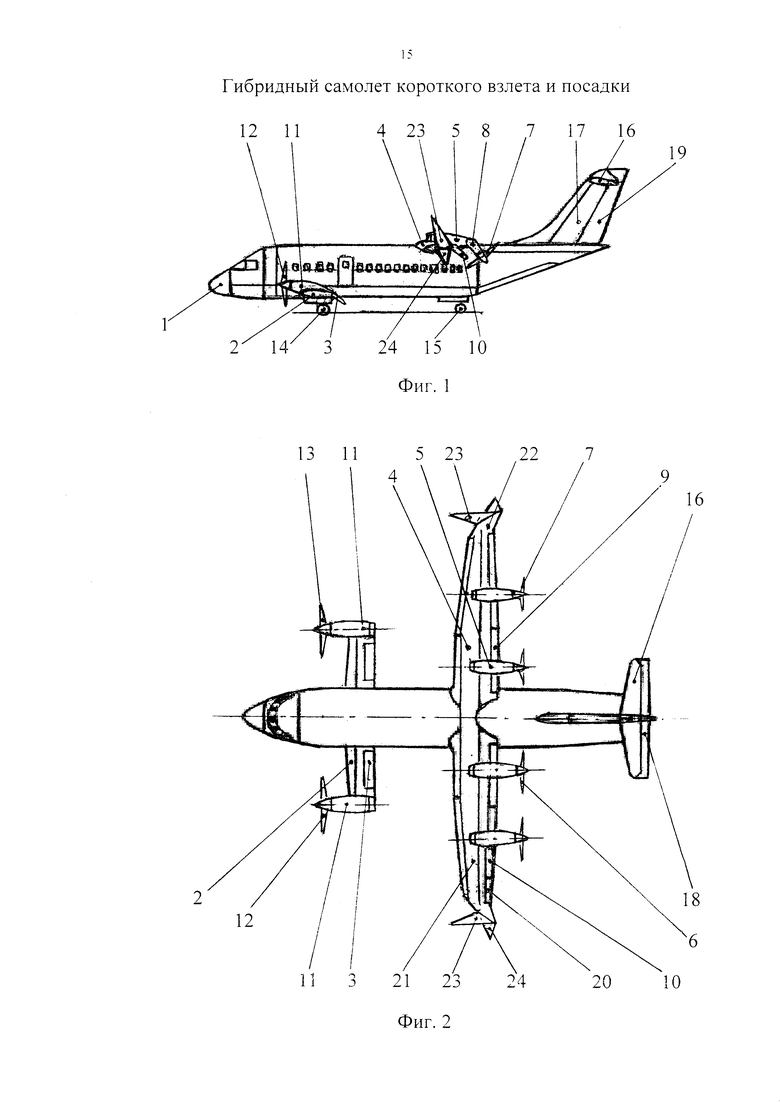
Изобретение относится к области авиационной техники и может быть использовано в конструкции гибридных самолетов с расположением на крыльях двух трехдвигательных систем с распределенной тягой разновеликих винтов, два больших из которых тянущие смонтированы на концах первого крыла, а на каждой консоли второго крыла дупланной схемы два меньших толкающих винта, размещенных по обе стороны от оси вращения больших винтов и имеющих отклонение вниз удлиненных их редукторов с синхронным отклонением закрылок двух крыльев, обеспечивающее выполнение технологии короткого взлета и посадки (КВП).
Известен многодвигательный гибридный электросамолет проекта "E-Thrust" компании "EADS", содержащий планер из композитных материалов, низкорасположенное крыло с концевыми крылышками, последовательную гибридную силовую установку, включающую систему энергонакопления и электротурбину, размещенную на конце фюзеляжа между килей U-образного оперения, вырабатывающую электричество для шести электромоторов, приводящих вентиляторы, смонтированные по три на внутренних верхних частях крыла в сгруппированных кольцевых каналах, трехстоечное убирающееся колесное шасси со вспомогательной передней опорой.
Признаки, совпадающие - наличие моноплана с низкорасположенным крылом и трехколесным шасси со вспомогательной передней опорой. Материалом для корпуса электросамолета проекта "E-Thrust" служит углеродное волокно, благодаря чему он будет достаточно легким. Основными его преимуществами, которые будут выгодно отличать его от обычных самолетов, являются мощная аэродинамика, композитный дизайн и, конечно же, последовательная гибридная схема, при которой отдельно размещенная турбина только вырабатывает электричество для шести электромоторов (по три на внутренних секциях крыла). В системе почти нет накопителей электроэнергии. Они сведены до относительно небольших емкостей, подающих энергию для взлетного режима, когда потребление взлетной энергии максимально. Это резко уменьшает вес и стоимость гибридной схемы (мало накопителей) и одновременно позволяет ограничить мощность основной электротурбины (той, что необходима для взлетного и крейсерского режимов полета), то есть сделать ее легче, дешевле, экономичнее. Модифицированная система энергонакопления электросамолета будет нового поколения и выполнена в виде суперконденсаторов. На конце фюзеляжа совместно с электротурбинной смонтировано разнесенное U-образное хвостовое оперение. Крейсерский полет могут обеспечивать шесть электромоторов с вентиляторами, смонтированными по три на внутренних частях крыла в сгруппированных кольцевых каналах.
Причины, препятствующие поставленной задаче: первая - это то, что электросамолет проекта "E-Thrust" с электровентиляторами, смонтированными по три на внутренних частях крыла в сгруппированных кольцевых каналах, создающими только горизонтальную тягу как при взлетно-посадочных, так и крейсерских режимах полета, имеет сложную схему управления электромоторами при независимом вращении всех тянущих вентиляторов, что предопределяет возможность эксплуатации с бетонных взлетно-посадочных площадок длиной 1850 м, а также снижает стабильность управления и безопасность в случае отказа одной электротурбины. Вторая - это то, что перезаряжаемая система энергонакопления электросамолета будет нового поколения и выполнена в виде суперконденсаторов, имеющих вес (порядка 25…30%) от пустого его веса, что весьма снижает полезную нагрузку и, как следствие, уменьшает весовую отдачу. Третья - это то, что при отказе одной электротурбины на взлетно-посадочных режимах и при недостатке горизонтальной тяговооруженности, обеспечиваемой сгруппированными электровентияторами, имеющими диаметры в равновеликих кольцевых каналах, ограниченных верхней поверхностью крыла и фюзеляжа. Кроме того, тянущие электровентиляторы, смонтированные по три на внутренних секциях крыла в кольцевых каналах, а те, будучи расположенными по бокам фюзеляжа и в системе распределенной тяги не в самых оптимальных точках самолета, исключая за счет сгруппированных их габаритов аэродинамическое чистое крыло, что весьма ухудшает его аэродинамику. Все это ограничивает возможность дальнейшего увеличения взлетного веса и весовой отдачи и, как следствие, веса перезаряжаемой системы энергонакопления, а также ограничения как повышения горизонтальной тяговооруженности сгруппированных электровентиляторов и, особенно, при отказе одной его электротурбины, но и обеспечения возможности выполнения технологии КВП.
