Изобретение относится к космонавтике, в частности к области управления космическим аппаратом (КА), располагающим аэродинамическим качеством, при спуске в атмосфере, обеспечивающим снижение максимальных перегрузок, действующих на КА в процессе аэродинамического торможения в атмосфере.
При спуске КА в атмосфере Земли и планет одной из важнейших задач является минимизация максимальных перегрузок, действующих на КА в процессе снижения. Расширение спектра задач спускаемых аппаратов, в первую очередь связанных с их маневрированием в атмосфере, предопределяет необходимость разработки эффективных методов снижения перегрузочных режимов, т.к. чрезвычайно большие пиковые перегрузки могут привести к потерям управляемости КА и, как следствие, к срыву выполнения целевых задач космических экспедиций.
Известен ряд способов управления КА аэродинамическим качеством при снижении в атмосфере. Так, достаточно простым в реализации является способ управления, состоящий в движении КА с максимальным значением эффективного аэродинамического качества: Кэф=Kбcosγ, где Кб - балансировочное аэродинамическое качество, установленное на заданном угле атаки α, γ - угол крена, устанавливаемый равным нулю для обеспечения максимума Кэф. Этот способ описан в работе - Иванов Н.М., Мартынов А.И., Соколов Н.Л. «О выборе основных проектно-баллистических характеристик и способа управления КА планирующего типа, предназначенных для спуска на поверхность Марса». Космические исследования, 1977 г., т. 15, вып. 1, стр. 42-52 - [1]. Использование такого способа обеспечивает достаточно низкие значения продольной составляющей перегрузки nx, действующей на КА:
 ,
,
где ρ - плотность атмосферы;
V - скорость космического аппарата;
Cx - аэродинамический коэффициент лобового сопротивления;
S - площадь миделева сечения;
m - масса космического аппарата;
g - ускорение свободного падения.
Вместе с тем данный способ имеет существенные недостатки, связанные с отсутствием возможности оперативного изменения управляющих параметров при полете КА в атмосфере. Во-первых, его осуществление не предусматривает внесения необходимых корректив в программу управления КА для снижения максимальных перегрузок. Во-вторых, реализация такого способа для КА с большими значениями аэродинамического качества может привести к вылету аппарата из атмосферы после рикошета в плотных слоях атмосферы и, следовательно, к невозможности осуществления посадки в заданном районе.
Известен способ управления, предусматривающий одноразовое переключение эффективного аэродинамического качества Кэф с максимального по модулю отрицательного значения на максимальное положительное, описанный в работе - Иванов Н.М., Мартынов А.И. «Движение космических летательных аппаратов в атмосферах планет». M.: Наука, 1985, стр. 94-99 - [2]. Этот способ позволяет путем выбора момента переключения регулировать максимальную величину перегрузки, а также предотвратить вылет КА из атмосферы и обеспечить посадку в заданном районе. Однако применение данного способа не позволяет обеспечить существенное снижение максимальной полной перегрузки, особенно для КА, располагающих большим аэродинамическим качеством (например, КА планирующего и самолетного типов). Действительно, максимальная полная перегрузка, рассчитываемая по формуле (см. [2]):

может достигать больших величин за счет значительной боковой составляющей ny. Таким образом, значительный резерв в снижении максимума полной перегрузки может быть связан с уменьшением эффективного аэродинамического качества в процессе достижения КА плотных слоев атмосферы.
Наиболее близким по совокупности существенных признаков и достигаемому результату к заявляемому способу является способ управления КА, описанный в работе - Константинов Н.С., Каменков Е.Ф., Перелыгин Б.П., Безвербый В.К., под редакцией Мишина В.П. «Механика космического полета». М.: Машиностроение, 1989, стр. 371-378 - [3]. Данный способ предусматривает движение КА с нулевым значением угла крена γ и с постоянным значением балансировочного качества 


Способ-прототип позволяет уменьшить nmax по сравнению со способами-аналогами за счет рационального выбора
Задачами, на решение которой направлено изобретение, является устранение указанных недостатков.
Технический результат изобретения заключается в снижении максимальных значений полной перегрузки, что позволяет повысить устойчивость управления космическими аппаратами, снизить требования к прочностным характеристикам элементов конструкции КА и оптимизировать массово-габаритный баланс при компоновке спускаемых аппаратов.
