Изобретение относится к лазерной технике, а именно к способам и устройствам определения наклонной дальности до цели, например, в системах автоматической посадки летательных аппаратов.
При известных значениях высоты полета летательного аппарата Н и угла визирования цели α, снимаемых в цифровом виде со штатных приборов летательного аппарата (радиовысотомер, гировертикаль или датчик угла системы наведения), наклонную дальность можно рассчитать из геометрических соображений. Недостатком такого способа является большая погрешность определения дальности при малых углах визирования цели.
Эту проблему решают локационные способы измерения дальности, включающие посылку на цель лазерного импульса, регистрацию момента посылки t0, прием отраженного целью излучения, регистрацию момента приема tD и определение временного интервала τ=tD-t0, по которому судят о дальности D до цели [В.А. Волохатюк, В.М. Кочетков, Р.Р. Красовский. Вопросы оптической локации. М.: Советское радио, 1971 г., с.176] по формуле D=cτ/2, где с - скорость света. Для малых углов визирования указанный способ обеспечивает высокую точность измерения наклонной дальности, однако в случае, когда требуется измерить дальность при больших значениях углов визирования и малых высотах, точность указанного способа резко снижается. В этом случае продольная протяженность облучаемого участка поверхности составляет десятки и даже сотни метров. При этом отражательные свойства цели могут оказаться меньше отражательных свойств некоторых элементов подстилающей поверхности. В этом случае величина выброса сигнала от цели может оказаться меньше или сопоставимой с выбросами от элементов подстилающей поверхности. Следовательно, сравнение отраженного сигнала с порогом может привести к ложному результату. В этом случае необходимо решать труднопреодолимую задачу распознавания истинного выброса от цели, так как выброс от цели является собственно элементом случайного процесса (или случайного поля), а не аддитивной смесью сигнала и помехи.
В наиболее общем виде локационные устройства для определения дальности включают следующие функциональные блоки [Мусьяков М.П., Миценко И.Д., Ванеев Г.Г. Проблемы ближней лазерной локации: Учебное пособие для ВТУЗов. - М.: Изд-во МГТУ им. Н.Э. Баумана, 2000 - 295 с.]: приемопередающий блок и блок обработки сигнала и принятия решения. В приемопередающем блоке с помощью лазерного излучателя и оптической системы формируется ноле излучения с пространственным углом 2β и поле приема сигнала, которое создается приемной системой и фотодетектором (фотоприемником). Зондирующий импульс направляется на участок пространства, в котором находится цель, расстояние до которой требуется определить. Блок обработки сигнала содержит усилитель, осуществляющий оптимальную обработку смеси сигнала с шумом, и схему измерения.
Наиболее близким по технической сущности к заявляемому изобретению является способ видения подводных объектов (RU 2397510 С2, G01S 17/88 от 07.07.2008).
Данный способ измерения включает посылку импульсного лазерного излучения в направлении цели, регистрацию интенсивности отраженного излучения, усиление зарегистрированного сигнала и определение дальности до цели.
В качестве прототипа для устройства измерения наклонной дальности по совокупности существенных признаков был выбран импульсный лазерный дальномер [Лебедько Е.Г. и др. Теория и расчет импульсных и цифровых оптико-электронных систем: Учебное пособие для ВУЗов по оптико-электронным специальностям/ Е.Г. Лебедько, Л.Ф. Порфирьев, Ф.И. Хайтун. - Л.: Машиностроение, Ленингр. отд-ние, 1984 - 191 с., ил.], включающий передающий канал, содержащий передающую оптическую систему и излучатель, и приемный канал, содержащий приемную оптическую систему, фотоприемник, усилитель с оптимальным фильтром и схему фиксации максимума, выход которой соединен со схемой измерения и управления, при этом выход излучателя соединен со светопроводом, выход которого соединен с фотоприемником.
К недостаткам описанных способов и устройств относится то, что во время измерения цель находится в поле зрения устройства, что может привести к неоднозначной идентификации сигнала от цели вследствие наличия в отраженном сигнале нескольких энергетических центров при большой продольной протяженности облучаемого участка поверхности. Таким образом, описанные выше способы и устройства оказываются непригодными для измерений наклонной дальности при больших углах визирования цели.
Поэтому задачей настоящего изобретения является разработка нового способа измерения наклонной дальности и устройства для его осуществления, который бы обеспечивал достижение следующего технического результата - абсолютная идентификация цели в условиях наличия нескольких энергетических центров в отраженном сигнале и, как следствие, сохранение высокой точности при любых углах визирования цели.
