Область техники. Группа изобретений относится к области машиностроения и может быть использована в качестве комбинированного гидромеханического привода осевого перемещения согласующей планетарной передачи в многодиапазонной многопоточной трансмиссии.
Уровень техники. Известен исполнительный (силовой) гидроцилиндр двухстороннего действия с неподвижно закрепленным цилиндром и подвижным односторонним штоком (Некрасов Б.Б. Гидравлика, насосы и гидроприводы. М., Высшая школа, 1974, стр.351, рис.3.54, б). Это устройство принято за аналог одного из предлагаемых изобретений группы. Недостатком указанного устройства является большой габаритный размер в продольном направлении.
Известен компактный в продольном направлении исполнительный (силовой) гидроцилиндр двухстороннего действия с неподвижно закрепленным двухсторонним штоком и поршнем, и с подвижным цилиндром (Некрасов Б.Б. Гидравлика, насосы и гидроприводы. М., Высшая школа, 1974, стр.353, рис.3.55, б). На штоке и поршне гидроцилиндра выполнены три соосные внешние цилиндрические поверхности скольжения, сопрягающиеся с соответствующими внутренними цилиндрическими поверхностями скольжения, выполненными на подвижном цилиндре. Указанные сопряжения поверхностей образуют две замкнутые рабочие полости, сообщающиеся с гидрораспределителем посредством каналов. Это устройство по совокупности существенных признаков наиболее близко к одному из предлагаемых изобретений группы и принято за его прототип. Недостатком указанного устройства является то, что на одном подвижном цилиндре невозможно разместить осесимметричный рабочий орган (например, блок зубчатых колес) таким образом, чтобы ось рабочего органа совпадала с осью приложения силы от гидроцилиндра.
Известен механизм пружинного центрирования золотника гидрораспределителя в промежуточном положении (Свешников В.К. Гидрооборудование: Международный справочник. Книга 2. Гидроаппаратура: Номенклатура, параметры, размеры, взаимозаменяемость. ООО "Издательский центр "Техинформ" МАИ" - 2002, стр.65), включающий две пружины сжатия, воздействующие на золотник противонаправленными силами, причем ход одной из пружин в направлении отбоя ограничен в точке промежуточного положения золотника посредством буртика в корпусе гидрораспределителя. Это устройство по совокупности существенных признаков наиболее близко к другому предлагаемому изобретению группы и принято за его прототип. Недостатком устройства-прототипа в указанной области применения является то, что поворот приводимого элемента (золотника) в промежуточном положении вокруг собственной оси вызывает сдвиг опорных поверхностей пружины относительно золотника и может привести к нерасчетной деформации пружин и повреждению опорных поверхностей кромками опорных витков.
Известна многодиапазонная бесступенчатая трансмиссия (патент RU №2460919, авторы Давыдов В.В., Гулиа Н.В., 2010), включающая дифференциальный блок, варьирующее звено, входной вал, выходной вал и планетарный механизм согласующей коробки передач, причем поочередное кинематическое соединение выходного звена планетарного механизма согласующей коробки передач с выходными звеньями дифференциального блока выполнено путем осевого перемещения водила планетарного механизма с фиксацией этого перемещения на соответствующих соединениях. Привод перемещения водила планетарного механизма с фиксацией этого перемещения на соответствующих соединениях включает вилку, связанную с водилом. Указанное устройство по совокупности существенных признаков наиболее близко к третьему предлагаемому изобретению группы и принято за его прототип. Недостатком данного прототипа является то, что привод посредством вилки содержит избыточные промежуточные звенья независимо от типа приводного двигателя.
Задача изобретения. Задачей изобретения является создание комбинированного гидромеханического привода осевого перемещения планетарного механизма в согласующей коробке передач многодиапазонной многопоточной трансмиссии, включающего гидравлический и механический приводы, и обеспечивающего минимальные размеры, возможность принудительного перемещения планетарного механизма в одно из нескольких промежуточных положений посредством механического привода при отказе гидравлического привода, а также эффективное предотвращение спонтанного вращения звеньев планетарного механизма согласующей коробки передач в одном из промежуточных положений привода.