Сущность заявленного способа управления космическим аппаратом аэродинамическим качеством при спуске в атмосфере заключается в следующем. Осуществляется вход в атмосферу с максимальным эффективным аэродинамическим качеством Кэфmax, т.е. с максимальным балансировочным аэродинамическим качеством Кбmax и с нулевым углом крена γ=0. В процессе всего полета КА в атмосфере измеряют текущие траекторные параметры движения КА: скорость полета Vi, угол наклона скорости к местному горизонту θi, высоту полета hi, угол между проекцией вектора скорости на местный горизонт и местной параллелью εi, широту подспутниковой точки полета КА φi, а также плотность атмосферы ρi, где i=1, 2, 3 …, n - интервалы измерений текущих координат движения КА, где n - конечный интервал измерения координат движения до выхода КА на изовысотный участок.
Сразу после входа КА в атмосферу его скорость начинает несколько возрастать, т.к. силы гравитации увеличиваются по мере приближения аппарата к притягивающему центру, а аэродинамические силы достаточно малы в связи с малой плотностью верхних слоев атмосферы. Далее в процессе уменьшения высоты полета аэродинамическое сопротивление начинает интенсивно возрастать, скорость полета КА сначала замедляет свой рост, затем после прохождения своего максимума начинает снижаться и достигает начального значения V0 (скорость входа КА в атмосферу). На начальном участке полета перегрузка, действующая на КА, достаточно мала, что не приводит к необходимости внесения корректив в программу управления КА. Затем, при Vi<V0, перегрузка начинает интенсивно возрастать, и для снижения темпа ее роста (в первую очередь боковой составляющей ny) устанавливают аэродинамическое качество

 ,
,
где 
ri=hi+R;
θ0 - траекторный угол входа космического аппарата в атмосферу;
V0 - скорость входа космического аппарата в атмосферу;
Vi - скорость полета космического аппарата на i-м интервале измерения;
hi - высота полета космического аппарата на i-м интервале измерения;
ri - радиус-вектор, соединяющий центр притяжения планеты и центра масс космического аппарата на i-м интервале измерения;
εi - угол между проекцией вектора скорости на местный горизонт и местной параллелью на i-м интервале измерения;
ρi - плотность атмосферы на текущей высоте полета космического аппарата hi на i-м интервале измерения,
i=1, 2, …, n;
n - конечный интервал измерения координат движения до выхода КА на изовысотный участок;
Px - приведенная нагрузка на лобовую поверхность;
g - ускорение силы тяжести;
ω - угловая скорость вращения планеты;
ρ0 - плотность атмосферы на поверхности планеты;
β - логарифмический коэффициент изменения плотности атмосферы по высоте.
Анализ уравнения для расчета

На этом участке полета полная перегрузка достигает максимальной величины. При этом путем установления расчетных значений



где rи=hи+R;
γ - угол крена космического аппарата;
Px - приведенная нагрузка на лобовую поверхность;
g - ускорение силы тяжести;
ω - угловая скорость вращения планеты;
ρи - плотность атмосферы при полете космического аппарата на изовысотном участке;
hи - высота полета КА по изовысотному участку;
R - средний радиус планеты;
Кб - балансировочное аэродинамическое качество космического аппарата;
Vj - скорость полета космического аппарата по изовысотному участку на j-м интервале измерения;
εj - угол между проекцией вектора скорости на местный горизонт и местной параллелью при движении космического аппарата по изовысотному участку на j-м интервале измерения;
φj - широта подспутниковой точки полета космического аппарата по изовысотному участку на j-м интервале измерения, j=1, 2, …, l;
l - конечный интервал измерений текущих координат при движения КА по изовысотному участку.
Необходимость реализации изовысотного участка полета обуславливается следующими соображениями: во-первых, при таком режиме предотвращается возможность роста высоты полета, что способствует повышению эффективности аэродинамического торможения КА и впоследствии приведет к снижению массы топлива при осуществлении мягкой посадки аппарата на поверхность планеты. Во-вторых, обеспечивается возможность бокового маневра КА: при вычислении одного и того же значения функции «arccos» по указанному уравнению можно выбрать различные знаки угла крена γ, что позволяет осуществлять движение КА либо вправо, либо влево в зависимости от относительного расположения трассы полета аппарата и точки посадки.
