ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее изобретение относится к сбору данных векторных составляющих. В частности, изобретения относится к сбору данных с подвижного носителя.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
[0002] Системы электромагнитной (ЭМ) съемки обнаруживают электромагнитные поля, рассеиваемые от Земли, и широко используются для картирования электрических свойств, главным образом изменений проводимости, а также чувствительности к поляризуемости, диэлектрической проницаемости и магнитной проницаемости. Некоторые электрические свойства могут быть связаны с различными геологическими объектами, поэтому данные электромагнитной съемки могут использоваться для определения наличия или вероятности залегания различных сырьевых материалов, например, нефти, минералов и грунтовых вод.
[0003] Система электромагнитной съемки, как правило, реагирует на наличие квазистатического, изменяющегося во времени электрического тока в земле. Электрические свойства Земли могут быть определены путем измерения изменения во времени магнитного поля, создаваемого этим током, с помощью датчика магнитного поля. Изменяющиеся во времени поля могут создаваться локальной передающей антенной в случае управляемого источника или окружающими геомагнитными полями в случае систем с естественным источником.
[0004] Подвижная система электромагнитной съемки может использовать подвижный носитель для транспортировки и удержания датчика магнитного поля при сборе данных. В подвижной системе электромагнитной съемки носитель может содержать буксируемый датчик (или зонд), который может быть подвешен под летательным аппаратом на буксировочном тросе. Популярные разновидности систем аэроэлектромагнитной (АЭМ) съемки буксируют датчик под вертолетом, как правило, на буксировочном тросе, длина которого варьируется в диапазоне от 30 до 90 метров. АЭМ-съемка обычно покрывает площадь с использованием параллельных маршрутов полета, разнесенных на фиксированный интервал бокового эшелонирования.
[0005] Для обнаружения наличия глубинных геологических объектов предпочтителен сбор низкочастотных ЭМ-данных. В настоящее время АЭМ-системы обычно ограничиваются сбором данных на частоте 20-25 Гц и выше. Сбор данных в диапазоне ниже 25 Гц позволил бы обнаруживать геологические объекты, которые не могут быть обнаружены с помощью существующих АЭМ-систем. В полосе частот ниже 25 Гц напряженность магнитного поля из-за изменений проводимости, обнаруживаемая ЭМ-системами в общем пропорциональна частоте. При снижении частоты сбора данных электромагнитной системы магнитные поля, рассеиваемые из-за этих изменений проводимости, становятся слабее. Для обнаружения изменений проводимости из-за глубинных структур Земли может потребоваться чувствительность магнитного поля порядка пикоТеслы.
[0006] Системы электромагнитной съемки, как правило, обнаруживают ЭМ-поля с помощью датчиков векторных составляющих. Для измерения электромагнитного поля может быть использовано множество видов магнитных (ЭМ) датчиков векторных составляющих, в том числе поисковые катушки, катушки обратной связи, сверхпроводящие магнитометры, волоконно-оптические и феррозондовые магнитометры. В случае обнаружения магнитного поля с помощью катушки в соответствии с законом Фарадея выходной сигнал ЭМЧ от катушки ослабевает пропорционально уменьшению частоты, поэтому для компенсации снижения чувствительности на низких частотах могут потребоваться более мощные катушки. Электромагнитные датчики могут быть «связаны по постоянному току», обладая чувствительностью к установившемуся полю, или «связаны по переменному току», не обладая чувствительностью к установившемуся полю.
[0007] Системы ЭМ-съемки отличаются от систем магнитной съемки, которые измеряют статическое магнитное поле Земли. Последнее, как правило, связано с измерением изменений статического магнитного поля Земли, которые обычно обусловлены изменениями магнитной проницаемости. Изменяющееся во времени поле может быть на порядок меньше статического поля, часто в миллионы раз. В связи с этим для высококачественного электромагнитного измерения необходимо ограничить вращательное движение ЭМ-датчика векторных составляющих в статическом магнитном поле в течение всего измерения. При сборе низкочастотных электромагнитных данных продолжительность ограничения этого вращательного движения увеличивается. На низких частотах вращательная устойчивость ЭМ-датчика векторных составляющих часто приобретает решающее значение. Шум в электромагнитном измерении, обусловленный вращением магнитного датчика векторных составляющих в фоновом статическом магнитном поле Земли, может называться шумом движения.
[0008] Статическое магнитное поле Земли имеет величину порядка 50 000 000 пТл. Для ограничения шума движения до 1 пТл может быть необходимо ограничить вращательное изменение до порядка 1/50 000 000 радиан в течение всего измерения. Для ограничения шума движения до 10 пТл может быть необходимо ограничить вращательное изменение до порядка 1/5 000 000 радиан. Поле может считаться по существу статическим, если оно изменяется на частоте ниже полосы частот сбора данных, используемой для измерения обнаруженных векторных полевых данных.
[0009] Шум вращательного движения может быть вычислен по следующим уравнениям шума движения. Для катушечного датчика векторных составляющих, указывающего в направлении, описанном единичным вектором m, шум Nc вращения может быть записан в следующем виде:
Nc=m⋅(ω×B),
[0010] где ω - угловая скорость катушечного датчика относительно статического поля B Земли. Эта зависимость описана в патенте WO2013/170340A1 на имя Dodds. Для векторного магнитометра с дипольным моментом m шум Nm вращения может быть записан в следующем виде:
Nm=m⋅(ΔΘ×B),
[0011] где ΔΘ - угловое изменение ориентации магнитометра относительно статического магнитного поля Земли во время измерения.
[0012] Для удобства угловое изменение ориентации или угловая скорость могут называться «угловым движением», а получаемый сигнал из-за углового движения датчика векторных составляющих в присутствии фонового поля Земли называется «шумом движения». Шум движения может быть аналогично определен для других полей в дополнение к магнитному полю, и аналогичные уравнения шума движения могут применяться в отношении датчиков векторных составляющих, которые зондируют небольшие изменяющиеся во времени поля в присутствии сравнительно большого фонового поля, в котором движется датчик. Шум движения может возникать при наложении фонового векторного поля на меньшее изменяющееся во времени векторное поле, которое является объектом измерения, когда оба векторных поля зондируются обычным датчиком векторных составляющих, установленным на подвижной платформе, подверженной угловому движению, и когда ось обнаружения датчика задается ориентацией инструментальной платформы, на которой он установлен. Тогда, как правило, шум N движения из-за углового движения A датчика векторных составляющих в фоновом поле F может быть записан в следующем виде:
N=m⋅(A×F).
[0013] Шум движения отличается от эффектов ошибки наведения. Эффекты ошибки наведения, как правило, возникают при обнаружении излучающих полей от источника в определенном направлении через апертуру, которая наведена на него. Апертура обычно выбирает сигнал из конкретного местоположения и повышает мощность сигнала от источника по сравнению с фоновым полем в той же полосе частот. В случае шума движения датчик, как правило, нечувствителен к направлению источника, и апертуры, как правило, бесполезны.
[0014] Шум движения может возникать, например, при измерении квазистатических или потенциальных полей или их градиентов датчиком векторных составляющих. В этих случаях шум движения нечувствителен к направлению источника. В квазистатических ЭМ и гравиметрических измерениях для обнаружения сигнала от источника в присутствии гораздо большего статического или по существу статического фонового поля может использоваться векторный датчик. Именно угловое движение датчика векторных составляющих в фоновом поле вызывает чувствительность векторного измерения к фоновому полю, и именно оно является источником шума движения. Таким образом, шум движения отличается от ошибки наведения, которая чувствительна к направлению источника.
[0015] Решения, связанные с эффектами ошибки наведения, обычно отличаются от решений, связанных с эффектами шума движения. Ошибка наведения, как правило, связана со сбором данных сфокусированных излучающих полей в полосах частот, отличающихся и отделимых от движения инструментальной платформы, в присутствии или отсутствии существенного фонового поля. Решения, относящиеся к шуму движения, связаны со сбором данных полей векторных составляющих, которые перекрывают полосу частот, в которой движется инструмент, и в этом случае обязательно присутствует фоновое поле. Таким образом, ошибка наведения связана с поддержанием направления в течение сбора данных и может присутствовать в скалярных (амплитудных) измерениях. Шум движения связан с ограничением углового движения в полосе частот сбора данных требуемого векторного измерения и по определению не может присутствовать при выполнении скалярных (амплитудных) измерений.
[0016] Проблема управления шумом движения не является уникальной для аэроэлектромагнитных систем и также возникает в области аэрогравиметрических измерений. Как и в случае аэроэлектромагнитных измерений, очень малые, изменяющиеся во времени изменения зондируемого векторного поля могут измеряться в присутствии гораздо большего по существу статического фонового поля. В гравитационном поле небольшие изменяющиеся во времени изменения подвержены гравитационному ускорению, обусловленному изменениями плотности земной коры, которые измеряются при перемещении гравиметрической системы с места на место. Подобным образом, шум движения может присутствовать в градиентометрическом измерении в присутствии фонового градиентного поля.
[0017] Другие конструкции вращательно изолированных инструментальных платформ, например, обычно используемые в областях применения камер, инерциальных систем или гравитационных градиентометров, не учитывают рабочие требования системы электромагнитного зондирования и не подходят для сбора электромагнитных данных высокого разрешения. Требования к электромагнитным измерениям могут включать в себя среду с низким электромагнитным шумом. В ЭМ-системах сбора данных предпочтительны высокорезистивные компоненты с низкой магнитной проницаемостью и исключительно низким вибрационным шумом.
[0018] Публикация заявки на патент США № 2011/0175604 (на имя Polzer и др.), которая включена в настоящий документ путем ссылки, описывает способ сбора низкочастотных ЭМ-данных с подвижного носителя. Этот документ описывает ЭМ-датчики на уравновешенной по центру инструментальной платформе, поддерживаемой на сферической воздушной опоре.
[0019] Публикация международной заявки на патент по PCT № WO 2015/103608 A1 (на имя Meyer и др.) под названием «Gravity Gradiometer System with Spherical Air Bearing Based Platform», которая включена в настоящий документ путем ссылки, описывает уравновешенную по центру инструментальную платформу, установленную на воздушной опоре. Этот документ описывает дополнение уравновешенной по центру инструментальной платформы исполнительными механизмами и пружинами для управления диапазоном движения платформы. Однако, хотя эти устройства стабилизации ориентации могут иметь преимущество, заключающееся в ограничении диапазона движения, они могут представлять собой векторы, по которым шум движения может передаваться от носителя на датчики, установленные на инструментальной платформе.
[0020] Такие традиционные устройства стабилизации ориентации могут служить источником вибрационного шума или крутящего момента, что может снижать качество данных. Шум движения, обусловленный такими системами стабилизации ориентации, может снижать качество высокоточного электромагнитного измерения, кроме того, его сложно спрогнозировать и устранить. Таким образом, стабилизация ориентации может свести на нет кинематические преимущества, достигаемые уравновешиванием по центру инструментальной платформы.
[0021] Таким образом, необходимы улучшенные способы и системы сбора геофизических данных векторных составляющих с низким уровнем шума в широкой полосе пропускания и, в частности, данных векторных составляющих магнитного поля («данных ЭМ-съемки») с подвижного носителя, в частности, в полосе частот ниже 25 Гц.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0022] Настоящее изобретение обеспечивает способы и устройства сбора данных электромагнитной съемки с подвижного носителя. Некоторые варианты выполнения, раскрытые в настоящем документе, могут обеспечивать сбор данных электромагнитной съемки с низким уровнем шума движения. Устройство, раскрытое в настоящем документе, может использоваться на мобильных или стационарных носителях для сбора ЭМ-данных в воздухе, на земле, а также в море или под водой. Стационарные носители могут перемещаться из-за вибраций. Варианты выполнения не ограничиваются только сбором данных электромагнитной съемки. Способы и устройства, описанные в настоящем документе, также подходят для реализации в других областях применения, где необходимо уменьшение углового движение или шума движения в полевых датчиках векторных составляющих.
[0023] Некоторые аспекты настоящего изобретения обеспечивают сбор электромагнитных данных с низким уровнем шума движения путем установки одного или более ЭМ-датчиков векторных составляющих на утяжеленной в нижней части инструментальной платформе. Инструментальная платформа может балансировать на сферической опоре, которая поддерживает ее вес. Таким образом, инструментальная платформа может быть по существу не связана с движениями носителя в пределах полосы пропускания.
[0024] В соответствии с одним аспектом обеспечено устройство сбора данных векторных составляющих, содержащее: узел основания; сферическую опору, установленную на узле основания; инструментальную платформу, имеющую по меньшей мере один датчик векторных составляющих, прикрепленный к ней, причем инструментальная платформа установлена на сферической опоре и поддерживается ей, в результате чего сферическая опора соединяет инструментальную платформу с узлом основания и позволяет свободное угловое вращение инструментальной платформы в пределах диапазона угла наклона вокруг сферической опоры, так что инструментальная платформа имеет центр вращения; причем инструментальная платформа имеет центр масс, расположенный под центром вращения.
[0025] В некоторых вариантах выполнения инструментальная платформа выполнена с возможностью маятникового движения вокруг центра вращения, так что шум движения в пределах полосы частот сбора данных по меньшей мере одного датчика векторных составляющих подавляется.
[0026] В некоторых вариантах выполнения инструментальная платформа имеет собственную частоту маятникового движения, которая ниже наименьшей частоты полосы частот сбора данных по меньшей мере одного датчика векторных составляющих.
[0027] В некоторых вариантах выполнения инструментальная платформа является жесткой.
[0028] В некоторых вариантах выполнения устройство дополнительно содержит носитель, причем узел основания соединен с носителем.
[0029] В некоторых вариантах выполнения носитель содержит буксировочную раму и соединительный механизм, соединяющий узел основания с буксировочной рамой.
[0030] В некоторых вариантах выполнения носитель представляет собой воздушный носитель, выполненный с возможностью буксировки воздушным транспортным средством.
[0031] В некоторых вариантах выполнения сферическая опора представляет собой воздушную опору.
[0032] В некоторых вариантах выполнения сферическая опора содержит единственное механическое соединение между узлом основания и инструментальной платформой.
[0033] В некоторых вариантах выполнения по меньшей мере один датчик векторных составляющих содержит три независимо ориентированных датчика векторных составляющих.
[0034] В некоторых вариантах выполнения устройство дополнительно содержит контроллер, причем контроллер содержит процессор и память, причем контроллер принимает данные от указанного по меньшей мере одного датчика.
[0035] В некоторых вариантах выполнения контроллер сохраняет принятые данные.
[0036] В некоторых вариантах выполнения устройство дополнительно содержит средство беспроводной связи, причем контроллер побуждает средство беспроводной связи к передаче принятых данных для сохранения в базе данных.
[0037] В некоторых вариантах выполнения узел основания содержит опорную стойку, причем сферическая опора установлена но опорной стойке.
[0038] В некоторых вариантах выполнения опорная стойка содержит столб, продолжающийся вверх от узла основания.
[0039] В некоторых вариантах выполнения по меньшей мере один датчик векторных составляющих содержит по меньшей мере одно из следующего: по меньшей мере один электромагнитный датчик; по меньшей мере один гравиметрический датчик.
[0040] В некоторых вариантах выполнения по меньшей мере один датчик векторных составляющих содержит по меньшей мере один градиентометрический датчик.
[0041] В некоторых вариантах выполнения инструментальная платформа содержит обращенную вниз юбку, причем обращенная вниз юбка обеспечивает зазор вокруг сферической опоры и узла основания, обеспечивающий диапазон наклонного вращения инструментальной платформы в пределах диапазона угла наклона.
[0042] В некоторых вариантах выполнения устройство дополнительно содержит: систему выравнивания; и систему измерения углового движения, причем система выравнивания в зависимости от углового движения, измеренного системой измерения углового движения, подает выравнивающие крутящие моменты на инструментальную платформу, вызывая ее вращение вокруг сферической опоры.
[0043] В некоторых вариантах выполнения система выравнивания содержит одно из следующего: множество движителей, расположенных на инструментальной платформе, причем движители создают указанные выравнивающие крутящие моменты; и множество узлов подвижных масс, расположенных на инструментальной платформе, причем узлы подвижных масс создают указанные выравнивающие крутящие моменты.
[0044] В некоторых вариантах выполнения выравнивающие крутящие моменты создаются для по меньшей мере одного из следующего: ориентация утяжеленной в нижней части инструментальной платформы так, чтобы ее главная ось была расположена по существу вертикально; и уменьшение угловой скорости.
[0045] В некоторых вариантах выполнения устройство дополнительно содержит акселерометр, расположенный на инструментальной платформе, причем акселерометр измеряет данные об ускорении, и контроллер выполнен с возможностью: приема данных об ускорении; оценки шума биения в зависимости от данных об ускорении; и удаления шума биения из данных, полученных от по меньшей мере одного датчика векторных составляющих.
[0046] В соответствии с другим аспектом обеспечен способ сбора данных векторных составляющих с подвижной инструментальной платформы, имеющей по меньшей мере один датчик векторных составляющих, прикрепленный к ней, причем способ содержит этапы, на которых: перемещают устройство, содержащее: узел основания; сферическую опору, установленную на узле основания; и инструментальную платформу, причем инструментальная платформа установлена на сферической опоре и поддерживается ей, в результате чего сферическая опора соединяет инструментальную платформу с узлом основания и позволяет свободное угловое вращение инструментальной платформы в пределах диапазона угла наклона вокруг сферической опоры, так что инструментальная платформа имеет центр вращения, причем инструментальная платформа имеет центр масс, расположенный под центром вращения; и во время перемещения устройства собирают данные векторных составляющих с использованием по меньшей мере одного датчика векторных составляющих.
[0047] В некоторых вариантах выполнения устройство дополнительно содержит носитель, причем узел основания соединен с носителем, и перемещение устройства содержит буксировку носителя.
[0048] В некоторых вариантах выполнения инструментальная платформа выполнена с возможностью маятникового движения вокруг центра вращения, так что шум движения в пределах полосы частот сбора данных по меньшей мере одного датчика векторных составляющих подавляется.
