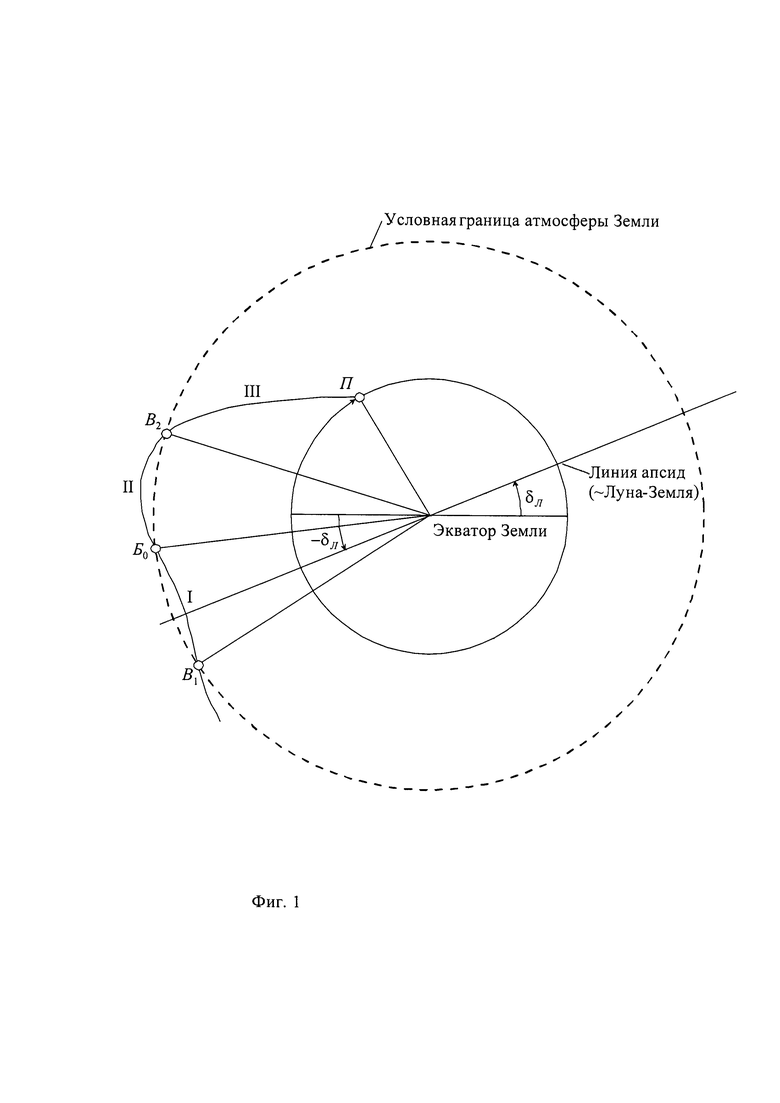
Изобретение относится к области управления движением космического аппарата в атмосфере при наличии совокупных возмущений (самого аппарата и окружающей среды). Предлагаемый способ может быть использован для управления движением спускаемого аппарата (СА), который при возвращении от Луны входит в атмосферу Земли с околопараболической скоростью со стороны южного полушария, использует рикошетирующую траекторию с двумя погружениями в атмосферу, разделенными внеатмосферным (баллистическим) участком, и совершает посадку в ограниченном районе на территории Российской Федерации (РФ). Фиг. 1 схематично показывает траекторию возвращения. Два погружения (участки I и III) необходимы и достаточны для посадки на территории РФ при подлете с юга, что обеспечивает выполнение ограничения по перегрузке. Увеличение числа погружений усложняет реализацию заданной точности посадки и не требуется для достижения территории РФ при подлете с юга. Реализуемая дальность спуска (от первого входа в атмосферу до посадки) находится в диапазоне 5000-10000 км, а такие траектории очень чувствительны к управлению и действующим возмущениям (ошибки аэродинамических характеристик, массы и центровки, навигационных измерений, управляющих двигателей, вариации плотности атмосферы, ветер и др.). Требование посадки в южных районах РФ определяет необходимую точность приведения (порядка 3-4 км). Дополнительно накладываются ограничения по перегрузке (порядка 6g) и расходу топлива.