Известен электросамолет проекта "Ce-Liner" компании "Bauhaus Luftfahrt" (Германия), представляющий собой моноплан с крылом, имеющим внешние части крыла С-образной формы, концы последних отклонены к двум мотогондолам, смонтированным на горизонтальных пилонах по бокам фюзеляжа и имеющим закапотированные электромоторы с вентиляторами, содержит в фюзеляже из углепластика систему управления и заменяемые аккумуляторные батареи, однокилевое хвостовое оперение и трехстоечное убирающееся колесное шасси, с носовой вспомогательной опорой.
Признаки, совпадающие - наличие задних мотогондол с соосными электровентиляторами, создающими только горизонтальную тягу, содержит систему управления, равномерно распределяющую зарядку аккумуляторов самолета проекта "Ce-Liner" между двумя электромоторами с тянущими вентиляторами, обеспечивающими скорость до 750 км/ч на высоте полета более 8500 м и при дальности полета до 1700 км, однокилевое хвостовое оперение и трехстоечное убирающееся колесное шасси с носовой вспомогательной опорой. Минимальное время подзарядки батарей будет два часа, поэтому для быстрого оборота батарей будет осуществляться их обмен. В этом случае 16 стандартных контейнеров LD3 с литиево-ионными аккумуляторными батареями могут быть заменены в течение 30-минутного время обработки данных. Электросамолет проекта "Ce-Liner" может в перспективе стать, гибридным самолетом с электротурбиной, вырабатывающей электричество для подзарядки батарей.
Причины, препятствующие поставленной задаче: первая - это то, что заднее размещение на конце и по бокам фюзеляжа с однокилевым хвостовым оперением двух мотогондол с закапотированными соосными электровентиляторами предопределяет конструктивно сложное крыло необычной формы, выполненное в поперечной плоскости С-образной конфигурации со сложной механизацией и рулевыми поверхностями крыла - элевонами, что усложняет конструкцию и продольную управляемость. Вторая - это то, что диаметры закапотированных соосных электровентиляторов ограничены размером кольцевых их обтекателей и, как следствие, ограничивает горизонтальную тяговооруженность. Третья - это то, что заменяемые литиево-ионные аккумуляторы электросамолета Ce-Liner с пассажировместимостью 190 человек, который будет на 30 тонн тяжелее Airbus А320, это значительно снижает полезную нагрузку и, следовательно, уменьшает весовую отдачу. Четвертая - это то, что взлетная тяга тянущих электровентиляторов обеспечивается только в горизонтальном направлении, а отсутствие возможности изменения в вертикальной плоскости направления вектора тяги этих электровентиляторов и, как следствие, возможного уменьшения посадочной скорости, обеспечиваемой при выполнении технологии КВП, этот электросамолет Ce-Liner не может, что значительно уменьшает безопасность и, в частности, создает сложность продольного и поперечного управления с крылом С-образной формы, особенно, на взлетно-посадочных режимах полета, когда у такого крыла вектор его тяги не уравновешивается. Пятая - это то, что традиционная аэродинамическая его схема, у которой основную подъемную силу, необходимую для полета, создает одно крыло, являясь основной несущей аэродинамической поверхностью, а дополнительную подъемную силу - горизонтальные пилоны мотогондол и фюзеляж, обеспечивающие незначительную их составляющую в общей аэродинамической подъемной силе и, как следствие, предопределяет большую удельную нагрузку на крыло (порядка 380…430 кг/м2), которая будет повышаться пропорционально увеличению его размеров и взлетного веса. Поэтому если использовать такую аэродинамическую схему моноплана с низкорасположенным крылом С-образной формы в качестве прототипа и создавать гибридный электросамолет КВП на базе данной аэродинамической компоновки, то возможность увеличения весовой отдачи при повышении взлетного веса и дальнейшего уменьшения массы конструкции, но и геометрических размеров планера весьма затруднено. Все это ограничивает возможность также дальнейшего увеличения взлетного веса и веса заменяемых аккумуляторных батарей, но и повышения горизонтальной тяговооруженности и выполнения технологии КВП.
Наиболее близким к предлагаемому изобретению является криогенный электрический вертолет-самолет (Россия) [патент RU 2529568, 15.08.2013], выполненный по дупланной схеме, содержит на крыльях подкрыльные электрические и гибридные мотогондолы соответственно с четырьмя передними винтами и двумя задними винтами, размещенными соответственно на цельноповоротных консолях и на концах поворотных редукторов, и имеет фюзеляж, хвостовое оперение, двигатели параллельно-последовательной гибридной силовой установки, передающие мощность на соответствующие поворотные винты и трехопорное убирающееся колесное шасси с носовой вспомогательной и главными боковыми опорами.
Признаки, совпадающие - наличие дупланной схемы с высокорасположенными двумя крыльями, снабженными четырьмя электрическими и двумя гибридными мотогондолами соответственно с меньшими тянущими и двумя большими толкающими винтами, размещенными соответственно на цельноповоротных консолях первого крыла и на концах поворотных редукторов второго крыла. Поворотные тянущие меньшие и толкающие большие винты, расположенные спереди и сзади соответствующих кромок первого и второго крыла, обеспечивают горизонтальную тягу и соответствующим отклонением вверх или вниз от горизонтального положения вертикальную на угол 90° или наклонную тягу на угол 45° соответственно при выполнении технологии вертикального взлета и посадки (ВВП) или КВП.
