается калибровочная пластина 3. Опорная пластина может быть изготовлена из оптически прозрачного в видимом спектральном диапазоне светового излучения стекла и представляет собой плоскопараллельную пластину с полированными гранями. Калибровочная пластина 3 может представлять собой пластину с плоской рабочей поверхностью (с отклонением не более 0,01 мм) и иметь матовую хорошо отражающую рабочую поверхность.
Для формирования оптически контрастных полос можно использовать слайд-проектор 4 с панкратическим объективом 5. Носитель 6 изображения оптически контрастных полос, установленный в задней фокальной плоскости объектива 5 с возможностью вращения вокруг оптической оси, может быть изготовлен фотоспособом на фотопластинке. Как отмечалось выше, коэффициенты k12, k13, км, k15 определяются возрастной группой пациентов [Конструирование и технология ортопедической обуви: Учебное пособие для техникумов / И.К. Горелова, Е.Е. Аржанникова, Р.А. Иванов и др. Под ред. канд. мед. наук. Е.Е. Аржанниковой, старш. науч. сотр. И.К. Гореловой. - СПб, 1996. - с.104-107]. Для детей дошкольного и школьного возраста k12=0.20, k13=0.33, k14=0.36, k15=0.62; для взрослой группы пациентов k12=0.20, k13=0.34, k14=0.42, k15=0.62. Для каждой возрастной группы изготавливается и используется свой носитель изображения.
Регистрация изображения может осуществляться с помощью ПЗС-камеры 8 с матрицей не менее 2 Мпс. Выход ПЗС-камеры 8 подключен к компьютеру 10.
Способ реализуется следующим образом. Пациент становится на поверхность опорной пластины 2. При помощи слайд-проектора 4 изображение полос, записанное на носителе 6, проецируется с использованием поворотного зеркала 7 на подошвенную поверхность одной из стоп 1 пациента. С целью упрощения обеспечения прохождения продольно-осевой линии стопы M-N (фиг.1) через наиболее удаленную точку пяточного отдела стопы и наиболее удаленную точку среднего пальца на опорной поверхности удобно нанести каким-либо способом ориентировочную линию (например, начертить). При подготовке устройства к эксплуатации перед первым включением выполняется совмещение проецируемой продольно-осевой линии стопы с ориентировочной линией. При обследовании стопа пациента устанавливается таким образом, чтобы ориентировочная линия проходила через наиболее удаленную точку пяточного отдела стопы и наиболее удаленную точку среднего пальца.
После установки стопы пациента на опорную поверхность выполняется операция настройки полос: с помощью панкратического объектива 5 и поворотного зеркала 7 первая полоса совмещается с наиболее удаленной точкой пяточного отдела на продольно-осевой линии стопы, а шестая - с конечной точкой стопы. После настройки полос пациент 1-2 секунды сохраняет свое положение, в течение которых регистрируется отраженное в зеркале 9 изображение полос на поверхности стоп (фиг.2). Изображение регистрируется посредством камеры 4 и записывается в память компьютера.
После операции настройки полос и регистрации изображения полос на опорную пластину устанавливается калибровочная пластина 3, причем рабочие поверхности обеих пластин соприкасаются. Далее на калибровочную пластину проецируется система полос (настроенных). Изображение полос на калибровочной пластине (фиг.3) регистрируется и также записывается в память компьютера.
Изображение полос на калибровочной пластине имеет двойное назначение.
1. Получение калибровочных данных, учет которых в процессе анализа изображения полос на подошвенной поверхности стопы обеспечивает компенсацию погрешностей настройки оптической схемы и систематических погрешностей, связанных с проецированием системы оптически контрастных полос, что повышает точность определения формы стоп.
