Изобретение относится к области авиационной техники и может быть использовано в конструкции электросамолетов с расположением на крыльях двух трехдвигательных систем с распределенной тягой разновеликих винтов, два больших из которых, тянущие, вынесены за переднюю кромку второго крыла, а на каждой консоли первого цельноповоротного крыла дупланной схемы - два меньших тянущих винта, размешенных по обе стороны от оси вращения больших винтов, отклонение вверх удлиненных редукторов последних синхронно с отклонением вверх всех меньших винтов обеспечивает выполнение технологии короткого взлета и посадки.
Известен гибридный электросамолет фирмы "Volva Volare" (США) мод. GT4, выполненный из углепластика по аэродинамической схеме "утка" с задним расположением силовой установки, имеющей электромотор с толкающим винтом и генераторным турбодизельным двигателем, представляет собой моноплан со среднерасположенным крылом, имеющим двухкилевое оперение и на его концах концевые крылышки, систему управления и перезаряжаемые аккумуляторные батареи, трехстоечное убирающееся колесное шасси со вспомогательной передней опорой.
Признаки, совпадающие - наличие моноплана со среднерасположенным крылом и трехколесным шасси со вспомогательной передней опорой. Фюзеляж самолета изготовлен из углепластика, что обеспечивает ему несколько избыточную прочность как для четырехместного самолета с взлетным весом 1717 кг. Аэродинамическая схема "утка" электросамолета обеспечивает устойчивость при задней центровке - аккумулятор и двигатели силовой установки (СУ) находятся в кормовой части фюзеляжа. Перезаряжаемые литиево-ионные аккумуляторы электросамолета имеют вес 407 кг и время, необходимое для их быстрой зарядки во время крейсерского полета. На консолях крыла смонтировано разнесенное двухкилевое оперение. Крейсерский полет обеспечивает двухдвигательная СУ: электромотор пиковой/номинальной мощности 400/220 кВт, питаемый от аккумуляторов, вращает толкающий винт, а турбодизельный двигатель (ТДД) мощностью 150 л.с. используется как внутренний источник генерирующей мощности - подпитывает в крейсерском полете аккумуляторные батареи.
Причины, препятствующие поставленной задаче: первая - это то, что электросамолет мод. GT4 с толкающим винтом на конце фюзеляжа, создающим только горизонтальную тягу как при взлетно-посадочных, так и крейсерских режимах полета, имеет сложную схему редуцирования и управления электромотором и ТДД при вращении одного толкающего винта от электромотора, но и снижает стабильность управления и безопасность в случае отказа одного из двух двигателей. Вторая - это то, что перезаряжаемые литиево-иоиные аккумуляторные батареи электросамолета, имеющие вес (порядка 35%) от пустого его веса, что весьма снижает полезную нагрузку и, как следствие, уменьшает весовую отдачу. Третья - это то, что литиево-ионная батарея позволит электросамолету улететь на расстояние в 540 км при крейсерской скорости 296 км/ч, а при падении ее зарядки до 25% от максимального значения включится внутренний источник генерирующей мощности - ТДД и будет в полете подпитывать аккумулятор. Топливный бак самолета может вместить 86,2 литра топлива, что эквивалентно дополнительным 1310 км при общей дальности полета до 1850 км. Все это ограничивает возможность дальнейшего увеличения взлетного веса и веса перезаряжаемых аккумуляторов, но и повышения горизонтальной тяговооруженности и обеспечения возможности выполнения технологии короткого взлета и посадки (КВП).
Известен многодвигательный гибридный электросамолет проекта "E-Thrust" компании "EADS", содержащий планер из композитных материалов, низкорасположенное крыло с концевыми крылышками, последовательную гибридную силовую установку, включающую систему энергонакопления и электротурбину, размещенную на конце фюзеляжа между килей U-образного оперения, вырабатывающую электричество для шести электромоторов, приводящих винтовентиляторы, смонтированные по три на внутренних верхних частях крыла в сгруппированных кольцевых каналах, трехстоечное убирающееся колесное шасси со вспомогательной передней опорой.
Признаки, совпадающие - наличие моноплана с низкорасположенным крылом и трехколесным шасси со вспомогательной передней опорой. Материалом для корпуса электросамолета проекта "E-Thrust" служит углеродное волокно, благодаря чему он будет достаточно легким. Основными его преимуществами, которые будут выгодно отличать его от обычных самолетов, являются мощная аэродинамика, композитный дизайн и, конечно же, последовательная гибридная схема, при которой отдельно размещенная турбина только вырабатывает электричество для шести электромоторов (по три на внутренних секциях крыла). В системе почти нет накопителей электроэнергии. Они сведены до относительно небольших емкостей, подающих энергию для взлетного режима, когда потребление взлетной энергии максимально. Это резко уменьшает вес и стоимость гибридной схемы (мало накопителей) и одновременно позволяет ограничить мощность основной электротурбины (той, что необходима для взлетного и крейсерского режимов полета), то есть сделать ее легче, дешевле, экономичнее. Модифицированная система энергонакопления электросамолета будет нового поколения и выполнена в виде суперконденсаторов. На конце фюзеляжа совместно с электротурбиной смонтировано разнесенное U-образное хвостовое оперение. Крейсерский полет могут обеспечивать шесть электромоторов с винтовентиляторами, смонтированными по три на внутренних частях крыла в сгруппированных кольцевых каналах.
