Изобретение относится к области устройств, надеваемых на ноги, позволяющих человеку эффективнее использовать ноги для работы, передвижения, развлечений и другой деятельности в обстоятельствах, когда обычное использование ног затруднено или невозможно. В первую очередь это относится к условиям невесомости в космосе, как внутри обитаемых отсеков, так и в открытом космосе, пониженной гравитации при индивидуальном подводном погружении человека. А также относится к условиям нахождения в кронах деревьев, на скалах, на строительных конструкциях.
Прикрепление ног является фундаментальной потребностью для значительной доли всей целенаправленной деятельности человека. Это связано с необходимостью освобождения рук для выполнения точных работ, включая прикладывание руками человека усилий к внешним объектам, а также с необходимостью самостоятельного передвижения человека - ходьбы, бега. В обычной обстановке с наличием относительно ровных поверхностей закрепление ног осуществляется совокупным действием силы тяжести, действующей на тело человека, и силы трения, действующей на стопы или обувь. Далее в описании устройство, закрепленное на обуви, которая, в свою очередь, надета на ногу, рассматривается как одетое на ногу. Часто, для прикрепления, какого-либо устройства к внешнему объекту используется метод зажима или обжима. При этом подвижный элемент(ы) устройства своим движением зажимает или обжимает внешний объект или его элементы между подвижными относительно друг друга элементами. В природе у человека, многих видов обезьян и некоторых видов птиц на хватательных конечностях один или более пальцев противопоставлены остальным и обхватывают внешние объекты с противоположной стороны. Что повышает надежность прикрепления.
Общеизвестно устройство для механического прикрепления ноги к внешнему объекту, одеваемое на ногу, выполненное с возможностью открепления ноги от ранее прикрепленного внешнего объекта в виде монтажных лаз, выбранное как прототип. Недостатком прототипа является то, что прототип действует только при наличии силы тяжести и при ограниченных углах ориентации вектора силы тяжести относительно направления оси столба. В частности, этот угол должен быть нулевым или острым. Данный недостаток вызван конструктивной особенностью прототипа - прототип в момент механического прикрепления ноги к внешнему объекту (столбу) приводится в действие силой тяжести, действующей на тело человека. Это легко проверяется, если заменить человека на простой груз, то прототип будет работать, в то время как мысленное отключение силы тяжести автоматически приводит к невозможности прототипа выполнять свои функции.
Техническая задача заключается в достижении технического результата - снятия зависимости работоспособности устройства от наличия и ориентации силы тяжести относительно внешнего объекта, к которому прикрепляется нога. Технический результат достигается совокупным действием ограничительных и отличительных признаков. Ограничительные признаки - устройство для механического прикрепления ноги к внешнему объекту, надеваемое на ногу, выполненное с возможностью открепления ноги от ранее прикрепленного внешнего объекта. Отличительные признаки - содержит по крайней мере один подвижный элемент, обеспечивающий механическое прикрепление ноги к внешнему объекту своим движением, приводимым двигателем и/или пружинным элементом. Действительно, если движение подвижного элемента, обеспечивающее механическое прикрепление, имеет источником движения двигатель и/или пружину, то само прикрепление уже не зависит от наличия и ориентации силы тяжести.
Для изобретения ближайшей аналогией из мира природы является строение ног обезьян, фактически имеющих на ногах дополнительные кисти, аналогичные по устройству и функционалу кистям рук. Такая особенность позволяет обезьянам прикрепляться к внешним объектам, в первую очередь к ветвям деревьев, с непревзойденной эффективностью. С другой стороны, современный уровень развития манипуляторов и протезов позволяет реализовать для ног человека аналог кисти обезьяны.