Сущность изобретения. Указанная задача решается тем, что предлагается исполнительный гидроцилиндр двухстороннего действия, включающий неподвижную и подвижную части, на неподвижной части выполнены три соосных цилиндрических поверхности скольжения - срединная и две крайних, расположенных по обе стороны от срединной и соединенных между собой двумя торцевыми поверхностями, на подвижной части выполнены три соосных цилиндрических поверхности скольжения - срединная и две крайних, расположенных по обе стороны от срединной и соединенных между собой двумя торцевыми поверхностями, каждая из трех цилиндрических поверхностей скольжения неподвижной части сопрягается с соответствующей цилиндрической поверхностью скольжения подвижной части, указанные поверхности и их сопряжения образуют две замкнутых кольцевых полости, каждая из которых соединена с подводящей магистралью, и характеризующийся тем, что цилиндрические поверхности скольжения неподвижной части выполнены внутренними, сопряженные с ними цилиндрические поверхности скольжения подвижной части выполнены внешними, причем диаметр срединных поверхностей скольжения меньше диаметров крайних цилиндрических поверхностей скольжения, а в подвижной части выполнено сквозное цилиндрическое отверстие, соосное с цилиндрическими поверхности скольжения.
Другой особенностью предлагаемого гидроцилиндра двухстороннего действия является то, что диаметры крайних внешних цилиндрических поверхностей скольжения подвижной части гидроцилиндра равны между собой, а диаметры крайних внутренних цилиндрических поверхностей скольжения неподвижной части гидроцилиндра также равны между собой.
Следующей особенностью предлагаемого гидроцилиндра двухстороннего действия является то, что на одной из цилиндрических поверхностей скольжения в каждой из трех сопрягающихся пар выполнены подвижные радиальные контактные уплотнения.
Следующей особенностью предлагаемого гидроцилиндра двухстороннего действия является то, что торцевые поверхности подвижной и неподвижной частей гидроцилиндра выполнены плоскими.
В другом варианте выполнения особенностью предлагаемого гидроцилиндра двухстороннего действия является то, что торцевые поверхности подвижной и неподвижной частей гидроцилиндра выполнены коническими.
Следующей особенностью предлагаемого гидроцилиндра двухстороннего действия является то, что в торцевых поверхностях подвижной и неподвижной частей гидроцилиндра соосно выполнено сквозное отверстие, ось которого параллельна общей оси цилиндрических поверхностей скольжения, и в котором размещена пустотелая втулка, причем упомянутая втулка закреплена неподвижно и герметично в подвижной части, а сопряжение втулки с отверстием в перегородке неподвижной части гидроцилиндра содержит подвижное радиальное контактное уплотнение.
Следующей особенностью предлагаемого гидроцилиндра двухстороннего действия является то, что пустотелая втулка выполнена из ферромагнитного материала, а в полости пустотелой втулки размещен чувствительный элемент неподвижно закрепленного на корпусе бесконтактного датчика линейного перемещения подвижной части гидроцилиндра.
Следующей особенностью предлагаемого гидроцилиндра двухстороннего действия является то, что отверстия для подвода и отвода текучей среды выполнены в верхней части торцевых поверхностей перегородки, причем вдоль окружности перегородки выполнены два изолированных друг от друга канала, а в верхней части перегородки каждый из упомянутых каналов сообщается с соответствующим отверстием в торцевой поверхности перегородки, а в нижней части перегородки каждый из упомянутых каналов сообщается с соответствующей подводящей магистралью.
Следующей особенностью предлагаемого гидроцилиндра двухстороннего действия является то, что подвижная часть выполнена разъемной, с, по меньшей мере, одной плоскостью разъема, причем плоскость разъема проходит через границу срединной внешней цилиндрической поверхности скольжения и одной из торцевых поверхностей подвижной части.
Следующей особенностью предлагаемого гидроцилиндра двухстороннего действия является то, что неподвижная часть гидроцилиндра выполнена разъемной, с, по меньшей мере, одной плоскостью разъема, причем плоскость разъема проходит через границу одной из крайних внутренних цилиндрических поверхностей скольжения и примыкающей к ней торцевой поверхности перегородки.
Следующей особенностью предлагаемого гидроцилиндра двухстороннего действия является то, что между подводящих магистралей выполнен перепускной клапан любого типа с механическим приводом.