Анализ вышерассмотренного уравнения для определения угла крена γ показывает, что изовысотный участок полета может быть реализован при различных сочетаниях угла γ и аэродинамического качества Кб. Причем с увеличением Кб уменьшается значение «cosγ». Это позволяет обеспечить полет КА по изовысотному участку с максимально допустимым значением Кб, что дает возможность обеспечения наиболее интенсивного маневра КА в боковом направлении. При этом увеличение аэродинамического качества Кб не должно привести к росту боковой составляющей перегрузки, при которой полная перегрузка превосходит значение min nmax. Это обеспечивается реализацией полета КА по изовысотному участку с балансировочным аэродинамическим качеством, определяемым с помощью зависимости:
 ,
,
где Kб - текущее значение балансировочного аэродинамического качества при полете космического аппарата по изовысотному участку;

ρ* - плотность атмосферы в момент достижения максимальной перегрузки;
V* - скорость полета космического аппарата в момент достижения максимальной перегрузки;
ρи - плотность атмосферы при полете космического аппарата на изовысотном участке;
Vj - скорость полета космического аппарата по изовысотному участку на j-м интервале измерения, j=1, 2, …, l;
l - конечный интервал измерений текущих координат при движения КА по изовысотному участку.
Итак, в процессе полета КА по изовысотному участку значения γ и Kб определяются в соответствии с представленными зависимостями. При движении КА по этому участку аэродинамическое качество Кб монотонно возрастает (т.к. скорость полета аппарата уменьшается) и достигает своего максимума Kбmax. После этого осуществляют сход КА с изовысотного участка с Кб=Kбmax и нулевым углом крена. Такой режим полета обеспечивает наиболее благоприятные условия при вводе в действие системы мягкой посадки КА.
Также сущность заявленного способа управления космическим аппаратом аэродинамическим качеством при спуске в атмосфере заключается в осуществлении входа космического аппарата в атмосферу с максимальным значением эффективного аэродинамического качества, измерении текущих значений параметров движения космического аппарата в процессе его спуска в атмосфере, управлении балансировочным аэродинамическим качеством Kб и углом крена γ и движении на изовысотном участке, при этом после уменьшения текущей скорости движения космического аппарата Vi до значения скорости входа космического аппарата в атмосферу V0 устанавливают текущие значения балансировочного аэродинамического качества
,
где
ri=hi+R;

θ0 - траекторный угол входа космического аппарата в атмосферу;
V0 - скорость входа космического аппарата в атмосферу;
Vi - скорость полета космического аппарата на i-м интервале измерения;
hi - высота полета космического аппарата на i-м интервале измерения;
ri - радиус-вектор, соединяющий центр притяжения планеты и центра масс космического аппарата на i-м интервале измерения;
εi - угол между проекцией вектора скорости на местный горизонт и местной параллелью на i-м интервале измерения;
ρi - плотность атмосферы на текущей высоте полета космического аппарата hi на i-м интервале измерения, i=1, 2, …, n;
n - конечный интервал измерения координат движения до выхода КА на изовысотный участок;
Px - приведенная нагрузка на лобовую поверхность;
g - ускорение силы тяжести;
ω - угловая скорость вращения планеты;
ρ0 - плотность атмосферы на поверхности планеты;
β - логарифмический коэффициент изменения плотности атмосферы по высоте;
Kбmax - максимальное значение балансировочного аэродинамического качества космического аппарата,
после выхода космического аппарата на изовысотный участок устанавливают текущие значения балансировочного аэродинамического качества Кб, определяемое в соответствии с выражением:
 ,
,
где Kб - текущее значение балансировочного аэродинамического качества при полете космического аппарата по изовысотному участку;

ρ* - плотность атмосферы в момент достижения максимальной перегрузки;
V* - скорость полета космического аппарата в момент достижения максимальной перегрузки;
ρи - плотность атмосферы при полете космического аппарата на изовысотном участке;
Vj - скорость полета космического аппарата по изовысотному участку на j-м интервале измерения,
j=1, 2, …, l;
l - конечный интервал измерений текущих координат при движения космического аппарата по изовысотному участку,
по достижении балансировочным аэродинамическим качеством Kб максимального значения Kбmax осуществляют сход космического аппарата с изовысотного участка и дальнейший его полет в атмосфере с аэродинамическим качеством Kбmax и углом крена γ=0.
