Изобретение относится к области авиационной техники и может быть использовано в конструкции беспилотных и гибридных электросамолетов продольной компоновки триплана с хвостовым оперением обратной Y-образности, смонтированным совместно с кормовым кольцевым каналом, имеющим внутри с задним расположением больший толкающий винт, вращающийся в противоположном направлении с тремя меньшими толкающими винтами, смонтированными по системе распределенной их тяги вокруг кольцевого канала на цельноповоротных внешнем вертикальном киле и внешних консолях стабилизатора, для выполнения короткого взлета и посадки.
Известен гибридный электросамолет фирмы "Volva Volare" (США) мод. GT4, выполненный из углепластика по аэродинамической схеме "утка" с задним расположением силовой установки, имеющей электромотор с толкающим винтом и генераторным турбодизельным двигателем, представляет собой моноплан со среднерасположенным крылом, имеющим двухкилевое оперение и на его концах концевые крылышки, систему управления и перезаряжаемые аккумуляторные батареи, трехстоечное убирающееся колесное шасси со вспомогательной передней опорой.
Признаки, совпадающие - наличие моноплана со среднерасположенным крылом и трехколесным шасси со вспомогательной передней опорой. Фюзеляж самолета изготовлен из углепластика, что обеспечивает ему несколько избыточную прочность как для коммерческого самолета, который не предназначен для высшего пилотажа. Аэродинамическая компоновка электросамолета, выполненная по схеме "утка", обеспечивает устойчивость при задней центровке - аккумулятор и двигатели силовой установки (СУ) находятся в кормовой части фюзеляжа. Перезаряжаемые литиево-ионные аккумуляторы электросамолета имеют время, необходимое для их зарядки, которое соответствует стандартному времени дозаправки. На консолях крыла смонтировано двухкилевое оперение. Крейсерский полет обеспечивает двухдвигательная СУ: электромотор, питаемый от аккумуляторов, вращает толкающий винт, а турбодизельный двигатель (ТДД) как внутренний источник генерирующей мощности подпитывает в крейсерском полете литиево-ионные аккумуляторные батареи.
Причины, препятствующие поставленной задаче: первая - это то, что электросамолет мод. GT4 с толкающим винтом на конце фюзеляжа, создающим только горизонтальную тягу как при взлетно-посадочных, так и крейсерских режимах полета, имеет сложную схему редуцирования и управления электромотором и ТДД при вращении одного толкающего винта от элетромотора, но и снижает стабильность управления и безопасность в случае отказа одного из двух двигателей. Вторая - это то, что перезаряжаемые литиево-ионные аккумуляторные батареи электросамолета, имеющие вес (порядка 35%) от пустого его веса, что весьма снижает полезную нагрузку и, как следствие, уменьшает весовую отдачу. Третья - это то, что литиево-ионная батарея позволит электросамолету улететь на расстояние в 540 км при крейсерской скорости 296 км/ч, а при падении ее зарядки до 25% от максимального значения включится внутренний источник генерирующей мощности - ТДД и будет в полете подпитывать аккумулятор. Топливный бак самолета может вместить 86,2 литра топлива, что эквивалентно дополнительным 1310 км при общей дальности полета до 1850 км. Все это ограничивает возможность дальнейшего увеличения взлетного веса и веса перезаряжаемых аккумуляторов, но и повышения горизонтальной тяговооруженности и обеспечения возможности выполнения технологии короткого взлета и посадки (КВП).
Известен электросамолет проекта "Ce-Liner" компании "Bauhaus Luftfahrt" (Германия), представляющий собой моноплан с низкорасположенным необычной формы крылом, имеющим с концевыми крылышками внешние части крыла C-образной формы, концы последних отклонены к мотогондолам, смонтированным по бокам фюзеляжа на горизонтальных пилонах и имеющим электромоторы с закрытыми тянущими винтовентиляторами, содержит в фюзеляже из углепластика систему управления и заменяемые аккумуляторные батареи, однокилевое хвостовое оперение и трехстоечное убирающееся колесное шасси с носовой вспомогательной и главными опорами.
Признаки, совпадающие - наличие задних мотогондол с тянущими винтовентиляторами. создающими только горизонтальную тягу, содержит систему управления, равномерно распределяющую зарядку аккумуляторов электросамолета "Ce-Liner" между двумя электромоторами с тянущими винтами, обеспечивающими скорость до 750 км/ч на высоте полета более 8500 м и при дальности полета до 1700 км, однокилевое хвостовое оперение и трехстоечное убирающееся колесное шасси с носовой вспомогательной опорой. Минимальное время подзарядки батарей будет два часа, поэтому для быстрого оборота операций батарей будет осуществляться их обмен. В этом случае 16 стандартных контейнеров LD3 с литиево-ионными аккумуляторными батареями могут быть заменены в течение 30-минутного времени обработки данных.
Причины, препятствующие поставленной задаче: первая - это то, что заднее размещение на конце и по бокам фюзеляжа с однокилевым хвостовым оперением двух мотогондол с электромоторами и закрытыми тянущими винтовентиляторами предопределяет конструктивно сложное крыло необычной формы, выполненное в поперечной плоскости С-образной конфигурации со сложной механизацией и рулевыми поверхностями крыла - элевонами, что усложняет конструкцию и продольную управляемость. Вторая - это то, что диаметры тянущих винтовентиляторов ограничены размером закапотированных кольцевых обтекателей и, как следствие, ограничивает горизонтальную тяговооруженность. Третья - это то, что заменяемые литиево-ионыые аккумуляторы электросамолета Ce-Liner с пассажировместимостыо 190 человек, который будет на 30 тонн тяжелее Airbus А320, это значительно снижает полезную нагрузку и, следовательно, уменьшает весовую отдачу. Четвертая - это то, что взлетная тяга тянущих винтовентиляторов обеспечивается только в горизонтальном направлении, а отсутствие возможности изменения в вертикальной плоскости направления вектора тяги этих винтовентиляторов и, как следствие, возможного уменьшения посадочной скорости, обеспечиваемой при выполнении технологии КВП, этот электросамолет Ce-Liner не может, что значительно уменьшает безопасность и, в частности, создает сложность продольного и поперечного управления с крылом С-образной формы, особенно на взлетно-посадочных режимах полета, когда у такого крыла вектор его тяги не уравновешивается. Все это ограничивает возможность дальнейшего увеличения взлетного веса и веса заменяемых аккумуляторных батарей, а также повышения горизонтальной тяговооруженности и выполнения технологии КВП.