Задача изобретения решается также тем, что предлагается механизм центрирования привода линейного перемещения, включающий неподвижный корпус, закрепленный на нем первый пружинный механизм с ограниченным ходом отбоя, воздействующий на подвижную часть привода в прямом направлении его перемещения на части полного хода, и закрепленный на корпусе второй пружинный механизм, воздействующий на подвижную часть привода в обратном направлении его перемещения на полном ходу, и характеризующийся тем, что первый пружинный механизм включает, по меньшей мере, одну пружину сжатия с толкателем, головка которого в пределах рабочего хода первого пружинного механизма контактирует с частью привода, совершающей, помимо поступательного движения, независимое вращательное движение таким образом, что сила трения головки толкателя об эту часть привода создает тормозной момент, препятствующий ее вращению.
Другой особенностью предлагаемого механизма центрирования привода линейного перемещения является то, что второй пружинный механизм включает одну центральную пружину, а первый пружинный механизм включает несколько пружин с толкателями, оси которых расположены по окружности, равноудаленно от оси центральной пружины второго пружинного механизма.
Следующей особенностью предлагаемого механизма центрирования привода линейного перемещения является то, что он дополнительно содержит рычажно-кулачковый механизм для перемещения привода из первого промежуточного положения во второе промежуточное положение, включающий, по меньшей мере, один кулачок и один приводной элемент, закрепленные на общем валу, и выполненные таким образом, что указанный вал может совершать как вращательное движение вокруг своей оси, так и поступательное движение вдоль этой оси, а кулачок выполнен с возможностью соприкосновения с подвижной частью привода линейного перемещения, причем перемещение привода из первого промежуточного положения во второе промежуточное положение осуществляется при повороте упомянутого приводного элемента и вала вокруг своей оси.
Следующей особенностью предлагаемого механизма центрирования привода линейного перемещения является то, что в неподвижном корпусе выполнена, по меньшей мере, одна выемка по форме кулачка рычажно-кулачкового механизма, в которой этот кулачок утоплен в нерабочем положении рычажно-кулачкового механизма.
Следующей особенностью предлагаемого механизма центрирования привода линейного перемещения является то, что рычажно-кулачковый механизм включает пружину, удерживающую кулачок утопленным в выемку неподвижного корпуса в нерабочем положении рычажно-кулачкового механизма.
Следующей особенностью предлагаемого механизма центрирования привода линейного перемещения является то, что выемка неподвижного корпуса имеет наклонные стенки, а ближняя к корпусу кромка кулачка имеет фаску по контуру в местах возможного соприкосновения с наклонными стенками выемки таким образом, что при приложении крутящего момента со стороны приводного элемента рычажно-кулачкового механизма на утопленный кулачок действует сила, приводящая к выдвиганию кулачка из выемки неподвижного корпуса.
Следующей особенностью предлагаемого механизма центрирования привода линейного перемещения является то, что дальняя от корпуса кромка кулачка имеет фаску по контуру в местах возможного соприкосновения с подвижной частью привода линейного перемещения, а подвижная часть привода имеет соответствующую наклонную поверхность в местах возможного соприкосновения с кулачком таким образом, что при приложении к приводу линейного перемещения силы, на выдвинутый кулачок действует сила, приводящая к утапливанию кулачка в выемке неподвижного корпуса.
Следующей особенностью предлагаемого механизма центрирования привода линейного перемещения является то, что рычажно-кулачковый механизм включает пружинный фиксатор, удерживающий приводной элемент во втором промежуточном положении привода линейного перемещения с заданной предельной силой, превышающей силу противодействия второго пружинного механизма, а форма сопрягающихся поверхностей и угол поворота кулачка в этом положении обеспечивают возможность обратного перемещения привода из второго промежуточного положения в первое промежуточное положение при превышении заданной предельной силы без заклинивания рычажно-кулачкового механизма.
Следующей особенностью предлагаемого механизма центрирования привода линейного перемещения является то, что приводной элемент рычажно-кулачкового механизма выполнен в виде рычага ручного управления, размещенного непосредственно на корпусе трансмиссии.
В другом варианте выполнения особенностью предлагаемого механизма центрирования привода линейного перемещения является то, что приводной элемент рычажно-кулачкового механизма выполнен в виде рычага, соединенного с приводом дистанционного управления.
Следующей особенностью предлагаемого механизма центрирования привода линейного перемещения является то, что рычажно-кулачковый механизм включает несколько кулачков с приводными элементами, закрепленные каждый на своем валу.