Известен способ управления возвращаемым от Луны аппаратом «Зонд-7», который после облета Луны совершил посадку на территории СССР в Казахстане с недолетом 50 км. Способ основан на отслеживании опорной зависимости кажущегося ускорения от кажущейся скорости [1]. Управление являлось однопараметрическим, т.е. устранялся только продольный промах. Полученная точность приведения соответствовала своему времени. Основным недостатком этого способа является невысокая точность приведения, что делает невозможной посадку в южных районах территории РФ.
В американской программе Apollo использовалось однопараметрическое терминальное управление продольной дальностью спуска. Боковой промах удерживался в пределах заданного коридора за счет переворотов по крену [2]. Прогнозируемый промах вычислялся по приближенным конечным формулам, а достигнутая точность составляла около 10 км при дальностях приводнения в диапазоне 2200-2800 км на траекториях спуска без рикошетах [3]. Основным недостатком этого способа является невысокая точность приведения даже на дальность порядка 3000 км.
Для перспективного американского пилотируемого корабля Orion разрабатывается алгоритм терминального управления PredGuid, который является улучшенной версией алгоритма Apollo и должен обеспечивать управление на рикошетирующей траектории спуска с дальностью порядка 10000 км при возвращении от Луны с приводнением или приземлением в любой континентальной части США. В нем используется численный прогноз остающейся траектории для устранения продольного промаха. Боковой промах регулируется как в алгоритме Apollo. На отдельных фазах управления вводятся поправочные множители с целью уточнения фактического аэродинамического качества аппарата и плотности атмосферы. Прогнозируемая точность приведения около 5 км [4]. В дальнейшем предполагается модифицировать алгоритм PredGuid для двухпараметрического управления с одновременным устранением промаха в продольном и боковом направлениях. Основным недостатком существующего алгоритма является отсутствие жесткого контроля бокового промаха и максимальной перегрузки.
Прототипом предлагаемого алгоритма является Терминальный Алгоритм Управления Спуском - Модифицированный ТАУС-М [5]. В этом алгоритме адаптация к фактическим условиям спуска осуществляется без разделения аэродинамических и атмосферных ошибок, а ошибка навигационной высоты не идентифицируется. В результате удается обеспечить заданную точность приведения СА к месту посадки только с вероятностью 97%, а максимальная перегрузка достигает 7.3g.
Предлагаемый алгоритм управления ТАУС-МС (Терминальный Алгоритм Управления Спуском - Модифицированный Ситуационный) по аналогии с прототипом реализует двухпараметрическое управление с численным прогнозом остающейся траектории для коррекции командной зависимости угла крена от кажущейся скорости. На каждом шаге коррекции уточняются величина угла крена и кажущаяся скорость очередного переворота по крену. Делаются три численных прогноза остающейся части траектории для расчета методом конечных разностей частных производных компонент промаха (х, z) по параметрам управления (величине угла крена γ и кажущейся скорости изменения его знака Vк). Решается система двух линейных уравнений для поправок Δγ, ΔV [6]:
(х0, z0 - координаты прогнозного промаха с управлением, полученным на предыдущем шаге коррекции).
Расчет уточненных параметров управления Δγ, ΔV выполняется в течение одного шага коррекции (длительностью 1с) с прогнозом текущего вектора состояния (радиус-вектора и вектора скорости) на один шаг вперед для задания начальных условий прогноза, т.е. на текущем шаге коррекции определяется «упрежденное» управление для следующего шага, которое будет использовано через один шаг. Тем самым учитывается время для вычисления поправок Δγ, ΔV в бортовом компьютере.
Для высокоточного терминального управления особое значение имеет идентификация фактических условий движения и их учет при коррекции командной зависимости угла крена от кажущейся скорости.