Наиболее близким к предлагаемому изобретению является коммерческий электросамолет проекта "ZEHST" компании "EADS". Выполненный из углепластика фюзеляж содержит моноплан с низкорасположенным крылом и концевыми крылышками, силовую установку, включающую два сверхпроводящих электромотора, смонтированных на конце фюзеляжа и приводящих спаренные толкающие винты, вращающиеся в противоположных направлениях и смонтированные в кольцевом канале, имеющем двухкилевое V-образное оперение, систему управления и перезаряжаемые аккумуляторные батареи, трехстоечное убирающееся колесное шасси со вспомогательной передней опорой.
Признаки, совпадающие - наличие моноплана с низкорасположенным крылом и трехколесным шасси со вспомогательной передней опорой. Материалом для корпуса электросамолета проекта "ZEHST" служит углеродное волокно, благодаря чему он будет достаточно легким. Основными его преимуществами, которые будут выгодно отличать его от обычных самолетов, являются мощная аэродинамика, композитный дизайн и, конечно же, малый вес планера. Модифицированные литиево-ионные полимерные аккумуляторы электросамолета будут перезаряжаемыми. А время, необходимое для их зарядки, будет соответствовать стандартному времени дозаправки. На конце фюзеляжа совместно с кольцевым каналом смонтировано двухкилевое V-образное хвостовое оперение. Крейсерский полет обеспечивают два электромотора со спаренными толкающими винтами, вращающимися в противоположных направлениях.
Причины, препятствующие поставленной задаче: первая - это то, что электросамолет проекта "ZEHST" со спаренными толкающими винтами в кольцевом канале на конце фюзеляжа, создающими только горизонтальную тягу как при взлетно-посадочных, так и крейсерских режимах полета, имеет сложную схему редуцирования и управления электромоторами при независимом вращении двух соосных толкающих винтов, что предопределяет возможность эксплуатации с бетонных взлетно-посадочных площадок длиной 1350 м, а также снижает стабильность управления и безопасность в случае отказа одного из электромоторов. Вторая - это то, что перезаряжаемые литиево-ионные аккумуляторные батареи электросамолета, имеющие вес (порядка 35-40%) от пустого его веса, что весьма снижает полезную нагрузку и, как следствие, уменьшает весовую отдачу. Третья - это то, что при времени полета два часа дальность действия может составить до 1500 км при высоте его полета свыше 8500 м. Следующим недостатком является также неразвитое V-образное хвостовое оперение, отсюда плохая и путевая устойчивость и особенно при отказе одного из электромоторов на взлетно-посадочных режимах и при недостатке горизонтальной тяги, обеспечиваемой спаренными винтами, имеющими равновеликие диаметры, ограниченные диаметром кольцевого канала, имеющего внешний диаметр чуть больше внешнего диаметра фюзеляжа. Кроме того, спаренные толкающие винты, смонтированные внутри кормового кольцевого канала, передний в направлении полета из которых имеет ограниченные возможности бокового подсоса воздушного потока и его направления на последующий толкающий винт, весьма снижает общий КПД винтомоторной группы, а вредное взаимовлияние спаренных винтов весьма снижает общую их тягу по сравнению с тягой таких же винтов, сгруппированных по системе распределенной тяги. Все это ограничивает возможность дальнейшего увеличения взлетного веса и весовой отдачи и, как следствие, веса перезаряжаемых аккумуляторов, а также ограничения как повышения горизонтальной тяговооруженности спаренных винтов до 15% по сравнению с одним толкающим винтом, имеющим сопоставимые наружные диаметры и условия по прилагаемой к ним взлетной мощности, так и возможности обеспечения выполнения технологии короткого взлета и посадки (КВП).
Предлагаемым изобретением решается задача в указанном выше коммерческом электросамолете проекта "ZEHST" значительного увеличения взлетной горизонтальной тяговооруженности и повышения взлетного веса и весовой отдачи, упрощения конструкции схемы редуцирования и управления электромоторами при независимом вращении спаренных винтов, уменьшения массы планера за счет исключения управления креном отклонением элеронов крыла и улучшения поперечной и курсовой устойчивости, а также упрощения управляемости по крену и тангажу.