[0049] Другие аспекты и признаки настоящего изобретения станут очевидными специалисту в данной области техники при изучении следующего далее описания конкретных вариантов выполнения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0050] Аспекты и варианты выполнения изобретения будут описаны более подробно ниже со ссылкой на сопровождающие чертежи, на которых:
[0051] Фигура 1A представляет собой вид в перспективе устройства сбора данных в соответствии с некоторыми вариантами выполнения, причем оболочка носителя показана в частичном разрезе;
[0052] Фигура 1B представляет собой вид спереди в разрезе устройства, показанного на Фигуре 1A;
[0053] Фигура 1C представляет собой частично разобранный вид в разрезе инструментальной платформы, сферической опоры и узла основания устройства, показанного на Фигурах 1A и 1B;
[0054] Фигура 1D представляет собой вид в перспективе устройства, показанного на Фигурах 1A и 1B;
[0055] Фигура 2 представляет собой структурную схему компонентов устройства в соответствии с некоторыми вариантами выполнения;
[0056] Фигура 3 представляет собой схематическую иллюстрацию утяжеленной в нижней части инструментальной платформы в соответствии с некоторыми вариантами выполнения;
[0057] Фигура 4A представляет собой график, иллюстрирующий возникновение шума биения;
[0058] Фигура 4B представляет собой график, иллюстрирующий влияние шума биения на измерение;
[0059] Фигуры 5A-5D иллюстрируют различные примерные конфигурации сферической опоры в соответствии с некоторыми вариантами выполнения;
[0060] Фигура 6A представляет собой вид в перспективе примерной системы выравнивания в соответствии с некоторыми вариантами выполнения;
[0061] Фигура 6B представляет собой вид в перспективе другой примерной системы выравнивания в соответствии с некоторыми вариантами выполнения;
[0062] Фигура 7 представляет собой схематический вид сбоку в разрезе устройства сбора данных в соответствии с некоторыми вариантами выполнения;
[0063] Фигура 8 представляет собой вид сбоку в частичном разрезе примерной инструментальной платформы, установленной на столбе через сферическую опору, в соответствии с другим вариантом выполнения;
[0064] Фигура 9 представляет собой вид сбоку инструментальной платформы и столба, показанных на Фигуре 8;
[0065] Фигура 10 представляет собой разобранный вид в перспективе сферической опоры и столба, показанных на Фигуре 8;
[0066] Фигура 11 представляет собой график, иллюстрирующий шум движения и геомагнитный спектр в зависимости от частоты для одного примерного варианта выполнения;
[0067] Фигура 12 представляет собой структурную схему системы датчиков и контроллеров в соответствии с некоторыми вариантами выполнения;
[0068] Фигура 13 представляет собой блок-схему способа сбора данных с подвижной инструментальной платформы, имеющей по меньшей мере один датчик векторных составляющих, прикрепленный к ней, в соответствии с некоторыми вариантами выполнения; и
[0069] Фигура 14 представляет собой блок-схему примерного способа корректировки шума биения в соответствии с некоторыми вариантами выполнения.
ПОДРОБНОЕ ОПИСАНИЕ
[0070] Для управления шумом движения необходимо изолировать угловое движение датчика от угловых движений и вибраций носителя. В традиционных аэроэлектромагнитных системах с этой целью обычно используются тросовые подвесы. Однако, как правило, они не способны обеспечить высокую степень устойчивости, необходимую для снижения шума движения, до приемлемых уровней на частотах ниже 20-25 Гц. Способы и системы, раскрытые в настоящем документе, особенно подходят для аэроэлектромагнитной съемки в диапазоне 1-25 Гц.
[0071] В соответствии с различными вариантами выполнения настоящего изобретения раскрыто устройство электромагнитной съемки для сбора электромагнитных данных, которое может обеспечивать снижение шума движения. Устройство, раскрытое в настоящем документе, может буксироваться или иным образом перемещаться транспортным средством для сбора данных геофизической съемки. Конкретные варианты выполнения, описанные в настоящем документе, относятся к воздушным устройствам, которые могут буксироваться воздушным транспортным средством. Однако следует понимать, что варианты выполнения изобретения не ограничиваются подвижными носителями для использования в воздушной среде. Концепции, рассмотренные в настоящем документе, могут применяться в других средах, в которых требуется снижение шума движения. Например, транспортное средство, перемещающее устройство, может представлять собой легковой автомобиль, грузовой автомобиль, поезд, лодку и т.д. В других областях применения устройство активно не перемещается транспортным средством и может быть по существу стационарным.
[0072] В соответствии с некоторыми аспектами обеспечено устройство, которое включает в себя узел основания, поддерживающий сферическую опору, которая, в свою очередь, поддерживает инструментальную платформу. Инструментальная платформа утяжелена в нижней части и поддерживает датчик векторных составляющих. Другими словами, центр масс инструментальной платформы для по меньшей мере одного датчика векторных составляющих находится под центром вращения, обеспеченным сферической опорой. За счет такого расположения инструментальная платформа может совершать маятниковое движение относительно сферической опоры. Это маятниковое движение может иметь частоту ниже наименьшей частоты полосы частот сбора данных по меньшей мере одного ЭМ-датчика или по меньшей мере ниже части полосы частот сбора данных. Если маятниковое движение имеет частоту ниже по меньшей мере части полосы частот сбора данных, шум движения может по меньшей мере частично подавляться или ослабляться в этой полосе частот. За счет надлежащего выбора инерционных параметров инструментальной платформы шум движения может быть существенно снижен в полосе частот сбора данных датчиков.
[0073] В некоторых вариантах выполнения собственная частота маятникового движения инструментальной платформы может иметь период более 1 секунды и менее 1000 секунд. Аэроэлектромагнитная съемка может включать в себя это устройство, имеющее утяжеленную в нижней части инструментальную платформу и узел основания, поддерживаемый буксировочной рамой внутри корпуса. Однако, как отмечено выше, устройство также может быть выполнено с возможностью использования в системах сбора данных, не связанных с воздушной средой.
[0074] Фигура 1A представляет собой вид в перспективе устройства 100 сбора АЭМ-данных в соответствии с некоторыми вариантами выполнения. Примерное устройство 100 выполнено с возможностью сбора данных с воздуха, хотя варианты выполнения не ограничиваются воздушными системами. Примерное устройство 100 включает в себя: носитель 101, содержащий оболочку 102 носителя и буксировочную раму 104, установленную внутри оболочки 102 носителя; узел 106 основания, соединенный с буксировочной рамой 104 с помощью соединительного механизма 105 (в этом примере содержащего систему 123 тросовых демпферов, показанную более подробно на Фигуре 1B); сферическую опору 110 (показанную на Фигуре 1B) на узле основания; и инструментальную платформу 108, установленную на сферической опоре 110. В данном примере к инструментальной платформе 108 прикреплены ЭМ-датчики 146 векторных составляющих.
[0075] В некоторых вариантах выполнения носитель 101 включает в себя оболочку 102 носителя и буксировочную раму 104, а соединительный механизм 105 исключен. В других вариантах выполнения устройство может содержать узел основания и инструментальную платформу, соединенную с узлом основания сферической опорой. Устройство может использоваться с другим носителем или может использоваться самостоятельно. Например, устройство может буксироваться на прицепе. В других вариантах выполнения устройство может быть установлено или подвешено на самом транспортном средстве. В других вариантах выполнения устройство может быть установлено в по существу стационарном положении (например, на платформе или здании), которое все же подвержено небольшому и/или медленному движению с течением времени.
[0076] Носитель 101, показанный на Фигуре 1A, представляет собой подвижный носитель, который выполнен с возможностью буксировки самолетом или другим воздушным транспортным средством. Выражение «подвижный носитель» в настоящем документе не означает, что носитель всегда подвижен, а скорее означает, что носитель может быть выполнен с возможностью сбора данных в движении. Например, в других вариантах выполнения могут быть использованы другие подвижные носители, например, прицепы, буксируемые платформы или другие средства соединения носителя с транспортным средством.
[0077] Варианты выполнения не ограничиваются устройством, которое активно перемещается транспортным средством. В некоторых случаях естественные перемещения земной поверхности, конструкции или здания могут вызывать шум движения в полосе частот сбора данных, даже если устройство по существу неподвижно. В таких случаях утяжеленная в нижней части инструментальная платформа на сферической опоре может снижать такой шум движения.
[0078] При использовании в воздушной среде оболочка 102 носителя (или оболочка гондолы) может иметь в общем каплевидную форму со скругленным передним концом 114 в форме луковицы и сужающимся хвостом 116, как проиллюстрировано. Оболочка 102 носителя может быть устойчива к погодным условиям. Каплевидная форма подходит для воздушного зондирования, хотя могут быть использованы другие формы. На фигуре оболочка 102 носителя частично удалена для демонстрации буксировочной рамы 104, узла 106 основания и инструментальной платформы 108. Кили 151 вблизи хвостового конца 116 могут обеспечивать некоторую стабильность в полете. Оболочка 102 носителя обеспечена в качестве примера, и следует понимать, что для воздушных носителей могут быть использованы оболочки других форм и конструкций. В случае использования носителя варианты выполнения не ограничиваются конкретной формой оболочки 102 носителя.
[0079] Буксировочная рама 104, показанная на Фигуре 1A, включает в себя основное опорное кольцо 118 и верхнее опорное кольцо 120. От основного опорного кольца в противоположных направлениях продолжаются разделенные буксировочные оси 122a (Фигура 1B) и 122b, которые выходят наружу через оболочку 102 носителя. К осям 122a и 122b устройства 100 и к воздушному транспортному средству (не показано) может быть прикреплен трос 103 (показан на Фигуре 1B). Верхнее опорное кольцо 120 может, например, иметь диаметр, составляющий приблизительно половину диаметра основного опорного кольца 118. В этом примере верхнее опорное кольцо 120 смещено вверх от основного опорного кольца 118 на расстояние, приблизительно равное его диаметру. Верхнее и основное опорные кольца 120 и 118 соединены в общем полусферической несущей оболочкой 119. Оси 122a и 122b поворотно соединены с оболочкой 102 носителя, и буксировочная рама 104 имеет размер и форму, обеспечивающие возможность относительного вращения буксировочной рамы 104 в носителе вокруг горизонтальной оси 121, которая проходит через разделенные буксировочные оси. Буксировочная рама 104 обеспечена в качестве примера, и следует понимать, что для соединения узла основания (например, узла 106 основания) с носителем (например, носителем 101) могут быть использованы другие конструкции. Например, в другом варианте выполнения узел основания может быть подвешен на одном или нескольких тросах от анкера или кронштейна, расположенного в верхней части оболочки носителя или вблизи нее. В других вариантах выполнения узел 106 основания может быть непосредственно соединен с осями 122a и 122b. Варианты выполнения не ограничиваются примерной конструкцией буксировочной рамы 104.
[0080] Хотя это не показано на Фигуре 1A, в этом примерном варианте выполнения система 123 тросовых демпферов (показана на Фигуре 1B) образует соединительный механизм 105 между узлом 106 основания и буксировочной рамой 104. Конструкция буксировочной рамы 104 показана в качестве примера, и в других вариантах выполнения могут быть использованы буксировочные рамы или узлы других конструкций. Например, другие подходящие конструкции буксировочной рамы раскрыты в публикациях заявок на патенты США № 2015/0034795 и 2011/0175604 на имя Polzer и др., которые включены в настоящий документ путем ссылки.
[0081] В этом примере узел 106 основания содержит верхний кольцеобразный обод 126 и нижнее основание 128 с разнесенными друг от друга ребрами 130, проходящими между ними. Ребра 130 соединяют основание 128 и верхний обод 126. Каждое ребро 130 прикреплено к верхнему ободу 126. Ребра 130 продолжаются вниз сначала наружу, а затем загибаются внутрь, пересекаясь с основанием 128. В этом примере вокруг верхнего обода 126 равномерно разнесено шесть ребер 130. Таким образом, смежные ребра 130 расположены под углом приблизительно 60 градусов относительно друг друга. В других вариантах выполнения может использоваться другая конструкция узла основания, и может быть обеспечено большее или меньшее количество ребер.
[0082] Фигура 1B представляет собой вид спереди в разрезе устройства 100, показанного на Фигуре 1A. В этом примере соединительный механизм 105 между буксировочной рамой 104 и узлом 106 основания представляет собой систему 123 тросовых демпферов, но это лишь один из возможных вариантов. Однако, следует понимать, что также могут быть использованы другие конструкции соединительного механизма. Смотри, например, виброизолирующую демпферную систему, описанную в публикации патента США № 2011/0175604 на имя Polzer и др., которая включена в настоящий документ путем ссылки.
[0083] Система 123 тросовых демпферов содержит множество пневматических тросовых демпферов 132a и 132b, по одному для каждого ребра 130. Каждый тросовый демпфер 132a и 132b прикреплен к внутренней части буксировочной рамы 104 и выровнен с соответствующим ребром 130 узла 106 основания. В этом примере обеспечено шесть тросовых демпферов 132a и 132b (по одному для каждого ребра 130). Каждый тросовый демпфер 132a и 132b выполнен в виде пневматического цилиндра на аэростатической опоре, как раскрыто в публикации заявки на патент США № 2015/0034795 на имя Polzer и др. Каждый тросовый демпфер 132a и 132b содержит пару пневматических поршней (не показаны), поддерживаемых в кассете 134a или 134b. В этом примере концы пневматических поршней заканчиваются на общем поперечном элементе (не показан). Каждый тросовый демпфер 132a и 132b дополнительно включает в себя соответствующий шкив 136a или 136b и трос 138a или 138b. Каждый трос 138a и 138b прикреплен к соответствующей кассете 134a или 134b и накинут на соответствующий шкив 136a или 136b для удержания веса узла 106 основания. Каждый трос 138a и 138b заканчивается на соответствующем креплении 140 на конце 142 соответствующего ребра 130.
[0084] В этом примере три тросовых демпфера 132a обеспечены тросом 138a, продолжающимся от нижнего конца 143 кассеты 134a, так что трос 138a продолжается в частично поперечном направлении до соответствующего ребра 130. Три других тросовых демпфера 132b обеспечены тросом 138b, продолжающимся от верхнего конца 145 кассеты 134b, так что трос 138b продолжается вниз в по существу вертикальном направлении до соответствующего ребра 130, как показано.
[0085] Кольцеобразный обод 126, показанный на Фигуре 1A, обозначен пунктирными линиями на Фигуре 1B, так что видна сферическая опора 110. В направлении вокруг обода 126 тросовые демпферы 132a и 132b расположены чередующимся образом, так что каждое ребро 130, которое соединено с вертикально выровненным тросом 138b, расположено смежно с двумя ребрами 130, соединенными с частично поперечным тросом 138a, и наоборот. Пунктирные линии, иллюстрирующие положение тросов 138a и 138b, также показаны на Фигуре 1A. Пневматические поршни кассет 134a и 134b могут ослаблять вибрации носителя 101 на узле 106 основания. В этом варианте выполнения каждый вертикально поддерживающий тросовый демпфер 132b равноудален в горизонтальном направлении от соседних поперечно поддерживающих тросовых демпферов 132a. Таким образом, тросовые демпферы 132a и 132b могут ослаблять вертикальные и горизонтальные вибрации оболочки 102 носителя и буксировочной рамы 104.
[0086] Со ссылкой на Фигуру 1B узел 106 основания содержит опорную стойку 144, которая продолжается вверх от основания 128, поддерживая инструментальную платформу 108 через сферическую опору 110. Ребра 130 поддерживают опорную стойку 144, которая вертикально выступает из точки пересечения ребер 130, поддерживая сферическую опору 110, на которой установлена инструментальная платформа 108. В этом варианте выполнения опорная стойка выполнена в виде столба, однако в других вариантах выполнения могут быть использованы другие конструкции опорной стойки. Выражение «опорная стойка», используемое в настоящем документе, не обязательно означает опорную стойку, продолжающуюся вверх от конструкции основания. Например, опорная стойка может содержать один или более участков, которые продолжаются по меньшей мере частично горизонтально или под углом. Опорная стойка может представлять собой любую конструкцию, подходящую для поддержания сферической опоры и инструментальной платформы.
[0087] Совместно множество ребер 130 образуют полость, частично принимающую инструментальную платформу 108 и позволяющую вращение инструментальной платформы 108 вокруг сферической опоры 110 без столкновения со сторонами полости, как наилучшим образом показано на Фигуре 1B. В этом примере ребра 130 конструктивно поддерживаются дополнительными панелями 131.
[0088] В этом примере инструментальная платформа 108 является жесткой и удерживает множество датчиков 146 векторных составляющих. Инструментальная платформа 108 может быть «жесткой» в том смысле, что шум движения, связанный с деформациями инструментальной платформы 108, не так существенен по сравнению с другим шумом движения. Датчики 146 могут представлять собой электромагнитные (ЭМ) датчики векторных составляющих. В некоторых вариантах выполнения датчики 146 могут содержать три или более датчиков. Например, датчики 146 векторных составляющих могут включать в себя три независимо ориентированных датчика векторных составляющих. Некоторые варианты выполнения могут включать в себя четыре или более датчиков. Варианты выполнения не ограничиваются конкретным количеством или конструкцией датчиков векторных составляющих. Инструментальная платформа 108 утяжелена в нижней части, так что ее центр тяжести находится под центром вращения вокруг сферической опоры.
[0089] В альтернативном варианте выполнения сферическая опора может быть прикреплена непосредственно к носителю или может поддерживаться непосредственно носителем 101. В некоторых вариантах выполнения узел основания может быть частью носителя или может быть встроен в носитель. Например, в некоторых вариантах выполнения сферическая опора может быть установлена на носителе, в связи с чем часть носителя служит в качестве узла основания.
[0090] В некоторых вариантах выполнения установка сферической опоры 110 на носителе может содержать признаки, раскрытые в публикации заявки на патент США № 2011/0175604 (на имя Polzer и др.).
[0091] В некоторых вариантах выполнения соединительный механизм между носителем 101 и узлом 106 основания не является системой тросовых демпферов. В некоторых вариантах выполнения соединительный механизм может содержать пневматическую систему демпфирования вибраций и связанные системы, раскрытые в публикации заявки на патент США № 2013/0200248 (A1) на имя Polzer и др., содержание которой включено в настоящий документ путем ссылки. Сжатый воздух может подаваться из насоса подачи воздуха, установленного на буксировочном тросе, в носитель по трубе подачи воздуха, установленной на буксировочном тросе.
[0092] Носитель 101 может быть стабилизирован для буксировки по воздуху за счет распределения веса таким образом, что вес носителя и его содержимого ниже оси 121 превышает вес, расположенный выше оси.
[0093] При подъеме носителя 101 воздушным транспортным средством оси 122a и 122b поддерживают его вес. Оболочка 102 носителя может поворачиваться вокруг оси 121 и не может передавать крутящий момент на внутренние системы, которые могут сохранять свою приблизительно вертикальную ориентацию. При перемещении летательного аппарата вперед воздушный поток вокруг оболочки 102 носителя может вызывать вращение оболочки носителя вокруг горизонтальной оси 121. Поскольку оболочка носителя поворотно соединена с осями 122a и 122b, любое такое вращение по существу не связано с буксировочной рамой 104 и, следовательно, с инструментальной платформой 108, которую она поддерживает.
[0094] Фигура 1C представляет собой разобранный вид в разрезе узла 106 основания, сферической воздушной опоры 110 и инструментальной платформы 108 по отдельности в соответствии с некоторыми вариантами выполнения. Кольцеобразный обод 126, показанный на Фигуре 1A, обозначен пунктирными линиями на Фигуре 1C, так что видна сферическая опора 110. В этом примере инструментальная платформа 108 имеет нижний участок 152, содержащий полый конус 157 (который может представлять собой усеченный конус) с верхней внутренней вершиной 153, которая находится в зацеплении и поддерживается на сферической воздушной опоре 110. Инструментальная платформа 108 также имеет верхний участок 154, содержащий цилиндрическую часть или шток 159, который продолжается вверх от конуса 157, над вершиной 153 и в обращенную вниз полусферическую полость, образованную буксировочной рамой 104 (показанной на Фигурах 1A и 1B). Главная ось 156 инструментальной платформы проходит через конус 157 и шток 159. Сферическая опора 110 обеспечивает низкофрикционное или практически бесфрикционное вращение относительно главной оси 156 инструментальной платформы, называемое «поворотным вращением» или «креном и тангажом», а также вращение платформы вокруг главной оси 156, которое называется либо «вращением», либо «рысканием». В некоторых вариантах выполнения сферическая опора 110 является единственным механическим соединением между узлом 106 основания и инструментальной платформой 108.