По навигационным измерениям вектора кажущегося ускорения и угловой скорости с помощью связанных акселерометров и датчиков угловой скорости ТАУС-МС позволяет идентифицировать относительное аэродинамическое качество аппарата kотн (отношение фактического аэродинамического качества к расчетному, т.е. бортовому), построить приближенную функцию относительной плотности атмосферы ρотн (отношение фактической плотности ρфак к плотности ρсм по бортовой среднемесячной модели на навигационной высоте) и определить ошибку навигационной высоты Δh (разницу между навигационной высотой и фактической), которая может достигать ±2 км на участке первого погружения и ±3 км на участке второго погружения. Это все реализуется с самого начала входа в атмосферу, до точки рикошета, когда по существу формируется вся рикошетирующая траектория. В ТАУС-МС впервые предложен и реализован способ разделения аэродинамических ошибок и атмосферных возмущений, а также определяется ошибка навигационной высоты, что существенно повышает толерантность управления к действующим возмущениям, делает его независимым от модели возмущений.
Для адаптации к действующим возмущениям ТАУС-МС последовательно выполняет следующие операции. По навигационным измерениям вычисляется коэффициент адаптации

где WVизм - измеренная проекция вектора кажущегося ускорения на навигационный вектор воздушной скорости СА, WVрасч - аналогичная расчетная величина, вычисляемая с использованием бортовых моделей аэродинамических характеристик и среднемесячной атмосферы, а также коэффициент адаптации

где Wпс изм, Wпс расч - соответствующие величины вектора кажущегося ускорения, ортогонального к вектору воздушной скорости. Относительное аэродинамическое качество вычисляется по формуле

а для учета относительной плотности атмосферы предложена формула на основе функций (2) и(3):

Эта формула с точностью 3-6% совпадает с относительной плотностью и позволяет разделить аэродинамические ошибки (порождаемые ошибками самой аэродинамики и ошибками фактического положения центра масс) и атмосферные ошибки. Разделение ошибок аэродинамики (которые не меняются на данной траектории) и атмосферы позволило повысить точность идентификации возмущенной атмосферы и коррекции управления.
Ошибка навигационной высоты на участке первого погружения в атмосферу начинает расти почти линейно после точки рикошета (т.е. после пролета минимальной высоты). Поэтому адаптация к фактическим условиям движения начинается до точки рикошета, когда, в основном, формируется вся рикошетирующая траектория. По формуле (4) определяется относительное аэродинамическое качество СА, которое сохраняется на всей траектории. При этом в расчете прогнозных аэродинамических коэффициентов СА на гиперзвуковом участке учитывается фактический балансировочный угол атаки по навигационным измерениям углового движения СА, так как на нисходящей ветви амплитуда колебаний может достигать 3°-6° относительно фактического балансировочного положения. Только в окрестности точки рикошета колебания почти затухают, но к этому моменту рикошетирующая траектория оказывается практически сформированной. Относительная плотность атмосферы (5) табулируется на нисходящей ветви первого погружения СА в атмосферу и используется для прогноза движения на восходящей ветви. На высотах ниже достигнутой принимается ρотн=1 что соответствует среднемесячной атмосфере. На участке второго погружения относительная плотность атмосферы уточняется до высоты 70 км, т.е. до появления ошибки навигационной высоты, которая на этом участке может достигать ±3 км. Ниже точки полученных измерений относительная плотность атмосферы прогнозируется как линейная функция высоты от текущего значения до единицы на нулевой высоте.
Относительное аэродинамическое качество (4) пересчитывается в поправку к коэффициенту момента тангажа по формуле

Здесь dmz/dα - производная коэффициента момента тангажа по углу атаки, kрасч - расчетное значение аэродинамического качества, dk/dα - производная аэродинамического качества по углу атаки. Для близких к реальным величинам номинальных аэродинамических коэффициентов имеем согласно (6)

В зависимости от величины к0Т11 поправочный коэффициент Δmz<0 при kотн>1, Δmz=0 при kотн=1 и Δmz>0 при kотн<1.
С использованием (7), по полной таблице номинальных («расчетных») аэродинамических характеристик (включающей коэффициенты лобового сопротивления Сxa, подъемной силы Сyа, и момента тангажа mz в зависимости от угла атаки а, числа М и высоты h) формируются прогнозные балансировочные коэффициенты Сxa прог и Суa прог, которые соответствуют условию

где mz - коэффициент момента тангажа номинальных характеристик, Δmz - поправочный коэффициент (7), -0.002 - эмпирический коэффициент для создания дополнительного «запаса» по дальности спуска. Прогнозные аэродинамические характеристики, соответствующие данным возмущающим факторам согласно (8), не меняются в процессе спуска.