Отличительными признаками предлагаемого изобретения от указанного выше известного коммерческого электросамолета проекта "ZEHST", наиболее близкого к нему, являются наличие того, что он выполнен по продольной схеме триплана с хвостовым оперением обратной Y-образности, смонтированным совместно с кормовым кольцевым каналом, имеющим внутри вдоль оси симметрии гибридную мотогондолу с задним расположением силовой установки, и большим толкающим винтом, вращающимся в противоположном направлении с тремя меньшими толкающими винтами, имеющими одинаковое направление вращения между собой, установленными по системе распределенной их тяги и концепции группового их расположения вокруг кольцевого канала в соответствующих каплевидной формы мотогондолах с задним расположением электродвигателя, смонтированных на цельноповоротных внешнем вертикальном киле и внешних консолях стабилизатора, имеющих отрицательный угол поперечного V=22,5°, внутренние секции которых выполнены в виде грех основных ребер жесткости кольцевого канала, оснащенного нижним вертикальным ребром жесткости, и снабжен возможностью изменения в полетной его конфигурации с гибридного электросамолета с четырьмя разновеликими флюгерно-реверсивными винтами для взлетно-посадочных режимов полета в электросамолет с одно- или трехвинтовой движительной системой соответственно с первой или второй крейсерской скоростью полета, но и обратно, при этом диаметры большего и меньших винтов определяются из соотношения: 
Кроме того, с целью увеличения аэродинамического качества, снижения индуктивного сопротивления, значительного повышения коэффициента подъемной силы крыла и несущей его способности он снабжен крылом C-образной формы, каждое верхнее большого удлинения стреловидное его внутреннее крылышко оснащено с положительным поперечным V относительно последнего внешним стреловидным крылышком малого удлинения, образующим как в плане переменную стреловидность и по передней, и по задней кромке с соответствующими кромками крыла, размещено со своей задней кромкой в плане таким образом, что находится при этом на одной линии с задней кромкой стреловидного крыла, так и в поперечной плоскости - трехэлементную T-образность с разновеликими верхними полками, меньшая из которых, отогнутая вверх и назад, образуя по передней и задней кромкам переменные стреловидности в плане, отталкивает поток воздуха вверх и назад, выходящий в вихревом обтекании из-под нижней поверхности крыла относительно ее внешнего крылышка.
Благодаря наличию этих признаков, позволяющих выполнить гибридный электрический самолет КВП по продольной компоновке триплана и концепции кругового расположения разновеликих винтов (КРРВ) по схеме 1+3, что создает возможность сравнительно дешево удвоить горизонтальную тяговооруженность и обеспечить преобразование его полетной конфигурации как с самолета с четырьмя разновеликими флюгерно-реверсивными винтами для взлетно-посадочных режимов полета, так и в самолет с трех- или одновинтовой движительной системой для крейсерского полета, но и обратно. Поскольку аэродинамическая продольная схема триплана, включающая ПГО и стреловидное крыло, имеет хвостовое оперение обратной Y-образности, смонтированное совместно с кормовым кольцевым каналом, имеющим внутри с задним расположением больший толкающий винт, вращающийся в противоположном направлении с тремя меньшими толкающими винтами, смонтированными снаружи на цельноповоротных внешнем вертикальном киле и внешних консолях стабилизатора. При этом мотогондола с верхним меньшим винтом, смонтированная на цельноповоротном внешнем вертикальном киле (ЦВВК), вынесена за заднюю кромку последнего таким образом, что обеспечивает свободный его поворот в горизонтальной плоскости и влево, и вправо на угол ±15° относительно вертикальной оси киля, а левая и правая мотогондолы с меньшими винтами, смонтированными на цельноповоротных внешних консолях стабилизатора (ЦВКС), вынесены за заднюю кромку последнего так, что обеспечивают свободное их вращение и снабжены с возможностью расширенного диапазона соответственно их дифференциального и синфазного поворота в вертикальной плоскости относительно поперечной оси стабилизатора совместно с левым и правым меньшими винтами от горизонтального положения вниз и вверх соответственно с 0° до -35° и с 0° до +15°. В гибридной СУ во время крейсерского полета увеличение генерирующей мощности для электропитания, когда падение зарядки литиево-ионной полимерной аккумуляторной батареи снизится до 25% от ее максимума система управления автоматически отключит выходной муфтой сцепления тянущий больший винт от его редуктора, установит его лопасти во флюгерное положение и включит газотурбинный двигатель (ГТД) кормовой гибридной мотогондолы, который будет вращать через задний редуктор электромотор-генератор, обеспечивающий подзарядку аккумуляторов в полетной конфигурации трехвинтового самолета. Гибридная СУ, выполненная по параллельно-последовательной технологии силового привода, снабжена верхним, левым и правым электродвигателями, смонтированными в мотогондолах на соответствующих цельноповоротных внешних поверхностях хвостового оперения обратной Y-образности и имеет систему электропривода, включающую все электродвигатели, аккумуляторные перезаряжаемые батареи, преобразователь энергии с блоком управления силовой передачи, подключающим и отключающим электродвигатели и ГТД, переключающим генерирующую мощность и порядок как подзарядки аккумуляторов от электромотора-генератора, так и совместной работы ГТД с последним, имеющим режим электромотора, или самостоятельной его работы только на один вал большего винта. Наличие этих признаков позволит весьма снизить акустическую сигнатуру гибридной СУ и обеспечить поперечную и продольную управляемость соответственно дифференциальным и синфазным поворотом ЦВКС совместно с меньшими винтами, а размещение гибридной мотогондолы в кормовой части фюзеляжа обеспечит упрощение системы управления электроприводами, но и позволит за счет выноса винтов к хвосту электросамолета достичь низкого уровня шума в салоне. Это также позволит повысить безопасность полетов и использовать ГТД меньших габаритов в его поперечнике, что обеспечит уменьшение миделя кормовой гибридной мотогондолы и ширины заднего обтекателя с выхлопным патрубком. Все это позволит весьма уменьшить вес планера, увеличить полезную нагрузку, повысить весовую отдачу, а также улучшить транспортную и топливную эффективность.