Следующей особенностью предлагаемого механизма центрирования привода линейного перемещения является то, что он содержит механизм синхронизации поворота кулачков рычажно-кулачкового механизма.
Задача изобретения решается также тем, что предлагается привод, включающий неподвижный корпус, планетарный механизм с, по меньшей мере, одним звеном, подвижным как вдоль центральный оси планетарного механизма, так и вокруг нее, характеризующийся тем, что он содержит исполнительный гидроцилиндр двухстороннего действия, неподвижная часть которого связана с корпусом, а подвижная часть связана с упомянутым звеном планетарного механизма посредством способного нести осевую нагрузку подшипника, причем составные части привода могут включать любые особенности, перечисленные выше.
Другой особенностью предлагаемого привода является то, что в каждой подводящей магистрали исполнительного гидроцилиндра двухстороннего действия выполнен сливной клапан любого типа с механическим приводом.
Краткое описание чертежей. Устройство представлено на 7 фигурах.
На фиг.1 изображен предлагаемый комбинированный привод в первом промежуточном положении, с утопленным кулачком рычажно-кулачкового механизма.
На фиг.2 изображен предлагаемый комбинированный привод в первом промежуточном положении, с выдвинутым кулачком рычажно-кулачкового механизма.
На фиг.3 изображен предлагаемый комбинированный привод во втором промежуточном положении, с выдвинутым и повернутым на максимальный угол кулачком рычажно-кулачкового механизма.
На фиг.4 изображен предлагаемый комбинированный привод в одном из крайних положений, с утопленным кулачком рычажно-кулачкового механизма.
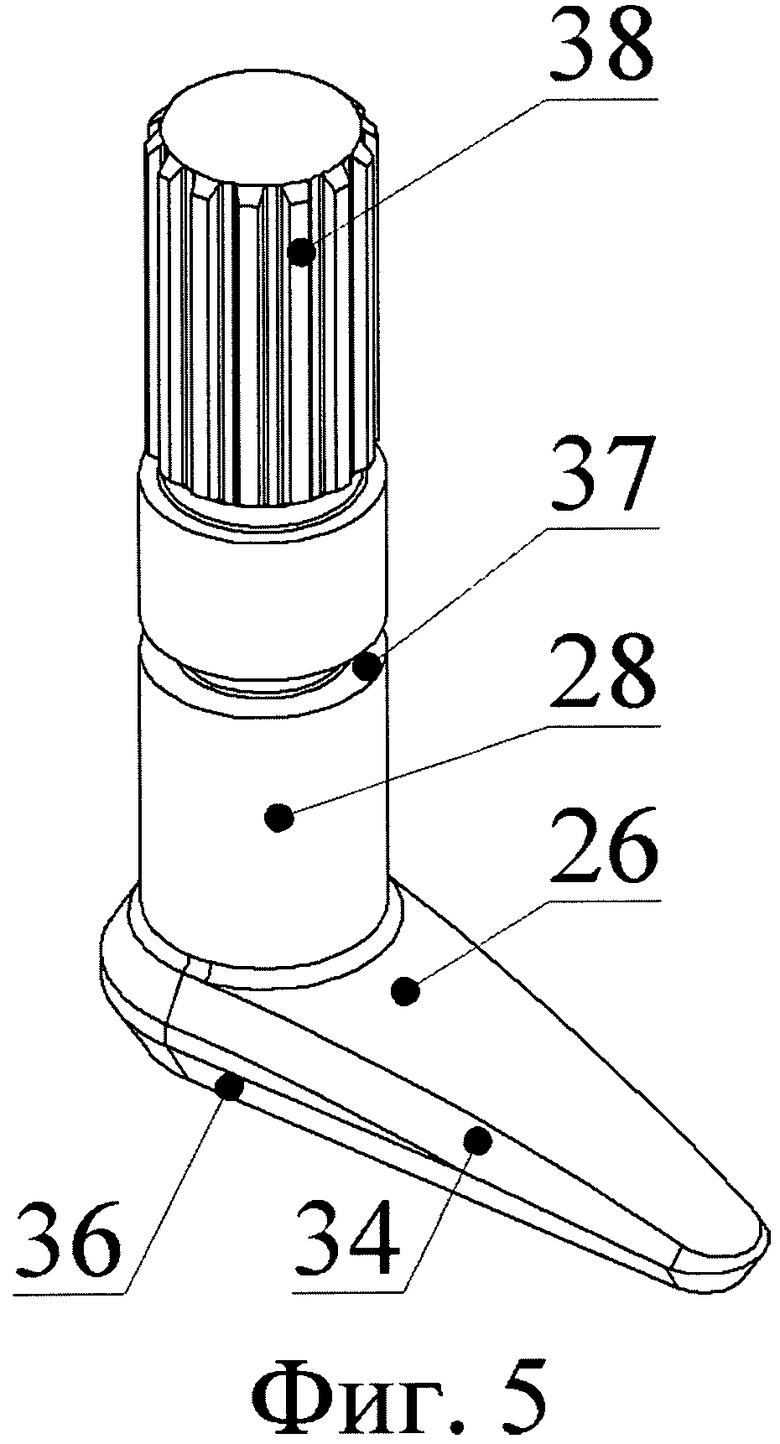
На фиг.5 изображен кулачок рычажно-кулачкового механизма, входящего в состав предлагаемого комбинированного привода.