Причины, препятствующие поставленной задаче: первая - это то, что подкрыльные гибридные мотогондолы второго крыла с расположенными в них газотурбинными двигателями, имеющими выхлопы, направленные с боку и назад, осуществляют вредную обдувку на поворотных редукторах задних больших винтов на вертолетных и на самолетных режимах его полета. Что также усложняет конструкцию второго крыла с такими мотогондолами и, как следствие, увеличивает его массу. Вторая - это то, что расположенные на крыльях электрические и гибридные мотогондолы с поворотными винтами различного диаметра и, особенно, задние большего диаметра, отклоняющиеся вверх и вниз для выполнения соответственно ВВП и КВП, работают по тянущей и толкающей схеме и имеют радиусы, не превышающие высоту установки их гибридных мотогондол на втором крыле, что усложняет конструкцию и увеличивает высоту стоек главного заднего шасси, но и уменьшает весовую отдачу. Третья - это то, что электрические мотогондолы с меньшими тянущими винтами, смонтированными на цельноповоротных консолях первого крыла, должны быть выполнены с возможностью их работы при различных углах их поворота в вертикальной плоскости, что усложняет конструкцию. Четвертая - это то, что цельноповоротное первое крыло с тянущими меньшими винтами с увеличением его угла атаки до 45° на переходных режимах полета при выполнении КВП создает опасность появления на первом крыле срыва потока до создания винтами необходимой наклонной тяги, что снижает безопасность и ухудшает продольную стабильность при выполнении КВП. Кроме того, для аэродромного выруливания, но и для его разгона при выполнении короткого разбега используется только горизонтальная тяга всех винтов, что весьма ухудшает топливную эффективность. Поэтому если использовать дупланную аэродинамическую схему с высокорасположенными крыльями в качестве прототипа и создавать гибридный самолет КВП на базе данной компоновки, то возможность увеличения весовой отдачи при повышении взлетного веса и дальнейшего уменьшения массы конструкции, но и улучшения топливной эффективности весьма ограничено.
Предлагаемым изобретением решается задача в указанном выше известном криогенном электрическом вертолете-самолете повышения взлетного веса и увеличения весовой отдачи при выполнении КВП, увеличения диаметра передних больших винтов и уменьшения высоты стоек главного шасси, упрощения конструкции гибридных мотогондол и исключения обдува задних толкающих винтом выхлопными газами двигателей, повышения дальности полета, транспортной и топливной эффективности.
Отличительными признаками предлагаемого изобретения от указанного выше известного криогенного электрического вертолета-самолета, наиболее близкого к нему, являются наличие того, что он выполнен с главной турбовинтовой силовой установкой (СУ) и разноуровневыми крыльями, первое из которых низкорасположенное смонтировано впереди второго высокорасположенного крыла и концепции разнесенного расположения на крыльях двух трехдвигательных систем с распределенной тягой разновеликих винтов по схеме 2+4, в четырехвинтовой из которой наряду двух внутренних и двух внешних надкрыльных мотогондол с толкающими меньшими винтами второго крыла, смонтированными посередине соответствующих закрылок последнего, снабжена двумя тянущими большими винтами, смонтированными на концах первого крыла в надкрыльных мотогондолах, имеющих главные боковые опоры переднего подкрыльного шасси, снабженного управляемой вспомогательной задней опорой со спаренными электрическими мотор-колесами, которые, обеспечивая аэродромное выруливание и его разгон при выполнении короткого разбега до скорости движения 25% от взлетной скорости, имеют электропитание от последовательной гибридной вспомогательной СУ, в которой отдельно размещенная турбина вырабатывает электричество и для каждого мотор-колеса, но и снабжен возможностью преобразования его с взлетно-посадочной конфигурации гибридного самолета с задними спаренными электрическими мотор-колесами и шестивинтовой движительной системой, включающей наряду с двумя большими винтами первого крыла, оснащенного по всему размаху закрылками, имеет на надкрыльных мотогондолах второго четыре меньших винта, создающих при выполнении короткого разбега промежуточное их отклонение от горизонтального положения на угол -15° и имеющих после ускоренного вниз отклонения с угла -15° на угол -60° соответственно при достижении скорости движения 85% и 95% от взлетной его скорости конечное положение при размещении оси их вращения параллельно средней линии закрылок второго крыла, и обеспечивающей при этом интенсивное обтекание верхней поверхности каждого крыла и бортов фюзеляжа воздушным потоком от меньшей и большей групп винтов, толкающие как четыре, так и два тянущих из которых соответственно имеют их вращение в направлении полета с набеганием по направлению от бортов как задней, так и передней частей фюзеляжа соответственно как нижних лопастей двух левых и двух правых меньших винтов, так и верхней лопасти левого и правого больших винтов, устраняющих гироскопический эффект и создающих более плавное обтекание крыльев и фюзеляжа с уменьшением сопротивления носовой и кормовой его частей за счет эффекта отсоса пограничного слоя перед этими винтами в полетную конфигурацию самолета с шести- или четырехвинтовой движительной системой, создающей маршевую тяговооруженность всеми или только меньшими винтами, обеспечивающую соответственно третью максимальную или вторую среднюю крейсерские скорости полета, но и обратно, при этом в каждом трехвинтовом модуле, винты которого разнесены в плане так, что по обе стороны от оси вращения большего винта равноудалены оси вращения двух меньших винтов, размещенных на консолях второго крыла с межосевым расстоянием между ними, определяемым из соотношения: Lмо=8/9·(D+d), м (где: Lм - межосевое расстояние, D и d - диаметры больших и меньших винтов соответственно), так и возможность достижения первой меньшей крейсерской скорости полета, обеспечиваемой максимальным отклонением закрылок двух крыльев и тягой двух только внутренних винтов меньшей группы, а два внешних из которой с двумя большими винтами устанавливаются во флюгерное положение, причем при выполнении КВП большие и меньшие винты обеспечивают возможность управления скоростью разбега и создания управляющих моментов, образуемых при максимальном изменении вектора тяги меньших винтов с автоматическим синхронным максимальным отклонением закрылок двух крыльев, при этом с целью снижения индуктивного сопротивления, повышения подъемной силы и эффективного удлинения трапециевидного второго крыла концевые его части от внешних надкрыльных мотогондол, выполненные с отрицательным углом -5° поперечного V, имеют в плоскости отрицательной их крутки ромбовидные в плане законцовки, каждая из которых имеет острый угол, вынесенный за заднюю кромку крыла, и большие по величине углы переменной и прямой стреловидности соответственно передней и задней ее кромок, чем у соответствующих кромок крыла, задняя из которых выполнена с обратной стреловидностью, но и на ее конце от вершины тупого ее угла скругленные при виде сзади соединения с ромбовидными при виде сбоку концевыми шайбами, имеющими верхние и нижние разновеликие отклоненные наружу плоские шайбы соответственно обратной и прямой стреловидности, отталкивающие поток воздуха вверх и назад, выходящий в вихревом обтекании второго крыла относительно его верхней большей плоской шайбы и снижающие относительно его законцовок интенсивность вихреобразо-вания в потоке воздуха, перетекающего из под нижней к верхней поверхности крыла.