Предложенный способ управления обладает рядом преимуществ по сравнению с прототипом. Реализация данного способа позволяет уменьшить максимальные значения полной перегрузки, действующей на КА в процессе снижения в атмосфере за счет использования рациональной программы управления балансировочным аэродинамическим качеством на участке полета до рикошета траектории, где обеспечивается минимум максимальной перегрузки min nmax, a также за счет осуществления режима полета по изовысотному участку с переменным значением аэродинамического качества, что обеспечивает возможность выполнения ограничения:
n(t)≤min nmax,
где n(t) - текущее значение полной перегрузки в момент времени t,
min nmax - минимальное значение максимальной перегрузки, действующей на космический аппарат на участке его выхода на изовысотный участок.
Таким образом, технический результат изобретения заключается в снижении максимальных значений полной перегрузки, что позволяет повысить устойчивость управления космическими аппаратами, снизить требования к прочностным характеристикам элементов конструкции КА и оптимизировать массово-габаритный баланс при компоновке спускаемых аппаратов. Это особенно важно при проектировании космических аппаратов, осуществляющих спуск в высокоплотных атмосферах Венеры и Юпитера, где пиковые значения максимальных перегрузок могут достигать чрезвычайно больших величин. Полученные результаты численных расчетов показали, что уменьшение максимума полной перегрузки при спуске КА в атмосфере Марса достигает 2÷5 единиц, при спуске в атмосфере Венеры - 8÷15 единиц, при спуске в атмосфере Юпитера - 20÷30 единиц.
Указанный технический результат достигается за счет уменьшения максимальной полной перегрузки, действующей на КА в процессе спуска в атмосфере при оптимальном управлении аэродинамическим качеством космического аппарата.
Также указанный технический результат достигается за счет того, что в известном способе-прототипе управления космическим аппаратом аэродинамическим качеством при спуске в атмосфере, заключающемся в осуществлении входа космического аппарата в атмосферу с максимальным значением эффективного аэродинамического качества, измерении текущих значений параметров движения космического аппарата в процессе его спуска в атмосфере, управлении балансировочным аэродинамическим качеством Kб и углом крена γ и движении на изовысотном участке дополнительно после уменьшения текущей скорости движения космического аппарата Vi до значения скорости входа космического аппарата в атмосферу V0, устанавливают текущие значения балансировочного аэродинамического качества
,
где
ri=hi+R;
θ0 - траекторный угол входа космического аппарата в атмосферу;
V0 - скорость входа космического аппарата в атмосферу;
Vi - скорость полета космического аппарата на i-м интервале измерения;
hi - высота полета космического аппарата на i-м интервале измерения;
ri - радиус-вектор, соединяющий центр притяжения планеты и центра масс космического аппарата на i-м интервале измерения;
εi - угол между проекцией вектора скорости на местный горизонт и местной параллелью на i-м интервале измерения;
ρi - плотность атмосферы на текущей высоте полета космического аппарата hi на i-м интервале измерения, i=1, 2, …, n;
n - конечный интервал измерения координат движения до выхода КА на изовысотный участок;
Px - приведенная нагрузка на лобовую поверхность;
q - ускорение силы тяжести;
ω - угловая скорость вращения планеты;
ρ0 - плотность атмосферы на поверхности планеты;
β - логарифмический коэффициент изменения плотности атмосферы по высоте;
Kбmax - максимальное значение балансировочного аэродинамического качества космического аппарата,
после выхода космического аппарата на изовысотный участок устанавливают текущие значения балансировочного аэродинамического качества
,
где Kб - текущее значение балансировочного аэродинамического качества при полете космического аппарата по изовысотному участку;

ρ* - плотность атмосферы в момент достижения максимальной перегрузки;
V* - скорость полета космического аппарата в момент достижения максимальной перегрузки;
ρи - плотность атмосферы при полете космического аппарата на изовысотном участке;
Vj - скорость полета космического аппарата по изовысотному участку на j-м интервале измерения,
j=1, 2, …, l;
l - конечный интервал измерений текущих координат при движения космического аппарата по изовысотному участку,
по достижении балансировочным аэродинамическим качеством Kб максимального значения Kбmax осуществляют сход космического аппарата с изовысотного участка и дальнейший его полет в атмосфере с аэродинамическим качеством Kбmax и углом крена γ=0.