Причины, препятствующие поставленной задаче: первая - это то, что электросамолет проекта "E-Thrust" с винтовентиляторами, смонтированными по три на внутренних частях крыла в сгруппированных кольцевых каналах, создающими только горизонтальную тягу как при взлетно-посадочных, так и крейсерских режимах полета, имеет сложную схему управления электромоторами при независимом вращении всех тянущих винтовентиляторов, что предопределяет возможность эксплуатации с бетонных взлетно-посадочных площадок длиной 1850 м, а также снижает стабильность управления и безопасность в случае отказа одной электротурбины. Вторая - это то, что перезаряжаемая система энергонакопления электросамолета будет нового поколения и выполнена в виде суперконденсаторов, имеющих вес (порядка 25…30%) от пустого его веса, что весьма снижает полезную нагрузку и, как следствие, уменьшает весовую отдачу. Третья - это то, что при отказе одной электротурбины на взлетно-посадочных режимах и при недостатке горизонтальной тяговооруженности, обеспечиваемой сгруппированными винтовентиляторами, имеющими диаметры в равновеликих кольцевых каналах, ограниченных верхней поверхностью крыла и фюзеляжа. Кроме того, тянущие винтовентиляторы, смонтированные но три на внутренних секциях крыла в кольцевых каналах, а те, будучи расположенными по бокам фюзеляжа и в системе распределенной тяги не в самых оптимальных точках самолета, исключая за счет сгруппированных их габаритов аэродинамическое чистое крыло, что весьма ухудшает его аэродинамику. Все это ограничивает возможность дальнейшего увеличения взлетного веса и весовой отдачи и, как следствие, веса перезаряжаемой системы энергонакопления, а также ограничения как повышения горизонтальной тяговооруженности сгруппированных винтовентиляторов и, особенно, при отказе одной его электротурбины, но и обеспечения возможности выполнения технологии КВП.
Наиболее близким к предлагаемому изобретению является многоцелевой самолет КВП модели DO 29 компании "DORNIER", содержащий планер из углепластика, фюзеляж с Т-образным оперением, высокорасположенное крыло с двумя подкрыльевыми мотогондолами, имеющими с задним расположением двигатели и отклоняемые соединительные валы в продолговатых задних обтекателях, передающие мощность на концах последних трехвинтовым винтам, обеспечивающим горизонтальную и их соответствующим отклонением наклонную тягу и трехопорное убирающееся колесное шасси с носовой вспомогательной и главными боковыми опорами.
Признаки, совпадающие - наличие планера из углепластика с высокорасположенным крылом, снабженным двумя мотогондолами, каждая из которых имеет заднюю, продолговатые, вынесенные за соответствующую кромку крыла, подкрыльевые ее части с отклоняемыми винтами, имеет хвостовое Т-образное оперение. Отклоняемые трехлопастные винты, расположенные сзади крыла, обеспечивают маршевую тягу и соответствующим отклонением удлиненных валов вниз на угол -45° от горизонтального положения наклонную тягу для выполнения технологии КВП.
Причины, препятствующие поставленной задаче: первая - это то, что аэродинамический его облик с овальным поперечным сечением фюзеляжа, имеющего высокорасположенное крыло и хвостовое оперение на конце фюзеляжа, форма и длина кормовой части которого определяется различными требованиями, часто противоречивыми, что не способствует снижению массы фюзеляжа и, особенно, высоты стоек главных передних опор колесного шасси при задней вспомогательной короткой его стойке. Вторая - это то, что подкрыльевые мотогондолы с расположенными в них двигателями, имеющими выхлопы, направленные по бокам и назад, осуществляют вредную обдувку задних отклоняемых вниз винтов на крейсерских режимах его полета. Третья - это то, что расположенные на подкрыльевых мотогондолах трехлопастные винты, отклоняющиеся вниз, имеют радиусы, не превышающие высоту установки мотогондол под крылом, что приводит как к усложнению конструкции закрылок крыла, так увеличению высоты передних стоек шасси и уменьшению диаметра таких трехлопастных винтов. Четвертая - это то, что традиционная аэродинамическая его схема, у которой основную подъемную силу, необходимую для полета, создает одно крыло, являясь основной несущей аэродинамической поверхностью, а дополнительную подъемную силу - стабилизатор и фюзеляж, обеспечивающие незначительную их составляющую в общей аэродинамической подъемной силе и, как следствие, предопределяет большую удельную нагрузку на крыло (порядка 340…380 кг/м2), которая будет повышаться пропорционально увеличению его размеров и взлетного веса. Поэтому если использовать традиционную аэродинамическую схему моноплана с высокорасположенным крылом в качестве прототипа и создавать многодвигательный электросамолет КВП на базе данной аэродинамической компоновки, то возможность увеличения весовой отдачи при повышении взлетного веса и дальнейшего уменьшения массы конструкции, но и геометрических размеров планера весьма ограничено.
Предлагаемым изобретением решается задача в указанном выше известном многоцелевом самолете КВП повышения взлетного веса и увеличения весовой отдачи, упрощения конструкции подкрыльевых отклоняемых частей мотогондол и узлов отклонения толкающих винтов, увеличения их диаметра и уменьшения высоты стоек главного шасси, увеличения площади несущих поверхностей планера и уменьшения удельной нагрузки на крыло, повышения транспортной и топливной эффективности.