Для увеличения надежности прикрепления ноги к внешнему объекту в конкретных формах реализации устройство может быть выполнено в виде защелкивающегося карабина. Для расширения возможностей прикрепления ноги к внешнему объекту в конкретных формах реализации устройство может быть выполнено с возможностью расклинивания своим(и) элементом(ами) в углублениях внешнего объекта. Двигатель устройства в конкретных формах реализации может быть выполнен как: электрический; пневматический; гидравлический; с использованием искусственных мышц; внутреннего сгорания; комбинация двух или более перечисленных видов двигателей. Для упрощения прикрепления к элементам внешних объектов, имеющих специальную форму, приспособленную для захвата, в конкретных формах реализации устройства форма его элементов выполнена оптимизированной для прикрепления к стандартным скобам или трапам для передвижения. В конкретных формах реализации устройства привод подвижного элемента может быть выполнен управляемым: движением или приложенным усилием стопы; или движением или приложенным усилием пальца или пальцев ноги или руки; или нервными импульсами, посылаемыми на мышцы пальцев ног или стопы; или возбуждением определенных зон головного мозга человека; или голосом человека; или комбинацией перечисленных методов. Представляется предпочтительным управление движениями или приложенными усилиями пальцев ног. Так этот вариант исполнения достаточно прост и освобождает руки человека для других действий. На текущем технологическом уровне скафандры для работы в открытом космосе используются разными людьми. Для увеличения удобства устройства для разных пользователей в конкретных формах реализации устройство может содержать заменяемую индивидуальную часть в виде вкладыша, или носка, или мокасины, или стельки, или обуви. Для увеличения универсальности устройства при работе под водой в конкретных формах реализации устройство может быть дополнено лопастью, аналогичной лопасти ласты. Для увеличения жесткости прикрепления ноги к внешнему объекту в конкретных формах реализации устройство может быть выполнено с возможностью прикрепления ноги к внешнему объекту методом зажима или обжима внешнего объекта или его элементов. Для увеличения универсальности в конкретных формах реализации устройство может быть выполнено в виде манипулятора и содержать как минимум два пальца с двумя или больше фалангами каждый. Для улучшения надежности прикрепления устройства с пальцами в конкретных формах реализации устройства в виде манипулятора по крайней мере два пальца противопоставлены друг другу. Для предотвращения паразитного зацепления пальцев в конкретных формах реализации устройство с пальцами может быть выполнено с возможностью расположения пальцев в пассивном состоянии прижатыми к ноге или обуви или в специальных углублениях обуви. Устройство, в первую очередь, предназначено для использования в паре, по одному на каждую ногу. С помощью устройства, в первую очередь, в варианте, обеспечивающем захват, могут быть реализованы следующие методы: с целью освобождения рук для целенаправленной деятельности и возможности приложения руками значительных усилий прикрепляют обе ноги к одному объекту; смещают центр тяжести тела человека, прикладывая мышечное усилие к внешнему объекту через ногу, закрепленную на этом внешнем объекте; с целью передвижения последовательно прикрепляют к внешнему объекту одну (первую) ногу, открепляют другую (вторую) ногу, если вторая нога ранее была прикреплена к какому-то внешнему объекту, перемещают вторую ногу в новое положение, закрепляют вторую ногу, открепляют первую ногу и перемещают ее в новое положение, при необходимости повторяют последовательность действий; с целью передвижения прыжками из состояния, когда обе ноги прикреплены к внешнему объекту, последовательно перемещают центр тяжести тела человека в новое положение, открепляют обе ноги от внешнего объекта, передвигают ноги в новое положение, прикрепляют к внешнему объекту обе ноги, при необходимости повторяют последовательность действий.
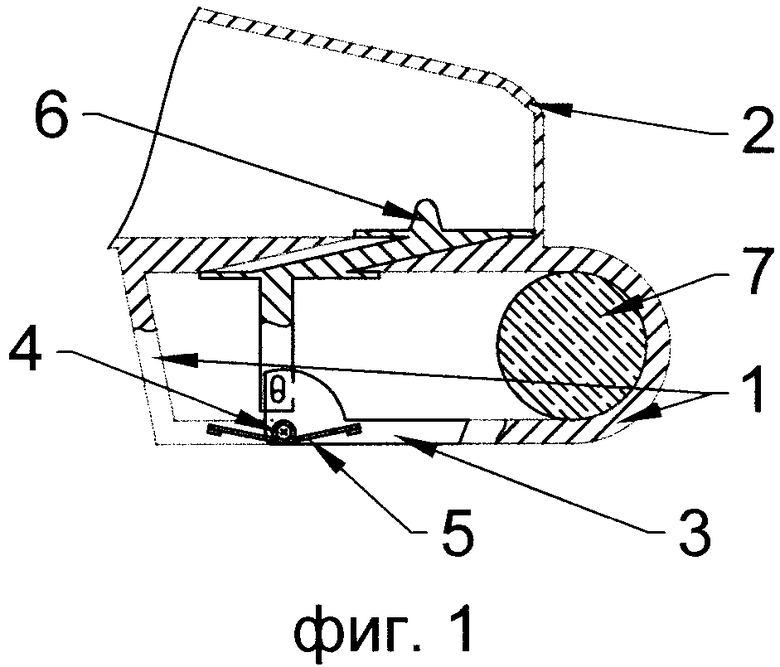
На фиг. 1 изображен пример реализации устройства в виде защелкивающегося карабина.