Указанный технический результат в заявляемом изобретении по п.1 достигается за счет того, что в способе измерения наклонной дальности, включающем посылку импульсного лазерного излучения в направлении цели, регистрацию интенсивности отраженного излучения, усиление зарегистрированного сигнала и определение дальности до цели, новым является то, что верхний край поля излучения совмещают с направлением на цель, а ширину полосы пропускания усилителя изменяют в зависимости от текущих значений высоты и угла визирования цели.
Указанный технический результат в заявляемом изобретении по п.2 достигается за счет того, что в устройстве измерения наклонной дальности, включающем передающий канал, содержащий передающую оптическую систему и излучатель, и приемный канал, содержащий приемную оптическую систему, фотоприемник, усилитель с оптимальным фильтром и схему фиксации максимума, выход которой соединен со схемой измерения и управления, при этом выход излучателя соединен со светопроводом, выход которого соединен с фотоприемником, новым является то, что при работе устройства верхний край поля излучения передающего канала совмещен с линией визирования, схема измерения и управления имеет два дополнительных входа, на которые подается информация о текущих значениях высоты и угла визирования цели, и два дополнительных управляющих выхода, первый из которых соединен с входом усилителя с управляемой шириной полосы пропускания, а второй - со схемой фиксации максимума.
Заявителем проведен патентный поиск по данной теме, и заявляемая совокупность существенных признаков не выявлена.
Сущность изобретения поясняется чертежами.
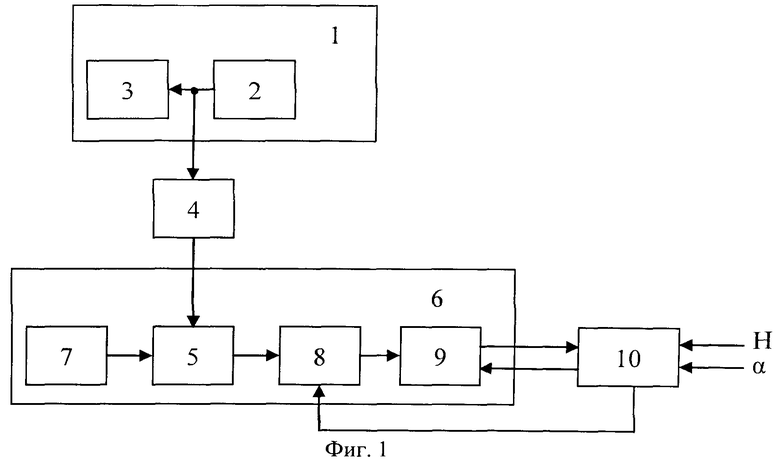
На фигуре 1 приведена структурная схема устройства измерения наклонной дальности, где: 1 - передающий канал, 2 - излучатель, 3 - передающая оптическая система, 4 - светопровод, 5 - фотоприемник, 6 - приемный канал, 7 - приемная оптическая система, 8 - усилитель с оптимальным фильтром, 9 - схема фиксации максимума, 10 - схема измерения и управления, H и α - текущие значения высоты и угла визирования цели.
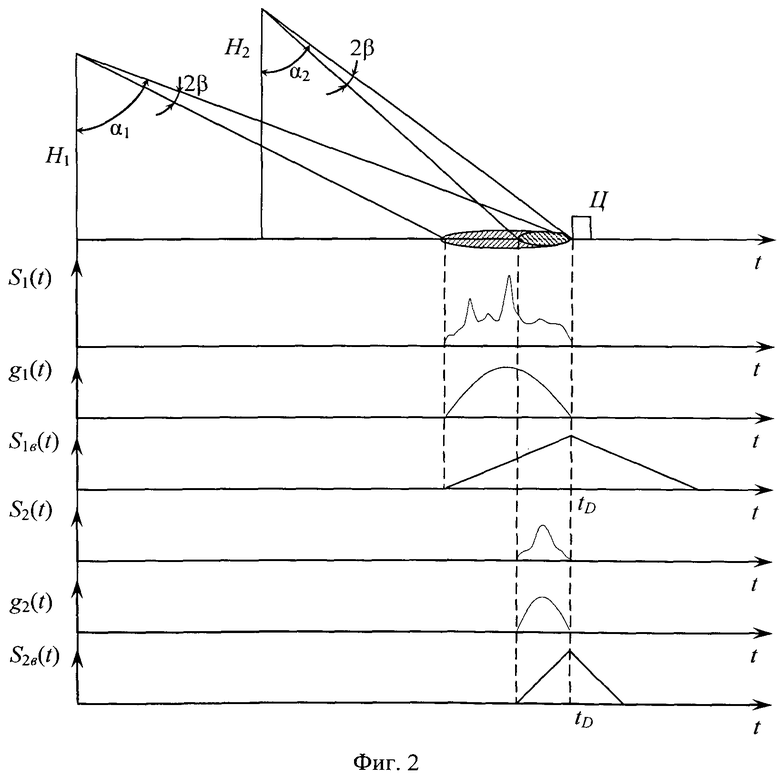
На фигуре 2 приведены временные диаграммы, поясняющие работу способа и устройства измерения наклонной дальности для двух различных значений высоты носителя H1 и H2. и углов визирования цели α1 и α2, где: S1(t) и S2(t) - возможные сигналы, содержащие информацию об интенсивности излучения, отраженного от различных точек зондируемой поверхности, g1(t), g2(t) - импульсные характеристики усилителя, соответствующие по длительности сигналам S1(t) и S2(t), S1B(t), S2B(t) - сигналы на выходе усилителя, Ц - цель, 2β - угол расходимости передающего канала, t - время, tD - временное положение цели.