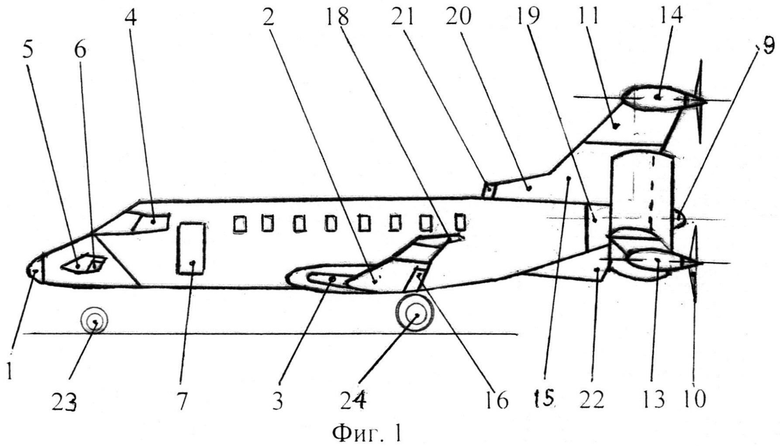
Предлагаемое изобретение гибридного электросамолета короткого взлета и посадки (ЭСКВП) и варианты его использования представлены на фиг.1 и 2.
На фиг.1 на общем виде сбоку изображен ЭСКВП с ПГО, стреловидным крылом и хвостовым оперением обратной Y-образности, ЦВКС которого имеют меньшие винты, отклоненные вниз па угол -35° в полетной конфигурации самолета с четырехвинтовой движительной системой на взлетно-посадочных режимах КВП.
На фиг.2 на общем виде спереди изображен ЭСКВП с ПГО, низкорасположенным С-образным крылом, имеющим отогнутую вверх и назад внешнее крылышко, и хвостовым оперением обратной Y-образности, ЦВВК и ЦВКС которого имеют меньшие винты, создающие горизонтальную тягу в полетной конфигурации самолета с трехвинтовой движительной системой на крейсерских режимах полета с установленным в кольцевом канале большим винтом во флюгерное положение.
Гибридный электрический самолет КВП и исполнения КРРВ-Х1+3, выполненный по продольной компоновке триплана и представленный на фиг.1 и 2, содержит фюзеляж 1 и низкорасположенное крыло 2, имеющее впереди его наплывы 3 с переменной стреловидностью, плавно переходящие во внешние части крыла 2, объединяющие фюзеляж 1 и крыло 2 с наплывами 3 в единую плавно образованную конструкцию (см. фиг.1). Перед крылом 2 в носовой части фюзеляжа 1, имеющее с большим панорамным остеклением кабину 4 экипажа, смонтировано ПГО 5, имеющее по всему размаху закрылки 6. Далее по левому борту фюзеляжа 1 имеется встроенная дверь-трап 7. В задней части фюзеляжа 2 имеется хвостовое оперение обратной Y-образности, смонтированное совместно с кормовым кольцевым каналом 8, имеющим внутри с задним расположением больший толкающий винт 9, вращающийся в противоположном направлении с тремя меньшими, имеющими одинаковое направление вращения между собой винтами 10, смонтированными снаружи на ЦВВК 11 и ЦВКС 12, выполненными соответственно в виде цельноповоротных рулей направления и высоты. В Y-образном хвостовом оперении отклоненные вниз с отрицательным поперечным V стабилизаторы снабжены на ЦВКС 12 левой и правой мотогондолами 13 с меньшими винтами 10, имеющими диапазон их поворота от -35° до +15°, а верхняя мотогондола 14 с меньшим винтом 10, смонтированная на ЦВВК 11, вынесена за заднюю кромку последнего таким образом, что обеспечивает свободный его поворот в горизонтальной плоскости и влево, и вправо на угол ±15° относительно вертикальной оси киля 15. Низкорасположенное крыло 2, оснащенное внутренними и внешними закрылками 16, имеет со стреловидной концевой его частью в поперечной плоскости C-образную форму крыла. При этом на крыле 2 C-образной формы каждое верхнее большого удлинения стреловидное его внутреннее крылышко 17 оснащено с положительным поперечным V относительно последнего внешним стреловидным крылышком 18 малого удлинения, образующим как в плане переменную стреловидность и по передней, и по задней кромке с соответствующими кромками крыла 2, размещено со своей задней кромкой в плане таким образом, что находится при этом на одной линии с задней кромкой концевой секции крыла 2, так и в поперечной плоскости - трехэлементную Т-образность с разновеликими верхними полками, меньшая 18 из которых, отогнутая вверх и назад, образуя по передней и задней кромкам переменные стреловидности в плане, отталкивает поток воздуха вверх и назад, выходящий в вихревом обтекании из-под нижней поверхности крыла 2 относительно ее внешнего стреловидного крылышка 18.
Гибридная СУ, выполненная по параллельно-последовательной технологии силового привода, снабжена верхней, левой и правой мотогондолами 13 с электродвигателями, смонтированными вокруг кольцевого канала 8, вращательно связанными с соответствующими толкающими меньшими винтами 10 и кормовой мотогондолой 19 толкающего большего винта 9, в которой наряду с ГТД, имеющим в передней кромке небольшого форкиля 20 его воздухозаборник 21 и с задним расположением вал с его задним редуктором для отбора взлетной его мощности, снабжена обратимым электромотором-генератором (ОЭМГ), вращательно связанными через входную и выходную муфты сцепления соответственно с задним редуктором и большим винтом 9 (на фиг.1 и 2 не показаны). Система электропривода включает все электродвигатели, аккумуляторные перезаряжаемые батареи, преобразователь энергии с блоком управления силовой передачи, подключающим и отключающим электродвигатели и ГТД, переключающим генерирующую мощность и порядок подзарядки аккумуляторов от электрогенератора (на фиг.1 и 2 не показаны). Верхний и левый с правым четырехлопастные меньшие винты 10 на трех поворотных мотогондолах 14 и 13, но и один четырехлопастной больший винт 9 в кольцевом канале 8 выполнены флюгерно-реверсивными и с жестким креплением лопастей и возможностью изменения углов их установки. Поворот ЦВВК 11 и ЦВКС 12 совместно с мотогондолами 14 и 13 и меньшими винтами 10 осуществляется с помощью электромеханических приводов, а выпуск и уборка колесного шасси, управление закрылками 6 и 16, отклонением и складыванием внешних частей крыла 2 осуществляется также электрически. Задний подфюзеляжный гребень 22, повышая путевую устойчивость, выполняет функцию ограничителя нижних винтов 10, в случае заброса по углу наклона фюзеляжа 1 на взлетно-посадочных режимах. Трехопорное убирающееся колесное шасси - с носовой управляемой стойкой, которая с колесом 23 убирается в переднюю нишу фюзеляжа 1. В кессоне крыла 2 размещены ниши для уборки основных стоек шасси с колесами 24.