Отличительными признаками предлагаемого изобретения от указанного выше известного многоцелевого самолета КВП, наиболее близкого к нему, являются наличие того, что он выполнен по дупланной аэродинамической схеме с разновеликими крыльями, большее, второе, из которых смонтировано выше и позади первого меньшего цельноповоротного крыла и концепции разнесенного расположения на крыльях двух трехдвигательных систем с распределенной тягой разновеликих винтов по схеме 4+2, которая наряду двух толкающих винтов, смонтированных с гибридными мотогондолами на втором крыле и выполненных большими, снабжена четырьмя передними мотогондолами с тянущими меньшими винтами первого крыла, выполненными с возможностью работы при различных углах их отклонения в вертикальной плоскости и обеспечением равноудаленного размещения поперечных осей их отклонения как меньших, так и больших винтов от центра масс, но и снабжен возможностью преобразования его с взлетно-посадочной конфигурации гибридного электросамолета с шестивинтовой движительной системой, включающей наряду с двумя большими винтами второго крыла, отклоненными вниз на угол -45°, отклоненные вверх на угол +45° четыре меньших винта первого крыла и обеспечивающей при этом интенсивное обтекание верхней поверхности каждого крыла и бортов фюзеляжа воздушным потоком от меньшей и большей групп винтов, меньшие как четыре, так и два больших из которых имеют их вращение в направлении полета с набеганием по направлению от бортов как передней, так и задней частей фюзеляжа соответственно как верхних лопастей двух левых и двух правых меньших винтов, так и нижней лопасти левого и правого больших винтов, устраняющих как гироскопический эффект, так и создающих более плавное обтекание крыльев и фюзеляжа с уменьшением сопротивления носовой и кормовой его частей за счет эффекта отсоса пограничного слоя перед этими винтами в полетную конфигурацию электросамолета с шести- или четырехвинтовой движительной системой, создающей маршевую тяговооруженность всеми или только меньшими винтами, обеспечивающую третью большую или вторую среднюю крейсерские скорости полета соответственно, но и обратно, при этом в каждом трехвинтовом модуле, винты которого разнесены так, что по обе стороны от оси вращения большего винта второго крыла равноудалены оси вращения двух меньших винта, размещенных на консолях первого крыла с межосевым расстоянием между ними, определяемым из соотношения: 
Кроме того, что каждая гибридная мотогондола, выполненная с передним расположением ОЭМГ и ТВД, последний из которых имеет для отбора взлетной его мощности передний вывод вала, и снабженная отклоняемым вверх и обратно удлиненным редуктором большего тянущего винта, создающего маршевую и наклонную тягу при расположении оси его вращения соответственно вдоль средней линии второго крыла и под смежным углом 133° от горизонтального общего основания последнего к оси его вращения, при этом поперечные оси узлов отклонения меньших и больших винтов размещены в направлении полета соответственно дальше и ближе от центра масс.
Кроме того, с целью упрощения конструкции и исключения узлов отклонения больших винтов при выполнении КВП, повышения несущей способности крыльев и уменьшения их сопротивления первое крыло, размещенное в направлении полета наряду с выносом его вперед, установлено в комбинации с задним уступом и выше второго крыла, имеющего наряду больших толкающих винтов в надкрыльевых гибридных мотогондолах, смонтированного с углом установки +3° и с положительной деградацией по отношению к первому крылу, имеющему при крейсерском полете угол установки +6° и положительный угол поперечного V, улучшающего в многовинтовой движительной системе возможность выполнения укороченного взлета при ускоренном отклонении винтов первого крыла, установленного в промежуточное положение +15°, позволяющее совместно с маршевой тягой больших винтов достичь максимального ускорения при разбеге с одновременным автоматическим отклонением закрылок, обеспечивающим и подъемную силу второго крыла, образуя взлетную его конфигурацию, и возможность автоматического ускоренного синхронного отклонения консолей первого крыла с меньшими винтами на угол с +15° до +45°, позволяющего достичь двух максимальных составляющих взлетной тяги: для движения вперед и вертикального подъема, но и возможность увеличения эффективного его удлинения наряду с уменьшением индуктивного его сопротивления, внешние секции второго крыла, выполненные от гибридных мотогондол с положительным углом поперечного V, имеют в плоскости отрицательной крутки концевых его частей с плавно образованным закруглением стреловидные отогнутые вверх и назад концы большого удлинения, образующие серповидные в плане законцовки, каждая из которых имеет для снижения интенсивности вихреобразования за вторым крылом в потоке воздуха, выходящего из под нижней его поверхности, оснащенной относительно закругленного в плане и отогнутого вверх ее серповидного конца нижним стреловидным крылышком малого удлинения, смонтированным назад и наружу перпендикулярно к отогнутому вверх ее концу, образующим при виде спереди L-образную законцовку.
Кроме того, с целью обеспечения возможности создания при выполнении КВП горизонтальной тяговооруженности, составляющей не менее 0,63 от взлетного веса, и как генерирующей мощности ТВД, составляющей не менее 19,9% от суммарной взлетной мощности СУ с удельной ее нагрузкой ρN=3,26 кг/л.с., так и с обеспечением трех уровней номинальной электрической мощности, составляющих не менее 44% и 27,5% или 13,75% от последней и создающих маршевую тягу соответственно для третьей и второй или первой минимальной крейсерской скорости, при этом пиковая электрическая мощность системы электропривода, включающей наряду четырех электромоторов и двух ОЭМГ, имеет сумму пиковой мощности двух последних, равную не менее 59,7% от пиковой мощности первых четырех электромоторов.