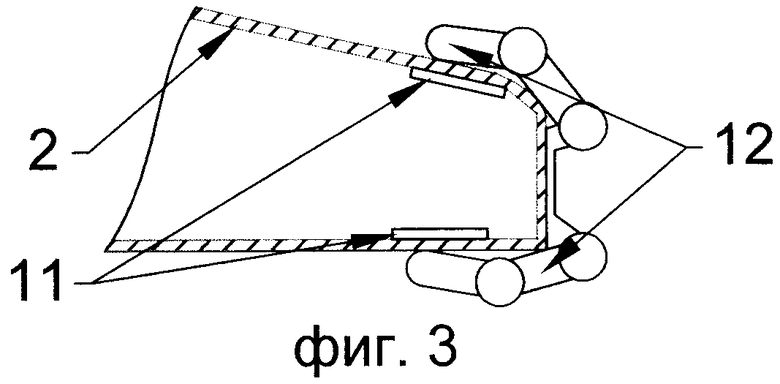
На фиг. 2 изображен пример реализации устройства, выполненного с возможностью зажима внешнего объекта.
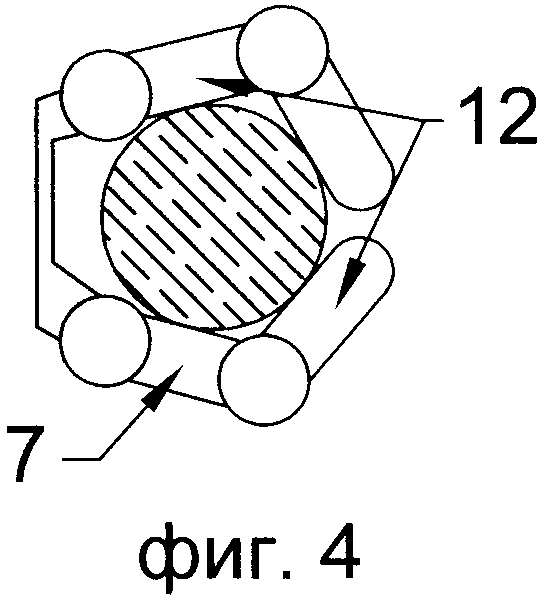
На фиг. 3 изображен пример реализации устройства, который выполнен в виде манипулятора и содержит два или более пальца с двумя фалангами каждый с как минимум двумя пальцами, противопоставленными друг другу, с расположением пальцев в покое прижатыми к обуви.
На фиг. 4 изображен пример реализации устройства из фиг. 3, только манипуляторная часть, в состоянии зажима внешней скобы или перекладины трапа.