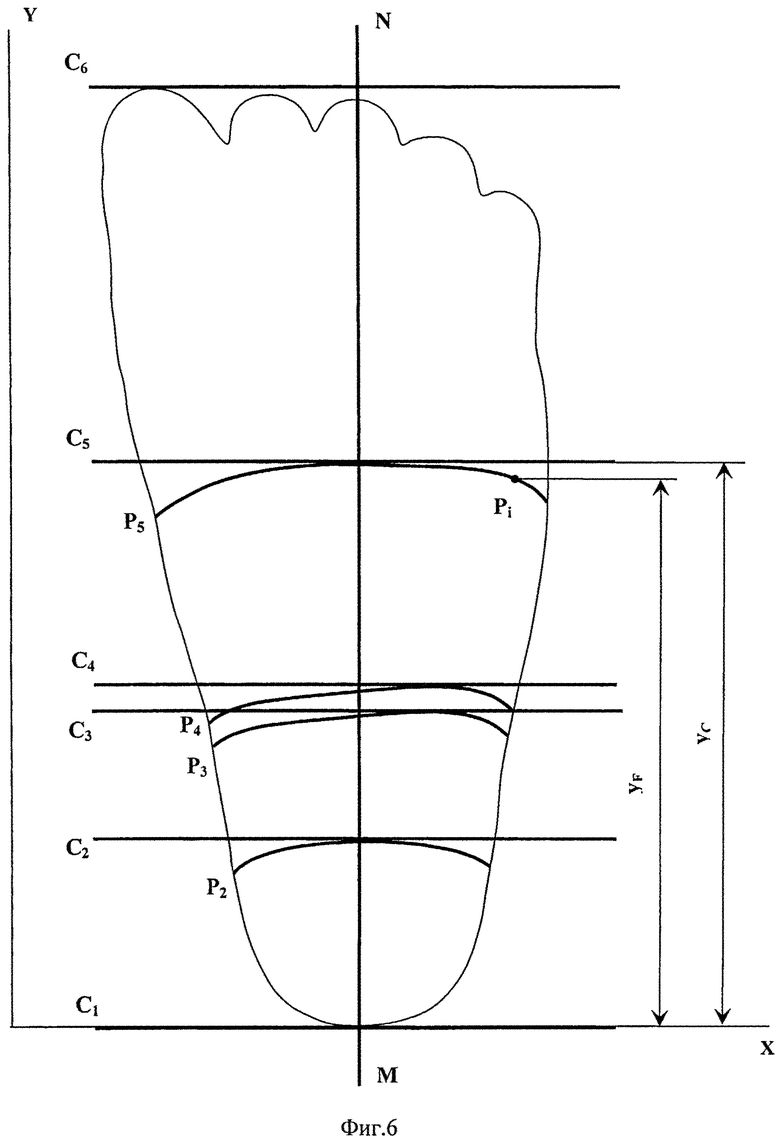
2. Положение прямых полос на плоской поверхности калибровочной пластины является отсчетным для количественной оценки формы поверхности стопы в выбранных сечениях. Использование, например, программы «Graph2Digit» дает возможность произвести оцифровку изображений полос. При этом разность ординат точек полосы на поверхности стопы и соответствующей полосы на калибровочной поверхности с помощью формулы (1) непосредственно дает количественное значение высоты рельефа поверхности стопы относительно опорной поверхности в анализируемой точке стопы. Данное утверждение проиллюстрировано на картине совмещенных изображений полос, зарегистрированных на поверхностях стопы (Р2-Р5) и калибровочной пластины (С2-С5, фиг.6). Так высота рельефа поверхности Zi, например, в точке Pi равна
Zi=(yC-yF)/sin α,
где yC, yF - ординаты точки Pi поверхности стопы для полос на стопе и калибровочной пластины соответственно.
Величина угла α определяет чувствительность измерений: чем больше α, тем выше чувствительность. Оптимальным является значение порядка 30°-45°. Установка требуемой величины угла осуществляется посредством зеркала 9: поворотом в плоскости чертежа и смещением в направлении, параллельном продольно-осевой линии стопы.