На фиг.6 изображен фрагмент гидравлической схемы комбинированного привода в исполнении с аварийными сливными клапанами в подводящих линиях рабочих полостей гидроцилиндра.
На фиг.7 изображен фрагмент гидравлической схемы комбинированного привода в исполнении с аварийным перепускным клапаном между подводящими линиями рабочих полостей гидроцилиндра.
Описание изобретения.
Комбинированный гидромеханический привод (фиг.1-4) предназначен для перемещения внутри передней части корпуса 1 трансмиссии звеньев планетарного механизма согласующей коробки передач (большого центрального колеса 2 и водила 3 с сателлитами 4) в направлении оси 5. Комбинированный привод включает один гидравлический и два механических привода.
В основе гидравлического привода лежит исполнительный гидроцилиндр двухстороннего действия с двумя замкнутыми кольцевыми рабочими полостями 6 и 7, включающий неподвижную и подвижную части. Неподвижная часть гидроцилиндра образована двумя соосными внутренними цилиндрическими поверхностями, выполненными в передней части корпуса 1 и задней части корпуса 8, а также перегородкой 9. В одном из вариантов предлагаемого гидроцилиндра диаметры упомянутых соосных внутренних цилиндрических поверхностей могут быть равными. Через перегородку 9 рабочие полости 6 и 7 сообщаются с подводящими каналами 10 и 11, соответственно. Подвижная часть гидроцилиндра (плунжер) состоит из задней части 12 и передней крышки 13. Образующие плунжер детали 12 и 13 соединены, например, посредством резьбового соединения, а перегородка 9 зажата между частями корпуса 1 и 8. Цилиндрические поверхности подвижной и неподвижной частей гидроцилиндра образуют три подвижных сопряжения с контактными радиальными гидравлическими уплотнениями 14, 15 и 16. В цилиндрической расточке плунжера размещены детали планетарного механизма, связанные с плунжером посредством шарикоподшипника 17 радиального либо радиально-упорного типа. В задней части 12 и передней крышки 13 плунжера герметично закреплена пустотелая втулка (трубка) 18, выполненная из ферромагнитного материала. Трубка насквозь проходит через перегородку 9, сопряжение с которой выполнено посредством радиального контактного гидравлического уплотнения 19. В полость пустотелой втулки входит чувствительный элемент 20 датчика линейного перемещения, корпус 21 которого неподвижно закреплен в задней части корпуса 8 трансмиссии.
Первый механический привод (механизм пружинного центрирования) предназначен для автоматического возврата большого центрального колеса 2 и водила 3 с сателлитами 4 в первое промежуточное положение (фиг.1), и включает два пружинных механизма. Первый пружинный механизм состоит из одной или нескольких пружин 22, установленных по окружности, вокруг оси 5, враспор между передней частью корпуса 1 (или связанными с ним деталями) и толкателями 23. Толкатели 23 являются ограничителями хода отбоя пружин 22, упираясь выполненным на них поясками в бурты 24 передней части корпуса 1. Внешняя торцевая часть толкателей 23 выполнено с возможностью упора в плоскую торцевую поверхность водила 3. Второй пружинный механизм включает пружину 25, установленную враспор между задней частью корпуса 8 трансмиссии и задней частью 12 плунжера. В первом промежуточном положении привода (фиг.1) суммарная сила пружин 22 превышает силу пружины 25, а толкатели 23 упираются выполненным на них поясками в бурты 24 передней части корпуса 1.