Заявляемые способ и устройство работают следующим образом.
Передающий канал 1 посредством излучателя 2 и передающей оптической системы 3 формирует пучок излучения с расходимостью 2β. Это излучение направляется на подстилающую поверхность с высоты Н под углом визирования α. Верхний край поля излучения совмещается с линией визирования (тем самым происходит облучение подстилающей поверхности перед целью). Часть излучения заводится посредством светопровода 4 на фотоприемник 5 приемного канала 6. На фотоприемник 5 также попадает отраженное от поверхности излучение, прошедшее через приемную оптическую систему 7, который производит регистрацию интенсивности отраженного излучения, преобразуя его в электрический сигнал. Сигнал S(t) с выхода фотоприемника 5 поступает на усилитель с оптимальным фильтром 8, где осуществляется усиление зарегистрированного сигнала. Далее усиленный сигнал SB(t) подается на вход схемы фиксации максимума 9, определяющую временное положение максимума tD на выходе усилителя с оптимальным фильтром 8. Полученное значение tD, определяющее временное положение цели, подается на вход схемы измерения и управления 10, осуществляющей вычисление наклонной дальности до цели.
Поскольку при измерении наклонной дальности длительность отраженного сигнала S(t) варьируется в зависимости от высоты Н и угла α (фигура 2), то ширина полосы пропускания, а вместе с ней и длительность импульсной характеристики g(t), усилителя с оптимальным фильтром 8 изменяются под действием сигнала на управляющем выходе схемы измерения и управления 10. В этом случае, какова бы ни была амплитудно-временная структура отраженного сигнала S(t) (фигура 2), максимум tD сигнала SB(t) на выходе усилителя 8 всегда будет соответствовать окончанию отраженного сигнала, а следовательно, временному положению цели tD, вне зависимости от количества энергетических центров в отраженном сигнале. Для сохранения точности определения момента максимума сигнала tD схема измерения и управления 10 имеет дополнительный выход, управляющий постоянной времени схемы фиксации максимума 9, поскольку в случае короткого S2B(t) сигнала на выходе усилителя 8 дифференцирующая часть схемы 9 должна обеспечивать большую крутизну перепада напряжений, чем при длительных сигналах S1B(t) [Лебедько Е.Г. и др. Теория и расчет импульсных и цифровых оптико-электронных систем: Учебное пособие для ВУЗов по оптико-электронным специальностям/ Е.Г. Лебедько, Л.Ф. Порфирьев, Ф.И. Хайтун. - Л.: Машиностроение, Ленингр. отд-ние, 1984 - 191 с., ил.].
Пример конкретного исполнения
Фотоприемник 5 может быть выполнен в виде фотодиода. Усилитель 8 может быть выполнен на операционном усилителе, изменение ширины полосы пропускания которого и изменение постоянной времени дифференцирующей цепи в схеме фиксации максимума 9 осуществляется посредством использования варикапов управляющим напряжением, которое формируется схемой измерения и управления 10, выполненной в виде микроконтроллера. Текущие значения высоты H и угла визирования α в цифровом виде снимаются со штатных приборов летательного аппарата (радиовысотомер, гировертикаль или датчик угла системы наведения). Светопровод может быть выполнен из оптоволоконного кабеля. Схема фиксации максимума 9 может быть выполнена из последовательно расположенных порогового устройства, дифференцирующей цепи, усилителя и релаксатора [Лебедько Е.Г. и др. Теория и расчет импульсных и цифровых оптико-электронных систем: Учебное пособие для ВУЗов по оптико-электронным специальностям/ Е.Г. Лебедько, Л.Ф.Порфирьев, Ф.И. Хайтун. - Л.: Машиностроение, Ленингр. отд-ние, 1984 - 191 с., ил.].