Таким образом, проецирование системы из шести оптически контрастных полос дает возможность непосредственно получить количественную информацию о высоте рельефа подошвенной поверхности обследуемой стопы в требуемых сечениях и тем самым упростить процесс определения формы поверхности стопы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ФОРМЫ СТОП И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2177249C2 |
| СПОСОБ СКРИНИНГОВОЙ ДИАГНОСТИКИ НАРУШЕНИЙ ОПОРНО-ДВИГАТЕЛЬНОЙ СИСТЕМЫ | 2013 |
|
RU2532281C1 |
| Способ и устройство для диагностики и коррекции опорной дисфункции | 2018 |
|
RU2705232C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ФОРМЫ И ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ТУЛОВИЩА ЧЕЛОВЕКА ВО ВРЕМЯ ХОДЬБЫ | 2002 |
|
RU2219836C1 |
| УСТРОЙСТВО ДЛЯ АНТРОПОМЕТРИЧЕСКИХ ИЗМЕРЕНИЙ | 2009 |
|
RU2436508C2 |
| СТЕЛЬКА ОРТОПЕДИЧЕСКАЯ МЯГКАЯ И СПОСОБ ЕЕ ИЗГОТОВЛЕНИЯ | 2013 |
|
RU2531724C1 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ СТОПЫ | 1992 |
|
RU2031617C1 |
| Способ бесконтактного измерения поверхности стопы | 1988 |
|
SU1673029A1 |
| ПРОТЕЗ СТОПЫ | 2001 |
|
RU2286749C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ФУНКЦИОНАЛЬНОГО СОСТОЯНИЯ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА | 2012 |
|
RU2523346C2 |
Изобретение относится к медицине, а именно к ортопедической диагностике, и может быть использовано при диагностическом обследовании пациентов. Изобретение может также найти применение в обувной промышленности при конструировании и изготовлении ортопедической обуви. На подошвенную поверхность стопы, расположенную на опорной пластине, и на калибровочную пластину с плоской матовой отражающей поверхностью проецируют под заданным углом пространственную систему оптически контрастных полос, состоящую из продольно-осевой линии стопы, проходящей через наиболее удаленную точку пяточного отдела стопы и наиболее удаленную точку среднего пальца, и шести параллельных полос, ориентированных перпендикулярно продольно-осевой линии стопы. При этом первая полоса совмещена с наиболее удаленной точкой пяточного отдела на продольно-осевой линии стопы, шестая полоса совмещена с конечной точкой стопы. Расстояния от первой полосы до второй, третьей, четвертой и пятой полос соответственно равны произведениям коэффициентов k12, k13, k14, k15 на D, где D - длина стопы, величины коэффициентов: для детей школьного и дошкольного возраста k12=0.20, k13=0.33, k14=0.36, k15=0.62; для взрослой группы пациентов k12=0.20, k13=0.34, k14=0.42, k15=0.62. Причем осевые лучи направления проецирования перпендикулярны к опорной пластине, а направление регистрации лежит в плоскости, проходящей через продольно-осевую линию стопы и перпендикуляр, восстановленный к опорной пластине. Способ позволяет получить количественную информацию о высоте рельефа подошвенной поверхности обследуемой стопы в требуемых сечениях и тем самым упростить процесс определения формы поверхности стопы за счет проецирования системы из шести оптически контрастных полос. 6 ил.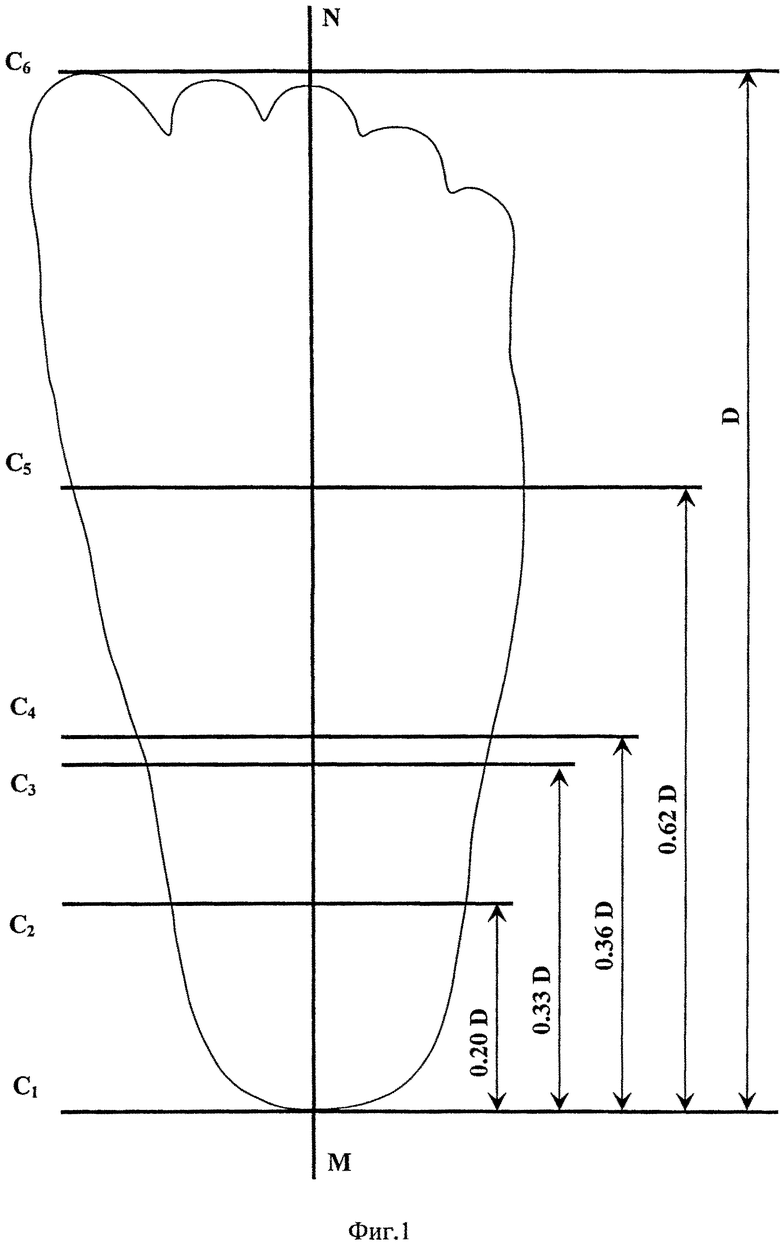