[0095] Узел 106 основания включает в себя главный участок 155 основания (содержащий ребра 130, основание 128 и обод 126) и опорную стойку 144 в форме столба, которая надежно прикреплена к главному участку 155 основания и продолжается вверх от него. Ребра 130 узла 106 основания имеют такие размеры и расположены под таким углом, чтобы обеспечивать диапазон крена и тангажа инструментальной платформы 108 на сферической воздушной опоре 110 на 10-30 градусов.
[0096] Варианты выполнения не ограничиваются конкретной конструкцией узла 106 основания, показанной на Фигурах 1A и 1B. Например, в другом варианте выполнения узел основания может содержать блок с опорной стойкой на нем для поддержания сферической опоры и инструментальной платформы. Для поддержания сферической опоры и инструментальной платформы может быть использована любая подходящая конструкция.
[0097] В этом варианте выполнения сферическая опора 110 включает в себя выступающую, скругленную часть 158, прикрепленную к инструментальной платформе 108, и седло 160, прикрепленное к опорной стойке 144. Выступающая часть 158 взаимодействует с седлом 160, обеспечивая низкофрикционное или практически бесфрикционное вращение.
[0098] На инструментальной платформе 108, показанной на Фигуре 1B, также обеспечена дополнительная система 650 выравнивания (рассмотрена более подробно ниже со ссылкой на Фигуру 6C).
[0099] На Фигуре 1C также показан экранированный отсек 170 электронного оборудования, который может вмещать высокоточный трехкомпонентный акселерометр 164 или в некоторых вариантах выполнения электрические компоненты, создающие помехи.
[00100] Фигура 1D представляет собой вид в перспективе носителя 101 и троса 103. Носитель 101 подвешен с обеих сторон на буксировочном тросе 103, который прикреплен к летательному аппарату (не показан). Буксировочный трос 103 может раздваиваться, образуя пару буксировочных тросов в форме перевернутой буквы «Y», причем раздвоенные участки перевернутой «Y» прикреплены к противоположным сторонам носителя 101. В этом варианте выполнения концы буксировочного троса 103 прикреплены к жестким буксировочным кронштейнам 125, которые жестко передают поддерживающие усилия через оси 122a и 122b на буксировочную раму 104 (показанную на Фигурах 1A и 1B) и оболочку 102 носителя. В других вариантах выполнения буксировочный трос 103 может быть непосредственно прикреплен к буксировочной раме и оболочке носителя или иным образом поддерживать их. Для соединения носителя 101 с транспортным средством может быть использован любой подходящий способ.
[00101] При приземлении на землю вес носителя поддерживается посадочными опорами 150. После приземления буксировочный трос 103 провисает и может размещаться на земле. Фигура 1B иллюстрирует конфигурацию буксировочного троса в случае, когда носитель находится в воздухе и поддерживается буксировочными тросами.
[00102] В устройстве 100, показанном на Фигурах 1A-1D, центр вращения, обеспеченный сферической опорой 110, находится над центром масс инструментальной платформы 108, что делает инструментальную платформу «утяжеленной в нижней части».
[00103] Фигура 2 представляет собой структурную схему, иллюстрирующую структурную компоновку устройства 100, показанного на Фигурах 1A-1D. Стрелки 202a-202f, показанные на Фигуре 2, указывают направление поддерживающих усилий. Носитель 101 который включает в себя оболочку 102 носителя и буксировочную раму 104, показанные на Фигуре 1A, может буксироваться транспортным средством (не показано) на буксировочном тросе 103. Носитель 101 поддерживает узел 106 основания с помощью соединительного механизма 105. В частности, в примере, показанном на Фигурах 1A-1D, буксировочная рама 104 носителя 101 поддерживает узел основания с помощью соединительного механизма 105. В устройстве 100, показанном на Фигурах 1A-1D, соединительный механизм 105 содержит систему 123 тросовых демпферов, показанную на Фигуре 1B. Однако могут быть использованы другие соединительные системы. Узел 106 основания поддерживает сферическую опору 110, которая, в свою очередь, поддерживает утяжеленную в нижней части инструментальную платформу 108.
[00104] В некоторых вариантах выполнения (например, в гравиметрических системах) узел основания может содержать трехосевую платформу с компенсацией движения. Например, такие системы могут быть установлены на летательном аппарате.
[00105] Инструментальная платформа 108 может содержать решетку или ферму, листовые или пластинчатые поверхности или их сочетание.
[00106] Как отмечено выше, на инструментальной платформе 108 закреплен по меньшей мере один датчик 146 векторных составляющих. В этом варианте выполнения по меньшей мере один датчик 146 включает в себя один или более ЭМ-датчиков векторных составляющих. ЭМ-датчики могут представлять собой ЭМ-датчики градиентометрического или иного типа. Хотя примеры, описанные в настоящем документе, относятся к ЭМ-датчикам, следует понимать, что варианты выполнения не ограничиваются использованием ЭМ-датчиков, и в других вариантах выполнения на инструментальной платформе могут быть установлены другие типы датчиков векторных составляющих. В других вариантах выполнения датчики 146 могут включать в себя один или более гравиметрических датчиков, которые также могут представлять собой гравиметрические датчики градиентометрического или иного типа. Также могут быть использованы другие типы градиентометрических датчиков векторных составляющих. Варианты выполнения не ограничиваются сбором данных конкретного типа.
[00107] Варианты выполнения не ограничиваются конкретной конструкцией, показанной на Фигурах 1A-1C. Например, инструментальная платформа может иметь множество различных форм. В некоторых вариантах выполнения инструментальная платформа является по существу сплющенной. Например, инструментальная платформа может быть иметь приблизительную дискообразную форму. В случае сплющенной инструментальной платформы дистальные части инструментальной платформы могут продолжаться в поперечном направлении от сферической опоры. В других вариантах выполнения инструментальная платформа является по существу вытянутой. В этом случае дистальные части инструментальной платформы могут лежать по существу над и под сферической опорой.
[00108] Инструментальная платформа может содержать конструкцию для установки одного или более ЭМ-датчиков, используемых для сбора данных ЭМ-съемки, и может поддерживать электронное оборудование и вспомогательные датчики, необходимые для сбора данных и последующей обработки. В некоторых вариантах выполнения инструментальная платформа является жесткой. Инструментальная платформа может иметь высокий момент инерции. Сферическая опора может быть единственной точкой контакта между узлом основания и инструментальной платформой. Инструментальная платформа вращается на сферической опоре вокруг одной точки, а именно «центра вращения».
[00109] Данные ЭМ-датчиков могут собираться непрерывно при условии, что пределы углового движения инструментальной платформы вокруг сферической опоры не достигнуты. Таким образом, по меньшей мере один ЭМ-датчик, установленный на инструментальной платформе, может быть по существу не связан с вибрационным движением носителя, который может наклоняться под углом тангажа и крена вокруг него.
[00110] Фигура 3 представляет собой схематический вид сбоку примерной инструментальной платформы 300 в соответствии с некоторыми вариантами выполнения. Прямоугольный профиль, показанный на Фигуре 3, необязательно представляет реальную форму инструментальной платформы 300. Скорее, Фигура 3 просто иллюстрирует утяжеленный в нижней части характер инструментальной платформы 300. Например, инструментальная платформа 300, показанная на Фигуре 3, может иметь конструкцию и форму инструментальной платформы 108, показанной на Фигурах 1A-1C.
[00111] Инструментальная платформа 300 имеет центр 304 масс и центр 306 вращения. Центр 306 вращение представляет собой точку, в которой инструментальная платформа 300 в собранном состоянии будет вращаться вокруг сферической опоры (например, сферической опоры 110, показанной на Фигуре 1C). Фигура 3 показывает взаимосвязь между центром 304 масс и центром 306 вращения инструментальной платформы 300. В частности, инструментальная платформа 300 утяжелена в нижней части. В утяжеленной в нижней части инструментальной платформе 300 центр 304 масс находится под центром 306 вращения, причем поддержка обеспечивается сферической опорой (не показана). Главная ось 308 инструментальной платформы 300 может быть определена как ось, проходящая через центр 306 вращения и центр 304 масс. В соответствии с некоторыми вариантами выполнения инструментальная платформа 300 содержит верхнюю часть 310, расположенную над центром 306 вращения, и нижнюю часть 312, расположенную под центром 306 вращения.
[00112] Схематический вид, показанный на Фигуре 3, не предназначен для представления реальной формы инструментальной платформы 300, в скорее для иллюстрации взаимосвязи центра 304 масс и центра 306 вращения. Реальная форма инструментальной платформы 300 может варьироваться. Например, верхняя часть 310 может быть выполнена в форме штока, а нижняя часть может быть в общем конической. Также возможны другие формы (сплющенная, вытянутая и т.д.). Утяжеление инструментальной платформы в нижней части может быть реализовано различными путями. Например, размеры, материалы и форма нижней и верхней частей 312 и 310 могут быть подобраны для обеспечения утяжеления в нижней части. Например, по сравнению утяжеленной по центру инструментальной платформой (где центр масс и центр вращение совмещены) нижняя часть 312 инструментальной платформы 300 может быть больше по размеру, может быть выполнена из более тяжелого материала, может быть толще или может быть утяжелена иным образом для обеспечения более низкого центра масс инструментальной платформы 300. Варианты выполнения не ограничиваются каким-либо конкретным способом утяжеления нижней части инструментальной платформы.
[00113] Инструментальная платформа 300 в состоянии покоя может быть вертикально сбалансирована с ее главной осью 308.
[00114] Силы, действующие на утяжеленную в нижней части инструментальную платформу 300, могут создавать разбалансирующий крутящий момент, поскольку центр 304 масс смещен от центра 306 вращения. Разбалансирующий крутящий момент может содержать гравитационный восстанавливающий крутящий момент, а также «крутящие моменты движения», обусловленные вибрациями сферической опоры, вызванными движениями носителя. Из-за периодического движения инструментальной платформы, обусловленного гравитационным восстанавливающим крутящим моментом, может возникать шум маятникового движения. Из-за ускорений сферической опоры, обусловленных вибрациями носителя, может возникать шум биения. Когда эти ускорения перпендикулярны главной оси 308, крутящий момент может воздействовать на инструментальную платформу 300, заставляя ее поворачиваться и вызывая угловое движение. Совместно шум маятникового движения и шум биения называются шумом разбалансировки. Хотя утяжеление в нижней части может вызывать шум разбалансировки, значительная часть шума разбалансировки может быть удалена из ЭМ-данных или может иметь настолько низкую амплитуду, что является несущественной.
[00115] При нахождении инструментальной платформы 300 в вертикальном положении с центром 304 масс, расположенным прямо под центром 306 вращения, гравитационные силы будут действовать через центр вращения, и гравитационный восстанавливающий крутящий момент будет отсутствовать.
[00116] В случае наклона инструментальной платформы гравитационный восстанавливающей крутящий момент может препятствовать вращательному движению при наклоне или вращении из вертикального положения. Гравитационный восстанавливающий крутящий момент может предотвращать или задерживать достижение инструментальной платформой пределов диапазона вращения вокруг центра вращения.
[00117] Уравновешивание в нижней части может продлевать время сбора данных по сравнению с временем, которое может быть получено для уравновешенной по центру инструментальной платформы, возможно, без привязей, исполнительных механизмов или других активных систем управления ориентацией, и исключать шум, обусловленный этими системами.
[00118] Характеристики шума маятникового движения и шума биения могут быть спрогнозированы на основе инерционных свойств инструментальной платформы 300. Инструментальная платформа 300 может характеризоваться моментами Ih и Iz инерции вокруг горизонтальной оси и главной (или вертикальной) оси 308, массой m и расстоянием L между центром 304 масс и центром 306 вращения, вокруг которого она вращается. Так как центр масс расположен под центром вращения, инструментальная платформа может совершать свободное маятниковое движение на сферической опоре с собственной частотой F=1/(2×pi)× кв. корень((m×g×L)/Ih). При использовании достаточно низкой степени разбалансировки (m×L) и высокого момента Ih инерции собственная частота шума маятникового движения может быть значительно ниже полосы частот сбора данных ЭМ-датчиков. Таким образом, инструментальная платформа может иметь частоту маятникового движения, которая подавляет шум движения в полосе частот сбора данных датчика (датчиков) векторных составляющих на инструментальной платформе. В данном контексте глагол «подавлять» не означает, что шум движения обязательно устраняется или является незначительным, а скорее, что шум движения утяжеленной в нижней части инструментальной платформы снижается утяжеленной в нижней части платформой.
[00119] Фигуры 4A и 4B представляют собой графики 400 и 410 соответственно, которые иллюстрируют возникновение шума биения и его проявление. Для гармонических ускорений амплитудой a0 перпендикулярно главной оси (например, главной оси 308, показанной на Фигуре 3) и частоты f зависимость от времени может быть определена как a0×sin(2×pi×f×t). Гармонический шум биения может быть задан путем перемножения ускорения a0 и передаточной функции W шума биения, и может записан в следующем виде W=a0×Wt, где Wt=m×L/(4×Ih×pi2×f2). График 400, показанный на Фигуре 4A, иллюстрирует шум биения как произведение ускорения и передаточной функции шума биения. Показана форма спектра ускорения, характерная для воздушного носителя. Шум биения, показанный на Фигуре 4A, имеет значительно более крутой наклон при увеличении частоты по сравнению с самим ускорением.
[00120] График 410, показанный на Фигуре 4B, иллюстрирует влияние шума биения и маятникового движения на измеренные ЭМ-данные. Желательными являются ЭМ-данные в конкретной полосе частот измерений, которая показана светло-серым цветом. Даже в стационарной среде без вибраций ЭМ-система имеет минимальный уровень шума, обусловленный электроникой и другими источниками. Этот минимальный уровень шума обычно слегка наклонен вправо на графике в двойном логарифмическом масштабе, как показано пунктирно-точечной линией. Частота маятникового движение может быть выбрана таким образом, что шум маятникового движения (точечная линия) гораздо меньше минимального уровня шума в полосе частот измерений. Шум биения (пунктирная линия) имеет гораздо более крутой наклон, чем минимальный уровень шума системы, который он пересекает на «частоте отсечки шума биения» (сплошная вертикальная линия). Для частот выше этой частоты отсечки системный шум может преобладать над шумом измерений, и шум биения не оказывает существенного влияния. Если частота отсечки выше нижнего предела полосы частот измерений, между ними будет находиться полоса частот сигнала, в которой сигнал загрязняется шумом биения. В случае присутствия такого внутриполосного шума биения он может быть спрогнозирован путем измерения ускорений сферической опоры. Затем спрогнозированный шум биения может быт вычтен или иным образом удален из измеренных данных для получения улучшенной оценки ЭМ-данных без шума биения.
[00121] На практике ЭМ-датчики могут иметь чувствительность к сигналах на частотах ниже их полосы частот измерений. В таких случаях низкочастотный шум разбалансировки может накладываться на сигнал, на который реагирует ЭМ-датчик. Например, данные, полученные за периоды, превышающие естественный период маятникового движения инструментальной платформы, могут содержать медленно изменяющийся синусоидальный сигнал, обусловленный изменением ориентации ЭМ-датчиков в магнитном поле Земли. Низкочастотный шум может быть отделен от внутриполосного сигнала несколькими способами. Например, такой низкочастотный шум может быть удален с помощью способов компенсации, раскрытых в документе WO2014/146184 (A1) на имя West и др. Для отделения внеполосного низкочастотного шума от внутриполосного ЭМ-сигнала также могут быть использованы способы фильтрации, известные в уровне техники.
[00122] Следующие характеристики могут гарантировать сбор электромагнитных данных высокого качества с низким уровнем шума разбалансировки:
i. амплитуда шума маятникового движения достаточно мала, чтобы покрываться динамическим диапазоном ЭМ-датчика,
ii. частота шума маятникового движения является достаточно низкой, чтобы находиться за пределами требуемой полосы частот сбора данных, обеспечивая возможность удаления шума разбалансировки, обусловленного маятниковым движением, путем фильтрации,
iii. сигналы шума биения, обусловленные крутящими моментами на утяжеленной в нижней части инструментальной платформе, которые могут быть вызваны боковыми ускорениями сферической опоры, являются достаточно низкими, и
iv. сигналы шума биения могут быть вычислены и удалены из сигнала ЭМ-датчика.
[00123] Снова обратимся к Фигуре 2, шум биения может быть дополнительно снижен, если соединительный механизм 105, который соединяет узел 106 основания с носителем 101, содержит демпфирующие вибрацию компоненты, например, амортизаторы, тросы, демпферы, пружины или пневматические элементы. Такой демпфирующий вибрацию соединительный механизм 105 может уменьшать вибрации, передаваемые по нему с носителя 101, и, следовательно, может ослаблять вибрации сферической опоры 110. Таким образом, крутящие моменты движения, действующие на инструментальную платформу, 108 могут быть уменьшены, при этом соответственно снижается шум разбалансировки. Функция демпфирующего вибрацию соединительного механизма 206 может заключаться в ослаблении спектра ускорения, показанного на Фигуре 4A, что приводит к снижению шума биения. В дополнение к снижению шума в ЭМ-измерении снижение шума биения преимущественно снижает частоту отсечки шума биения, показанную на Фигуре 4B.
[00124] Шум разбалансировки возникает из-за смещения центра масс от центра вращения, обеспеченного сферической опорой. Функция сферической опоры 110 в соответствии с некоторыми вариантами выполнения заключается в переносе веса инструментальной платформы 108 на узел 106 основания при одновременном обеспечении низкофрикционного или по существу бесфрикционного вращения инструментальной платформы в любом угловом направлении. Выражение «сферический» не предназначено для описания или ограничения формы опоры, а описывает диапазон угловых перемещений, обеспечиваемый опорой. Опоры сферической формы, например, сферические воздушные опоры, или острые или немного скругленные наконечники могут обеспечивать требуемый диапазон вращательного перемещения. Сферическая опора обеспечивает единственный центр вращения инструментальной платформы. Сферическая опора может вращательно отделять движение узла основания от инструментальной платформы относительно трех независимых осей. Сферическая опора может позволять неограниченное вращение вокруг главной оси инструментальной платформы 108, при этом также обеспечивая возможность вращения в пределах предельного угла наклона вокруг осей, ортогональных главной оси, с учетом углового расположения и ограничений инструментальной платформы и ограничений самой сферической опоры.
[00125] Фигуры 5A-5D иллюстрируют четыре примера возможных конфигураций сферических опор, которые могут быть использованы в качестве сферической опоры 110 в устройстве 100, показанном на Фигурах 1A-1D.
[00126] Фигура 5A представляет собой вид сбоку в разрезе сферической воздушной опоры 500a в соответствии с одним вариантом выполнения. Сферическая опора 500a включает в себя первую часть 502a и вторую часть 504a. Первая часть 502a может быть прикреплена к узлу основания (например, к опорной стойке 144 узла 106 основания, показанного на Фигуре 1C). Вторая часть 504a может быть прикреплена к инструментальной платформе (например, к инструментальной платформе 108 или 300, показанной на Фигурах 1A-1C и 3). В этом варианте выполнения первая часть 502a содержит седло 506a. Вторая часть 504a содержит выступающую часть 508a, которая взаимодействует с седлом 506a. В этом варианте выполнения седло 506a представляет собой вогнутое сферическое седло, а выступающая часть 508a имеет сферическую форму и входит в вогнутое сферическое седло 506a. Стрелки 510a указывают направление восходящего воздушного потока из узла основания в сферическую воздушную опору 500a. Сферическая выступающая часть 508a может вращаться в соответствующем сферическом седле 506a, отделенном от нее воздушной подушкой. Этот тип сферической воздушной опоры может быть предпочтителен для поддержания массы инструментальной платформы. Однако варианты выполнения не ограничиваются каким-либо конкретным типом опоры.