Кроме того, второе крыло, выполненное низкорасположенным с концевыми его частями от внешних мотогондол, смонтированными с положительным углом +5° поперечного V, размещено ниже первого крыла.
Кроме того, главная дизель-электрическая СУ снабжена как парой левых и парой правых задних мотогондол с электромоторами, имеющими между собой и их парами одинаковые по пиковой мощности типоразмеры соответствующих меньших винтов второго крыла, так и смонтированными на первом крыле гибридными мотогондолами, в каждой из последних, выполненной с большим по взлетной мощности типоразмером, равным сумме пиковых мощностей четырех задних электрических мотогондол, и снабженной наряду с обратимым электромотором-генератором (ОЭМГ), оснащена турбодизельным двигателем (ТДД), причем каждая гибридная мотогондола, выполненная с передним последовательным расположением большего винта на выходном валу его редуктора, ОЭМГ и ТДД, последний из которых для отбора взлетной его мощности выполнен с передним выводом вала, и имеющая входную и выходную электромагнитные муфты сцепления на соответствующих валах ОЭМГ, обеспечивающие дистанционное управление их сцеплением/расцеплением соответственно с выходным валом ТДД и входным валом редуктора большего винта, позволяют реализовать в каждой из них как совместную работу ТДД с ОЭМГ, работающего в режиме электрогенератора, при передаче от внутреннего источника генерирующей номинальной мощности с ТДД на ОЭМГ во время крейсерской полетной конфигурации четырех- или двухвинтового электросамолета с максимальной или номинальной взлетной массой, так и самостоятельную работу ТДД и ОЭМГ, работающего в режиме электромотора, при поочередной передаче их номинальной мощности на больший винт в случае отказа электрической и механической части соответственно ОЭМГ и ТДД для выполнения посадочной полетной конфигурации четырех- или шестивинтового электросамолета с номинальной или максимальной взлетной массой.
Кроме того, с целью обеспечения возможности выполнения технологии КВП при горизонтальной тяговооруженности, составляющей не менее 0,63 от номинальной взлетной его массы, создаваемой суммарной взлетной мощностью СУ с удельной ее нагрузкой ρN=3,15 кг/л.с, но и обеспечивающей как генерирующую номинальную мощность ТДД, располагающего не менее 18,68% от суммарной взлетной мощности СУ, так и три уровня номинальной электрической мощности, составляющей не менее 41,2%, 27,5% или 13,75% от суммарной взлетной мощности СУ и создающей маршевую тягу соответственно для третьей, второй или первой крейсерской скорости полета, при этом пиковая электрическая мощность системы электропривода, включающей наряду четырех электромоторов и двух ОЭМГ, имеет сумму пиковой мощности последних равную не менее 50,0% от пиковой мощности четырех электромоторов.
Благодаря наличию этих признаков позволит выполнить гибридный самолет КВП с разновеликими низко- и высокорасположенным крыльями дупланной схемы, первое меньшее из которых смонтировано спереди второго крыла и по концепции размещения на крыльях двух трехдвигательных систем с распределенной тягой разновеликих винтов (РТРВ), диаметры которых определяются из соотношения: 
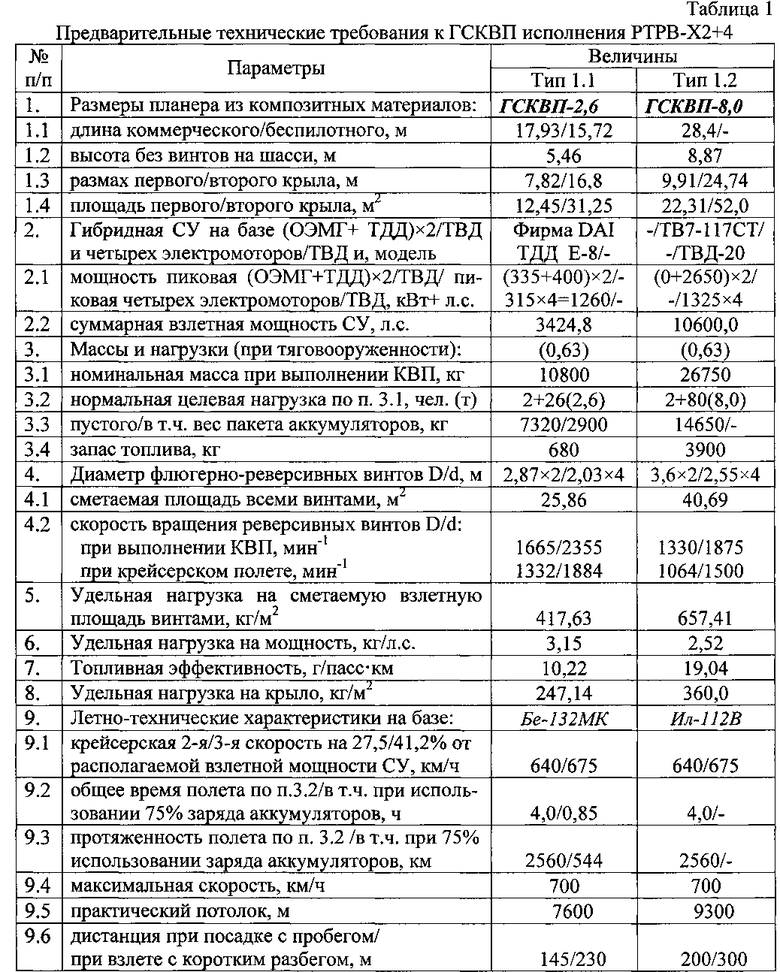
Предлагаемое изобретение гибридного самолета короткого взлета и посадки (ГСКВП) с двумя трехдвигательными модулями на низкорасположенном первом и высокорасположенном втором крыле дупланной схемы, Т-образным хвостовым оперением и вариантами его использования представлены на фиг. 1 и 2.
На фиг. 1 на общем виде сбоку изображен высокоскоростной ГСКВП исполнения РТРВ-Х2+4 в полетной конфигурации гибридного электросамолета при выполнении технологии КВП с шестивинтовой движительной системой, имеющей два больших тянущих и отклоненные вниз на угол -60° четыре меньших толкающих винта.
На фиг. 2 на общем виде сверху изображен высокоскоростной ГСКВП исполнения РТРВ-Х2+4 в полетной конфигурации электросамолета с шестивинтовой движительной системой, включающей два больших тянущих винта и четыре толкающих меньших винта и обеспечивающей тремя парами разнесенных винтов как три крейсерские скорости горизонтального полета, так и выполнение технологии КВП.