Способ определения формы стопы человека, включающий установку стопы на рабочую поверхность оптически прозрачной и горизонтально расположенной опорной пластины, проецирование на подошвенную поверхность стопы под заданным углом оптически контрастных полос, регистрацию отраженного изображения подошвенной поверхности стопы, размещение на рабочей поверхности опорной пластины калибровочной пластины с плоской матовой отражающей поверхностью, на которую также проецируют под заданным углом пространственную систему оптически контрастных полос, и регистрацию отраженного от калибровочной пластины изображения полос, по которому получают калибровочные значения в цифровом виде, при этом направление регистрации не совпадает с направлением проецирования, а по зарегистрированным изображениям полос на подошвенной поверхности стопы с учетом калибровочных значений получают количественные данные о форме подошвенной поверхности стопы, отличающийся тем, что проецированные оптически контрастные полосы состоят из продольно-осевой линии стопы, проходящей через наиболее удаленную точку пяточного отдела стопы и наиболее удаленную точку среднего пальца, и шести параллельных полос, ориентированных перпендикулярно продольно-осевой линии стопы, при этом первая полоса совмещена с наиболее удаленной точкой пяточного отдела на продольно-осевой линии стопы, шестая полоса совмещена с конечной точкой стопы, а расстояния от первой полосы до второй, третьей, четвертой и пятой полос соответственно равны произведениям коэффициентов k12, k13, k14, k15 на D, где D - длина стопы, величины коэффициентов определяются возрастной группой: для детей дошкольного и школьного возраста k12=0.20, k13=0.33, k14=0.36, k15=0.62; для взрослой группы пациентов k12=0.20, k13=0.34, k14=0.42, k15=0.62, причем осевые лучи направления проецирования перпендикулярны к опорной пластине, а направление регистрации лежит в плоскости, проходящей через продольно-осевую линию стопы и перпендикуляр, восстановленный к опорной пластине.
| СПОСОБ ОПРЕДЕЛЕНИЯ ФОРМЫ СТОП И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2177249C2 |
| СПОСОБ ДИАГНОСТИКИ СОСТОЯНИЯ ОТДЕЛОВ СТОПЫ | 2004 |
|
RU2253363C1 |
| WO 2006072778 A1, 13.07.2006 | |||
| ГЕРАСИМОВ С | |||
| Г | |||
| Новый способ и устройство для измерения поперечных размеров стопы во время ходьбы | |||
| Использование лечебной и диагностической техники в медицине, 1989, C | |||
| Машина для изготовления проволочных гвоздей | 1922 |
|
SU39A1 |
| ГОРЕЛОВА И.К | |||
| и др | |||
| Конструирование и технология ортопедической обуви: Учебное пособие для техникумов, СПб, 1996, С | |||
| Счетная таблица | 1919 |
|
SU104A1 |