[00127] Фигура 5B представляет собой вид сбоку в разрезе сферической воздушной опоры 500b в соответствии с другим вариантом выполнения. Сферическая опора 500b включает в себя первую часть 502b и вторую часть 504b. Первая часть 502b может быть прикреплена к инструментальной платформе (например, инструментальной платформе 108 или 300, показанной на Фигурах 1A-1C и 3). Эта сферическая воздушная опора 500b конструктивно аналогична сферической опоре 500a, показанной на Фигуре 5A, но вертикально перевернута. Стрелки 510b указывают направление восходящего воздушного потока из узла основания в сферическую воздушную опору 500b.
[00128] Фигура 5C представляет собой вид сбоку в разрезе сферической опоры 500c в соответствии с другим вариантом выполнения. Сферическая опора 500c включает в себя первую часть 502c, которая может быть прикреплена к узлу основания, и вторую часть 504c, которая может быть прикреплена к инструментальной платформе. В этом варианте выполнения первая часть 502c содержит седло 506c в виде наковальни. Вторая часть 504c содержит жесткую выступающую часть 508c в виде наконечника, которая взаимодействует с седлом 506c в виде наковальни. Выступающая часть 508c в виде наконечника может вращаться в седле 506c в виде наковальни.
[00129] Фигура 5D представляет собой вид сбоку в сечении сферической опоры 500d в соответствии с другим вариантом выполнения. Сферическая опора 500d включает в себя первую часть 502d, которая может быть прикреплена к инструментальной платформе, и вторую часть 504d, которая может быть прикреплена к узлу основания. Эта сферическая опора 500d конструктивно аналогична сферической опоре 500c, показанной на Фигуре 5C, но вертикально перевернута. Примеры, показанные на Фигуре 5C и 5D, могут быть использованы, например, на более легких инструментальных платформах меньшего размера, например, на инструментальной платформе, содержащей один или более MEMS-датчиков. Однако примеры, показанные на Фигурах 5C и 5D, не ограничиваются таким использованием.
[00130] Специалистам в данной области техники будет понятно, что случаи, проиллюстрированные на Фигурах 5A-5D, следует рассматривать как примерные, а не ограничивающие, и что возможно множество конфигураций сферической опоры, которые гарантируют аналогичный эффект, при этом обеспечивая требуемый диапазон низкофрикционного или почти бесфрикционного вращательного движения.
[00131] Поскольку аспекты настоящего изобретения могут быть использованы для сбора данных электромагнитной или другой съемки с подвижного носителя, инструментальная платформа может быть зафиксирована или иным образом привязана к носителю или узлу основания для транспортировки или доставки к месту съемки. Соответственно, некоторые варианты выполнения могут содержать систему фиксации для удержания инструментальной платформы в фиксированном положении относительно узла основания во время транспортировки. При необходимости сбора данных съемки инструментальная платформа может быть освобождена или отвязана от носителя для независимого вращения. При освобождении инструментальной платформы она может сохранять угловую скорость, приобретенную в зафиксированном или привязанном состоянии. В таких случаях инструментальную платформу необходимо выровнять так, чтобы ее главная ось была по существу вертикальной и располагалась с небольшой или нулевой угловой скоростью.
[00132] Некоторые варианты выполнения также могут содержать систему выравнивания для регулировки ориентации, а также угловой скорости инструментальной платформы. В начале сбора данных предпочтительно размещать инструментальную платформу (например, инструментальную платформу 108 и 300, показанную на Фигурах 1A-1C и 3) в такой ориентации, чтобы ее главная ось (например, ось 308, показанная на Фигуре 3) была по существу вертикальной, поскольку это гарантирует, что инструментальная платформа будет ориентирована максимально далеко от пределов углового движения без гравитационной потенциальной энергии. Таким образом, можно максимизировать продолжительность сбора данных до достижения пределов углового движения. Также может быть предпочтительно, чтобы инструментальная платформа имела небольшую или нулевую угловую скорость, поскольку это также может максимизировать продолжительность сбора данных до достижения пределов углового движения. Когда система выравнивания размещает инструментальную платформу с небольшой или нулевой угловой скоростью и по существу вертикальной главной осью, ЭМ или другие данные векторных составляющих могут собираться с минимальным шумом движения в течение максимального времени.
[00133] Система выравнивания может быть расположена на инструментальной платформе и может содержать движители или подвижную массу, которая может регулировать гравитационный крутящий момент, действующий на платформу. Система выравнивания может размещать инструментальную платформу в по существу вертикальном положении с практически нулевой угловой скоростью. Система выравнивания также может работать периодически для выравнивания инструментальной платформы, если достигнут предел наклонного углового движения. Система выравнивания также может тормозить вращение инструментальной платформы для уменьшения его угловой скорости.
[00134] Как отмечено ранее, поскольку инструментальная платформа может быть установлена на одной сферической опоре со смещением центра масс от центра вращения, вибрации сферической опоры могут создавать крутящий момент на инструментальной платформе. Этот крутящий момент может вызывать вращение инструментальной платформы, и это вращение может вызывать шум биения. Зная ускорения сферической опоры и инерционные свойства инструментальной платформы, можно рассчитать вращение и, следовательно, шум биения. Затем можно удалить шум биения из измеренных ЭМ-данных для получения ЭМ-данных, скорректированных на эффекты шума биения.
[00135] Фигура 6A представляет собой вид в перспективе примерной системы 600 выравнивания в соответствии с некоторыми вариантами выполнения. Система 600 выравнивания показана на дискообразной крышке 602, которая содержит верхнюю сторону цилиндрической верхней части инструментальной платформы (например, штока 159 верхнего участка 154 инструментальной платформы 108, показанной на Фигуре 1C). В этом примере система 600 выравнивания содержит первый, второй и третий узлы 604a, 604b и 604c подвижных масс. В других вариантах выполнения может быть использовано большее или меньшее количество узлов подвижных масс. Каждый узел 604a, 604b и 604c подвижной массы состоит из соответствующего линейного двигателя 611, направляющей 612 и массы 613. В этом примерном варианте выполнения верхняя крышка 602 включает в себя дополнительный отсек 616 электронного оборудования и крышку 614 доступа, которая закрывает отсек 616 электронного оборудования. Первый и второй узлы 604a и 604b подвижных масс выполнены с возможностью перемещения масс 613 в общем в горизонтальных направлениях x и y соответственно для регулировки выравнивающих крутящих моментов в направлениях y и x. Третий узел 604c подвижной массы обеспечивает регулировку степени утяжеления в нижней части и, следовательно, собственной частоты инструментальной платформы.
[00136] Фигура 6B представляет собой вид в перспективе другой примерной системы 650 выравнивания в соответствии с некоторыми вариантами выполнения. В этом примере система 650 выравнивания содержит первый, второй, третий и четвертый движители 654a, 654b, 654c и 654d. В других вариантах выполнения может быть использовано большее или меньшее количество подвижных движителей. В этом примере движители 654a, 654b, 654c и 654d представляют собой реверсивные вентиляторы. В этом варианте выполнения движители 654a, 654b, 654c и 654d установлены на дискообразной крышке 652, которая содержит верхнюю сторону цилиндрической верхней части инструментальной платформы (например, штока 159 верхнего участка 154 инструментальной платформы 108, показанной на Фигуре 1C). В этом варианте выполнения первый и второй реверсивные вентиляторы 654a и 654b выполнены с возможностью передачи крутящего момента вокруг соответствующей горизонтальной оси вращения через сферическую опору. Третий и четвертый реверсивные вентиляторы 654c и 654d выполнены с возможностью передачи крутящего момента через сферическую опору вокруг главной оси инструментальной платформы (например, оси 308, показанной на Фигуре 3). В этом примерном варианте выполнения верхняя крышка 602 включает в себя дополнительный отсек 665 электронного оборудования и крышку 664 доступа, которая закрывает отсек 665 электронного оборудования.
[00137] В некоторых вариантах выполнения ускорения сферической опоры измеряются одним или более акселерометрами. Например, ускорение может быть измерено высокоточным трехкомпонентным акселерометром 164, показанным на Фигуре 1C. Один или более акселерометров могут быть расположены на инструментальной платформе (например, на инструментальной платформе 108, показанной на Фигурах 1A-1C) вблизи сферической опоры (например, сферической опоры 110, показанной на Фигурах 1A-1C), так что любые кориолисовы или центростремительные вращательные силы, которые они могут воспринимать из-за вращения инструментальной платформы вокруг сферической опоры, являются незначительными. Между входными данными ускорения, измеренными трехкомпонентным акселерометром, и угловым движением инструментальной платформы, вызванным результирующими крутящими моментами, может быть определена прямая математическая зависимость, например, передаточная функция Wt. Передаточная функция Wt может быть записана в следующем виде:
i. Wt=m×L/(4×Ih×pi2×f2).
[00138] В некоторых вариантах выполнения также известны и могут быть реализованы другие математические зависимости между ускорением и угловым движением, например, с использованием нейронных сетей, нечеткой логики, таблиц соответствия, фильтрации с предсказанием, метода наименьших квадратов или других методов подбора моделей.
[00139] На инструментальной платформе могут быть использованы феррозондовый магнитометр векторных составляющих, гироскопы, GPS и другие связанные устройства. Эти инструменты могут измерять статическое магнитное поле Земли в рамках инструментальной платформы и могут определять ориентацию, движение и местоположение инструментальной платформы в рамках Земли. Данные датчиков могут быть сохранены в контроллере, находящемся на инструментальной платформе, или они могут быть переданы беспроводным образом в контроллер или устройство записи данных, расположенное вблизи инструментальной платформы, например, на носителе. Входные данные от этих инструментов и датчиков также могут использоваться для управления работой систем фиксации и/или выравнивания.
[00140] Некоторые варианты выполнения включают в себя или подключены к системам сжатого воздуха для подачи сжатого воздуха в один или более пневматических компонентов. Как отмечено выше, сферическая опора может представлять собой воздушную опору, и системы сжатого воздуха могут подавать воздух в опору. Соединительный механизм между носителем и узлом основания также может включать в себя подавляющие вибрацию пневматические элементы, которые принимают сжатый воздух из системы сжатого воздуха. Также могут быть включены другие пневматические элементы. Система сжатого воздуха может содержать воздушный насос или резервуары подачи воздуха, трубопроводы подачи воздуха, клапаны, регуляторы и накопители или буферные резервуары. Варианты выполнения не ограничиваются какой-либо конкретной конструкцией системы сжатого воздуха, и некоторые варианты выполнения могут работать без системы сжатого воздуха.
[00141] В некоторых вариантах выполнения устройство (содержащее по меньшей мере узел основания, сферическую опору, утяжеленную в нижней части инструментальную платформу и датчики) переносится носителем, выполненным с возможностью съемки с воздуха. Носитель может представлять собой «гондолу» или «зонд», буксируемый летательным аппаратом, как правило, вертолетом, с использованием буксировочного троса, который может иметь длину в диапазоне от 30 до 90 метров. Носитель может иметь форму, позволяющую минимизировать сопротивление на скорости буксировки 25-30 метров в секунду. Буксируемая гондола может содержать полость, в которой могут быть установлены узел основания, сферическая опора и инструментальная платформа, описанные в настоящем документе.
[00142] Фигура 7 представляет собой схематический вид в разрезе устройства 700 сбора данных в соответствии с некоторыми вариантами выполнения. Устройство 700 включает в себя узел 702 основания, сферическую опору 704 и инструментальную платформу 706. Сферическая опора 704 установлена на узле 702 основания, а инструментальная платформа 706 установлена на сферической опоре 704 и поддерживается ей. Сферическая опора 704 обеспечивает возможность свободного углового вращения инструментальной платформы 706 в пределах диапазона угла наклона вокруг сферической опоры 704. Инструментальная платформа 706 утяжелена в нижней части аналогично инструментальной платформе 300, показанной на Фигуре 3 (т.е. центр 723 масс инструментальной платформы 706 расположен под центром 720 вращения).
[00143] В этом варианте выполнения узел 702 основания содержит главный участок 708 основания и опорную стойку в виде столба 710, который надежно прикреплен и продолжается вверх от главного участка 708 основания. Столб 710 продолжается вверх вдоль оси 712 столба. Сферическая опора 704 содержит седло 714, прикрепленное к верхней поверхности столба 710. Сферическая опора 704 представляет собой воздушную опору с выступающей частью 716, прикрепленной к инструментальной платформе 706 (аналогично воздушной опоре 500a, показанной на Фигуре 5A).
[00144] Инструментальная платформа 706, показанная на Фигуре 7, представляет собой корпус, содержащий нижнюю часть 717, расположенную в общем под центром 720 вращения. Нижняя часть 717 выполнена в форме конической обращенной вниз юбки 718, которая образует обращенный вниз открытый раструб со сферической опорой 704, расположенной в его вершине 721. Центр масс инструментальной платформы 706 находится на расстоянии под вершиной 721. Такое расположение конической юбки 718 и столба 710 может обеспечивать возможность вращения главной оси 722 инструментальной платформы 706 на сферической опоре 704 относительно оси 712 столба в диапазоне предельного угла α наклона, показанного на Фигуре 7. В частности, раструб, образованный конической юбкой 718, обеспечивает зазор вокруг сферической опоры и узла основания, обеспечивающий диапазон наклонного вращения инструментальной платформы в пределах диапазона угла наклона. Допустимое вращение в направлениях, ортогональных главной оси 722, может быть больше или меньше предельного угла α, показанного на Фигуре 7, в соответствии с углом раскрытия конической юбки 718 и/или угловым диапазоном движения, обеспечиваемым сферической опорой 704. Варианты выполнения не ограничиваются конкретным диапазоном вращения.
[00145] В некоторых вариантах выполнения к утяжеленной в нижней части инструментальной платформе 706 надежно прикреплен один ЭМ-датчик векторных составляющих (например, датчик 146, показанный на Фигурах 1A-1C). В другом варианте выполнения к утяжеленной в нижней части инструментальной платформе 706 надежно прикреплены три ЭМ-датчика, расположенных в независимых ориентациях зондирования.
[00146] В некоторых вариантах выполнения инструментальная платформа, описанная в настоящем документе, выполнена из жесткого и/или резистивного композиционного материала.
[00147] Фигуры 8 и 9 иллюстрируют примерную инструментальную платформу 800 для сбора данных с воздуха в соответствии с другим вариантом выполнения. На Фигуре 8 инструментальная платформа 800 показана в частичном разрезе, так что видны опорная стойка в виде столба 810 и сферическая опора 804. Инструментальная платформа 800 установлена на указанном столбе 810 через сферическую опору 804 аналогично другим вариантам выполнения, описанным в настоящем документе. Инструментальная платформа 800 содержит корпус 806 платформы, содержащий нижний участок 817, включающий в себя коническую юбку 818, которая образует обращенный вниз открытый конический раструб, и верхний участок 819, включающий в себя цилиндрический шток 820. В этом варианте выполнения сферическая опора 804 представляет собой сферическую опору с седлом 814 и выступающей частью 816. Столб 810 может продолжаться вверх от главного участка узла основания (например, узла 106 основания, показанного на Фигурах 1A-1C, или узла 702 основания, показанного на Фигуре 7). Выступающая часть 816 воздушной опоры 814 прикреплена и обращена вниз от вершины 821 конической юбки 818, а седло 814 надежно прикреплено к верхней поверхности столба 810. Обращенная вниз коническая юбка 818 расположена так, чтобы обеспечивать диапазон наклонного вращения инструментальной платформы 800 в пределах предельного угла наклона инструментальной платформы 800 и сферической опоры 804.
[00148] В этом варианте выполнения инструментальная платформа 800 напоминает перевернутую воронку, поддерживаемую воздушной опорой от вершины 821 конической юбки 818 воронки, с цилиндрическим штоком 820, продолжающимся вверх от вершины. Центр масс инструментальной платформы 800 находится на расстоянии под вершиной 821 и под центром вращения вокруг цилиндрической опоры (не показан на Фигуре 8). По периферии инструментальной платформы, если смотреть сверху, расположены три пары продольных реберных опорных элементов 830 и 832, которые усиливают инструментальную платформу вдоль продольных участков, где в этом варианте выполнения установлены ЭМ-датчики 840 векторных составляющих. Парные элементы 830 и 832 могут быть прикреплены в продольном направлении вдоль внешних сторон инструментальной платформы 800. Для уменьшения деформаций платформы между ЭМ-датчиками 840, посередине между парными продольными элементами 830 и 832 расположены дополнительные опорные продольные элементы 834. Элементы 834 способствуют жесткости инструментальной платформы, поддерживая стабильные относительные направляющие косинусы между направлениями зондирования ЭМ-датчиков, и, следовательно, ограничивают шум движения, который связан с деформациями платформы. Эти опорные элементы 830, 832 и 834 продолжаются от дистального конца 835 конической юбки 818 до дистального конца 836 штока 820. Совместно продольные опорные элементы 830, 832 и 834 могут уменьшать деформацию изгиба, связанную с изгибом инструментальной платформы вокруг вершины 821. В этом примере инструментальная платформа 800 также включает в себя поперечные опорные элементы 838, которые проходят в горизонтальном направлении между продольными опорными элементами 830, 832 и 834. Поперечные элементы 838 разнесены в вертикальном направлении от сторон инструментальной платформы 800 и могут обеспечивать поперечную опору продольных элементов 830, 832 и 834. Варианты выполнения не ограничиваются конкретной формой и конструкцией этого примера инструментальной платформы 800.
[00149] В этом варианте выполнения инструментальная платформа является жесткой. Благодаря этой жесткости, шум движения из-за угловых движений датчиков векторных составляющих, вызванных деформациями инструментальной платформы в ответ на ускорение воздушной опоры, может быть приемлемо низким.
[00150] В одном варианте выполнения инструментальная платформа 800 имеет массу 75 кг, и утяжеление mL в нижней части 0,035 кг/м. Инструментальная платформа 800 может иметь естественный период около 1 минуты и может поддерживать три независимо ориентированных ЭМ-датчика с нижним пределом частоты сбора данных 1 Гц. Шум движения, связанный с маятниковым движением инструментальной платформы 800 в течение 1 минуты, может иметь обратную квадратичную частотную зависимость выше предела частоты сбора данных ЭМ-датчиков в 1 Гц и может быть легко удален стандартными способами, известными в уровне техники, которые могут содержать высокочастотную фильтрацию. В этом варианте выполнения шум движения носителя может эффективно подавляться за счет инерционных свойств инструментальной платформы 800, оставляя остаточный шум движения с благоприятной частотной зависимостью.
[00151] Фигура 10 представляет собой частичный вид в перспективе столба 810 и сферической опоры 804, показанных на Фигуре 8. В этом примере сферическая опора 804 представляет собой воздушную опору, хотя в других вариантах выполнения могут быть использованы другие сферические опоры. Седло 814 имеет вогнутую сферическую форму и прикреплено к верхней поверхности столба 810, как проиллюстрировано на Фигуре 10. Сжатый воздух может подаваться вверх через небольшие отверстия (не показаны) в седле 814 в небольшой зазор между ним и выпуклой сферической выступающей частью 816 (показана на Фигуре 9). Получаемая воздушная подушка, которая образуется между седлом 814 и выступающей частью 816 сферической воздушной опоры 804, может обеспечивать по существу низкофрикционную или почти бесфрикционную опору и соединение, на котором инструментальная платформа 800 (показана на Фигуре 9) может свободно вращаться относительно столба 810.