Второй механический привод предназначен для перевода большого центрального колеса 2 и водила 3 с сателлитами 4 во второе промежуточное положение (фиг.3) из первого промежуточного положения (фиг.1) и включает кулачок 26 и приводной элемент 27, жестко закрепленные на общем валу 28. В передней части корпуса 1 выполнена выемка 29 по форме кулачка, с уклоном стенок наружу. Пружина 30 установлена враспор между приводным элементом 27 и передней частью корпуса 1. С приводным элементом 27 связано звено, приводящее его во вращение, в виде, например, рычага 31 ручного управления. На задней части корпуса 8 закреплен пружинно-шариковый фиксатор 32, во втором промежуточном положении привода (фиг.3) входящий в соответствующий треугольный паз 33, выполненный в рычаге 31.
На верхней кромке кулачка 26 (фиг.5), расположенной ближе к поверхности передней части корпуса 1, по контуру выполнена верхняя фаска 34, предназначенная для взаимодействия с наклонными стенками выемки 29 (фиг.1-4). На кромке большого центрального колеса 2 выполнена круговая фаска 35. На нижней кромке кулачка 26, расположенной дальше от поверхности передней части корпуса 1, по контуру выполнена нижняя фаска 36 (фиг.5), предназначенная для взаимодействия с фаской 35 (фиг.1-4).
Углы фасок 34, 35 и 36 выбраны таким образом, чтобы рычажно-кулачковый механизм не самозаклинивал во всех возможных взаимных положениях деталей и составляют приблизительно 30-60°. На валу 28 выполнены канавка 37 для уплотнительного элемента и хвостовик 38 (фиг.5) для соединения с приводным элементом 27 (фиг.1-3).
Для разблокирования гидравлического привода в случае его отказа, при любом исполнении гидроцилиндра, к подводящим магистралям 39 и 40, соединенным с подводящими каналами 10 и 11, соответственно, подключены аварийные сливные клапаны 41 и 42 с механическим управлением (фиг.6).
В варианте предлагаемого гидроцилиндра по фиг.1-3 с равными диаметрами соосных внутренних цилиндрических поверхностей вместо клапанов 41 и 42 может быть применен один перепускной клапан 43 с механическим управлением, установленный между подводящих магистралей 39 и 40 (фиг.7), поскольку суммарный объем полостей 6 и 7 в этом случае остается постоянным в любом положении плунжера.
В состав гидравлического привода также входит трехпозиционный четырехлинейный золотниковый гидрораспределитель 44 с возвратными пружинами 45.
Описание работы. Комбинированный гидромеханический привод работает следующим образом.
В штатном режиме работы трансмиссии кулачок 26 рычажно-кулачкового механизма ориентирован по выемке 29 в передней части корпуса 1 и утоплен в ней (фиг.1) таким образом, что он не создает помех перемещению большого центрального колеса 2 вдоль оси 5 вплоть до крайнего положения привода (фиг.4). Пружина 30 с натягом удерживает кулачок 26 в выемке 29, прижимая его к наклонным стенки выемки 29, и тем самым препятствуя перемещениям кулачка 26 под действием вибраций корпуса трансмиссии. Клапаны 41 и 42 (клапан 43 в другом варианте реализации предлагаемого изобретения) закрыты. Гидрораспределитель 44 управляет потоками рабочей жидкости, поступающими через каналы 10 и 11 в полости 6 и 7, в результате чего плунжер перемещается между двумя крайними положениями, соответствующими минимальному объему полости 6 либо полости 7. Перемещение плунжера приводит к связанному с ним перемещению подшипника 17 и деталей планетарного механизма (большого центрального колеса 2 и водила 3 с сателлитами 4). Положение плунжера определяется посредством датчика 21. Выходной сигнал датчика связан с величиной взаимного осевого перекрытия пустотелой втулки 18 из ферромагнитного материала и чувствительного элемента 20 датчика 21. Развиваемая гидроцилиндром сила значительно превышает силы пружин 22 и 25 первого механического привода, поэтому они не оказывают существенного противодействия перемещению плунжера в штатном режиме работы привода.