Заявленный способ управления космическим аппаратом аэродинамическими силами при его спуске в атмосфере поясняется следующими фигурами.
На фиг. 1 представлены зависимости скорости V, высоты полета КА h, балансировочного аэродинамического качества Kб и угла крена γ от времени движения аппарата в атмосфере t при реализации предлагаемого способа. При этом использовались следующие исходные данные: скорость входа космического аппарата в атмосферу V0=8 км/с, траекторный угол θ0=минус 8°, максимальное значение балансировочного аэродинамического качества Кбmax=2, приведенная нагрузка на лобовую поверхность космического аппарата Рx=5000 кг/м2.
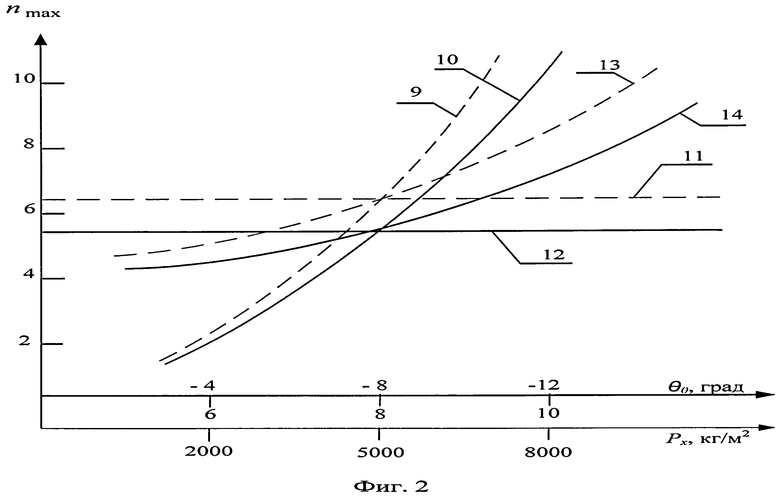
На фиг. 2 приведены результаты, позволяющие оценить эффективность использования предлагаемого способа управления по сравнению со способом-прототипом. Так, в диапазоне изменения скорости входа КА в атмосферу Марса V0 от 6 до 10 км/с, угла входа θ0 от минус 5° до минус 12°, приведенной нагрузки на лобовую поверхность Px от 1000 до 10000 кг/м2 уменьшение максимума полной перегрузки достигает примерно 2÷5 единиц.
На фиг. 1, 2 и в тексте приняты следующие обозначения.
1 - начальный участок полета КА: Kб=Kбmax, γ=0,
2 - участок полета КА с наиболее интенсивными перегрузками: Kб определяется из условия минимизации максимальной полной перегрузки, γ=0,
3 - изовысотный участок: Kб определяется из условия не превышения полной перегрузки относительно значения min nmax, γ определяется из условия полета КА с постоянным значением высоты,
4 - участок схода КА с изовысотного участка: Kб=Кбmах, γ=0,
5 - зависимость изменения балансировочного аэродинамического качества Kб от времени спуска t,
6 - зависимость изменения угла крена γ от времени спуска t,
7 - зависимость изменения скорости полета КА V от времени спуска t,
8 - зависимость изменения высоты полета КА h от времени спуска t,
9 - зависимость изменения максимальной перегрузки nmax от угла наклона вектора скорости к местному горизонту θ0 при входе в атмосферу при использовании способа-прототипа,
10 - зависимость изменения максимальной перегрузки nmax от угла наклона вектора скорости к местному горизонту θ0 при входе в атмосферу при использовании изобретения,
11 - зависимость изменения максимальной перегрузки nmax от приведенной нагрузки на лобовую поверхность Px при использовании способа-прототипа,
12 - зависимость изменения максимальной перегрузки nmax от приведенной нагрузки на лобовую поверхность Px при использовании изобретения,
13 - зависимость изменения максимальной перегрузки nmax от скорости входа КА в атмосферу V0 при использовании способа-прототипа,
14 - зависимость изменения максимальной перегрузки nmax от скорости входа КА в атмосферу V0 при использовании изобретения.
Как следует из фиг. 1, представленные зависимости изменения балансировочного аэродинамического качества - 6 и угла крена - 5 на этапах выхода на изовысотный участок и движения по нему, а также соответствующие изменения скорости - 7 и высоты полета - 8 КА от времени спуска обеспечивают снижение максимальных полных перегрузок, действующих на КА в процессе полета в атмосфере.