Благодаря наличию этих признаков, позволяющих выполнить многодвигательный электросамолет КВП по конструктивно-силовой дупланной схеме с разновеликими крыльями, первое меньшее цельноповоротное крыло (ПМЦК) из которых смонтировано ниже второго и концепции разнесенного расположения на крыльях двух трехдвигательных систем с распределенной тягой разновеликих винтов (РТРВ). Причем эта схема РТРВ-Х4+2, имея четыре передних двигателя с меньшими тянущими винтами, выполненных с возможностью работы при различных углах их отклонения в вертикальной плоскости и две гибридные мотогондолы с передним расположением двигателей и отклоняемых удлиненных редукторов больших тянущих винтов, позволит сравнительно дешево удвоить горизонтальную тяговооруженность. Кроме того, это также обеспечит возможность преобразования его с взлетно-посадочной конфигурации гибридного шестивинтового электросамолета КВП, имеющего наряду с двумя большими, отклоненными вверх на угол +45° винтами второго крыла и отклоненные вверх на угол +45° четыре меньших передних винта первого крыла в полетную конфигурацию электросамолета с шести- или четырехвинтовой движительной системой, обеспечивающей третью большую или вторую среднюю крейсерские скорости горизонтального полета, но и обратно. Поскольку, синхронно изменяющие вектор тяги отклоняемые тянущие винты меньшей и большей групп, выполненные многолопастными и флюгерно-реверсивными, то первые каждой левой и правой пары меньших винтов, из которых как два внешних, так и два внутренних из них установлены с мотогондолами соответственно как на конце внешних, так и по середине внутренних секций консолей ПМЦК, имеющего его размах, обеспечивающий свободное без перекрытия вращение каждой пары левых и правых винтов передней группы в соответствующем пространстве по обе стороны от бортов фюзеляжа. Что позволит уменьшить вес планера, увеличить полезную нагрузку, повысить весовую отдачу, транспортную и топливную эффективность. В гибридной СУ во время крейсерского полета увеличение генерирующей мощности для электропитания, когда падение заряда литиево-ионной полимерной аккумуляторной батареи снизится до 25% от ее максимума система управления в каждой гибридной мотогондоле автоматически отключит выходной муфтой сцепления больший тянущий винт от ОЭМГ, имеющего с соответствующим винтом ось его вращения, расположенную вдоль линий маршевой его тяги, установит его лопасти во флюгерное положение и включит ТВД, который будет вращать ОЭМГ, работающий в режиме электрогенератора, обеспечивающего подзарядку аккумуляторов в крейсерском режиме полета. Это, наравне с последним, позволит также в полетной конфигурации электросамолета достичь третей или второй, или первой крейсерской скорости полета с шести-, или четырех-, или двухвинтовой движительной системой, соответственно с тремя, или двумя, или одной парой тянущих винтов в соответствующих трехвинтовых модулях, в каждом из которых тянущие большие винты, установленные на втором крыле, снабжены на консолях ПМЦК двумя парами меньших тянущих винтов, разнесенных по обе стороны от гибридной мотогондолы. Наличие этих признаков и такое расположение на крыльях четырех передних меньших и двух задних больших тянущих винтов в центральной части фюзеляжа также благоприятно сказывается на уменьшении сопротивления носовой и кормовой частей фюзеляжа за счет эффекта отсоса пограничного слоя перед этими винтами. При этом высокорасположенные крылья, размещенные, обеспечивая минимальное значение предельно задней центровки, в аэродинамической его компоновке при максимально заднем расположении центра масс, позволяют уменьшить вылет отклоняемых удлиненных редукторов и, особенно, больших винтов. Проведенные различные исследования показывают, что при расположении разнесенных мотогондол на консолях двух крыльев с передней группой и с задней трупной винтов, за счет использования в них тянущих разновеликих винтов, расположенных по схеме РТРВ-Х4+2 с противоположным их вращением между этими группами, можно получить значительное увеличение КПД в каждом трехвинтовом модуле. Поэтому только многодвигательный вариант гибридной СУ позволяет использовать электромоторы, ОЭМГ и ТВД меньшей мощности и, следовательно, меньших габаритов в их поперечнике, что уменьшит модель каждой передней и гибридной мотогондолы. Кроме того, это также позволяет добиться более обтекаемой формы каждой из мотогондол и, соответственно, их меньшее как аэродинамическое сопротивление, так и затенение отклоняемых вверх тянущих винтов при выполнении КВП и, как следствие, уменьшение потерь в наклонной их тяге и повышение тяговооруженности. Все это позволит достичь весьма малошумной гибридной СУ, имеющей ряд способов ее работы и подзарядки пакета литиево-ионных аккумуляторов. Последнее при равномерном распределение заряда перезаряжаемых аккумуляторов обеспечивает как работу электромоторов, ОЭМГ и ТВД без пиковых перегрузок и при минимальной акустической сигнатуре, так и позволяет значительно повысить и безопасность полетов.
Предлагаемое изобретение многодвигательного электросамолета короткого взлета и посадки (МЭСКВП) с гибридными трехдвигательными модулями на высокорасположенных первом и втором крыльях дупланной схемы, Т-образным хвостовым оперением и вариантами его исполнения и использования представлены на фиг.1 и 2.
На фиг.1 на общем виде сбоку изображен высокоскоростной МЭСКВП исполнения ТРРВ-Х4+2 в полетной конфигурации гибридного электросамолета с шестивинтовой движительной системой и отклоненными вверх на угол +45° и четырьмя меньшими, и двумя большими тянущими винтами при выполнении технологии КВП.
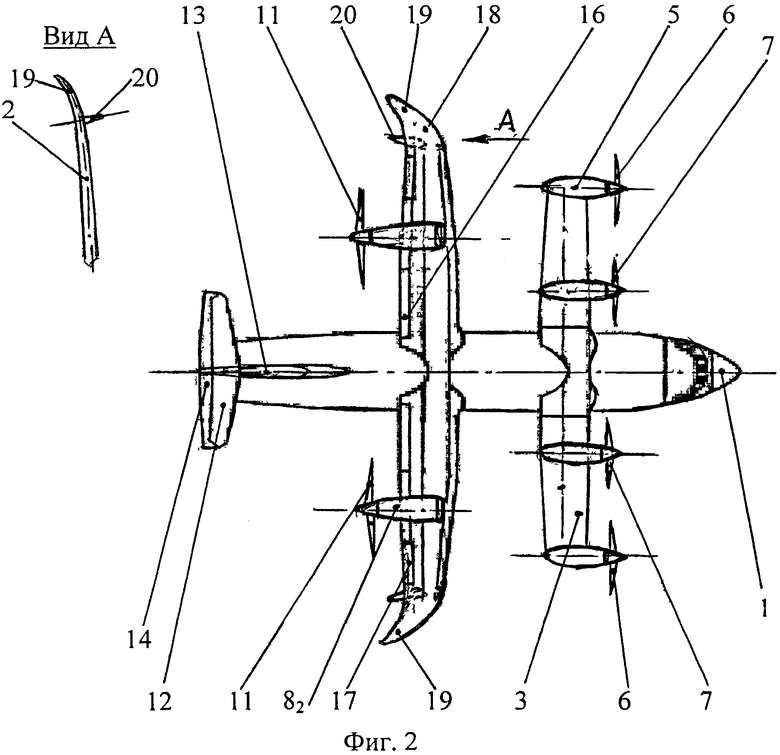
На фиг.2 на общем виде сверху изображен высокоскоростной МЭСКВП исполнения ТРРВ-Х4+2 в полетной конфигурации электросамолета с шестивинтовой движительной системой и отклоняемыми вверх на угол +45° только меньшими тянущими винтами и двумя большими толкающими винтами, обеспечивающими тремя парами этих винтов как три крейсерские скорости горизонтального полета, так и КВП.