[00152] В некоторых вариантах выполнения, в частности, где датчики векторных составляющих представляют собой ЭМ-датчики, сферическая воздушная опора 804 выполнена из металла с плохой проводимостью и низкой магнитной проницаемостью, например, из титана. В других вариантах выполнения сферическая воздушная опора выполнена из керамики или другого резистивного и механически прочного материала. В других вариантах выполнения, например, где датчики векторных составляющих не являются ЭМ-датчиками (например, гравиметрические датчики), магнитная проницаемость и проводимость воздушной опоры могут незначительно влиять на измеренные данные поля. Варианты выполнения не ограничиваются каким-либо конкретным материалом. Если сферическая опора 804 и соединительный механизм (не показан) для носителя содержат пневматические элементы, для подачи воздуха в сферическую опору 800 и пневматические элементы, которые содержат соединительный механизм, может использоваться общая пневматическая система.
[00153] Фигура 11 представляет собой график 1100, иллюстрирующий шум движения и геомагнитный спектр в зависимости от частоты f для варианта выполнения, имеющего массу 75 кг и утяжеление в нижней части 0,035 кг/м. При сборе ЭМ-данных геомагнитный спектр является важным ориентиром, поскольку он показывает минимальный уровень шума в случае ЭМ-измерений с управляемым источником, и он показывает сигнал источника в случае ЭМ-измерений с естественным источником. Геомагнитный спектр в общем реагирует обратно пропорционально частоте между 1Гц и 500Гц, при этом шум биения может реагировать обратно пропорционально квадрату частоты в том же диапазоне.
[00154] Шум разбалансировки, показанный на Фигуре 11, представлен для сигнала бокового ускорения, который является спектрально плоским, с использованием наблюдаемых ускорений в диапазоне 6-15 Гц в одном варианте выполнения, предназначенном для аэроэлектромагнитной съемки. Шум разбалансировки может быть дополнительно снижен путем регулировки частотной характеристики соединительного механизма между носителем и узлом основания для уменьшения ускорений узла основания или путем дополнительной регулировки собственной частоты маятникового движения платформы в направлении снижения.
[00155] Аспекты шума разбалансировки могут регулироваться путем изменения утяжеления в нижней части в соответствии с целью съемки. При ЭМ-съемке естественных полей ЭМ-данные могут собираться на частотах, превышающих наименьший шумановский резонанс приблизительно на 8 Гц. Для такой съемки шум движения, показанный на Фигуре 11, является достаточно низким для обеспечения полезных оценок структуры проводимости Земли. При съемке с управляемым источником, где устройство ЭМ-съемки содержит передатчик, который вызывает изменяющийся во времени ток в земле, геомагнитный шум образует полезный минимальный уровень шума измерения, и шум движения, проиллюстрированный на Фигуре 11, является достаточно низким для сбора полезных данных вплоть до 2 или 3 Гц.
[00156] Снова обратимся к Фигурам 8 и 9, в варианте выполнения три ЭМ-датчика 840 установлены на корпусе 806 платформы между соответствующей парой продольных опорных элементов 830 и 832 на конической юбке 818 инструментальной платформы. В этом примере ЭМ-датчики 840 представляют собой электромагнитные датчики векторных составляющих, хотя могут быть использованы другие типы датчиков. Масса ЭМ-датчиков 840 может быть смещена на массу вспомогательного оборудования и аккумуляторов, расположенных в цилиндрическом штоке 820, для получения инструментальной платформы 800 (включающей в себя датчики и вспомогательное оборудование), немного утяжеленной в нижней части при балансировке на сферической опоре 804.
[00157] Каждый из ЭМ-датчиков 840 может представлять собой магнитометр с обратной связью с полосой частот сбора данных, продолжающейся от 1 Гц до 25 кГц, и спектральной плотностью мощности шума 1 пТл/кв. корень из Гц на 1 Гц. В этом варианте выполнения ЭМ-датчики 840 жестко прикреплены к инструментальной платформе. В этом примере ЭМ-датчики 840 равномерно разнесены по периферии конической юбки 818 инструментальной платформы 800. Однако следует понимать, что в других вариантах выполнения количество, тип и размещение датчиков могут отличаться. Некоторые варианты выполнения могут включать в себя четыре или более датчиков. Некоторые датчики могут быть независимо ориентированы. Кроме того, в некоторых вариантах выполнения один или более датчиков могут быть поменяны местами. В вариантах выполнения, подходящих для электромагнитной съемки естественных полей, ЭМ-датчик может, например, работать в полосе частот сбора данных от 8 до 700 Гц. В варианте выполнения, подходящем для электромагнитной съемки с управляемым источником, ЭМ-датчик может, например, работать в полосе частот сбора данных от 1 до 25 000 Гц и может иметь минимальный уровень шума порядка ниже пикоТесла на 1 Гц. В некоторых вариантах выполнения ЭМ-датчик может представлять собой магнитометр векторных составляющих.
[00158] Фигура 12 представляет собой структурную схему примерной системы 1200 датчиков, которая может быть реализована с использованием инструментальной платформы 1201. Инструментальная платформа 1201 может быть аналогична инструментальным платформам 108, 300, 706 или 800, показанным на Фигурах 1A-1C, 3, 8 и 9. В этом примере система 1200 включает в себя один или более ЭМ-датчиков 1202, один или более дополнительных вспомогательных датчиков и систем 1204, систему 1206 выравнивания, систему 1208 фиксации, первый и второй контроллеры 1210 и 1214, средство 1212 беспроводной связи и устройство 1216 записи данных. В этом примере ЭМ-датчик (датчики) 1202, вспомогательные датчик (датчики) и системы 1204, система 1206 выравнивания, первый контроллер 1210 и средство 1212 беспроводной связи установлены на инструментальной платформе 1201. Один или более компонентов также могут быть расположены за пределами инструментальной платформы. Например, в этом варианте выполнения второй контроллер 1214, система 1208 фиксации и устройство 1216 записи данных установлены за пределами инструментальной платформы. Средство 1212 беспроводной связи может включать в себя такое средство беспроводной связи, как беспроводной передатчик, приемник, приемопередатчик или любое подходящее их сочетание для осуществления беспроводной связи между первым и вторым контроллерами 1210 и 1214. В некоторых вариантах выполнения средство беспроводной связи может быть установлено непосредственно между первым контроллером 1210 и устройством 1216 записи данных.
[00159] ЭМ-датчик (датчики) 1202 и вспомогательные датчик (датчики) и системы 1204 могут быть установлены на инструментальной платформе 1201 в различных положениях. Вспомогательные датчик (датчики) и системы 1204 могут быть предназначены для сбора данных электромагнитной съемки. Вспомогательные датчики и системы 1204 также могут содержать средство определения пространственного положения, например, трехкомпонентный векторный магнитометр статического поля, акселерометр, гироскопы, датчики наклона и вращения. Вспомогательные датчики 1204 могут дополнительно содержать датчики GPS, Glonass или эквивалентные датчики.
[00160] Информация о пространственном положении инструментальной платформы позволяет перенос собранных электромагнитных векторных данных или других векторных данных датчиков из локальной системы координат инструментальной платформы в глобальную систему координат.
[00161] Как показано на Фигуре 12, ЭМ-датчик (датчики) 1202, вспомогательные датчик (датчики) и системы и система 1206 выравнивания подключены к первому контроллеру 1210 и управляются им. Первый и второй контроллеры 1210 и 1214 могут содержать один или более процессоров и память. Например, на Фигуре 12 показан первый контроллер, содержащий процессор 1211 и память 1213. Память 1213 может хранить команды для побуждения процессора 1211 к выполнению функций, рассмотренных в настоящем документе. Для реализации контроллеров 1210 и 1214 могут быть использованы другие сочетания аппаратного и программного обеспечения. Система 1208 фиксации и устройство записи данных подключены ко второму контроллеру 1214 и управляются им. Первый и второй контроллеры 1210 и 1214 находятся в беспроводном сообщении через средство 1212 беспроводной связи. На инструментальной платформе могут быть дополнительно установлены источники питания и аккумуляторы, необходимые для работы компонентов системы 1200.
[00162] Данные, собранные датчиками 1202 и/или 1204, могут храниться в базе данных. База данных может содержать память для хранения и извлечения данных. Например, первый и/или второй контроллеры 1210 и 1214 могут побуждать передачу принятых данных (например, с помощью средства 1212 беспроводной связи) для сохранения в базе данных. В конкретном примере, показанном на Фигуре 12, устройство 1216 записи данных содержит указанную базу данных. Таким образом, данные, собранные датчиками 1202 и/или 1204, могут быть загружены вторым контроллером 1214 и/или устройством 1216 записи данных с помощью средства 1212 беспроводной связи. Данные могут быть извлечены из устройства 1216 записи данных для последующей обработки. В других вариантах выполнения первый контроллер 1210 может включать в себя базу данных, реализованную в памяти 1213, для хранения указанных данных.
[00163] С использование средства 1212 беспроводной связи между первым контроллером 1210 и вторым контроллером 1214, инструментальная платформа может быть освобождена от каких-либо механических связей или соединительных кабелей, соединяющих ее с узлом основания или носителем при сборе ЭМ-данных, за исключением контакта на сферической опоре. В варианте выполнения отсутствуют соединительные кабели или ограничивающие устройства, которые могут затруднять свободное движение инструментальной платформы относительно узла основания. Средство 1212 беспроводной связи может содержать беспроводной передатчик. Альтернативно передающая часть средства 1212 беспроводной связи может быть частью контроллера 1210, и контроллер может обеспечивать функцию беспроводной связи. Варианты выполнения не ограничиваются конкретной компоновкой аппаратного обеспечения.
[00164] Подача питания компонентам на инструментальной платформе 1201 может осуществляться аккумулятором или эквивалентным источником питания, например, топливным элементом или конденсатором большой емкости. Питающие провода к датчикам 1202 и/или 1204 могут быть скручены для минимизации магнитных полей рассеяния от токов питания. Все элементы, установленные на инструментальной платформе 1201, могут быть надежно закреплены для минимизации или исключения случайных вибраций, вызванных относительным перемещением элемента относительно инструментальной платформы 1201.
[00165] Некоторые компоненты, установленные на инструментальной платформе 1201, могут быть размещены в отсеке электронного оборудования с электромагнитным экранированием (например, в отсеке 170, показанном на Фигуре 1C). Экранированный отсек электронного оборудования и компоненты, находящиеся в нем, могут образовывать компенсирующий вес для датчиков векторных составляющих, так что инструментальная платформа, включающая в себя датчики и вспомогательное оборудование, может быть лишь слегка утяжелена в нижней части. В варианте выполнения экранированный отсек электронного оборудования может быть установлен в верхней цилиндрической части инструментальной платформы, и датчики векторных составляющих (например, датчики 146 или 840, показанные на Фигурах 1B и 9) могут быть установлены в нижней части инструментальной платформы.
[00166] Вспомогательные датчик (датчики) и системы 1204, показанные на Фигуре 12, также могут содержать трехкомпонентный векторный магнитометр статического поля. Трехкомпонентный векторный магнитометр статического поля может зондировать статическое магнитное поле Земли. Трехкомпонентный векторный магнитометр статического поля может представлять собой связанный по постоянному току векторный магнитометр и может представлять собой магнитометр, отличный от ЭМ-датчика, который может представлять собой связанный по переменному току датчик. Например, ЭМ-датчик может содержать индукционный магнитометр с отсечкой низких частот на 1 Гц и минимальным уровнем шума 1 пТл/кв. корень из Гц на 1 Гц. Трехкомпонентный векторный магнитометр статического поля может представлять собой феррозондовый магнитометр, выполненный с возможностью зондирования статического магнитного поля с минимальным уровнем шума 10 пТл/кв. корень из Гц на 1 Гц.
[00167] Вспомогательные датчик (датчики) и система 1204 могут содержать высокоточный трехкомпонентный акселерометр, расположенный вблизи воздушной опоры, например, акселерометр 164, проиллюстрированный на Фигуре 1C.
[00168] Система 1208 фиксации является дополнительной и может использоваться для блокировки инструментальной платформы в фиксированном положении относительно узла основания (и/или опорной стойки, на которой установлена сферическая опора), пока сбор электромагнитных данных не ведется. Система 1208 фиксации может приводиться в действие сжатым воздухом и может получать команды фиксации и освобождения инструментальной платформы от первого контроллера 1210. Система 1208 фиксации может быть установлена на верхней поверхности опорной стойки (например, столба 144, 710 или 810, показанного на Фигурах 1B, 7, 8 и 9). Система 1208 фиксации может содержать пневматические зажимы, которые выступают вверх от столба для зацепления инструментальной платформы 1201 и фиксации ее в определенном положении.
[00169] Варианты выполнения не ограничиваются конкретной конфигурацией системы 1200, показанной на Фигуре 12. Например, в некоторых вариантах выполнения для управления всеми элементами системы может использоваться один контроллер. Один или более вспомогательных датчиков и систем 1204, система 1206 выравнивания и система 1208 фиксации могут быть исключены. Подобным образом, из системы 1200 может быть исключено устройство 1216 записи данных, и данные могут передаваться во внешнюю базу данных для хранения. Также возможны другие изменения.
[00170] Система 1206 выравнивания, показанная на Фигуре 12, может использоваться для передачи крутящего момента на инструментальную платформу, что вызывает ее вращение вокруг центра вращения. Система выравнивания может включать в себя свой собственный контроллер (не показан), который может содержать процессор и/или память. В других вариантах выполнения управление системой выравнивания может быть реализовано первым контроллером 1210.
[00171] Передаваемый крутящий момент может менять ориентацию инструментальной платформы или ее угловую скорость. В этом варианте выполнения система 1206 выравнивания расположена на инструментальной платформе 1201 и получает команды от первого контроллера 1210. Однако также возможны другие расположения.
[00172] Система 1206 выравнивания может содержать вентиляторы или другие средства приведения в движение воздуха для создания тяги. Приведение в движение воздуха может создавать крутящий момент вокруг центра вращения, вызывая вращение инструментальной платформы 1201. Система 1206 выравнивания может содержать средство для приведения в движение воздуха в трех независимых угловых направлениях и может содержать средство для обеспечения прямой или обратной тяги в каждом из этих направлений. Система 1206 выравнивания может содержать три независимо ориентированных реверсивных вентилятора (например, 654a, 654b и 654c, показанные на Фигуре 6B), или она может содержать вентилятор, который может поворачиваться для направления тяги в конкретном направлении. Система 1206 выравнивания может содержать вентилятор, прикрепленный к инструментальной платформе, который может направлять воздух через подвижные каналы, жалюзи или лопатки, так что направление его тяги может меняться.
[00173] В дополнение или альтернативно система 1206 выравнивания может содержать подвижную массу. Положение подвижной массы может регулироваться для изменения гравитационного крутящего момента, действующего на инструментальную платформу. Гравитационный крутящий момент может меняться для противодействия маятниковому движению инструментальной платформы. В варианте выполнения гравитационные крутящие моменты могут непрерывно регулироваться при сборе данных для ослабления маятникового движения инструментальной платформы.
[00174] В одном варианте выполнения система 1206 выравнивания содержит вентиляторы, расположенные в верхней части инструментальной платформы для обеспечения тяги в трех независимых угловых ориентациях. Система выравнивания может работать периодически при наклоне инструментальной платформы достаточно близко к предельному углу наклона (например, углу α, показанному на Фигуре 7), и/или перед началом сбора ЭМ или других данных векторных составляющих для размещения инструментальной платформы вертикально и с небольшой угловой скоростью.
[00175] В некоторых вариантах выполнения система, описанная в настоящем документе, используется для аэроэлектромагнитной съемки. Инструментальная платформа 1201 может достаточно долго совершать свободное маятниковое движение относительно столба, на котором установлена сферическая опора, для завершения одного маршрута полета для ЭМ-съемки. Во время перехода с маршрута на маршрут при съемке или при наклоне инструментальной платформы чрезмерно близко к столбу, инструментальная платформа 1201 может возвращаться в вертикальное положение системой 1206 выравнивания. При выравнивании инструментальной платформы 1201 главная ось инструментальной платформы 1201 может перемещаться в пространственное положение, которое приблизительно параллельно оси столба с угловой скоростью, близкой к нулевой. Во время вращения инструментальной платформы 1201 системой 1206 выравнивания сбор электромагнитных данных может быть приостановлен, поскольку работа системы выравнивания может вызывать чрезмерно высокий электромагнитный или вибрационный шум движения.
[00176] Система 1206 выравнивания может содержать систему измерения углового движения. Система измерения углового движения может содержать контроллер и средство углового измерения для обнаружения углового движения инструментальной платформы 1201. Система измерения углового движения может отслеживать угловое расположение инструментальной платформы в отношении ее угла наклона и/или отслеживать ее угловую скорость. Средство углового измерения для обнаружения углового движения инструментальной платформы может содержать связанный по постоянному току векторный магнитометр, датчики наклона, акселерометры, гироскопы угловой скорости и/или датчики скорости вращения, прикрепленные к инструментальной платформе 1201. В варианте выполнения контроллер системы 1206 выравнивания может принимать сигналы от средства углового измерения. Контроллер может вычислять наклон инструментальной платформы 1201 и управлять системой 1206 выравнивания. Контроллер может подавать команды системе 1206 выравнивания для переориентирования инструментальной платформы 1201 или существенного уменьшения ее углового движения. В альтернативном варианте выполнения система измерения углового движения может входить во вспомогательные датчики и системы 1204, а не в систему 1206 выравнивания.
[00177] В некоторых вариантах выполнения один или более компонентов устройства, описанного в настоящем документе, могут быть выполнены из высокорезистивных и магнитно-непроницаемых материалов для снижения электромагнитного шума, который может возникать из-за индукции вихревого тока и намагничивания. Электронные компоненты могут быть экранированы мю-металлом или другими высокопроницаемыми или проводящими материалами для подавления электромагнитного шума, предотвращая его влияние на измерения данных ЭМ-съемки. Высокорезистивные и магнитно-непроницаемые материалы, которые могут быть использованы, включают в себя, но не ограничиваются, композиты из углеродного волокна, стекловолокна или натурального волокна, арамиды, пластики, дерево, резину, керамику и стекло.
[00178] Фигура 13 представляет собой блок-схему способа сбора данных с подвижной инструментальной платформы, имеющей по меньшей мере один датчик векторных составляющих, прикрепленный к ней, в соответствии с некоторыми вариантами выполнения.
[00179] На этапе 1302 перемещают устройство, содержащее инструментальную платформу (включающую в себя датчик векторных составляющих). Устройство может быть аналогично любому из вышеописанных примерных вариантов выполнения, содержащих: узел основания; сферическую опору, установленную на узле основания; и инструментальную платформу, установленную на сферической опоре. Инструментальная платформа утяжелена в нижней части в том смысле, что она имеет центр масс, расположенный под центром вращения. Устройство также может содержать носитель (например, носитель 101, показанный на Фигурах 1A, 1B и 1D).
[00180] Перемещение устройства может содержать буксировку устройства с помощью транспортного средства, установку устройства на движущееся транспортное средство или другое движущееся тело или транспортировку устройства, в качестве нескольких примеров.
[00181] На этапе 1304 во время перемещения устройства собирают данные векторных составляющих с использованием по меньшей мере одного датчика векторных составляющих.