С использованием измеренной величины полного аэродинамического ускорения WΣизм вычисляется поправочный коэффициент β по формуле

где WΣрасч - расчетная величина полного аэродинамического ускорения. По таблице стандартной атмосферы СА-81 (ГОСТ 4401-81) находится поправка Δh, для которой выполняется условие

Формулы (9) и (10) определяют поправку навигационной высоты Δh, которая позволяет уточнить начальный вектор состояния при расчете прогноза.
СА совершает 2 переворота по крену при первом погружении в атмосферу и 3 переворота при втором, что экономит расход топлива. Такое число переворотов необходимо и достаточно для получения требуемой точности приведения.
Техническим результатом изобретения является гарантированное (100%) повышение точности приведения СА к месту посадки до ~2.7 км при дальности спуска порядка 10000 км в условиях действия всех возмущающих факторов, ограничение максимальной перегрузки величиной порядка 6g с выдерживанием допустимого времени действия перегрузки больше 5g по нормативам Man-System Integration Standards NASA-STD-3000 [7], а также экономия расхода запаса топлива на работу управляющих двигателей.
Технический результат достигается тем, что по автономным измерениям вектора кажущегося ускорения в проекциях на оси связанной системы координат СА осуществляется ситуационная (т.е. персональная) адаптация к действующим возмущениям на конкретной возмущенной траектории спуска. Этим ТАУС-МС качественно отличается от прототипа ТАУС-М, в котором реализована общая адаптация с одним коэффициентом адаптации Δmz=-0.004 для всей совокупности действующих возмущений. Достоверность эффективности алгоритма ТАУС-МС подтверждена статистическими испытаниями нескольких тысяч возмущенных траекторий спуска с использованием математической модели полного движения СА (т.е. движения центра масс и относительно центра масс) и модели возмущений, которая включает следующие составляющие (с нормальным и равномерным распределением):
- ошибки аэродинамических характеристик,
- ошибки массы, моментов инерции и центровки,
- возмущенная атмосфера (вариации плотности и ветер),
- навигационные ошибки (акселерометров, датчиков угловой скорости, начальной выставки измерительных осей и точности ее знания, аппаратуры спутниковой навигации),
- ошибки работы управляющих двигателей (тяги, удельной тяги, запаздывания включения-выключения).
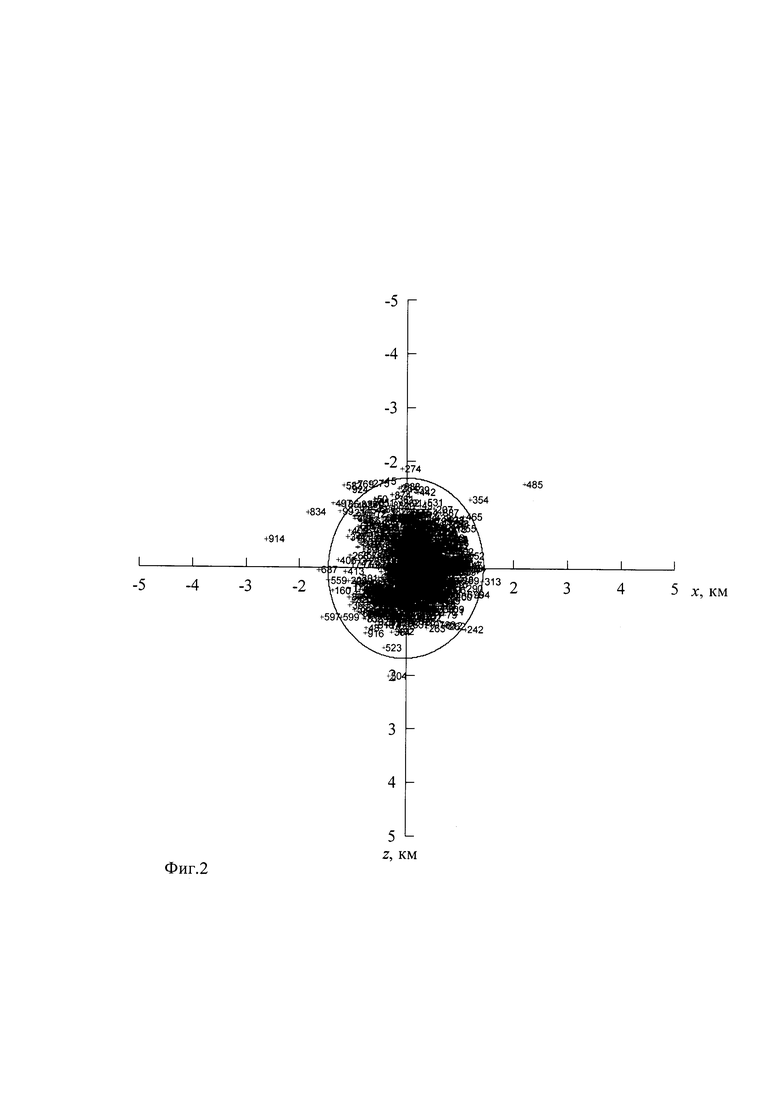
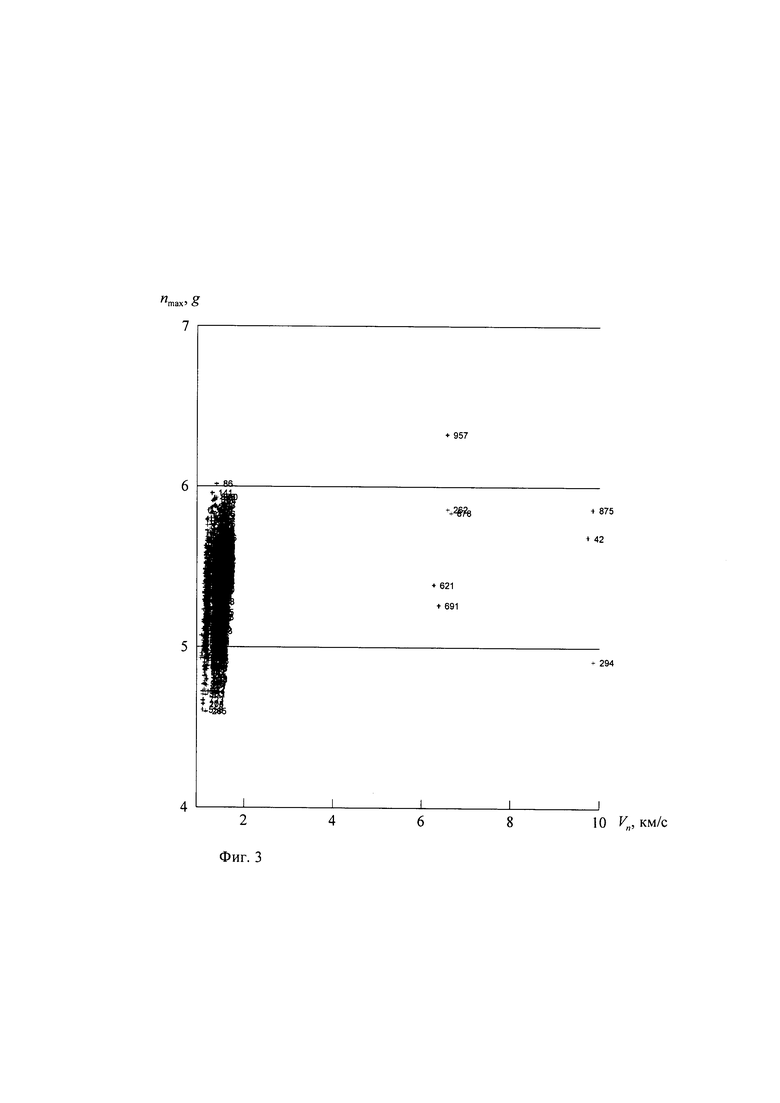
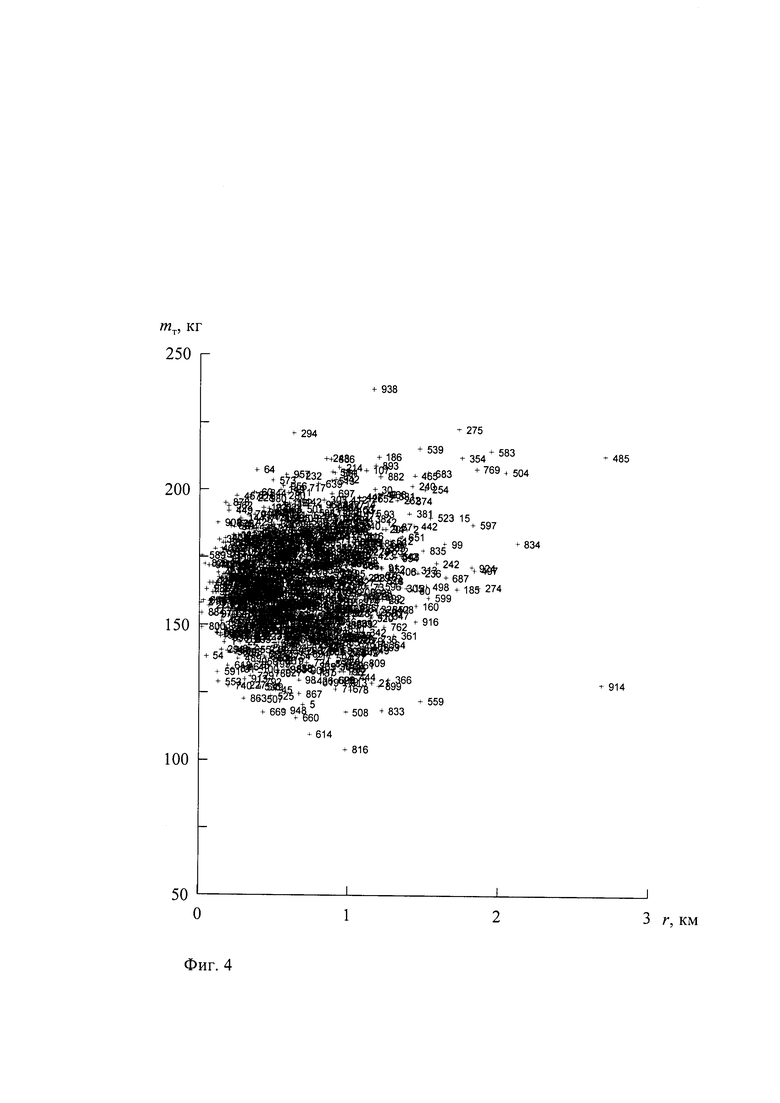