Из фиг. 2 следует, что при использовании изобретения зависимости максимальных перегрузок nmax от угла θ0 - 9, от параметра Px - 11 и от скорости входа в атмосферу V0 - 13 соответствует более высоким значениям nmax по сравнению с аналогичными зависимостями, соответственно 10, 12 и 13 для способа-прототипа.
Ожидаемая эффективность использования предлагаемого способа управления по сравнению, например, со способом-прототипом, состоит в существенном уменьшении максимальной полной перегрузки. Так при спуске КА в атмосфере Марса для диапазона исходных данных 6 км/с ≤ V0 ≤ 10 м/с, минус 5° ≥ θ0 ≥ минус 20°, 1000 кг/м2 ≤ Px ≤ 10000 кг/м2 уменьшение nmax достигает 2÷5 единиц. Еще большее снижение nmax обеспечивается при спуске в атмосфере Венеры (примерно до 8-15 единиц) и при спуске в атмосфере Юпитера (примерно до 20-30 единиц).
Покажем возможность осуществления изобретения, т.е. возможность его промышленного применения.
Как известно, спуск КА в атмосферах планет является завершающим и наиболее динамичным этапом большинства космических экспедиций. Его успешная реализация зависит от ряда различных факторов, в том числе от обеспечения допустимых перегрузочных режимов. Реализация таких режимов во многом обеспечивает эффективное выполнение программ полета КА в целом. Этим обуславливается актуальность разработки способа управления космическим аппаратом аэродинамическими силами при спуске в атмосфере, обеспечивающим снижение максимальной полной перегрузки.
Что касается технических средств, обеспечивающих управление космическим аппаратом аэродинамическими силами при его спуске в атмосферах планет, то они известны - см., например, работу Иванова Н.М., Мартынова А.И. «Управление движением космического аппарата в атмосфере Марса». М.: Наука, 1977 г., стр. 270-279 и при необходимости приведенную в ней многочисленную библиографию.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ СПУСКОМ КОСМИЧЕСКОГО АППАРАТА В АТМОСФЕРЕ ПЛАНЕТЫ | 2013 |
|
RU2537192C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА ПРИ ПОСАДКЕ В ЗАДАННУЮ ОБЛАСТЬ ПОВЕРХНОСТИ ПЛАНЕТЫ | 2014 |
|
RU2590775C2 |
| СПОСОБ УПРАВЛЕНИЯ СПУСКОМ КОСМИЧЕСКОГО АППАРАТА В АТМОСФЕРЕ ПЛАНЕТЫ | 2013 |
|
RU2537193C1 |
| КОСМИЧЕСКИЙ АППАРАТ ДЛЯ СПУСКА В АТМОСФЕРЕ ПЛАНЕТЫ И СПОСОБ СПУСКА КОСМИЧЕСКОГО АППАРАТА В АТМОСФЕРЕ ПЛАНЕТЫ | 1994 |
|
RU2083448C1 |
| СПОСОБ УПРАВЛЕНИЯ СПУСКОМ КОСМИЧЕСКОГО АППАРАТА В АТМОСФЕРЕ ПЛАНЕТ | 2012 |
|
RU2493059C1 |
| КОСМИЧЕСКИЙ АППАРАТ ДЛЯ СПУСКА В АТМОСФЕРЕ ПЛАНЕТЫ И СПОСОБ ЕГО СПУСКА В АТМОСФЕРЕ ПЛАНЕТЫ (ВАРИАНТЫ) | 2001 |
|
RU2213682C2 |
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМ АППАРАТОМ ПРИ ЕГО ВЫВЕДЕНИИ НА ОРБИТУ ИСКУССТВЕННОГО СПУТНИКА ПЛАНЕТЫ | 2014 |
|
RU2575556C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА НА АКТИВНОМ УЧАСТКЕ ЕГО ВЫВЕДЕНИЯ НА ОРБИТУ ИСКУССТВЕННОГО СПУТНИКА ПЛАНЕТЫ | 2015 |
|
RU2596004C2 |
| СПОСОБ УПРАВЛЕНИЯ ВЫВЕДЕНИЕМ КОСМИЧЕСКОГО АППАРАТА НА ОРБИТУ ИСКУССТВЕННОГО СПУТНИКА ПЛАНЕТЫ | 2012 |
|
RU2520629C1 |
| Способ ситуационного терминального управления спускаемым аппаратом в атмосфере Земли на рикошетирующей траектории возвращения от Луны | 2020 |
|
RU2752305C1 |

Изобретение относится к космической технике и может быть использовано при спуске в атмосфере космического аппарата (КА). Осуществляют вход КА в атмосферу с максимальным значением эффективного аэродинамического качества, измеряют текущие значения параметров движения КА в процессе его спуска в атмосфере, уменьшают текущую скорость движения КА до значения скорости входа КА в атмосферу, устанавливают текущие значения балансировочного аэродинамического качества КА в зависимости от параметров движения КА в процессе его спуска в атмосфере, управляют в зависимости от параметров движения КА на изовысотном участке балансировочным аэродинамическим качеством и углом крена, осуществляют сход КА с изовысотного участка и дальнейший его полет в атмосфере с максимальным значением аэродинамического качества и нулевым углом крена. Изобретение позволяет уменьшить максимальную полную перегрузку на конструкцию КА. 2 ил.