[00182] В некоторых вариантах выполнения на инструментальной платформе установлен высокоточный трехкомпонентный акселерометр (например, акселерометр 164, показанный на Фигуре 1C), расположенный смежно со сферической опорой. В качестве математической зависимости для вычисления углового движения при биении на основе измеренного ускорения может использоваться передаточная функция. Затем на основе уравнений шума движения может быть вычислен шум биения.
[00183] Фигура 14 представляет собой блок-схему примерного способа, реализуемого в вышеописанном устройстве, для корректировки шума биения в соответствии с некоторыми вариантами выполнения. Способ может выполняться контроллером, например, первым контроллером 1210, показанным на Фигуре 12, или любым другим подходящим средством обработки данных.
[00184] На этапе 1402 получают данные об ускорении от акселерометра.
[00185] На этапе 1404 оценивают шум биения в зависимости от данных об ускорении. Эта оценка может содержать вычисление вращательного движения на основе входных данных от высокоточного трехкомпонентного акселерометра. Таким образом, шум биения может оцениваться на основе уравнений шума движения с использованием вычисленного углового изменения и измеренного статического магнитного поля Земли. Статическое магнитное поле Земли может, например, быть получено от трехкомпонентного связанного по постоянному току векторного магнитометра, прикрепленного к инструментальной платформе.
[00186] На этапе 1406 удаляют оцененный шум биения из данных датчика векторных составляющих, что может обеспечивать улучшенное измерение с уменьшенным шумом движения.
[00187] В некоторых вариантах выполнения шум движения может быть дополнительно снижен путем измерения угловых движений инструментальной платформы и соответственной корректировки ЭМ-данных датчика. Устройство может содержать магнитометр векторных составляющих статического поля и датчик измерения углового движения, установленные на инструментальной платформе. Один из способов, которые могут быть использованы, заключается в первоначальном вычислении шума движения с помощью уравнений шума вращательного движения,
Nc=m⋅(ω×B),
Nm=m⋅(ΔΘ×B), или
N=m⋅(A×F).
[00188] И последующем удалении вычисленного шума из данных. Контроллер устройства может, например, оценивать шум движения на основе данных, принятых от средства определения пространственного положения и датчика измерения углового движения. Однако на практике в случае ЭМ-данных непосредственные угловые измерения не являются достаточно точными для точной оценки шума по меньшей мере для разрешения порядка пикоТесла в полосе частот ниже 20 Герц с использованием доступного в настоящее время контрольно-измерительного оборудования и подхода, связанного с передаточной функцией, или других математических средств, и вместо использования непосредственного углового измерения может потребоваться вычисление углового движения на основе измерений ускорения.
[00189] Следует понимать, что в некоторых вариантах выполнения может быть реализовано сочетание более чем одного из вышеописанных подходов. Варианты выполнения не ограничиваются каким-либо конкретным одним или несколькими подходами, способами или устройствами, раскрытыми в настоящем документе. Специалистам в данной области техники будет понятно, что изменения вариантов выполнения, описанных в настоящем документе, могут быть выполнены в различных реализациях без отклонения от объема изобретения. В связи с этим следует понимать, что в пределах объема приложенной формулы изобретения изобретение может быть реализовано на практике иначе, чем конкретно описано.
[00190] Вышеприведенное описание просто иллюстрирует применение принципов изобретения. Специалистами в данной области техники могут быть реализованы другие конструкции и способы без отклонения от объема настоящего изобретения.
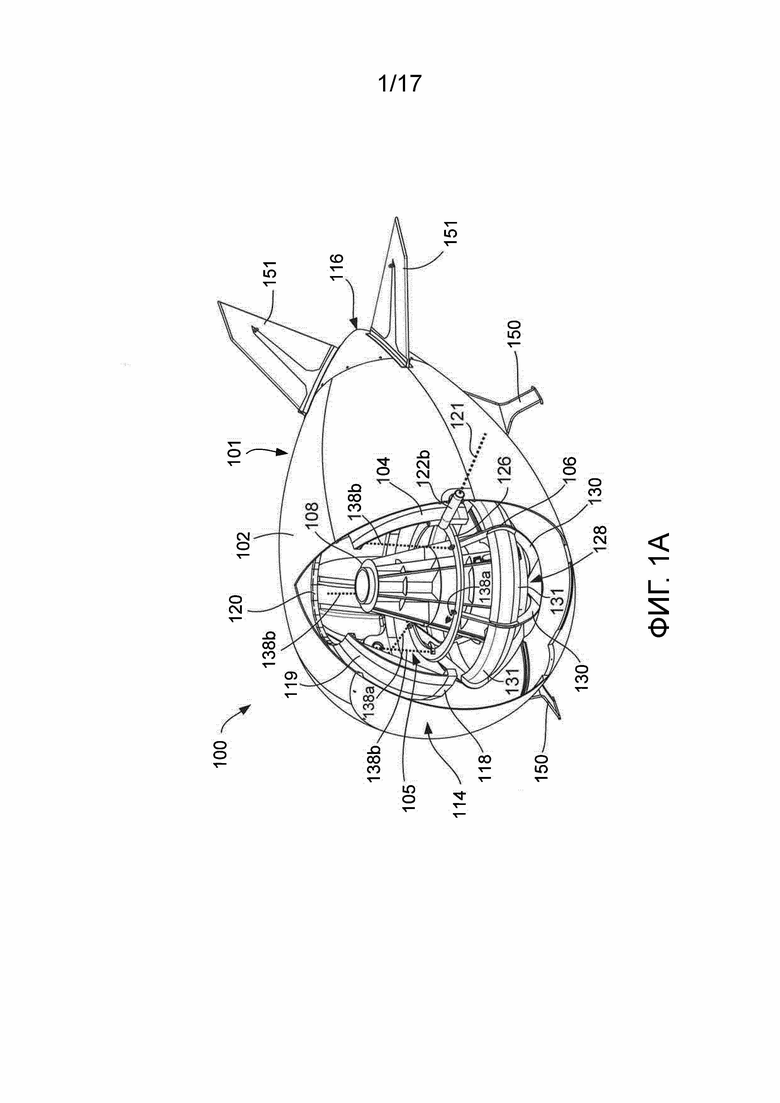
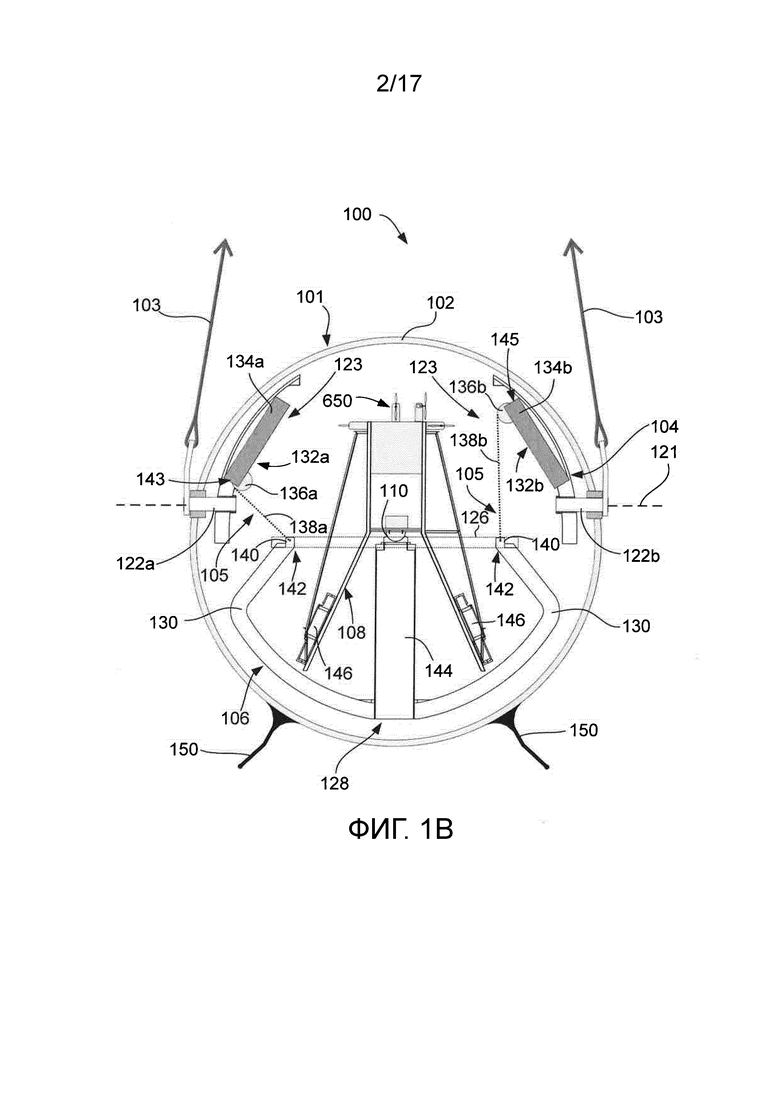
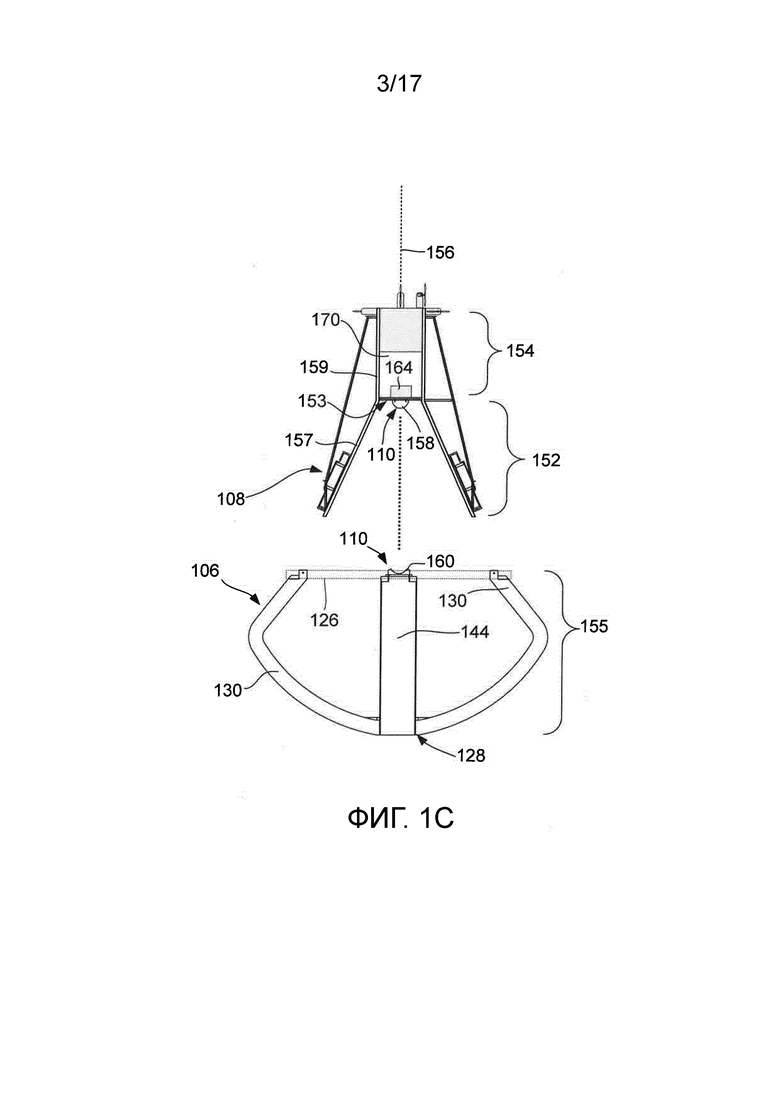
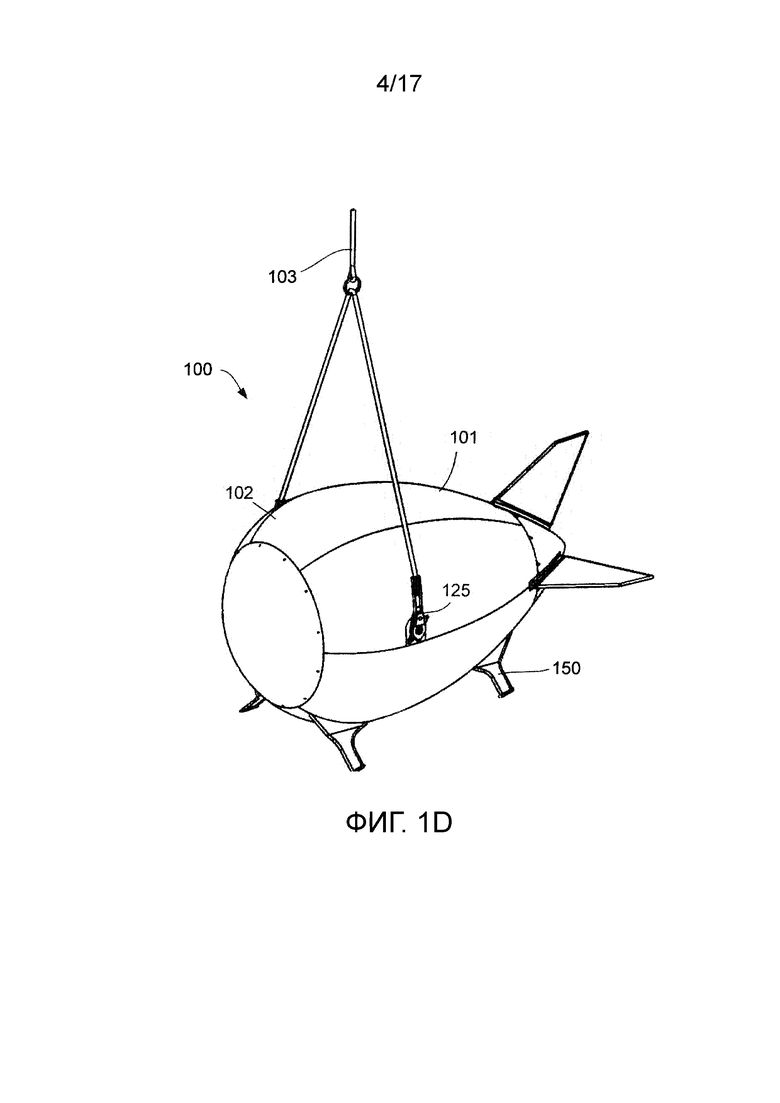