Высокоскоростной ГСКВП, представленный на фиг. 1 и 2, содержит фюзеляж 1 и выполнен по дупланной аэродинамической схеме с разновеликими крыльями, меньшее низкорасположенное первое крыло 2 из которых, имеющее закрылки 3, смонтировано спреди высокорасположенного второго крыла 4 и концепции разнесенного расположения на крыльях 2 и 4 двух трехдвигательных систем (см. фиг. 2). Трапециевидное крыло 4 снабжено на его консолях надкрыльными мотогондолами 5 с электромоторами, вращательно связанные с толкающими отклоняемыми вниз меньшими винтами 6 и 7. Два внутренних 6 и два внешних 7 меньших винта из которых снабжены поворотными в вертикальной плоскости их редукторами 8, размещенными над крылом 4 и смонтированными посередине соответствующих его закрылок 9 и 10. Две передние надкрыльные гибридные мотогондолы 11 с передним расположением ТДД и ОЭМГ, вращательно связанными с тянущими большими винтами 12 и 13, смонтированы над первым крылом 2 и снабжены главными боковыми опорами переднего подкрыльного колесного шасси 14, снабженного управляемой вспомогательной задней опорой со спаренными электрическими мотор-колесами 15 (см. фиг. 1).
Развитое Т-образное хвостовое оперение со стабилизатором 16 и стреловидным килем 17, имеющее соответственно рули высоты 18 и направления 19. Второе крыло 4 (см. фиг. 2) оснащено внутренними 9 и внешними 10 закрылками, элеронами 20 и выполнено от внешних надкрыльных мотогондол 5 с отрицательным углом -5° поперечного V, имеет в плоскости отрицательной крутки концевых его частей 21 ромбовидные в плане законцовки 22, каждая из которых имеет и острый угол, вынесенный за заднюю кромку крыла, и большие по величине углы переменной и прямой стреловидности соответственно передней и задней ее кромок, чем у соответствующих кромок крыла, задняя из которых выполнена с обратной стреловидностью, и на ее конце от вершины тупого ее угла скругленные при виде сзади соединения с ромбовидными при виде сбоку концевыми шайбами, имеющими верхние 23 и нижние 24 разновеликие отклоненные наружу крылышки соответственно обратной и прямой стреловидности, снижающие интенсивность вихреобразования в потоке воздуха, перетекающего из под нижней к верхней поверхности второго крыла относительно его законцовок 22.
Силовая установка выполнена по параллельно-последовательной гибридной технологии силового привода, пара левых и пара правых надкрыльных мотогондол 5 которого снабжены электромоторами, вращающими внутренние 6 и внешние 7 толкающие меньшие винты посредством соответствующих поворотных редукторов 8. Две передние гибридные мотогондолы 11, смонтированные над первым крылом 2, имеют тянущие большие винты 12 и 13 (см. фиг. 2). Каждая из гибридных мотогондол 11 наряду с ТДД, имеющим для отбора взлетной его мощности передний вывод вала, передающий крутящий момент на входной вал ОЭМГ, выходной вал которого вращательно связан с редуктором соответствующего большего винта, имеются входная, но и выходная муфты сцепления, установленные на соответствующих валах соответственно между ТДД и ОЭМГ, но и между последним и редуктором большего винта (на фиг. 1 и 2 не показаны). Гибридная СУ оснащена системой электропривода, включающей все электромоторы, аккумуляторные перезаряжаемые батареи, преобразователь энергии с блоком управления силовой передачи, подключающим и отключающим электромоторы и ТДД, переключающим генерирующую мощность и порядок подзарядки аккумуляторов, который обеспечивается от каждого ОЭМГ, но и одного из них, работающего в режиме электрогенератора от внутреннего источника - ТДД соответственно при горизонтальном полете в полетной конфигурации четырех- или двухвинтового электросамолета, но и на стоянке при флюгерном положении больших винтов. Две пары меньших толкающих винтов 6 и 7 с поворотными их редукторами 8, имеющими диапазон поворота вниз от 0° до -60° и обратно, и два больших тянущих винта 12 и 13 (см. фиг. 2), все из которых выполнены флюгерно-реверсивными с жестким креплением угле- и стеклопластиковых лопастей и возможностью широкого изменения углов их установки. Поворот удлиненных редукторов 8 с меньшими толкающими винтами 6 и 7, преобразующих его полетную конфигурацию с гибридного шестивинтового электросамолета КВП в шести- или четырех- или двухвинтовой электросамолет дупланной схемы, осуществляется с помощью электромеханических приводов (на фиг. 1 и 2 не показаны). Выпуск и уборка колесного шасси 14 и 15, управление закрылками 9 и 10, элеронами 20, рулями высоты 18 и направления 19 осуществляется также электрически. Трехопорное убирающееся шасси, вспомогательная опора со спаренными мотор-колесами 15 убирается в заднюю нишу фюзеляжа 1, главные передние опоры с колесами 14 - в подкрыльные ниши мотогондол 11.
Управление полностью электрическим ГСКВП обеспечивается общим (изменяющим силу тяги) изменением шага меньших винтов 6-7 на четырех задних мотогондолах 5 и двух больших тянущих винтов 12-13 на двух передних мотогондолах 11, а также отклонением рулевых поверхностей по крену - элеронов 20, рулей высоты 18 и направления 19, работающих совместно с отклонением редукторов 8 (см. фиг. 1). При взлетно-посадочных режимах полета и выполнении КВП подъемная сила создается крыльями 2 и 4, наклонная/маршевая тяга - четырьмя толкающими винтами 6-7 / двумя большими тянущими винтами 12-13, на крейсерских режимах полета - крыльями 2 и 4, маршевая тяга - шести- или четырех- или двухвинтовой движительной системой соответственно тремя, двумя или одной парой соответствующих винтов 6-7, 12-13 (см. фиг. 2). После выполнения короткого взлета и при переходе с шестивинтовой движительной системы в четырех- или двухвинтовую движительную систему и если возникает момент тангажа (Mz), то он парируется отклонением рулей высоты 18, создающих, работая позади крыльев 2 и 4, парирующую силу. Затем после поворота редукторов 8 с меньшими винтами 6-7 в исходное положение с расположением осей их вращения вдоль линий маршевой их тяги обеспечивается возможность с горизонтальной тягой больших тянущих винтов 12-13 выполнения крейсерского горизонтального полета (см. фиг. 2). При выполнении технологии укороченного взлета с шестивинтовой движительной системой его поворотные редуктора 8 с меньшими винтами 6-7, установленные в промежуточное положение -15° для достижения совместно с маршевой тягой больших винтов 12-13 максимального ускорения при разбеге с одновременным автоматическим отклонением закрылок 3 и внутренних 9 и внешних 10 закрылок, увеличивающим подъемную силу первого 2 и второго 4 крыла соответственно, образуя взлетную его конфигурацию, и возможность автоматического ускоренного синхронного отклонения редукторов 8 с меньшими толкающими винтами 6-7 на угол с -15°до -60°, позволяющего достичь двух максимальных составляющих взлетной тяги: для ускоренного движения вперед и вертикального подъема.