Способ управления космическим аппаратом с использованием аэродинамического качества при спуске в атмосфере, заключающийся в осуществлении входа космического аппарата в атмосферу с максимальным значением эффективного аэродинамического качества, измерении текущих значений параметров движения космического аппарата в процессе его спуска в атмосфере, управлении балансировочным аэродинамическим качеством Kб и углом крена γ и движении на изовысотном участке, отличающийся тем, что после уменьшения текущей скорости движения космического аппарата Vi до значения скорости входа космического аппарата в атмосферу V0 устанавливают текущие значения балансировочного аэродинамического качества
,
где
ri=hi+R;

θ0 - траекторный угол входа космического аппарата в атмосферу;
V0 - скорость входа космического аппарата в атмосферу;
Vi - скорость полета космического аппарата на i-м интервале измерения;
hi - высота полета космического аппарата на i-м интервале измерения;
ri - радиус-вектор, соединяющий центр притяжения планеты и центра масс космического аппарата на i-м интервале измерения;
εi - угол между проекцией вектора скорости на местный горизонт и местной параллелью на i-м интервале измерения;
ρi - плотность атмосферы на текущей высоте полета космического аппарата hi на i-м интервале измерения, i=1, 2, …, n;
n - конечный интервал измерения координат движения до выхода КА на изовысотный участок;
Px - приведенная нагрузка на лобовую поверхность;
g - ускорение силы тяжести;
ω - угловая скорость вращения планеты;
ρ0 - плотность атмосферы на поверхности планеты;
β - логарифмический коэффициент изменения плотности атмосферы по высоте;
Kбmax - максимальное значение балансировочного аэродинамического качества космического аппарата,
после выхода космического аппарата на изовысотный участок устанавливают текущие значения балансировочного аэродинамического качества Kб, определяемое в соответствии с выражением:
,
где Kб - текущее значение балансировочного аэродинамического качества при полете космического аппарата по изовысотному участку;

ρ* - плотность атмосферы в момент достижения максимальной перегрузки;
V* - скорость полета космического аппарата в момент достижения максимальной перегрузки;
ρи - плотность атмосферы при полете космического аппарата на изовысотном участке;
Vj - скорость полета космического аппарата по изовысотному участку на j-м интервале измерения,
j=1, 2, …, l;
l - конечный интервал измерений текущих координат при движения космического аппарата по изовысотному участку,
по достижении балансировочным аэродинамическим качеством Kб максимального значения Kбmax осуществляют сход космического аппарата с изовысотного участка и дальнейший его полет в атмосфере с аэродинамическим качеством Kбmax и углом крена γ=0.
| СПОСОБ УПРАВЛЕНИЯ СПУСКОМ КОСМИЧЕСКОГО АППАРАТА В АТМОСФЕРЕ ПЛАНЕТ | 2012 |
|
RU2493059C1 |
| КОСМИЧЕСКИЙ АППАРАТ ДЛЯ СПУСКА В АТМОСФЕРЕ ПЛАНЕТЫ И СПОСОБ СПУСКА КОСМИЧЕСКОГО АППАРАТА В АТМОСФЕРЕ ПЛАНЕТЫ | 1994 |
|
RU2083448C1 |
| US 6398166 B1, 04.06.2002 | |||
| US 3276722 A1, 04.10.1966 | |||