Результаты статистических испытаний ТАУС-МС на 1000 возмущенных траекторий показывают, что точность приведения СА к месту посадки на дальность порядка 10000 км лучше 2.7 км, максимальная перегрузка порядка 6g, а расход топлива меньше располагаемого запаса. На фиг. 2 в посадочной системе координат Oxyz представлены конечные точки приведения ВА на высоте ~4.5 км, где вводится в действие парашютная система. Начало О находится в точке посадки, ось Ох направлена в начальной плоскости по движению, ось Оу - по местной вертикали, ось Oz замыкает правую систему координат. Цифрами показаны номера возмущенных траекторий. Только для двух возмущенных траекторий из 1000 промах больше 2.5 км, а на остальных - меньше 2.5 км. На фиг. 3 приведены максимальные перегрузки nmax в зависимости от кажущихся скоростей Vn, при которых они достигаются. На одной траектории из 1000 перегрузка кратковременно достигает 6.3g, а на остальных траекториях перегрузка не превышает 6g. Время действия повышенной перегрузки не превышает допустимого согласно NASA-STD-3000. Расход топлива mт в зависимости от промаха r=(x2+z2)0.5 показан на фиг. 4. Только на одной траектории расход достигает 232 кг, а на остальных траекториях расход меньше 225 кг при одновременном включении двух двигателей в каждом канале управления. Такие результаты при статистических математических испытаниях двухпараметрического терминального алгоритма управления на рикошетирующих траекториях с дальностью спуска порядка 10000 км получен впервые.