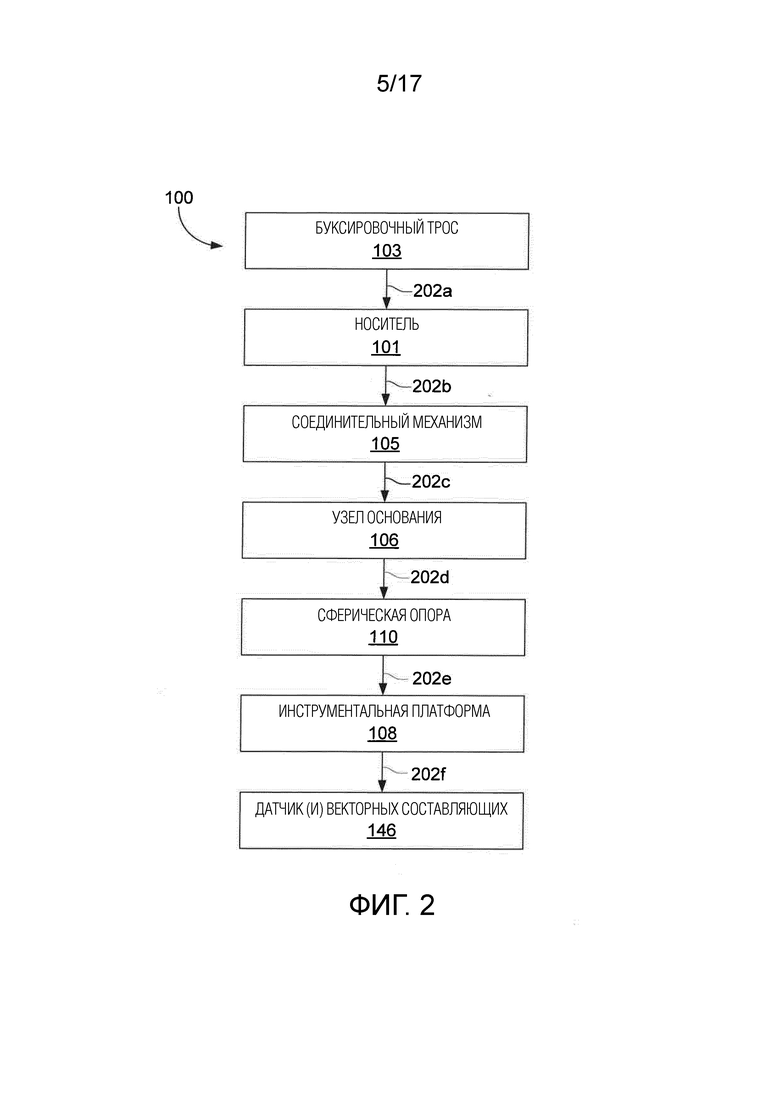
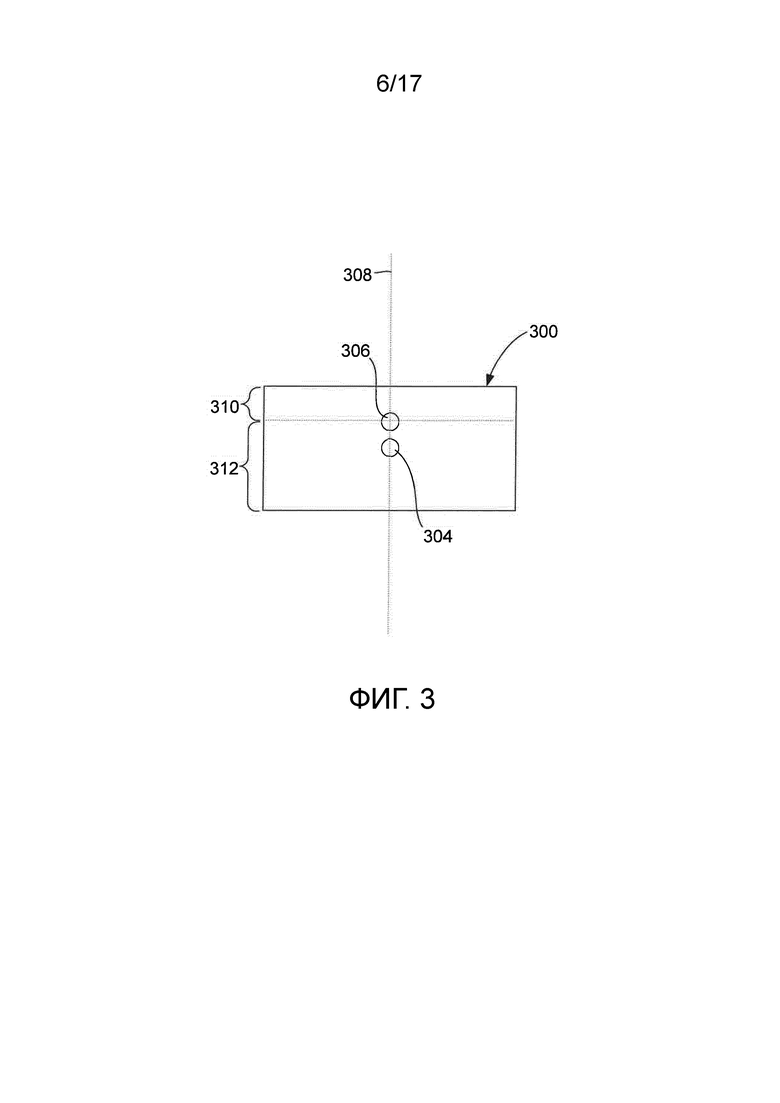
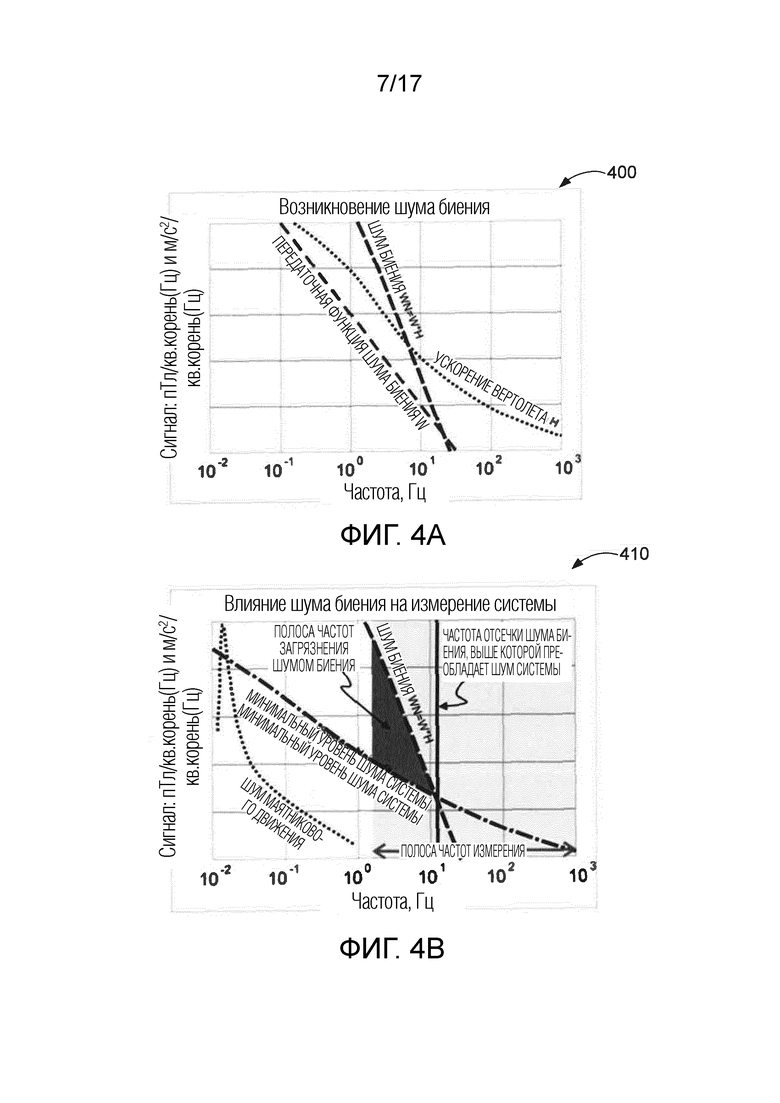
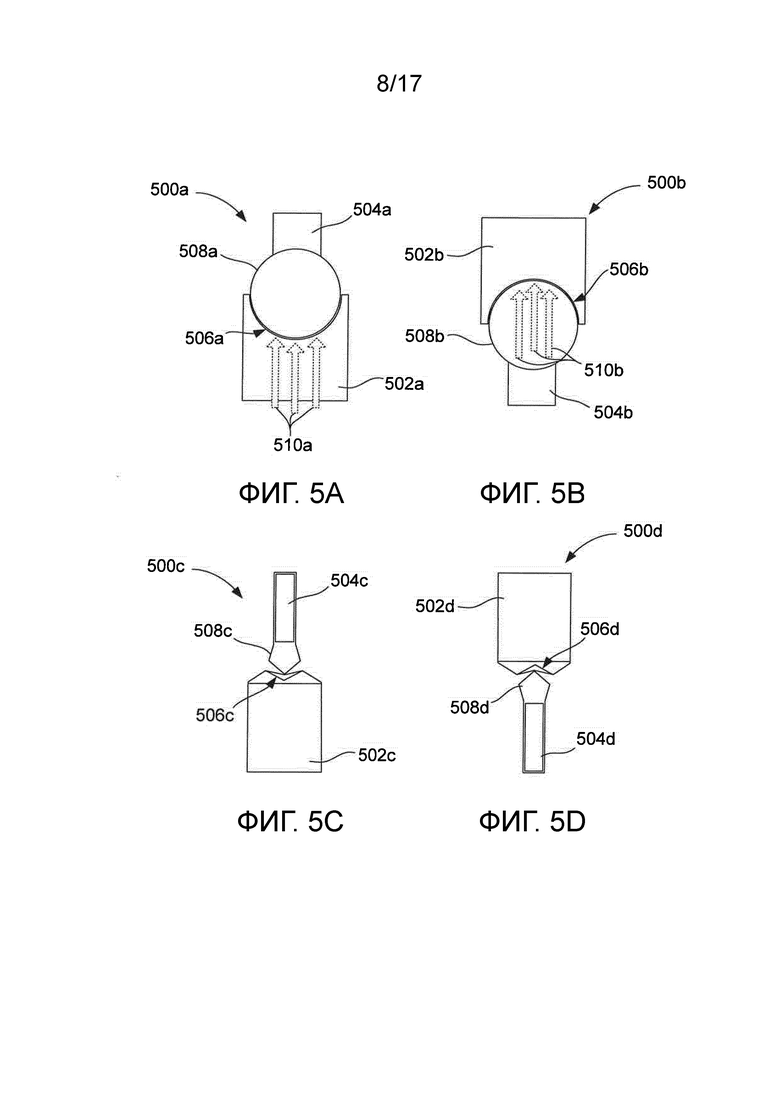
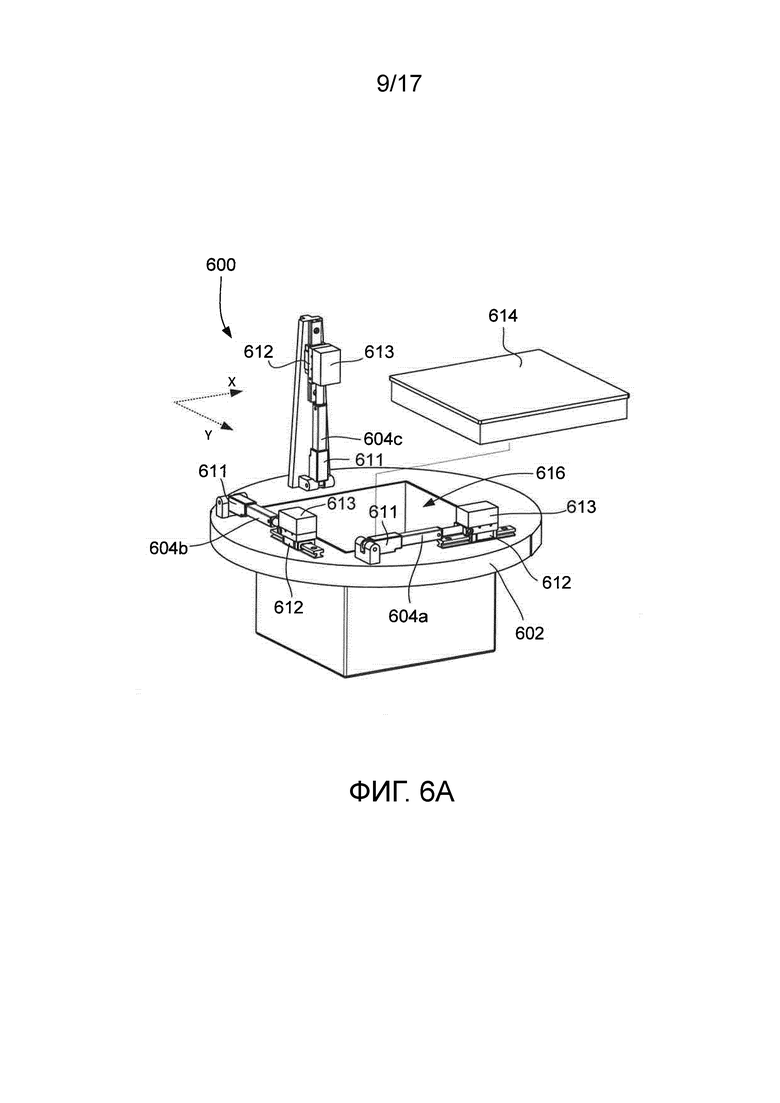
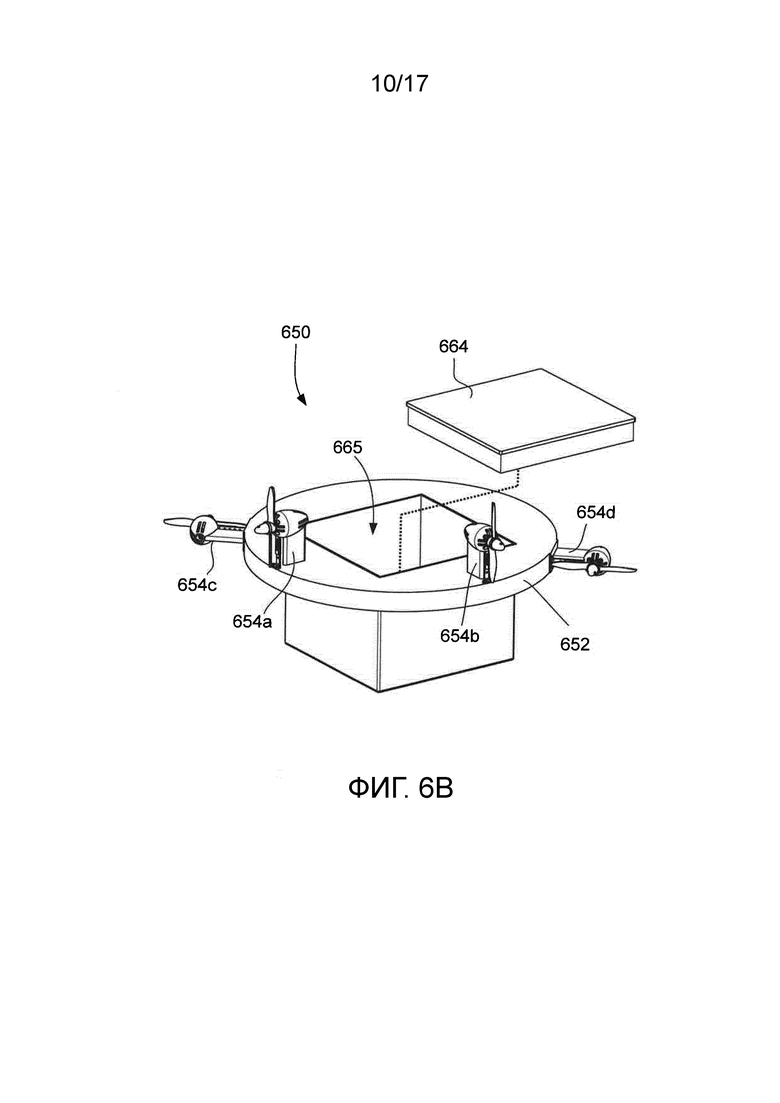
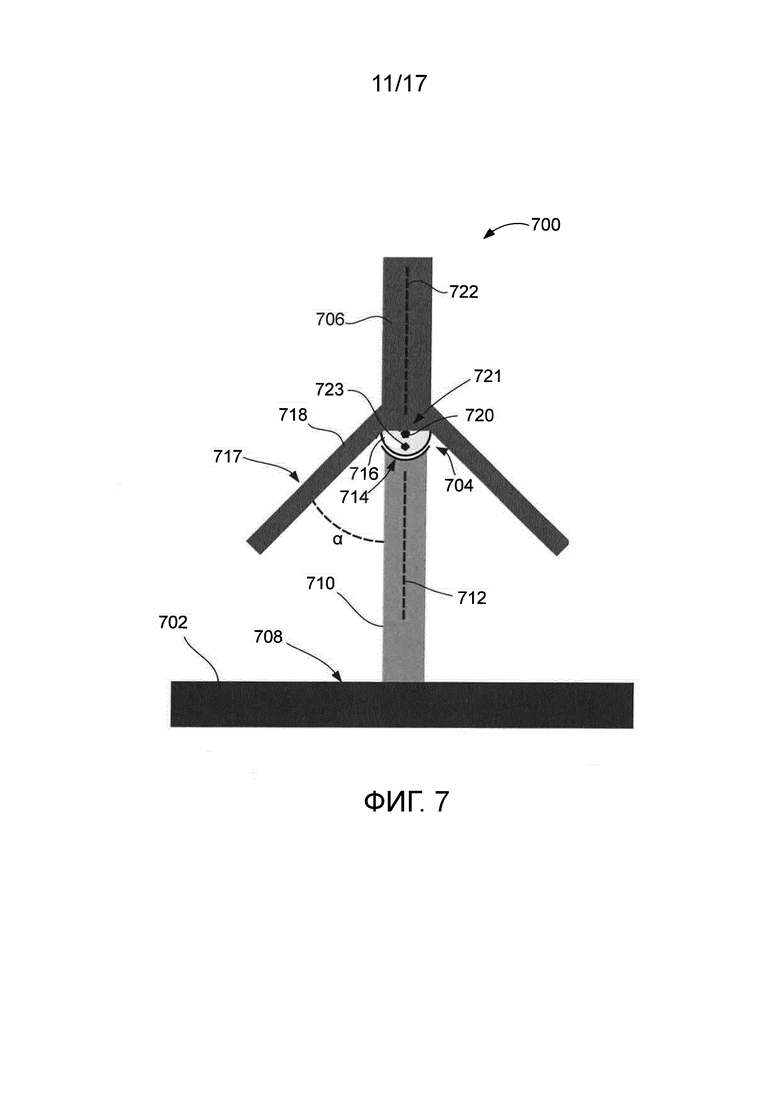
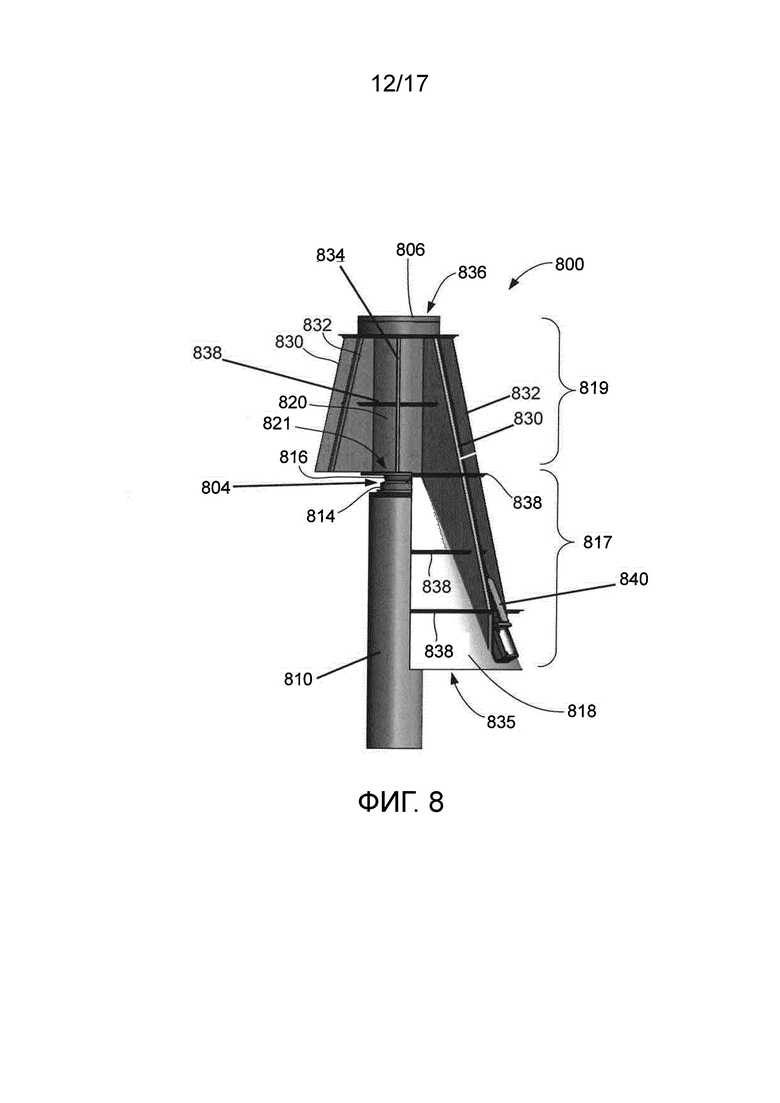
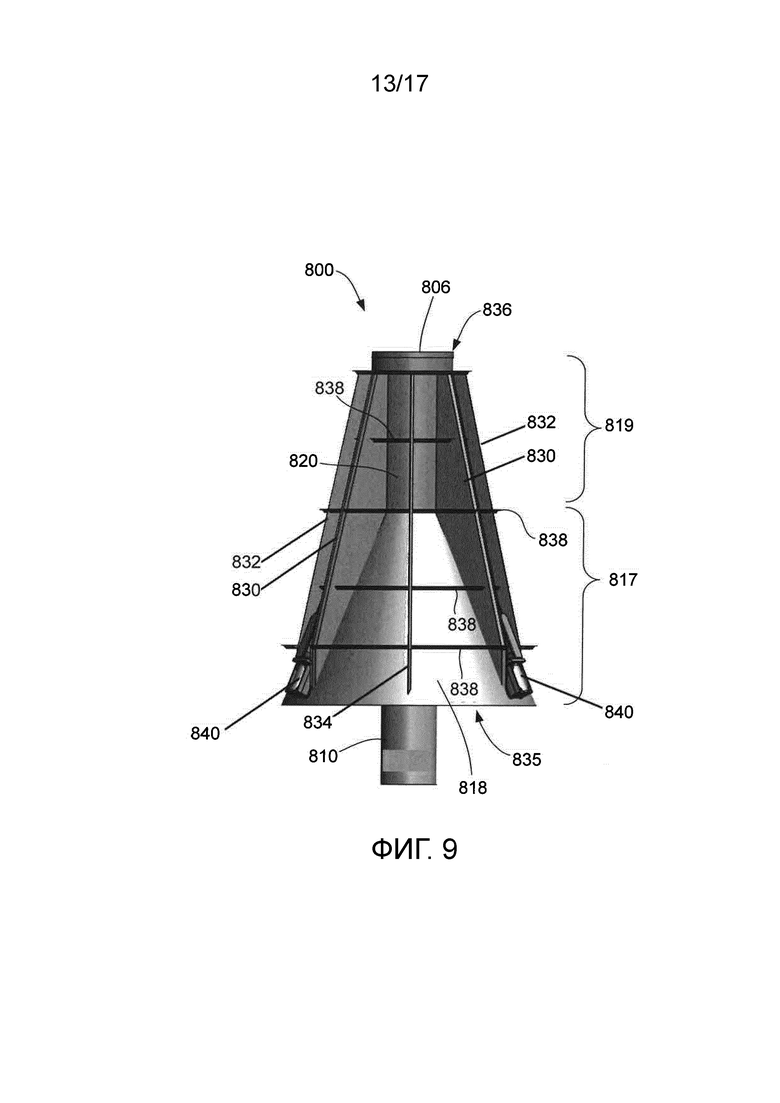
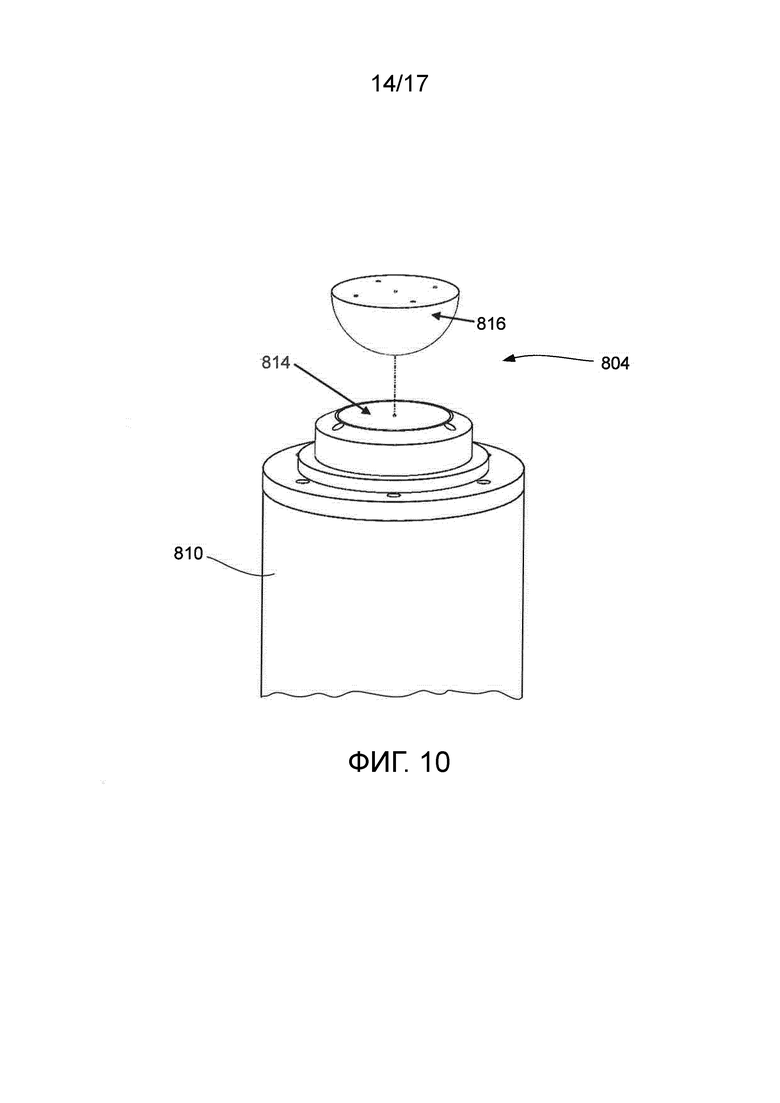
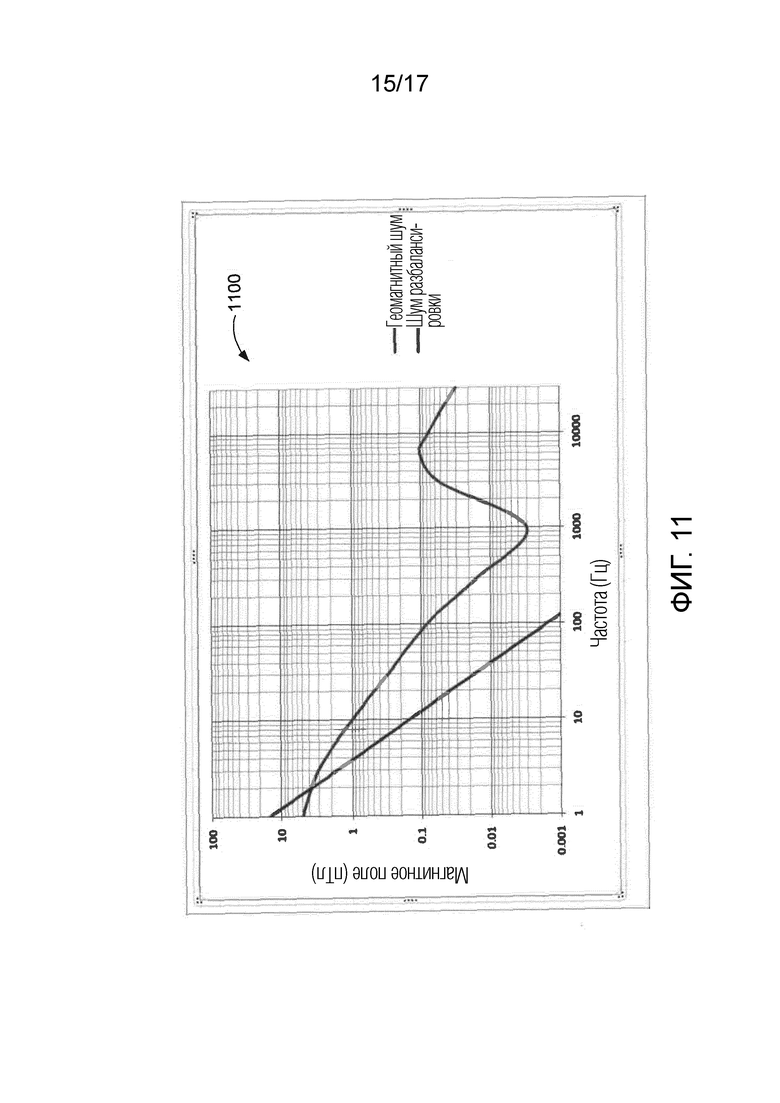
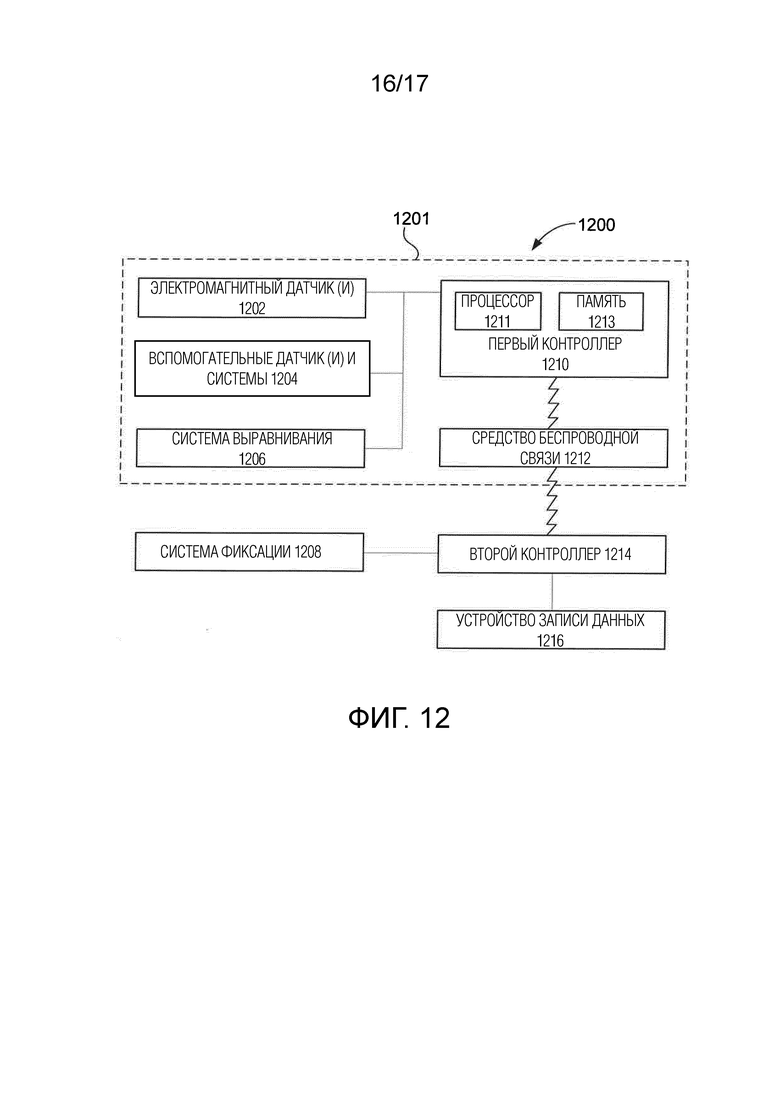
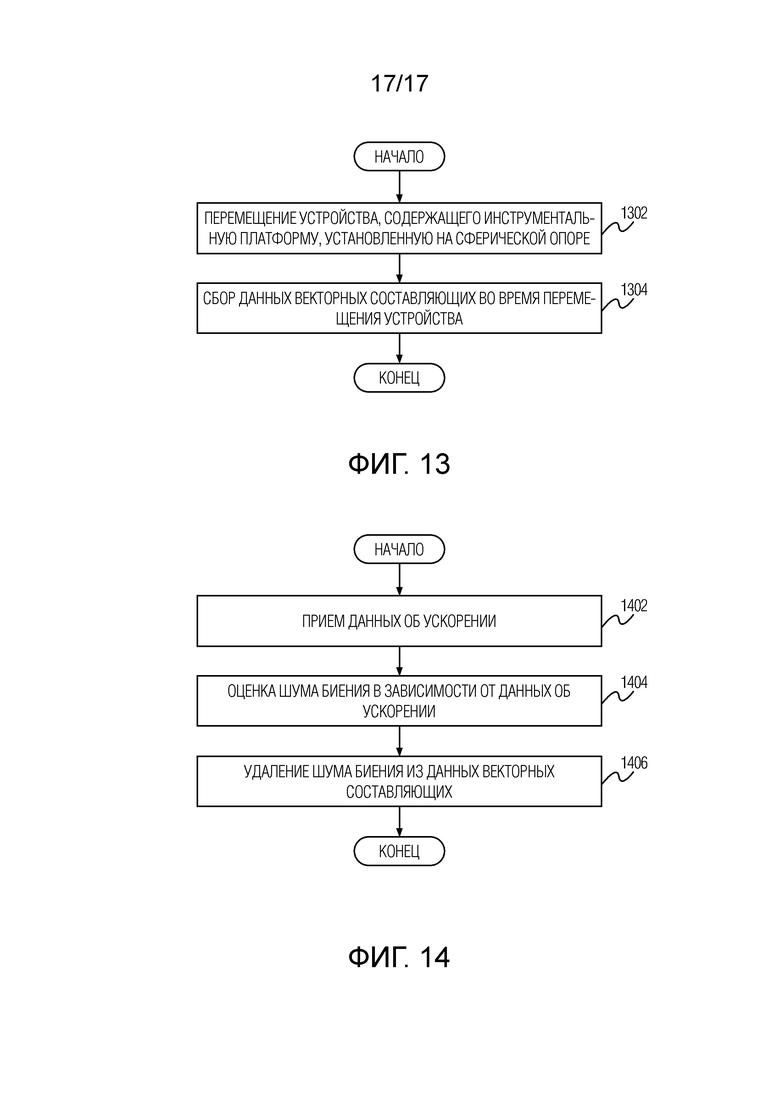
Группа изобретений относится к сбору данных векторных составляющих. Устройство сбора данных векторных составляющих содержит сферическую опору, установленную на узле основания, и инструментальную платформу, имеющую по меньшей мере один датчик векторных составляющих, прикрепленный к ней. Инструментальная платформа установлена на сферической опоре и поддерживается ей. Сферическая опора соединяет инструментальную платформу с узлом основания и позволяет свободное угловое вращение инструментальной платформы в пределах диапазона угла наклона. Инструментальная платформа имеет центр масс, расположенный под центром вращения. Технический результат – повышение точности сбора геофизических данных векторных составляющих. 2 н. и 23 з.п. ф-лы, 14 ил.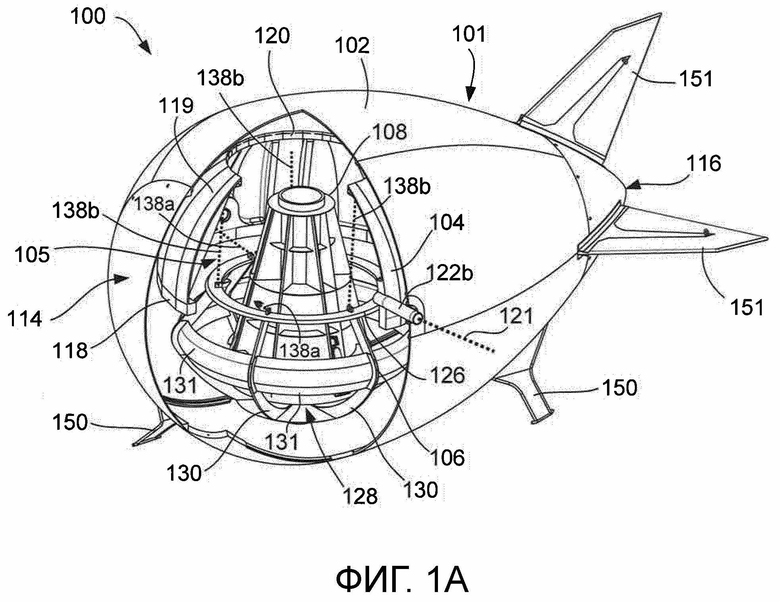
1. Устройство сбора данных векторных составляющих, содержащее:
узел основания;
сферическую опору, установленную на узле основания;
инструментальную платформу, имеющую по меньшей мере один датчик векторных составляющих, прикрепленный к ней, причем инструментальная платформа установлена на сферической опоре и поддерживается ею, в результате чего сферическая опора соединяет инструментальную платформу с узлом основания и позволяет свободное угловое вращение инструментальной платформы, в пределах диапазона угла наклона, вокруг сферической опоры, так что инструментальная платформа имеет центр вращения;
причем инструментальная платформа имеет центр масс, расположенный под центром вращения.
2. Устройство по п. 1, в котором инструментальная платформа выполнена с возможностью маятникового движения вокруг центра вращения, так что подавляется шум движения в пределах полосы частот сбора данных по меньшей мере одного датчика векторных составляющих.
3. Устройство по п. 1, в котором инструментальная платформа имеет собственную частоту маятникового движения, которая ниже наименьшей частоты полосы частот сбора данных по меньшей мере одного датчика векторных составляющих.
4. Устройство по любому из пп. 1-3, в котором инструментальная платформа является жесткой.
5. Устройство по любому из пп. 1-4, дополнительно содержащее носитель, причем узел основания соединен с носителем.
6. Устройство по п. 5, в котором носитель содержит буксировочную раму и соединительный механизм, соединяющий узел основания с буксировочной рамой.
7. Устройство по п. 5 или 6, в котором носитель представляет собой воздушный носитель, выполненный с возможностью буксировки воздушным транспортным средством.
8. Устройство по любому из пп. 1-7, в котором сферическая опора представляет собой воздушную опору.
9. Устройство по любому из пп. 1-8, в котором сферическая опора содержит единственное механическое соединение между узлом основания и инструментальной платформой.
10. Устройство по любому из пп. 1-9, в котором указанный по меньшей мере один датчик векторных составляющих включает в себя три независимо ориентированных датчика векторных составляющих.
11. Устройство по любому из пп. 1-10, дополнительно содержащее контроллер, содержащий процессор и память, причем контроллер принимает данные от указанного по меньшей мере одного датчика.
12. Устройство по п. 11, в котором контроллер сохраняет принятые данные.
13. Устройство по п. 11 или 12, дополнительно содержащее средство беспроводной связи, причем контроллер побуждает средство беспроводной связи к передаче принятых данных для сохранения в базе данных.