Высокоскоростной МЭСКВП, представленный на фиг.1 и 2, содержит фюзеляж 1 и выполнен по дупланной аэродинамической схеме с разновеликими высокорасположенными крыльями, большее, второе 2 (см. фиг.1), из которых смонтировано выше ПМЦК 3 и концепции разнесенного расположения на крыльях 2 и 3 двух трехдвигательных систем. Перед крылом 2 смонтировано ПМЦК 3, отклоняемое вверх на угол +45° и обратно, снабжено на его консолях 4 каплевидной продолговато-обтекаемой формы передними мотогондолами 5 с тянущими винтами меньшей группы. Два внешних 6 и два внутренних 7 из которых установлены соответственно на конце и по середине соответствующих секций консолей 4 ПМЦК 3, имеющего его размах, обеспечивающий свободное без перекрытия вращение каждой пары левых и правых винтов передней группы в соответствующем пространстве по обе стороны от бортов фюзеляжа 1. Четыре передних мотогондолы 5 с электромоторами, вращательно связанные с передними меньшими винтами 6 и 7, выполнены с возможностью работы при различных углах их отклонения в вертикальной плоскости. Две гибридные мотогондолы 81 с передним расположением ОЭМГ и ТВД, оснащенные отклоняемыми вверх на угол +45° и обратно удлиненными редукторами 9 больших винтов 10, смонтированы под вторым крылом 2 (см. фиг.1). Две гибридные мотогондолы 82 с задним расположением ОЭМГ и ТВД, оснащенные не отклоняемыми вниз и обратно большими толкающими винтами 11, смонтированы на консолях второго крыла 2 (см. фиг.2).
В кормовой части фюзеляжа 1 смонтировано Т-образное хвостовое оперение с переустанавливаемым стабилизатором 12 и стреловидным килем 13, имеющим соответственно рули высоты 14 и направления 15. Трапециевидное второе крыло 2, оснащенное закрылками 16 и элеронами 17, выполнено от гибридных мотогондол 8 с положительным углом +4° поперечного V, имеет в плоскости отрицательной крутки концевых его частей 18 с плавно образованным закруглением стреловидные 19 отогнутые вверх и назад концы большого удлинения, образующие серповидные в плане законцовки. Каждая из них под нижней поверхностью крыла 2 оснащена снизу относительно закругленного в плане и отогнутого ее конца вверх стреловидным крылышком 20 малого удлинения, смонтированным назад и наружу перпендикулярно к отогнутому вверх ее концу 19, образующим при виде спереди L-образную законцовку.
Силовая установка выполнена по параллельно-последовательной гибридной технологии силового привода, левые и правые передние мотогондолы 5 которого снабжены электромоторами, вращающими внешние 6 и внутренние 7 тянущие винты передней группы, а гибридные мотогондолы 81/82, смонтированные под/над вторым крылом 2, имеют на конце их удлиненных редукторов 9/задних продолговатых их частях большие винты тянущие 10/толкающие 11 (см. фиг.1/фиг.2). Каждая из гибридных мотогондол 81/82 наряду с ТВД, имеющим для отбора взлетной его мощности передний/задний (см. фиг.1/фиг.2) вывод вала, передающий крутящий момент на входной вал ОЭМГ, выходной вал которого вращательно связан с редуктором соответствующего большего винта, имеются входная, но и выходная муфты сцепления, установленные на соответствующих валах соответственно между ТВД и ОЭМГ, но и между последним и редуктором большего винта (на фиг.1/фиг.2 не показаны). Гибридная СУ оснащена системой электропривода, включающей все электромоторы, аккумуляторные перезаряжаемые батареи, преобразователь энергии с блоком управления силовой передачи, подключающим и отключающим электромоторы и ТВД, переключающим генерирующую мощность и порядок подзарядки аккумуляторов, который обеспечивается как от каждого ОЭМГ, так и одного из них, работающего в режиме электрогенератора от внутреннего источника - ТВД соответственно как при горизонтальном полете в полетной конфигурации четырех- или двухвинтового электросамолета, так и на стоянке при флюгерном положении больших винтов с расположением осей их вращения вдоль линий маршевой их тяги. Поворотные винты двух пар меньших тянущих 6-7 и двух больших тянущих 10/толкающих 11 (см. фиг.1/фиг.2), только тянущие из которых имеют диапазон поворота вверх от 0° до +45° и обратно, выполнены флюгерно-реверсивными с жестким креплением угле- и стеклопластиковых лопастей и возможностью широкого изменения углов их установки. Поворот консолей 4 ПМЦК 3 с мотогондолами 5 и четырехлопастными тянущими винтами 6-7 и удлиненных редукторов 9 с большими тянущими винтами 10, преобразующих его полетную конфигурацию с гибридного шестивинтового электросамолета КВП в шести-, или четырех-, или двухвинтовой электросамолет дупланной схемы, осуществляется с помощью электромеханических приводов (на фиг.1 и 2 не показаны), а выпуск и уборка шасси, управление закрылками 16, элеронами 17 и рулями высоты 14 и направления 15 осуществляется также электрически. Трехопорное убирающееся колесное шасси, вспомогательная опора с мотор-колесом 21 убирается в переднюю нишу фюзеляжа 1, главные боковые опоры с колесами 22 - в бортовые обтекатели 23.