Список цитируемых источников
[1] Глазков А.Г., Ибрагимов К.З., Климин А.В., Трунов Ю.В., Хазан М.А., Хитрик М.С., Ярошевский В.А. Управление космическим аппаратом при входе в атмосферу // Космические исследования 1969, т. 7, №, 2, с. 163-170.
[2] Morth R. Reentry Guidance for Apollo. // 2-nd IF AC Symposium on Automatic Control in Space, 1967, preprint.
[3] Pavlovsky J.E., Leger L.G.St. Apollo Experience Report-Thermal Protection Subsystem // NASA Technical Note NASA TN D-7564, 1974.
[4] Rea J.R., Putnam Z.R. A Comparison of Two Skip Entry Guidance Algorithms // AIAA-2007-6424, 2007.
[5] Евдокимов C.H., Климанов С.И., Корчагин А.Н., Микрин Е.А., Самотохин А.С., Сихарулидзе Ю.Г., Тучин А.Г. Модификация терминального алгоритма управления спуском при возвращении от Луны применительно к «усиленным» возмущениям // Космические исследования, 2020, т. 58, с. 149-164.
[6] Охоцимский Д.Е., Голубев Ю.Ф., Сихарулидзе Ю.Г. Алгоритмы управления космическим аппаратом при входе в атмосферу. - М., Наука, 1975.
[7] Vernis P., Spreng F., Gellys G. Accurate Skip-Entry Guidance for low to medium L/D spacecrafts return missions requiring high range capabilities // AIAA 2011-6649, 2011.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ГИПЕРЗВУКОВЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2000 |
|
RU2167794C1 |
| ГИПЕРЗВУКОВОЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ И СПОСОБ РЕАЛИЗАЦИИ ЕГО ПОЛЕТА | 2009 |
|
RU2393978C1 |
| СПОСОБ УПРАВЛЕНИЯ СПУСКОМ КОСМИЧЕСКОГО АППАРАТА В АТМОСФЕРЕ ПЛАНЕТЫ | 2013 |
|
RU2537193C1 |
| КОСМИЧЕСКИЙ АППАРАТ ДЛЯ СПУСКА В АТМОСФЕРЕ ПЛАНЕТЫ И СПОСОБ СПУСКА КОСМИЧЕСКОГО АППАРАТА В АТМОСФЕРЕ ПЛАНЕТЫ | 1994 |
|
RU2083448C1 |
| СПОСОБ ПРОПОРЦИОНАЛЬНОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА НАЗЕМНЫЕ ОБЪЕКТЫ | 1999 |
|
RU2148235C1 |
| Система мониторинга координат спускаемых космических объектов или их аппаратов в атмосфере Земли и их диспетчерского контроля | 2017 |
|
RU2659376C1 |
| СПОСОБ УПРАВЛЕНИЯ СПУСКОМ КОСМИЧЕСКОГО АППАРАТА В АТМОСФЕРЕ ПЛАНЕТЫ | 2013 |
|
RU2537192C1 |
| СПОСОБ КОНЕЧНОГО ПРИВЕДЕНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА В ПРОДОЛЬНОЙ ПЛОСКОСТИ НА ОСНОВЕ КВАЗИОПТИМАЛЬНОГО ЗАКОНА НАВЕДЕНИЯ | 2020 |
|
RU2737840C2 |
| Способ терминального наведения баллистической ракеты на активном участке траектории при наличии ошибки прицеливания | 2024 |
|
RU2832575C1 |
| Способ спасения створки головного обтекателя ракеты-носителя и устройство для его реализации | 2022 |
|
RU2792472C1 |