Таким образом, заявляемое изобретение обеспечивает достижение заявленного технического результата - абсолютную идентификацию цели в условиях наличия нескольких энергетических центров в отраженном сигнале и, как следствие, сохранение высокой точности при любых углах визирования цели.
| название | год | авторы | номер документа |
|---|---|---|---|
| Лазерный дальномер | 2017 |
|
RU2650851C1 |
| ОПТИКО-ЭЛЕКТРОННЫЙ СЛЕДЯЩИЙ КООРДИНАТОР | 2011 |
|
RU2476826C1 |
| ПРИБОР ДЛЯ ДНЕВНОГО И НОЧНОГО НАБЛЮДЕНИЯ И ПРИЦЕЛИВАНИЯ | 2006 |
|
RU2310219C1 |
| ЛАЗЕРНЫЙ ДАЛЬНОМЕР | 2010 |
|
RU2439492C1 |
| ЛАЗЕРНЫЙ КОГЕРЕНТНЫЙ ЛОКАТОР ДЛЯ РАКЕТ МОРСКОГО БАЗИРОВАНИЯ | 2014 |
|
RU2565821C1 |
| Способ неконтактного подрыва и неконтактный датчик цели | 2021 |
|
RU2771003C1 |
| ЛАЗЕРНЫЙ КОГЕРЕНТНЫЙ ЛОКАТОР ЦЕЛЕУКАЗАНИЯ | 2014 |
|
RU2563312C1 |
| ЛАЗЕРНЫЙ ЛОКАТОР | 2011 |
|
RU2456636C1 |
| Способ локационного измерения дальности | 2021 |
|
RU2766065C1 |
| УСТРОЙСТВО ДЛЯ ФОКУСИРОВКИ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ НА ОБЪЕКТ | 2005 |
|
RU2301496C1 |
Изобретение относится к способу и устройству определения наклонной дальности до цели. Сущность изобретения состоит в том, что при посылке лазерного излучения в направлении цели верхний край поля излучения передающего канала, включающего передающую оптическую систему и излучатель, совмещают с направлением на цель, в приемном канале осуществляют регистрацию, усиление и оптимальную фильтрацию сигнала с измерением момента максимума отфильтрованного сигнала. Определение дальности до цели производят схемой измерения и управления, которая имеет два дополнительных входа, на которые подается информация о текущих значениях высоты и угла визирования цели, и два дополнительных управляющих выхода, первый из которых соединен с входом усилителя с управляемой шириной полосы пропускания, а второй - со схемой фиксации максимума. Технический результат - идентификация цели в условиях наличия нескольких энергетических центров в отраженном сигнале и, как следствие, сохранение высокой точности при различных углах визирования цели. 2 н.п. ф-лы, 2 ил.
1. Способ измерения наклонной дальности, включающий посылку импульсного лазерного излучения в направлении цели, регистрацию интенсивности отраженного излучения, усиление зарегистрированного сигнала и определение дальности до цели, отличающийся тем, что верхний край поля излучения совмещают с направлением на цель, а ширину полосы пропускания усилителя изменяют в зависимости от текущих значений высоты и угла визирования цели.
2. Устройство измерения наклонной дальности, включающее передающий канал, содержащий передающую оптическую систему и излучатель, и приемный канал, содержащий приемную оптическую систему, фотоприемник, усилитель с оптимальным фильтром и схему фиксации максимума, выход которой соединен со схемой измерения и управления, при этом выход излучателя соединен со светопроводом, выход которого соединен с фотоприемником, отличающееся тем, что при работе устройства верхний край поля излучения передающего канала совмещен с линией визирования, схема измерения и управления имеет два дополнительных входа, на которые подается информация о текущих значениях высоты и угла визирования цели, и два дополнительных управляющих выхода, первый из которых соединен с входом усилителя с управляемой шириной полосы пропускания, а второй - со схемой фиксации максимума.
| Стереоприбор | 1934 |
|
SU43792A1 |
| KR 0101200795 B1 13.11.2012 | |||
| JPS 5917182 A 28.01.1984 | |||
| JP 2000131063 A 12.05.2000 A | |||
| JP2001349708 A 21.12.2001 | |||