Пример 1 (фиг. 1) реализации: устройства, содержащего подвижный элемент, обеспечивающий механическое прикрепление ноги к внешнему объекту своим движением, приводимым пружинным элементом; устройства в виде защелкивающегося карабина; устройства, у которого форма элементов выполнена оптимизированной для прикрепления к стандартным внешним скобам или трапам для передвижения; устройства с приводом подвижного элемента управляемым движением пальца или пальцев ноги. Устройство содержит скобу 1, прикрепленную к обуви 2, подвижный элемент в виде подпружиненной защелки 3, прикрепленной на шарнире 4 к скобе одним концом, с возможностью отклонения внутрь скобы, но без возможности отклонения наружу скобы, пружину 5, прижимающую защелку к скобе, рычаг для пальцев ноги 6, связанный с защелкой с возможностью отпирания защелки, при смещении рычага в сторону пятки. Для прикрепления ноги устройство прижимают к внешнему элементу 7 в районе защелки. После отгиба защелки ногу смещают в направлении пятки, таким образом, внешний объект прижимается к передней части скобы. Защелка освобождается и прижимается к скобе, тем самым препятствуя разделению устройства и внешнего объекта, а значит, и ноги от внешнего объекта. Движение, запирающее скобу, в устройстве приводится в действие пружиной. Для открепления от внешнего объекта человек пальцем(ами) ноги перемещает рычаг в сторону пятки, тем самым отгибая защелку. Что приводит к возможности отделения ноги от внешнего объекта, то есть снимает прикрепление. Для уменьшения нагрузки на пальцы ног устройство может быть дополнено возвратно-поступательным электрическим двигателем и датчиком под пальцами, при надавливании на который двигатель отодвигает защелку. Для работы в открытом космосе или в сухом подводном костюме область нахождения тела человека в устройстве должна быть герметизирована.
Пример 2 (фиг. 2) реализации: устройства, содержащего подвижный элемент, обеспечивающий механическое прикрепление ноги к внешнему объекту своим движением, приводимым двигателем; устройства, которое выполнено с возможностью прикрепления ноги к внешнему объекту методом зажима или обжима внешнего объекта или элементов внешнего объекта. Устройство выполнено в виде клещей, содержащих две губки 8, скрепленные между собой шарниром 9, одна из губок прикреплена к обуви. Губки соединяет между собой возвратно-поступательный электродвигатель постоянного тока 10 с возможностью, под действием двигателя, сведения и разведения губок. В обуви прикреплен датчик 11, при нажатии на который пальцем(ами) ноги человека на двигатель подается ток с полярностью, обеспечивающей сжатие губок с сопутствующим зажимом (обжимом) внешнего объекта, например внешней скобы, между губками. При отсутствии нажатия на датчик на двигатель подается напряжение с полярностью, обеспечивающей разведение губок устройства. Устройство может быть дополнено датчиком полного разведения губок, срабатывание которого прекращает подачу тока на двигатель. Для улучшения управляемости устройства устройство может быть дополнено на верхней внутренней стороне обуви вторым датчиком, служащим для разведения губок. Двигатель устройства может быть выполнен как электрический, или пневматический, или гидравлический, или содержать искусственные мышцы, или выполнен как комбинация двух или более перечисленных двигателей. Рабочие области губок могут быть выполнены в виде расчески, причем зубцы каждой губки при их сведении беспрепятственно входят в межзубцовое пространство другой губки. Такое расположение позволяет расширить диапазон размеров объектов, которые устройство может уверенно захватывать.
Пример 3 реализации: устройства, содержащего подвижный элемент, обеспечивающий механическое прикрепление ноги к внешнему объекту своим движением, приводимым двигателем и пружинным элементом. Устройство из примера 2, с целью увеличения силы зажима (обжима) внешнего элемента без увеличения силовых параметров двигателя, дополняется пружиной, сжимающей губки. Таким образом, суммарная сила зажима увеличивается, а суммарная сила разжима уменьшается.
Пример 4 (фиг. 3, фиг. 4) реализации: устройства, которое выполнено в виде манипулятора и содержит два или более пальца с двумя фалангами каждый; устройства, у которого по крайней мере два пальца противопоставлены друг другу; устройства, у которого пальцы в пассивном состоянии прижаты к ноге; устройства, выполненного с возможностью расклинивания в углублениях внешнего объекта. Устройство содержит прикрепленный к обуви манипулятор с двумя или более двухфаланговыми пальцами 12, разделенными на две группы, противопоставленные друг другу. Также устройство содержит датчики в обуви для управления сжатием и разведения пальцев. Пальцы и их привод выполнены с возможностью расположения пальцев в пассивном состоянии прижатыми к обуви. Двигатель и приводы манипулятора выполнены аналогично двигателям и приводам функциональных протезов.
Если внешний объект имеет углубление сравнимое или большее по глубине, чем длина пальца, и имеющее хотя бы один поперечный размер, незначительно превышающий поперечные размеры пальца, то имеется возможность засунуть палец в углубление и согнуть его с усилием в плоскости наименьшей ширины углубления. В этом случае палец будет расклинен в углублении и нога будет прикреплена к внешнему объекту методом расклинивания.