Изобретение относится к управлению движением спускаемого аппарата (СА) в атмосфере Земли при наличии возмущений как СА, так и окружающей среды. СА входит в атмосферу с околопараболической скоростью со стороны южного полушария по траектории с двумя (I, III) погружениями в атмосферу, внеатмосферным (II) участком и совершает посадку (П) на территории РФ. Дальность спуска (от В1 до П) составляет 5000…10000 км. Траектория данного типа весьма чувствительна к управляющим и возмущающим воздействиям. В алгоритме управления спуском адаптацию по автономным измерениям кажущегося ускорения СА осуществляют с раздельной идентификацией фактических аэродинамического качества СА и плотности возмущенной атмосферы, а также - ошибки навигационной высоты. Это позволяет правильно выбрать управление в области его максимальной эффективности - вблизи точки рикошета. Техническим результатом является гарантированное повышение точности (до 2,7 км) приведения СА в точку посадки, ограничение времени действия и максимальной величины (до 6g) перегрузки, а также снижение расхода топлива управляющих двигателей. 4 ил.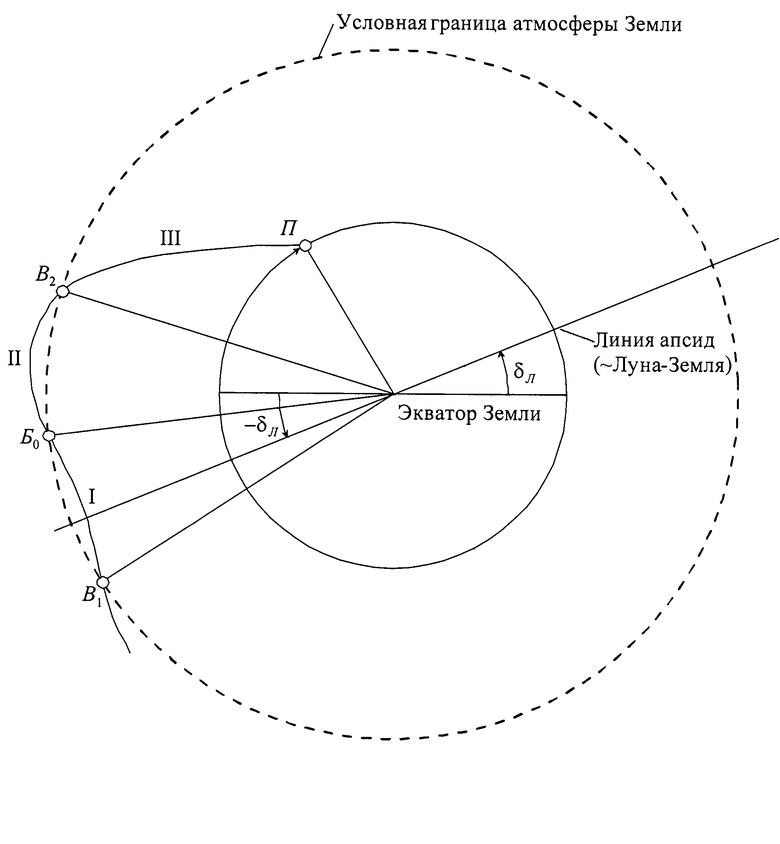
Способ терминального управления спускаемым аппаратом в атмосфере Земли на рикошетирующей траектории возвращения от Луны с применением двухпараметрического управления полетом и численного прогноза остающейся траектории для коррекции зависимости угла крена от кажущейся скорости, отличающийся тем, что на конкретной возмущенной траектории спуска адаптация по автономным измерениям вектора кажущегося ускорения в связанной системе координат спускаемого аппарата осуществляется с учетом сложившейся ситуации и с раздельной идентификацией фактического аэродинамического качества аппарата, фактической плотности возмущенной атмосферы и ошибки навигационной высоты.
| Евдокимов C.H., Климанов С.И | |||
| и др | |||
| Модификация терминального алгоритма управления спуском при возвращении от Луны применительно к "усиленным" возмущениям | |||
| Космические исследования, 2020, т | |||
| Способ окисления боковых цепей ароматических углеводородов и их производных в кислоты и альдегиды | 1921 |
|
SU58A1 |
| Подъемник для выгрузки и нагрузки барж сплавными бревнами, дровами и т.п. | 1919 |
|
SU149A1 |
| СПОСОБ УПРАВЛЕНИЯ СПУСКОМ КОСМИЧЕСКОГО АППАРАТА В АТМОСФЕРЕ ПЛАНЕТЫ | 2013 |
|
RU2537193C1 |
| Способ наведения беспилотного летательного аппарата | 2018 |
|
RU2691902C1 |
| US 8489258 B2, 16.07.2013 | |||
| US 4829434 A, 09.05.1989. | |||