Управление гибридным ЭСКВП обеспечивается общим (изменяющим силу тяги) изменением шага меньших винтов 10 на трех мотогондолах 13 и 14 и одного большего винта 9 в кормовом кольцевом канале 8, а также отклонением рулевых поверхностей - ЦВВК 11 и ЦВКС 12 соответственно рулей направления и высоты, работающих совместно с меньшими винтами 10. При взлетно-посадочных режимах полета подъемная сила создается крылом 2 и ПГО 5, горизонтальная тяга - четырехвинтовой движительной системой - тремя меньшими винтами 10 совместно с большим винтом 9, на крейсерских режимах полета - крылом 2 и ПГО 5, горизонтальная тяга - трех- или одновинтовой движительной системой соответственно тремя меньшими винтами 10 или одним большим винтом 9. На взлетно-посадочных режимах полета ЭСКВП при создании горизонтальной тяги его толкающие меньшие винты 10, имеющие одинаковое направление вращения между собой и противоположное с тянущим большим винтом 9 и расположенные в хвостовой части, обеспечивают, не создавая дополнительные вихревые потоки, более плавное обтекание крыла 2 и фюзеляжа 1, но и весьма повышающие эффективность четырехвинтовой движительной системы. При переходе с четырехвинтовой движительной системы в трех- или одновинтовую движительную систему и если возникает момент тангажа (MZ), то он парируется отклонением ЦВКС 12, создающих, работая позади крыла 2, парирующую силу. После установки левой и правой ЦВКС 12 с мотогондолами 13 и меньшими винтами 10 в горизонтальное положение вдоль линий горизонтальной их тяги осуществляется возможность крейсерского полета. При выполнении технологии укороченного взлета с четырехвинтовой движительной системой его ЦВКС 12, установленные в промежуточное положение -15° для достижения совместно с горизонтальной тягой верхнего меньшего винта 10 и большего винта 9 максимального ускорения при разбеге с одновременным автоматическим отклонением закрылок 6 и 16 на максимальные углы для достижения максимальной подъемной силы ПГО 5 и крыла 2, снабжены возможностью расширенного и автоматического ускоренного синфазного отклонения совместно с мотогондолами 13 и меньшими винтами 10 вниз на угол с -15° до -35° для достижения двух составляющих тяги при движении вперед и вертикальном подъеме.
Таким образом, ЭСКВП, имеющий ПГО, C-образной формы крыло с концевыми крылышками и хвостовое оперение обратной Y-образности, смонтированное совместно с кормовым кольцевым каналом, имеющим внутри с задним расположением больший толкающий винт, вращающийся в противоположном направлении с тремя меньшими толкающими винтами, смонтированными по системе распределенной их тяги вокруг кольцевого канала на цельноповоротных внешнем вертикальном киле и внешних консолях стабилизатора, представляет собой гибридный самолет продольной схемы триплана с ГТД и ОЭМГ. Четырехлопастные флюгерно-реверсивные толкающие винты на левой и правой поворотных мотогондолах, создающие горизонтальную и соответствующим отклонением вниз наклонную тягу, обеспечивают необходимые управляющие моменты и уменьшение дистанции при выполнении технологии КВП. Причем ПГО находится спереди крыла и создает дополнительную подъемную силу и разгружает его, что и предопределяет наравне с высокой тяговооруженностью гибридной СУ возможность легко реализовать и выполнение технологии КВП. Последнее, весьма важно при палубном базировании и особенно гибридного ЭСКВП, так как обеспечивает короткий его взлет и посадку на палубу корабля (достаточно и 165-200 м) при взлетной тяговооруженности не менее 0,63.
В настоящее время известно, что концепция кругового расположения разновеликих винтов по схеме 1+3 вокруг кормового кольцевого канала и особенно в самолетах продольной компоновки триплана обеспечивает максимальную разгрузку крыла и от действия аэродинамических и массовых сил, а самолеты с C-образным крылом, имеющим концевые крылышки, отогнутые назад и вверх, что они весьма эффективны в повышении несущей способности крыла, то, следовательно, все они пригодны для дальнейших инженерных приложений. Поэтому дальнейшие исследования по созданию гибридных ЭСКВП, используя вышеназванные преимущества, позволит освоить широкое их семейство (см. табл.1). В конечном итоге, широкие эксплуатационные требования к гибридным самолетам нового поколения, несомненно, приведут к созданию и освоению гибридных ЭСКВП, особенно с генераторными ТДД типа E-8 и E-12 фирмы DAI (Австрия), обеспечивающих реально высокие технико-экономические результаты, позволяющие достойно конкурировать с компаниями "Volva Volare" (США) и "Bauhaus Luftfahrt" (Германия), производящей и осваивающей гибридный электросамолет модели GT4 и электросамолет проекта Ce-Einer соответственно.