Таким образом, только многодвигательная концепция разнесенного расположения ряда двигателей в двух трехдвигательных системах с распределенной тягой разновеликих винтов может обеспечить максимальную разгрузку, особенно, двух крыльев от действия аэродинамических и массовых сил, а самолеты дупланной схемы со вторым большим крылом, имеющим ромбовидные концевые шайбы, включающие верхние и нижние разновеликие крылышки соответственно обратной и прямой стреловидности отогнутые по дуге наружу, что они весьма эффективны в повышении несущей способности крыла и уменьшении индуктивного его сопротивления, то, следовательно, все они пригодны для дальнейших инженерных приложений. Легкий ГСКВП исполнения РТРВ-Х2+4, имеющий без особых массовых затрат и просто реализуемой формы ромбовидные концевые шайбы с верхними и нижними крылышками соответственно обратной и прямой стреловидности (совместно увеличивающими взлетный вес на 5,2%, скороподъемность и крейсерскую скорость до 10% и снижающими потребление топлива на 5,6%). Поэтому дальнейшие исследования по созданию таких ГСКВП, используя вышеназванные преимущества, позволит освоить широкое их семейство (см. табл. 1). В конечном итоге, широкие эксплуатационные требования к полностью электрическим самолетам нового поколения, несомненно приведут к созданию ГСКВП, особенно, на платформе имеющихся в наличии турбовинтовых самолетов, что позволит весьма сократить сроки их освоения и достойно конкурировать с компаниями "EADS" (ЕвроСоюз), "Bauhaus Luftfahrt" (Германия) и "Volva Volare" (США), осваивающими и производящими гибридные, электрические самолеты проектов "E-Thrast", "Ce-Liner" и гибридный электросамолет модели GT4 соответственно.
Наиболее актуальным в современных условиях для этих целей является освоение на базе самолета Бе-132МК в первую очередь полностью электрического ГСКВП с взлетным весом 10800 кг и для перевозки 26 человек с общей дальностью полета до 2560 км при выполнении технологии КВП. Весить пустой ГСКВП-2,6, изготовленный из углепластика, будет не более 7320 кг при весе аккумуляторов 2900 кг. В гибридной его СУ, включающей четыре электромотора с меньшими винтами диаметром 2,03 м и два ОЭМГ - с большими винтами диаметром 2,87 м и суммарной пиковой/номинальной их мощности 1930/1061 кВт, имеются генерирующие ТДД типа Е-8 фирмы DAI (Австрия), которые могут предоставить еще 588 кВт (800 л.с). При благоприятных погодных условиях литиево-полимерная батарея позволит ГСКВП-2,6 улететь на расстояние в 544 км при крейсерской скорости 640 км/ч. Однако при падении ее заряда до 25% от максимального значения включатся два ТДД и будут в полете, вращая ОЭМГ, работающие в режиме электрогенераторов, подпитывать аккумуляторы. Топливный его бак при выполнении КВП вмещает 680 кг топлива, что эквивалентно дополнительным 2016 км. Поэтому, выполняя КВП и имея запас топлива на время полета 0,5 ч, и даже с учетом работы генераторных ТДД топливная эффективность для ГСКВП-2,6 на общей дальности полета 2560 км весьма впечатляюща и составит 10,22 г/пасс·км. В случае выхода из строя двух ОЭМГ с ТДД заряда энергии в аккумуляторах достаточно для того, чтобы ГСКВП-2,6 на минимальной третьей скорости долетел до ближайшего аэропорта и совершил безопасную аварийную посадку.
Поскольку современные технологии позволяют обеспечить следующие величины удельной массы электрических устройств как для электропривода (электродвигатель с блоком управления) до 0,32 кг/кВт (при мощности более 250 кВт), так и для электрогенератора до 0,23 кг/кВт с внутренним источником мощности, например, ТДД с ОЭМГ при мощности более 300 кВт, то только параллельно-последовательные гибридные СУ могут обеспечить выполнение заданного времени полета не менее 3…4 часов и создание полномасштабного легкого ГСКВП. Однако, до создания как электрических мотогондол, так и гибридных с турбовинтовым двигателем (ТВД) и ОЭМГ (с суммарной взлетной мощностью N=10600 л.с.) для параллельно-последовательной гибридной технологии, не исключено на базе турбовинтовых самолетов моделей Ил-112 В, Ил-114 и криогенного Ту-136 освоение турбовинтового ГСКВП-8,0.