Устройство может быть дополнено датчиками и приводами, с помощью которых разные пальцы ноги управляют разными группами пальцев манипулятора или разные пальцы ноги управляют разными пальцами манипулятора. С целью улучшения качества прикрепления рабочие поверхности зажимающих или обжимающих элементов устройств в примерах 2, 3, 4 могут быть выполнены с насечками и/или покрыты специальным составом, уменьшающим трение. Источник электричества для вариантов устройства, содержащих двигатель, может располагаться в составе устройства, или в костюме или удаленно от человека, в последнем случае электричество подается по фалу.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УХОДА ЗА ПОВЕРХНОСТЯМИ ИЗДЕЛИЙ | 2013 |
|
RU2558900C2 |
| ДЕСМОДРОМНЫЙ КУЛАЧКОВЫЙ ПРИВОД КЛАПАНА ГАЗОРАСПРЕДЕЛИТЕЛЬНОГО МЕХАНИЗМА С РЕГУЛИРОВКОЙ СТЕПЕНИ ОТКРЫТИЯ КЛАПАНА | 2020 |
|
RU2730196C1 |
| Импульсный вариатор | 2016 |
|
RU2617227C2 |
| ВИДЕОПРИЦЕЛ ДЛЯ СТРЕЛЬБЫ ИЗ-ЗА УГЛА ИЗ ОГНЕСТРЕЛЬНОГО ОРУЖИЯ | 2009 |
|
RU2403527C1 |
| Устройство для передвижения человека по канату | 1980 |
|
SU935426A1 |
| Импульсная изменяемая передача вращения | 2016 |
|
RU2629765C2 |
| ДВУНАПРАВЛЕННЫЙ ГИДРОКОМПЕНСАТОР ЗАЗОРОВ ДЕСМОДРОМНОГО ПРИВОДА | 2020 |
|
RU2730187C1 |
| ИМПУЛЬСНЫЙ ВАРИАТОР | 2016 |
|
RU2620278C2 |
| ФИКСАТОР АППАРАТА ВНЕШНЕЙ ФИКСАЦИИ ОТЛОМКОВ КОСТЕЙ КОНЕЧНОСТЕЙ И/ИЛИ ТАЗА | 2024 |
|
RU2837971C1 |
| Фиксатор для стирки обуви в стиральной машине (варианты) | 2021 |
|
RU2797026C1 |
Изобретение относится к области устройств, надеваемых на ноги, позволяющих человеку эффективнее использовать ноги для работы, передвижения, развлечений и другой деятельности в обстоятельствах, когда обычное использование ног затруднено или невозможно. В первую очередь это относится к условиям невесомости в космосе, как внутри обитаемых отсеков, так и в космосе, пониженной гравитации при индивидуальном подводном погружении человека. Сущность изобретения состоит в том, что устройство для механического прикрепления ноги к внешнему объекту, надеваемое на ногу, выполненное с возможностью открепления ноги от ранее прикрепленного внешнего объекта, содержит как минимум один подвижный элемент, обеспечивающий механическое прикрепление ноги к внешнему объекту своим движением, приводимым двигателем и/или пружинным элементом. Пример реализации - устройство выполнено в виде клещей, содержащих две губки 8, скрепленные между собой шарниром 9, одна из губок прикреплена к обуви 2. Губки соединяет между собой возвратно-поступательный электродвигатель постоянного тока 10 с возможностью, под действием двигателя, сведения и разведения губок. В обуви прикреплен датчик 11, при нажатии на который пальцем(ами) ноги человека на двигатель подается ток с полярностью, обеспечивающей сжатие губок с сопутствующим зажимом (обжимом) внешнего объекта, например скобы или перекладины трапа, между губками. При отсутствии нажатия на датчик на двигатель подается напряжение с полярностью, обеспечивающей разведение губок устройства. 11 з. п. ф-лы, 4 ил.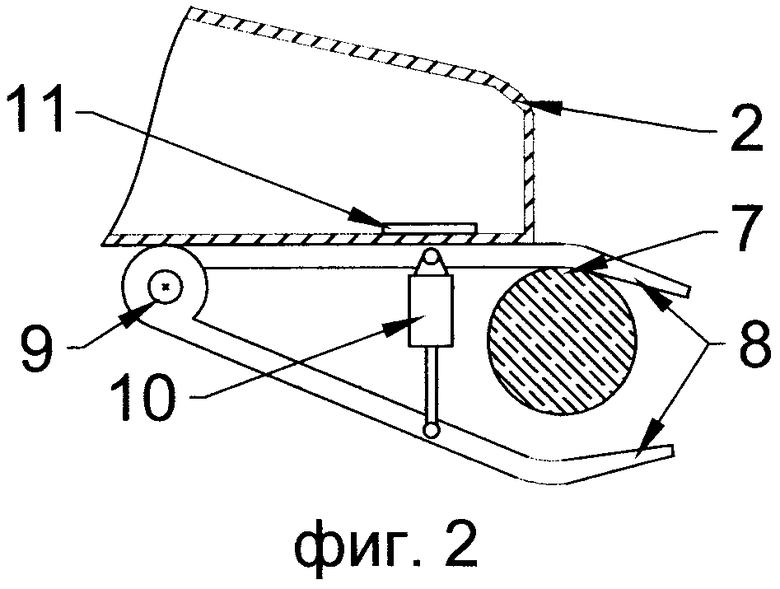