Наиболее актуальным в современных условиях для этих целей является освоение на платформе самолета М-105 "Дуэт" в первую очередь коммерческого ЭСКВП с взлетным весом 7200 кг и для перевозки 19 человек с общей дальностью полета до 2010 км при выполнении технологии КВП. При этом весить пустой ЭСКВП, изготовленный из углепластика, будет не более 4730 кг при весе аккумуляторов 1740 кг. В гибридной его СУ, включающей три электродвигателя с меньшими винтами диаметром 2,0 м и один ОЭМГ с большим винтом диаметром 2,88 м суммарной пиковой/номинальной мощности 1128/620 кВт, имеется генераторный ТДД (Е-12), который при необходимости может предоставить еще 551 кВт (750 л.с). При благоприятных погодных условиях литиево-полимерная батарея позволит ЭСКВП-1,9 улететь на расстояние в 510 км при крейсерской скорости 600 км/ч. Однако при падении зарядки до 25% от максимального значения включится ТДД и будет в полете, вращая ОЭМГ, работающий в режиме электрогенератора, подпитывать аккумуляторы. Топливный его бак при выполнении КВП вмещает 360 кг топлива, что эквивалентно дополнительным 1500 км. Поэтому, выполняя КВП и имея запас топлива на время полета 0,5 ч, и даже с учетом работы генераторного ТДД топливная эффективность для ЭСКВП-1,9 на общей дальности полета до 2010 км весьма впечатляюща и составит 9,43 г/пасс·км. В случае выхода из строя электрического генератора или ТДД заряда энергии в аккумуляторных батареях достаточно для того, чтобы ЭСКВП на минимальной скорости долетел до ближайшего аэропорта и совершил безопасную аварийную посадку.
Важной особенностью применения параллельно-последовательной гибридной технологии силового привода и концепции КРРВ-Х1+3 в ЭСКВП, обеспечивающей качественный рост потребительских свойств, является то, что она масштабируемая и позволяющая наряду с коммерческим ЭСКВП-1,9 создать также и легкие ЭСКВП-0,9 с пассажировместимостью 9 человек, и беспилотные ЭСКВП-1,1 с взлетным весом 4 тонны, освоенные на платформе, например, самолета модели М-101 "Гжель".
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИБРИДНЫЙ САМОЛЕТ КОРОТКОГО ВЗЛЕТА И ПОСАДКИ | 2015 |
|
RU2577931C1 |
| ГИБРИДНЫЙ ЭЛЕКТРОСАМОЛЕТ КОРОТКОГО ВЗЛЕТА И ПОСАДКИ | 2014 |
|
RU2558168C1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЭЛЕКТРОСАМОЛЕТ КОРОТКОГО ВЗЛЕТА И ПОСАДКИ | 2014 |
|
RU2554043C1 |
| КРИОГЕННЫЙ ТУРБОЭЛЕКТРИЧЕСКИЙ САМОЛЕТ КОРОТКОГО ВЗЛЕТА И ПОСАДКИ | 2013 |
|
RU2534676C1 |
| МНОГОВИНТОВОЙ КОНВЕРТИРУЕМЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ | 2014 |
|
RU2568517C1 |
| БЕСПИЛОТНЫЙ ВЕРТОЛЕТ-САМОЛЕТ С ГИБРИДНОЙ СИЛОВОЙ УСТАНОВКОЙ (ВАРИАНТЫ) | 2013 |
|
RU2527248C1 |
| ЛЕГКИЙ КОНВЕРТИРУЕМЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ | 2015 |
|
RU2579235C1 |
| БЕСПИЛОТНЫЙ ТЯЖЕЛЫЙ ЭЛЕКТРОКОНВЕРТОПЛАН | 2013 |
|
RU2532672C1 |
| МНОГОВИНТОВОЙ ПРЕОБРАЗУЕМЫЙ БЕСПИЛОТНЫЙ ВЕРТОЛЕТ | 2014 |
|
RU2550909C1 |
| КРИОГЕННЫЙ ЭЛЕКТРИЧЕСКИЙ ВЕРТОЛЕТ-САМОЛЕТ | 2013 |
|
RU2529568C1 |
Изобретение относится к области авиации, в частности к конструкциям беспилотных летательных аппаратов. Самолет короткого взлета и посадки выполнен по продольной схеме триплана с хвостовым оперением обратной Y-образности, смонтированным совместно с кормовым кольцевым каналом, имеющим внутри гибридную мотогондолу с задним расположением силовой установки и большим толкающим винтом, вращающимся в противоположном направлении с тремя меньшими толкающими винтами, имеющими одинаковое направление вращения между собой, установленными вокруг кольцевого канала в соответствующих мотогондолах с задним расположением электродвигателя. Мотогондолы смонтированы на цельноповоротных вертикальном киле и консолях стабилизатора, имеющих отрицательный угол поперечного V=22,5°. Для выполнения укороченного взлета консоли цельноповоротного стабилизатора устанавливаются в промежуточное положение -15° с одновременным автоматическим отклонением закрылков на максимальные углы, снабжены возможностью синхронного и автоматического ускоренного синфазного отклонения совместно с меньшими винтами вниз на угол с -15° до -35°. Силовая установка включает внешние и гибридную мотогондолы с соответствующими винтами. Достигается улучшение поперечной и курсовой устойчивости, упрощение управляемости по крену и тангажу. 1 з.п. ф-лы, 2 ил.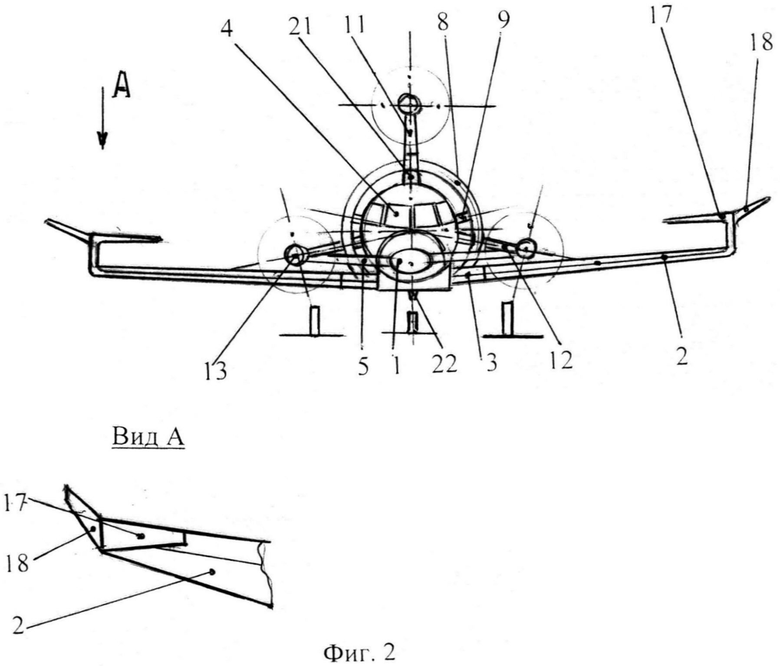
1. Самолет короткого взлета и посадки с гибридной силовой установкой, имеющий планер из углепластика, содержит низкорасположенное крыло с концевыми крылышками, силовую установку, включающую два сверхпроводящих электромотора, смонтированных на конце фюзеляжа и приводящих спаренные толкающие винты, вращающиеся в противоположных направлениях и смонтированные в кольцевом канале, имеющий хвостовое оперение, систему управления и перезаряжаемые аккумуляторные батареи, трехстоечное убирающееся колесное шасси со вспомогательной передней опорой, отличающийся тем, что он выполнен по продольной схеме триплана с хвостовым оперением обратной Y-образности, смонтированным совместно с кормовым кольцевым каналом, имеющим внутри вдоль оси симметрии гибридную мотогондолу с задним расположением силовой установки и большим толкающим винтом, вращающимся в