Важной особенностью применения параллельно-последовательной гибридной технологии силового привода и концепции РТРВ-Х2+4 в ГСКВП, обеспечивающей качественный рост потребительских свойств, является то, что она масштабируемая и позволяющая создать как коммерческие ГСКВП, так и беспилотные тяжелые ГСКВП-4,6 с взлетным весом 10800 кг, освоенные на платформе самолета модели Бе-32К.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОДВИГАТЕЛЬНЫЙ ЭЛЕКТРОСАМОЛЕТ КОРОТКОГО ВЗЛЕТА И ПОСАДКИ | 2014 |
|
RU2554043C1 |
| ГИБРИДНЫЙ ЭЛЕКТРОСАМОЛЕТ КОРОТКОГО ВЗЛЕТА И ПОСАДКИ | 2014 |
|
RU2558168C1 |
| САМОЛЕТ КОРОТКОГО ВЗЛЕТА И ПОСАДКИ С ГИБРИДНОЙ СИЛОВОЙ УСТАНОВКОЙ | 2013 |
|
RU2542805C1 |
| КРИОГЕННЫЙ ЭЛЕКТРИЧЕСКИЙ ВЕРТОЛЕТ-САМОЛЕТ | 2013 |
|
RU2529568C1 |
| БЕСПИЛОТНЫЙ ТЯЖЕЛЫЙ ЭЛЕКТРОКОНВЕРТОПЛАН | 2013 |
|
RU2532672C1 |
| МНОГОВИНТОВОЙ ПРЕОБРАЗУЕМЫЙ БЕСПИЛОТНЫЙ ВЕРТОЛЕТ | 2014 |
|
RU2550909C1 |
| МНОГОВИНТОВОЙ ГИБРИДНЫЙ ЭЛЕКТРОКОНВЕРТОПЛАН | 2014 |
|
RU2543120C1 |
| ЛЕГКИЙ КОНВЕРТИРУЕМЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ | 2015 |
|
RU2579235C1 |
| АВИАЦИОННЫЙ КОМПЛЕКС ВЕРТИКАЛЬНОГО ВЗЛЕТА | 2014 |
|
RU2582743C1 |
| МНОГОВИНТОВОЙ БЕСПИЛОТНЫЙ ЭЛЕКТРОКОНВЕРТОПЛАН | 2014 |
|
RU2547155C1 |
Изобретение относится к области авиации, в частности к конструкциям летательных аппаратов с гибридными силовыми установками. Гибридный самолет короткого взлета и посадки (ГСКВП) выполнен по дупланной схеме, содержит на крыльях электрические и гибридные мотогондолы соответственно с четырьмя передними винтами и двумя задними винтами, размещенными соответственно на цельноповоротных консолях и на концах поворотных редукторов, и имеет фюзеляж, хвостовое оперение, двигатели параллельно-последовательной гибридной силовой установки, передающие мощность на соответствующие поворотные винты. ГСКВП выполнен с главной турбовинтовой силовой установкой (СУ), разноуровневыми крыльями, первое из которых, низкорасположенное, смонтировано впереди второго высокорасположенного крыла и концепции разнесенного расположения на крыльях двух трехдвигательных систем с распределенной тягой разновеликих винтов по схеме 2+4. Четыре меньших винта при выполнении короткого разбега имеют промежуточное отклонение от горизонтального положения на угол -15° и ускоренное отклонение вниз с угла -15° на угол -60° при достижении скорости движения 85% и 95% от взлетной скорости и конечное положение при расположении оси их вращения параллельно средней линии закрылка второго крыла. Достигается увеличение весовой отдачи, дальности полета, транспортной и топливной эффективности. 3 з.п. ф-лы, 2 ил., 1 табл. 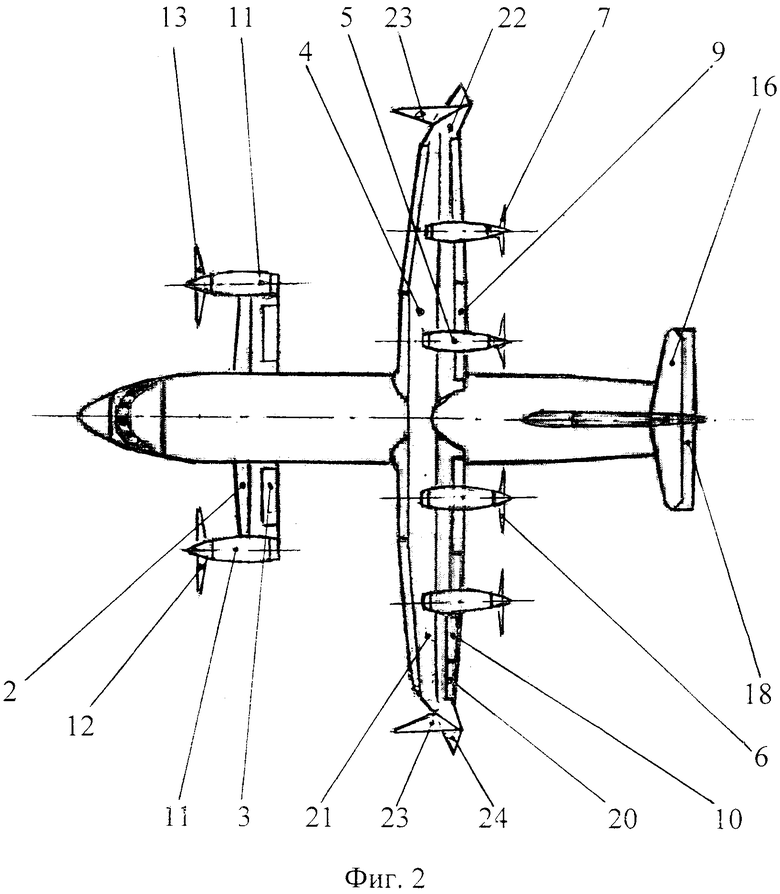
1. Гибридный самолет короткого взлета и посадки, выполненный по дупланной схеме, содержит на первом и втором крыльях подкрыльные мотогондолы с поворотными винтами, размещенными соответственно на цельно-поворотных консолях и на концах поворотных редукторов, и имеет фюзеляж, хвостовое оперение, двигатели параллельно-последовательной гибридной силовой установки, передающие мощность на соответствующие поворотные винты и трехопорное убирающееся колесное шасси, отличающийся тем, что он выполнен с главной турбовинтовой силовой установкой (СУ) и разноуровневыми крыльями, первое из которых смонтировано впереди второго высокорасположенного крыла и концепции разнесенного расположения на крыльях двух трехдвигательных систем с распределенной тягой разновеликих винтов по схеме 2+4, в четырехвинтовой из которой наряду двух внутренних и двух внешних надкрыльных мотогондол с меньшими винтами второго крыла, смонтированными посередине соответствующих закрылок последнего, снабжена двумя большими винтами, смонтированными на концах первого крыла в надкрыльных мотогондолах, имеющих главные боковые опоры переднего подкрыльного шасси, снабженного управляемой вспомогательной задней опорой со спаренными электрическими мотор-колесами, которые, обеспечивая аэродромное выруливание и его разгон при выполнении короткого разбега до скорости движения 25% от взлетной скорости, имеют электропитание от последовательной гибридной вспомогательной СУ, в которой отдельно размещенная турбина вырабатывает электричество и для каждого мотор-колеса, но и снабжен возможностью преобразования его с взлетно-посадочной конфигурации гибридного самолета с задними спаренными электрическими мотор-колесами и шестивинтовой движительной системой, включающей наряду с двумя большими винтами первого крыла, оснащенного по всему размаху закрылками, имеет на надкрыльных мотогондолах второго четыре меньших винта, создающих при выполнении короткого разбега промежуточное их отклонение от горизонтального положения на угол -15° и имеющих после ускоренного вниз отклонения с угла -15° на угол -60° соответственно при достижении скорости движения 85% и 95% от взлетной его скорости конечное положение при размещении оси их вращения параллельно средней линии закрылок второго крыла, и обеспечивающей при этом интенсивное обтекание верхней поверхности каждого крыла и бортов фюзеляжа воздушным потоком от меньшей и большей групп винтов, толкающие как четыре, так и два тянущих из которых соответственно имеют их вращение в направлении полета с набеганием по направлению от бортов как задней, так и передней частей фюзеляжа соответственно как нижних лопастей двух левых и двух правых меньших винтов, так и верхней лопасти левого и правого больших винтов, устраняющих гироскопический эффект и создающих более плавное обтекание крыльев и фюзеляжа с уменьшением сопротивления носовой и кормовой его частей за счет эффекта отсоса пограничного