14. Устройство по любому из пп. 1-13, в котором узел основания содержит опорную стойку, причем сферическая опора установлена на опорной стойке.
15. Устройство по п. 14, в котором опорная стойка содержит столб, проходящий вверх от узла основания.
16. Устройство по любому из пп. 1-15, в котором указанный по меньшей мере один датчик векторных составляющих включает в себя по меньшей мере одно из следующего:
по меньшей мере один электромагнитный датчик;
по меньшей мере один гравиметрический датчик.
17. Устройство по любому из пп. 1-16, в котором указанный по меньшей мере один датчик векторных составляющих содержит по меньшей мере один градиентометрический датчик.
18. Устройство по любому из пп. 1-17, в котором инструментальная платформа содержит обращенную вниз юбку, причем обращенная вниз юбка обеспечивает зазор вокруг сферической опоры и узла основания, обеспечивающий диапазон наклонного вращения инструментальной платформы в пределах диапазона угла наклона.
19. Устройство по любому из пп. 1-18, дополнительно содержащее:
систему выравнивания; и
систему измерения углового движения,
причем система выравнивания в зависимости от углового движения, измеренного системой измерения углового движения, подает выравнивающие крутящие моменты на инструментальную платформу, вызывая ее вращение вокруг сферической опоры.
20. Устройство по п. 19, в котором система выравнивания содержит одно из следующего:
множество движителей, расположенных на инструментальной платформе, причем движители создают указанные выравнивающие крутящие моменты; и
множество узлов подвижных масс, расположенных на инструментальной платформе, причем узлы подвижных масс создают указанные выравнивающие крутящие моменты.
21. Устройство по п. 19 или 20, в котором выравнивающие крутящие моменты создаются по меньшей мере для одного из следующего:
ориентации утяжеленной в нижней части инструментальной платформы так, чтобы ее главная ось была расположена по существу вертикально; и
уменьшения угловой скорости.
22. Устройство по любому из пп. 1-21, дополнительно содержащее акселерометр, расположенный на инструментальной платформе, причем акселерометр измеряет данные об ускорении, а контроллер выполнен с возможностью:
приема данных об ускорении;
оценки шума биения в зависимости от данных об ускорении;
и удаления шума биения из данных, полученных от указанного по меньшей мере одного датчика векторных составляющих.
23. Способ сбора данных векторных составляющих с подвижной инструментальной платформы, имеющей по меньшей мере один датчик векторных составляющих, прикрепленный к ней, причем способ содержит этапы, на которых:
перемещают устройство, содержащее: узел основания; сферическую опору, установленную на узле основания; и инструментальную платформу, причем инструментальная платформа установлена на сферической опоре и поддерживается ею, в результате чего сферическая опора соединяет инструментальную платформу с узлом основания и позволяет свободное угловое вращение инструментальной платформы, в пределах диапазона угла наклона, вокруг сферической опоры, так что инструментальная платформа имеет центр вращения, причем инструментальная платформа имеет центр масс, расположенный под центром вращения; и
во время перемещения устройства собирают данные векторных составляющих с использованием указанного по меньшей мере одного датчика векторных составляющих.
24. Способ по п. 23, в котором устройство дополнительно содержит носитель, причем узел основания соединен с носителем, и
этап перемещения устройства включает в себя буксировку носителя.
25. Способ по п. 23 или 24, в котором инструментальная платформа выполнена с возможностью маятникового движения вокруг центра вращения, так что подавляется шум движения в пределах полосы частот сбора данных указанного по меньшей мере одного датчика векторных составляющих.
| US 2011175604 A1, 21.07.2011 | |||
| US 6369573 B1, 09.04.2002 | |||
| WO 2015103608 A1, 09.07.2015 | |||
| Устройство для буксировки измерителя магнитного поля | 1990 |
|
SU1770930A1 |