противоположном направлении с тремя меньшими толкающими винтами, имеющими одинаковое направление вращения между собой, установленными по системе распределенной их тяги и концепции группового их расположения вокруг кольцевого канала в соответствующих каплевидной формы мотогондолах с задним расположением электродвигателя, смонтированных на цельноповоротных внешнем вертикальном киле и внешних консолях стабилизатора, имеющих отрицательный угол поперечного V=22,5°, внутренние секции которых выполнены в виде трех основных ребер жесткости кольцевого канала, оснащенного нижним вертикальным ребром жесткости, и снабжен возможностью изменения в полетной его конфигурации с гибридного электросамолета с четырьмя разновеликими флюгерно-реверсивными винтами для взлетно-посадочных режимов полета в электросамолет с одно- или трехвинтовой движительной системой соответственно с первой или второй крейсерской скоростью полета, но и обратно, при этом диаметры большего и меньших винтов определяются из соотношения: (где D и d - диаметры большего и трех меньших поворотных винтов соответственно), причем с целью как предотвращения момента рыскания при больших углах атаки и обеспечения управления по курсу мотогондола с верхним меньшим винтом, смонтированная на цельноповоротном внешнем вертикальном киле, вынесена за заднюю кромку последнего таким образом, что обеспечивает свободный его поворот в горизонтальной плоскости и влево, и вправо на угол ±15° относительно вертикальной оси киля, так и улучшения взлетно-посадочных характеристик и повышения при этом поперечной устойчивости, но и обеспечения поперечного и продольного управления балансировкой левая и правая мотогондолы с меньшими винтами, смонтированными на цельноповоротных внешних консолях стабилизатора, вынесены за заднюю кромку последнего таким образом, что обеспечивают свободное их вращение и снабжены возможностью расширенного диапазона соответственно их дифференциального и синфазного поворота в вертикальной плоскости относительно поперечной оси стабилизатора совместно с соответствующими меньшими винтами от горизонтального положения вниз и вверх соответственно с 0° до -35° и с 0°до +15°, причем с целью обеспечения выполнения технологии укороченного его взлета с четырехвинтовой движительной системой консоли цельноповоротного стабилизатора, установленные в промежуточное положение -15°, позволяющие совместно с горизонтальной тягой большего винта и верхнего меньшего винта достичь максимального ускорения при разбеге с одновременным автоматическим отклонением закрылок на максимальные углы, создающие максимальную подъемную силу переднего горизонтального оперения и крыла, снабжены возможностью синхронного и автоматического ускоренного синфазного отклонения совместно с левым и правым меньшими винтами вниз на угол с -15° до -35°, позволяющего достичь двух составляющих взлетной тяги: для движения вперед и одновременного вертикального подъема, силовая установка, выполненная по параллельно-последовательной гибридной технологии силового привода, включает внешние и гибридную мотогондолы с соответствующими винтами, первые три из которых, имея равные как между собой, так и их совместную горизонтальные тяги меньших винтов в сравнении с тягой большего винта, снабжены верхним, левым и правым электродвигателями, выполненными с возможностью их работы при различных углах отклонения в соответствующих плоскостях и вращательно связанными с соответствующими меньшими винтами, а гибридная мотогондола большего винта, в которой наряду с газотурбинным двигателем, имеющим в передней кромке форкиля его воздухозаборник и с задним расположением вал с его задним редуктором для отбора взлетной его мощности, снабжена обратимым электромотором-генератором, вращательно связанными через входную и выходную муфты сцепления соответственно с задним редуктором и большим винтом, и имеющая систему электропривода, включающую все электродвигатели, аккумуляторные перезаряжаемые батареи, преобразователь энергии с блоком управления силовой передачи, подключающим и отключающим электродвигатели и газотурбинный двигатель, переключающим генерирующую мощность и порядок подзарядки аккумуляторов от обратимого электромотора-генератора, работающего в режиме электрогенератора, но и совместной работы газотурбинного двигателя с последним, имеющим режим электромотора, или самостоятельной его работы только на один вал большего винта, при этом входная и выходная электромагнитные муфты сцепления, обеспечивающие дистанционное управление их сцеплением/расцеплением соответственно выходного вала заднего редуктора с валом обратимого электромотора-генератора и с валом шестилопастного толкающего большего винта, выполненного для снижения нагрузок, шума и вибраций в виде двухлопастного совместно с четырехлопастным X-образным винтом, устанавливаемого при расцеплении его вала с выходным валом обратимого электромотора-генератора во флюгерное положение так, что две нижние лопасти X-образного винта и две противолежащие лопасти двухлопастного винта располагаются по средней линии внутрикольцевых секций хвостового оперения обратной Y-образности соответственно стабилизатора и вертикального киля.