слоя перед этими винтами в полетную конфигурацию самолета с шести- или четырехвинтовой движительной системой, создающей маршевую тяговооруженность всеми или только меньшими винтами, обеспечивающую соответственно третью максимальную или вторую среднюю крейсерские скорости полета, но и обратно, при этом в каждом трехвинтовом модуле, винты которого разнесены в плане так, что по обе стороны от оси вращения большего винта равноудалены оси вращения двух меньших винтов, размещенных на консолях второго крыла с межосевым расстоянием между ними, определяемым из соотношения: Lмо=8/9·(D+d), м (где: Lм - межосевое расстояние, D и d - диаметры больших и меньших винтов соответственно), так и возможность достижения первой меньшей крейсерской скорости полета, обеспечиваемой максимальным отклонением закрылок двух крыльев и тягой двух только внутренних винтов меньшей группы, а два внешних из которой с двумя большими винтами устанавливаются во флюгерное положение, причем при выполнении КВП большие и меньшие винты обеспечивают возможность управления скоростью разбега и создания управляющих моментов, образуемых при максимальном изменении вектора тяги меньших винтов с автоматическим синхронным максимальным отклонением закрылок двух крыльев, при этом с целью снижения индуктивного сопротивления, повышения подъемной силы и эффективного удлинения трапециевидного второго крыла концевые его части от внешних надкрыльных мотогондол, выполненные с отрицательным углом -5° поперечного V, имеют в плоскости отрицательной их крутки ромбовидные в плане законцовки, каждая из которых имеет острый угол, вынесенный за заднюю кромку крыла, и большие по величине углы переменной и прямой стреловидности соответственно передней и задней ее кромок, чем у соответствующих кромок крыла, задняя из которых выполнена с обратной стреловидностью, но и на ее конце от вершины тупого ее угла скругленные при виде сзади соединения с ромбовидными при виде сбоку концевыми шайбами, имеющими верхние и нижние разновеликие отклоненные наружу плоские шайбы соответственно обратной и прямой стреловидности, отталкивающие поток воздуха вверх и назад, выходящий в вихревом обтекании второго крыла относительно его верхней большей плоской шайбы и снижающие относительно его законцовок интенсивность вихреобразования в потоке воздуха, перетекающего из под нижней к верхней поверхности крыла.
2. Гибридный самолет короткого взлета и посадки по п. 1, отличающийся тем, что второе крыло, выполненное с концевыми его частями от внешних мотогондол, смонтированными с положительным углом +5° поперечного V, размещено ниже первого крыла.
3. Гибридный самолет короткого взлета и посадки по п. 1 или 2, отличающийся тем, что главная дизель-электрическая СУ снабжена как парой левых и парой правых задних мотогондол с электромоторами, имеющими между собой и их парами одинаковые по пиковой мощности типоразмеры соответствующих меньших винтов второго крыла, так и смонтированными на первом крыле гибридными мотогондолами, в каждой из последних, выполненной с большим по взлетной мощности типоразмером, равным сумме пиковых мощностей четырех задних электрических мотогондол, и снабженной наряду с обратимым электромотором-генератором (ОЭМГ), оснащена турбодизельным двигателем (ТДД), причем каждая гибридная мотогондола, выполненная с передним последовательным расположением большего винта на выходном валу его редуктора, ОЭМГ и ТДД, последний из которых для отбора взлетной его мощности выполнен с передним выводом вала, и имеющая входную и выходную электромагнитные муфты сцепления на соответствующих валах ОЭМГ, обеспечивающие дистанционное управление их сцеплением/расцеплением соответственно с выходным валом ТДД и входным валом редуктора большего винта, позволяют реализовать в каждой из них как совместную работу ТДД с ОЭМГ, работающего в режиме электрогенератора, при передаче от внутреннего источника генерирующей номинальной мощности с ТДД на ОЭМГ во время крейсерской полетной конфигурации четырех- или двухвинтового электросамолета с максимальной или номинальной взлетной массой, так и самостоятельную работу ТДД и ОЭМГ, работающего в режиме электромотора, при поочередной передаче их номинальной мощности на больший винт в случае отказа электрической и механической части соответственно ОЭМГ и ТДД для выполнения посадочной полетной конфигурации четырех- или шестивинтового электросамолета с номинальной или максимальной взлетной массой.
4. Гибридный самолет короткого взлета и посадки по п. 3, отличающийся тем, что с целью обеспечения возможности выполнения технологии КВП при горизонтальной тяговооруженности, составляющей не менее 0,63 от номинальной взлетной его массы, создаваемой суммарной взлетной мощностью СУ с удельной ее нагрузкой ρN=3,15 кг/л.с., но и обеспечивающей как генерирующую номинальную мощность ТДД, располагающего не менее 18,68% от суммарной взлетной мощности СУ, так и три уровня номинальной электрической мощности, составляющей не менее 41,2%, 27,5% или 13,75% от суммарной взлетной мощности СУ и создающей маршевую тягу соответственно для третьей, второй или первой крейсерской скорости полета, при этом пиковая электрическая мощность системы электропривода, включающей наряду четырех электромоторов и двух ОЭМГ, имеет сумму пиковой мощности последних, равную не менее 50,0% от пиковой мощности четырех электромоторов.
| КРИОГЕННЫЙ ЭЛЕКТРИЧЕСКИЙ ВЕРТОЛЕТ-САМОЛЕТ | 2013 |
|
RU2529568C1 |
| WO 2012047327 A1, 12.04.2012 | |||
| БЕСПИЛОТНЫЙ ТЯЖЕЛЫЙ ЭЛЕКТРОКОНВЕРТОПЛАН | 2013 |
|
RU2532672C1 |
| US 20100072325 A1, 25.03.2010. | |||