Управление гибридным МЭСКВП обеспечивается общим (изменяющим силу тяги) изменением шага меньших винтов 6-7 на четырех передних мотогондолах 5 и двух больших винтов тянущих 10/толкающих 11 (см. фиг.1/фиг.2), а также отклонением рулевых поверхностей по крену - элеронов 17, рулей направления 15 и высоты 14, работающих совместно с отклонением консолей ПМЦК 3. При взлетно-посадочных режимах полета и выполнении КВП подъемная сила создается крыльями 2 и 3, наклонная/маршевая тяга - четырьмя тянущими винтами 6-7 совместно с двумя большими винтами тянущими 10/толкающими 11, на крейсерских режимах полета - крыльями 2 и 3, маршевая тяга - шести- или четырех- или двухвинтовой движительной системой соответственно тремя, двумя или одной парой соответствующих винтов 6-7, 10/11 (см. фиг.1/фиг.2). После выполнения короткого взлета и при переходе с шестивинтовой движительной системы в четырех- или двухвинтовую движительную систему и если возникает момент тангажа (Mz), то он парируется отклонением рулей высоты 14, создающих, работая позади крыльев 2 и 3, парирующую силу. После установки консолей ПМЦК 3 с меньшими винтами 6-7 и удлиненных редукторов 9 с большими винтами тянущими 10/толкающими 11 с расположением осей их вращения вдоль линий маршевой их тяги осуществляется возможность крейсерского горизонтального полета (см. фиг.1/фиг.2). При выполнении технологии укороченного взлета с шестивинтовой движительной системой его консоли ПМЦК с меньшими винтами 6-7, установленные в промежуточное положение +15° для достижения совместно с маршевой тягой больших винтов 11 максимального ускорения при разбеге с одновременным автоматическим отклонением закрылок 16, обеспечивающим и подъемную силу второго крыла, образуя взлетную его конфигурацию, и возможность автоматического ускоренного синхронного отклонения консолей ПМЦК 3 с меньшими винтами 6-7 на угол с +15° до +45°, позволяющего достичь двух максимальных составляющих взлетной тяги: для движения вперед и вертикального подъема.
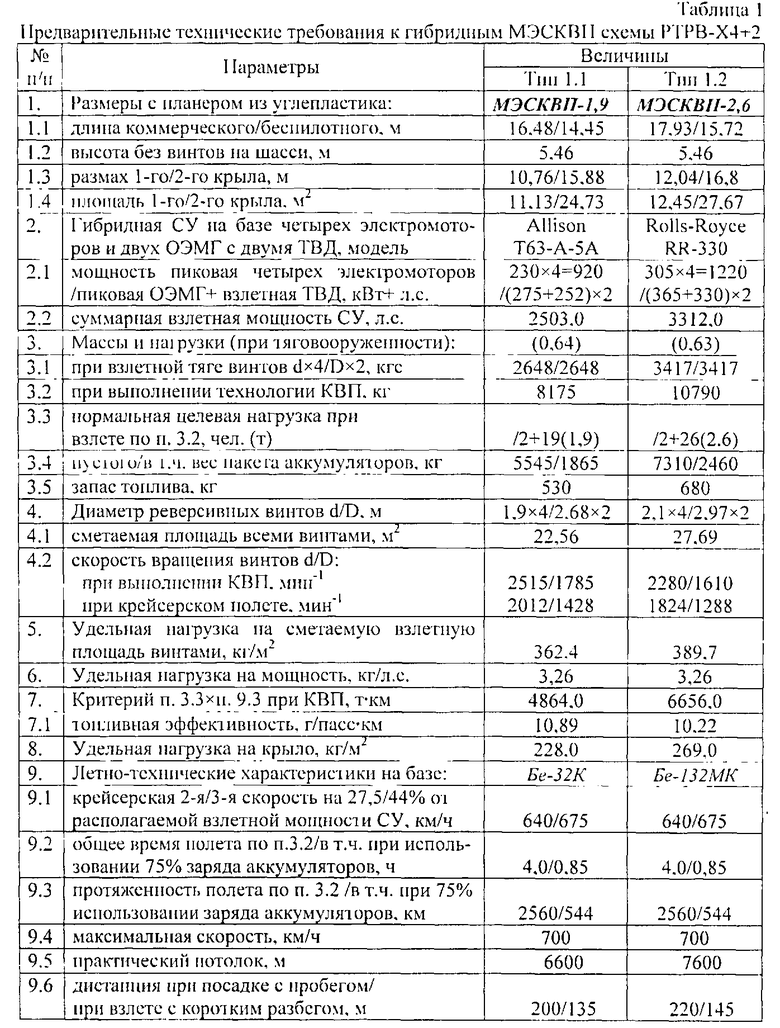
Таким образом, только многодвигательная концепция разнесенного расположения ряда двигателей в двух трехдвигательных системах с распределенной тягой разновеликих винтов может обеспечить максимальную разгрузку, особенно, двух крыльев от действия аэродинамических и массовых сил, а самолеты дупланной схемы со вторым большим крылом, имеющим серповидные законцовки с нижними стреловидными крылышками, отогнутыми назад и наружу, что они весьма эффективны в повышении несущей способности крыла и уменьшении индуктивного его сопротивления, то, следовательно, все они пригодны для дальнейших инженерных приложений. Гибридный МЭСКВП исполнения РТРВ-Х4+2, имеющий без особых массовых затрат и просто реализуемой формы серповидные законцовки крыла с нижними стреловидными крылышками (совместно увеличивающими взлетный вес на 5,2%, скороподъемность и крейсерскую скорость до 10% и снижающими потребление топлива на 5,6%). Поэтому дальнейшие исследования по созданию таких МЭСКВП, используя вышеназванные преимущества, позволит освоить широкое их семейство (см. табл.1). В конечном итоге, широкие эксплуатационные требования к гибридным самолетам нового поколения несомненно приведут к созданию МЭСКВП, особенно, на платформе имеющихся в наличии турбовинтовых самолетов, что позволит весьма сократить сроки их освоения и достойно конкурировать с компаниями "EADS" (ЕвроСоюз) и "Volva Volare" (США), осваивающими и производящими гибридные соответственно многодвигательный электросамолет проекта "E-Thrust" и электросамолет модели GT4.