(где D и d - диаметры большего и трех меньших поворотных винтов соответственно), причем с целью как предотвращения момента рыскания при больших углах атаки и обеспечения управления по курсу мотогондола с верхним меньшим винтом, смонтированная на цельноповоротном внешнем вертикальном киле, вынесена за заднюю кромку последнего таким образом, что обеспечивает свободный его поворот в горизонтальной плоскости и влево, и вправо на угол ±15° относительно вертикальной оси киля, так и улучшения взлетно-посадочных характеристик и повышения при этом поперечной устойчивости, но и обеспечения поперечного и продольного управления балансировкой левая и правая мотогондолы с меньшими винтами, смонтированными на цельноповоротных внешних консолях стабилизатора, вынесены за заднюю кромку последнего таким образом, что обеспечивают свободное их вращение и снабжены возможностью расширенного диапазона соответственно их дифференциального и синфазного поворота в вертикальной плоскости относительно поперечной оси стабилизатора совместно с соответствующими меньшими винтами от горизонтального положения вниз и вверх соответственно с 0° до -35° и с 0°до +15°, причем с целью обеспечения выполнения технологии укороченного его взлета с четырехвинтовой движительной системой консоли цельноповоротного стабилизатора, установленные в промежуточное положение -15°, позволяющие совместно с горизонтальной тягой большего винта и верхнего меньшего винта достичь максимального ускорения при разбеге с одновременным автоматическим отклонением закрылок на максимальные углы, создающие максимальную подъемную силу переднего горизонтального оперения и крыла, снабжены возможностью синхронного и автоматического ускоренного синфазного отклонения совместно с левым и правым меньшими винтами вниз на угол с -15° до -35°, позволяющего достичь двух составляющих взлетной тяги: для движения вперед и одновременного вертикального подъема, силовая установка, выполненная по параллельно-последовательной гибридной технологии силового привода, включает внешние и гибридную мотогондолы с соответствующими винтами, первые три из которых, имея равные как между собой, так и их совместную горизонтальные тяги меньших винтов в сравнении с тягой большего винта, снабжены верхним, левым и правым электродвигателями, выполненными с возможностью их работы при различных углах отклонения в соответствующих плоскостях и вращательно связанными с соответствующими меньшими винтами, а гибридная мотогондола большего винта, в которой наряду с газотурбинным двигателем, имеющим в передней кромке форкиля его воздухозаборник и с задним расположением вал с его задним редуктором для отбора взлетной его мощности, снабжена обратимым электромотором-генератором, вращательно связанными через входную и выходную муфты сцепления соответственно с задним редуктором и большим винтом, и имеющая систему электропривода, включающую все электродвигатели, аккумуляторные перезаряжаемые батареи, преобразователь энергии с блоком управления силовой передачи, подключающим и отключающим электродвигатели и газотурбинный двигатель, переключающим генерирующую мощность и порядок подзарядки аккумуляторов от обратимого электромотора-генератора, работающего в режиме электрогенератора, но и совместной работы газотурбинного двигателя с последним, имеющим режим электромотора, или самостоятельной его работы только на один вал большего винта, при этом входная и выходная электромагнитные муфты сцепления, обеспечивающие дистанционное управление их сцеплением/расцеплением соответственно выходного вала заднего редуктора с валом обратимого электромотора-генератора и с валом шестилопастного толкающего большего винта, выполненного для снижения нагрузок, шума и вибраций в виде двухлопастного совместно с четырехлопастным X-образным винтом, устанавливаемого при расцеплении его вала с выходным валом обратимого электромотора-генератора во флюгерное положение так, что две нижние лопасти X-образного винта и две противолежащие лопасти двухлопастного винта располагаются по средней линии внутрикольцевых секций хвостового оперения обратной Y-образности соответственно стабилизатора и вертикального киля.
2. Электросамолет короткого взлета и посадки по п.1, отличающийся тем, что с целью увеличения аэродинамического качества, снижения индуктивного сопротивления, значительного повышения коэффициента подъемной силы крыла и несущей его способности он снабжен крылом C-образной формы, каждое верхнее большого удлинения стреловидное его внутреннее крылышко оснащено с положительным поперечным V относительно последнего внешним стреловидным крылышком малого удлинения, образующим как в плане переменную стреловидность и по передней, и по задней кромке с соответствующими кромками крыла, размещено со своей задней кромкой в плане таким образом, что находится при этом на одной линии с задней кромкой стреловидного крыла, так и в поперечной плоскости - трехэлементную T-образность с разновеликими верхними полками, меньшая из которых, отогнутая вверх и назад, образуя по передней и задней кромкам переменные стреловидности в плане, отталкивает поток воздуха вверх и назад, выходящий в вихревом обтекании из-под нижней поверхности крыла относительно ее внешнего крылышка.
| US 2013099065 A1, 25.04.2013 | |||
| WO 2012141736 A1, 18.10.2012 | |||
| МНОГОЦЕЛЕВОЙ МНОГОВИНТОВОЙ ВЕРТОЛЕТ-САМОЛЕТ | 2010 |
|
RU2448869C1 |
| WO 2009069109 A2, 04.06.2009 | |||