1. Устройство для механического прикрепления ноги к внешнему объекту, надеваемое на ногу, выполненное с возможностью открепления ноги от ранее прикрепленного внешнего объекта, отличающееся тем, что содержит как минимум один подвижный элемент, обеспечивающий механическое прикрепление ноги к внешнему объекту своим движением, приводимым двигателем и/или пружинным элементом.
2. Устройство по п. 1, отличающееся тем, что выполнено в виде защелкивающегося карабина.
3. Устройство по п. 1, отличающееся тем, что выполнено с возможностью расклинивания в углублениях внешнего объекта.
4. Устройство по п. 1, отличающееся тем, что двигатель выполнен как: электрический; или пневматический; или гидравлический; или на основе искусственных мышц; или как комбинация двух или более перечисленных видов двигателей.
5. Устройство по п. 1, отличающееся тем, что форма элементов устройства выполнена оптимизированной для прикрепления к стандартным внешним скобам или трапам для передвижения.
6. Устройство по п. 1, отличающееся тем, что привод подвижного элемента выполнен управляемым движением или приложенным усилием стопы; или движением или приложенным усилием пальца или пальцев ноги или руки; или нервными импульсами, посылаемыми на мышцы пальцев ног или стопы; или возбуждением определенных зон головного мозга человека; или голосом человека; или комбинацией перечисленных методов.
7. Устройство по п. 6, отличающееся тем, что содержит заменяемую индивидуальную часть в виде вкладыша, или носка, или мокасины, или стельки, или обуви.
8. Устройство по п. 1, отличающееся тем, что дополнено лопастью, аналогичной лопасти ласты.
9. Устройство по п. 1, отличающееся тем, что выполнено с возможностью прикрепления ноги к внешнему объекту методом зажима или обжима внешнего объекта или элементов внешнего объекта.
10. Устройство по п. 9, отличающееся тем, что выполнено в виде манипулятора и содержит как минимум два пальца с двумя или больше фалангами каждый.
11. Устройство по п. 10, отличающееся тем, что по крайней мере два пальца противопоставлены друг другу.
12. Устройство по п. 10, отличающееся тем, что выполнено с возможностью расположения пальцев в пассивном состоянии прижатыми к ноге или обуви или в специальных углублениях обуви.
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗОВ, ПРЕИМУЩЕСТВЕННО ЗА ПРЕДЕЛАМИ НАХОДЯЩЕГОСЯ НА ОРБИТЕ КОСМИЧЕСКОГО КОРАБЛЯ | 2000 |
|
RU2167084C1 |
| US 4310070 A, 12.01.1982 | |||
| CN 103566544 A, 12.02.2014 | |||
| US 20070151802 A1, 05.07.2007 | |||
| US 3032141 A1, 01.05.1962 | |||
| US 3968858 A, 13.07.197 | |||