Наиболее актуальным в современных условиях для этих целей является освоение на платформе самолета МиГ-110 в первую очередь коммерческого МЭСКВП с взлетным весом 15830 кг и для перевозки 40 человек с общей дальностью полета до 2560 км при выполнении технологии КВП. Весить пустой МЭСКВП-4,0, изготовленный из углепластика, будет не более 10700 кг при весе аккумуляторов 3600 кг. В гибридной его СУ, включающей четыре электромотора с меньшими винтами диаметром 2,55 м и два ОЭМГ - с большими винтами диаметром 3,6 м и суммарной пиковой/номинальной их мощности 2860/1573 кВт, имеются генерирующие авиационные турбодизели (АТД) типа Е-8, которые могут предоставить еще 698 кВт (950 л.с.). При благоприятных погодных условиях литиево-полимерная батарея позволит МЭСКВП-4,0 улететь на расстояние в 544 км при крейсерской скорости 640 км/ч. Однако при падении ее заряда до 25% от максимального значения включатся два АТД и будут в полете, вращая ОЭМГ, работающие в режиме электрогенераторов, подпитывать аккумуляторы. Топливный его бак при выполнении КВП вмещает 932 кг топлива, что эквивалентно дополнительным 2016 км. Поэтому, выполняя КВП и имея запас топлива на время полета 0,5 ч, и даже с учетом работы генераторных АТД топливная эффективность для МЭСКВП-4,0 на общей дальности полета 2560 км весьма впечатляюща и составит 9,11 г/пасс·км. В случае выхода из строя двух ОЭМГ с АТД заряда энергии в аккумуляторах достаточно для того, чтобы МЭСКВП-4,0 на минимальной третьей скорости долетел до ближайшего аэропорта и совершил безопасную аварийную посадку.
Важной особенностью применения параллельно-последовательной гибридной технологии силового привода и концепции РТРВ-Х4+2 в МЭСКВП, обеспечивающей качественный рост потребительских свойств, является то, что она масштабируемая и позволяющая наряду с коммерческим МЭСКВП-2,6 создать и легкие МЭСКВП-1,9 с пассажировместимостью 19 человек, и беспилотные тяжелые МЭСКВП-2,1 с взлетным весом 8175 кг, освоенные на платформе, например, самолета модели Бе-32К.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИБРИДНЫЙ ЭЛЕКТРОСАМОЛЕТ КОРОТКОГО ВЗЛЕТА И ПОСАДКИ | 2014 |
|
RU2558168C1 |
| ГИБРИДНЫЙ САМОЛЕТ КОРОТКОГО ВЗЛЕТА И ПОСАДКИ | 2015 |
|
RU2577931C1 |
| САМОЛЕТ КОРОТКОГО ВЗЛЕТА И ПОСАДКИ С ГИБРИДНОЙ СИЛОВОЙ УСТАНОВКОЙ | 2013 |
|
RU2542805C1 |
| МНОГОВИНТОВОЙ ПРЕОБРАЗУЕМЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ | 2014 |
|
RU2548304C1 |
| КРИОГЕННЫЙ ЭЛЕКТРИЧЕСКИЙ ВЕРТОЛЕТ-САМОЛЕТ | 2013 |
|
RU2529568C1 |
| МНОГОВИНТОВОЙ БЕСПИЛОТНЫЙ ЭЛЕКТРОКОНВЕРТОПЛАН | 2014 |
|
RU2547155C1 |
| МНОГОВИНТОВОЙ ГИБРИДНЫЙ ЭЛЕКТРОКОНВЕРТОПЛАН | 2014 |
|
RU2543120C1 |
| МНОГОВИНТОВОЙ ПРЕОБРАЗУЕМЫЙ БЕСПИЛОТНЫЙ ВЕРТОЛЕТ | 2014 |
|
RU2550909C1 |
| КРИОГЕННЫЙ ТУРБОЭЛЕКТРИЧЕСКИЙ САМОЛЕТ КОРОТКОГО ВЗЛЕТА И ПОСАДКИ | 2013 |
|
RU2534676C1 |
| БЕСПИЛОТНЫЙ ТЯЖЕЛЫЙ ЭЛЕКТРОКОНВЕРТОПЛАН | 2013 |
|
RU2532672C1 |
Изобретение относится к области авиационной техники. Многодвигательный электросамолет короткого взлета и посадки содержит фюзеляж с Т-образным оперением, гибридную силовую установку, меньшее цельноповоротное крыло с четырьмя мотогондолами, большее высокорасположенное крыло с двумя подкрыльевыми гибридными мотогондолами, расположенное сзади цельноповоротного крыла, и трехстоечное убирающееся колесное шасси. Гибридная силовая установка включает литиево-ионные аккумуляторы, турбовинтовые двигатели с толкающими винтами и обратимыми мотор-электрогенераторами гибридных мотогондол, а также электродвигатели с тянущими винтами мотогондол. На каждой консоли цельноповоротного крыла тянущие винты размещены по обе стороны от оси вращения толкающего винта консоли высокорасположенного крыла. Изобретение направлено на повышение транспортной и топливной эффективности. 3 з.п. ф-лы, 1 табл., 2 ил.
1. Многодвигательный электросамолет короткого взлета и посадки, содержащий планер из углепластика, фюзеляж с Т-образным оперением, высокорасположенное крыло с двумя подкрыльевыми мотогондолами, имеющими с задним расположением двигатели и отклоняемые соединительные валы в продолговатых задних обтекателях, передающие мощность на концах последних трехвинтовым винтам, обеспечивающим горизонтальную и их соответствующим отклонением наклонную тягу и трехопорное убирающееся колесное шасси с носовой вспомогательной и главными боковыми опорами, отличающийся тем, что он выполнен по дупланной аэродинамической схеме с разновеликими крыльями, большее, второе, из которых смонтировано выше и позади первого меньшего цельноповоротного крыла и концепции разнесенного расположения на крыльях двух трехдвигательных систем с распределенной тягой разновеликих винтов по схеме 4+2, которая наряду двух толкающих винтов, смонтированных с гибридными мотогондолами на втором крыле и выполненных большими, снабжена четырьмя передними мотогондолами с тянущими меньшими винтами первого крыла, выполненными с возможностью работы при различных углах их отклонения в вертикальной плоскости и обеспечением равноудаленного размещения поперечных осей их отклонения как меньших, так и больших винтов от центра масс, но и снабжен возможностью преобразования его с взлетно-посадочной конфигурации гибридного электросамолета с шестивинтовой движительной системой, включающей наряду с двумя большими винтами второго крыла, отклоненными вниз на угол -45°, отклоненные вверх на угол +45° четыре меньших винта первого крыла и обеспечивающей при этом интенсивное обтекание верхней поверхности каждого крыла и бортов фюзеляжа воздушным потоком от меньшей и большей групп винтов, меньшие как четыре, так и два больших из которых имеют их вращение в направлении полета с набеганием по направлению от бортов как передней, так и задней частей фюзеляжа соответственно как верхних лопастей двух левых и двух правых меньших винтов, так и нижней лопасти левого и правого больших винтов, устраняющих как гироскопический эффект, так и создающих более плавное обтекание крыльев и фюзеляжа с уменьшением сопротивления носовой и кормовой его частей за счет эффекта отсоса пограничного слоя перед этими винтами в полетную конфигурацию электросамолета с шести- или четырехвинтовой движительной системой, создающей маршевую тягу всеми или только меньшими винтами, обеспечивающую третью большую или вторую среднюю крейсерские скорости полета соответственно, но и обратно, при этом в каждом трехвинтовом модуле, винты которого разнесены так, что по обе стороны от оси вращения большего винта второго крыла равноудалены оси вращения двух меньших винта, размещенных на консолях первого крыла с межосевым расстоянием между ними, определяемым из соотношения:
2. Многодвигательный электросамолет короткого взлета и посадки по п.1, отличающийся тем, что каждая гибридная мотогондола, выполненная с передним расположением ОЭМГ и ТВД, последний из которых имеет для отбора взлетной его мощности передний вывод вала, и снабженная отклоняемым вверх и обратно удлиненным редуктором большего тянущего винта, создающего маршевую и наклонную тягу при расположении оси его вращения соответственно вдоль средней линии второго крыла и под смежным углом 133° от горизонтального общего основания последнего к оси его вращения, при этом поперечные оси узлов отклонения меньших и больших винтов размещены в направлении полета соответственно дальше и ближе от центра масс.
3. Многодвигательный электросамолет короткого взлета и посадки по п.1, отличающийся тем, что с целью упрощения конструкции и исключения узлов отклонения больших винтов при выполнении КВП, повышения несущей способности крыльев и уменьшения их сопротивления, первое крыло, размещенное в направлении полета наряду с выносом его вперед, установлено в комбинации с задним уступом и выше второго крыла, имеющего наряду больших толкающих винтов в надкрыльевых гибридных мотогондолах, смонтированного с углом установки +3° и с положительной деградацией по отношению к первому крылу, имеющему при крейсерском полете угол установки +6° и положительный угол поперечного V, улучшающего в многовинтовой движительной системе возможность выполнения укороченного взлета при ускоренном отклонении винтов первого крыла, установленного в промежуточное положение +15°, позволяющее совместно с маршевой тягой больших винтов достичь максимального ускорения при разбеге с одновременным автоматическим отклонением закрылок, обеспечивающим и подъемную силу второго крыла, образуя взлетную его конфигурацию, и возможность автоматического ускоренного синхронного отклонения консолей первого крыла с меньшими винтами на угол с +15° до +45°, позволяющего достичь двух максимальных составляющих взлетной тяги: для движения вперед и вертикального подъема, но и возможность увеличения эффективного его удлинения наряду с уменьшением индуктивного его сопротивления, внешние секции второго крыла, выполненные от гибридных мотогондол с положительным углом поперечного V, имеют в плоскости отрицательной крутки концевых его частей с плавно образованным закруглением стреловидные отогнутые вверх и назад концы большого удлинения, образующие серповидные в плане законцовки, каждая из которых имеет для снижения интенсивности вихреобразования за вторым крылом в потоке воздуха, выходящего из под нижней его поверхности, оснащенной относительно закругленного в плане и отогнутого вверх ее серповидного конца нижним стреловидным крылышком малого удлинения, смонтированным назад и наружу перпендикулярно к отогнутому вверх ее концу, образующим при виде спереди L-образную законцовку.
4. Многодвигательный электросамолет короткого взлета и посадки по п.1, отличающийся тем, что, с целью обеспечения возможности создания при выполнении КВП горизонтальной тяговооруженности, составляющей не менее 0,63 от взлетного веса, и как генерирующей мощности ТВД, составляющей не менее 19,9% от суммарной взлетной мощности СУ с удельной ее нагрузкой ρN=3,26 кг/л.с., так и с обеспечением трех уровней номинальной электрической мощности, составляющих не менее 44% и 27,5% или 13,75% от последней и создающих маршевую тягу соответственно для третьей и второй или первой минимальной крейсерской скорости, при этом пиковая электрическая мощность системы электропривода, включающей наряду четырех электромоторов и двух ОЭМГ, имеет сумму пиковой мощности двух последних, равную не менее 59,7% от пиковой мощности первых четырех электромоторов.
Где:
Lм - межосевое расстояние,
D и d - диаметры больших и меньших винтов соответственно.
| US 6655631 B2, 02.12.2003; | |||
| JP 2006205755 A, 10.08.2006; | |||
| МНОГОЦЕЛЕВОЙ КРИОГЕННЫЙ КОНВЕРТОПЛАН | 2009 |
|
RU2394723C1 |