Первое промежуточное положение привода (фиг.1) соответствует нейтрали в трансмиссии. Благодаря наличию ограничения хода отбоя первого пружинного механизма, это положение является устойчивым и нечувствительным к внешним возмущающим силам в пределах сил пружин 22 и 25 в этом положении. В первом промежуточном положении привода планетарный механизм согласующей коробки передач имеет избыточную степень свободы, что может привести к самопроизвольному раскручиванию звеньев под действием паразитных моментов трения и воспрепятствовать дальнейшему безударному включению передачи. Упор внешней торцевой части толкателей 23 в торцевую поверхность водила 3 с одной стороны привода, и усилие пружины 25 с противоположной стороны блокируют избыточную степень свободы планетарного механизма посредством силы трении, возникающей в контакте толкателей 23 и водила 3 при вращении последнего. Оси толкателя 23 и водила 3 не совпадают, поэтому, при проскальзывании указанных деталей, вращения толкателей 23 не возникает, что устраняет потенциальный износ опорных поверхностей пружин 22, передней части корпуса 1 и толкателей 23. В то же время, сила трения прикладывается на большом радиусе от оси 5, что способствует эффективному торможению водила 3.
При отказе элементов гидравлического привода, золотник гидрораспределителя 44 автоматически возвращается в среднее положение посредством пружин 45, перекрывая подводящие магистрали 39 и 40, и тем самым блокируя плунжер гидроцилиндра. Многодиапазонная бесступенчатая трансмиссия с планетарной согласующей коробкой передач имеет два возможных аварийных режима - режим буксировки и режим принудительного включения фиксированной передачи. Режим буксировки соответствует первому промежуточному положению привода (положению нейтрали в трансмиссии, фиг.1). Режим принудительного включения фиксированной передачи соответствует второму промежуточному положению привода (фиг.3). Перед включением любого из указанных аварийных режимов необходимо открыть клапаны 41 и 42 (клапан 43 в другом варианте реализации предлагаемого изобретения). Открытие указанных клапанов распускает гидроцилиндр, обеспечивая возможность принудительного перемещения его плунжера посредством механических приводов.
После открытия клапанов 41 и 42 (клапана 43 в другом варианте реализации предлагаемого изобретения) детали планетарного механизма (большого центрального колеса 2 и водила 3 с сателлитами 4) автоматически перемещаются в первое промежуточное положение (фиг.1) посредством первого механического привода (механизма пружинного центрирования). Перемещение из одного крайнего положения (фиг.4) происходит под действием пружин 22 первого пружинного механизма привода, а из другого крайнего положения или других промежуточных положений - посредством пружины 25 второго пружинного механизма привода.
Перевод привода из первого промежуточного положения во второе промежуточное положение осуществляется посредством рычажно-кулачкового механизма при открытых клапанах 41 и 42 (клапана 43 в другом варианте реализации предлагаемого изобретения). Для перевода привода рычаг 31 поворачивают вокруг оси вручную или посредством дистанционного механического привода (на фигурах не представлен). При повороте вала 28 верхняя фаска 34 кулачка 26 (фиг.5) упирается в наклонную стенку выемки 29, в результате чего кулачок 26 выдвигается из выемки 29 одновременно с поворотом вокруг оси вала 28, преодолевая усилие пружины 30 (фиг.2). При дальнейшем повороте вала 28 участок нижней фаски 36 кулачка 26 упирается в фаску 35 большого центрального колеса 2 и воздействует на нее силой, имеющей составляющую, направленную вдоль оси 5. Детали планетарного механизма и связанный с ним плунжер гидроцилиндра перемещаются во второе промежуточное положение (фиг.3), участок контакта кулачка 26 с большим центральным колесом 2 при этом смещается к вершине кулачка 26. Угол контакта кулачка 26 с большим центральным колесом 2 во втором промежуточном положении остается меньше угла трения в механизме, поэтому осевая сила, создаваемая пружиной 25, стремится повернуть кулачок в обратном направлении. Шарик фиксатора 32 входит в паз 33, удерживая рычаг 31 и противодействуя таким образом усилию пружины 25.
Для возвращения трансмиссии в штатный режим работы клапаны 41 и 42 (клапан 43 в другом варианте реализации предлагаемого изобретения) перекрывают. Рычажно-кулачковый привод возвращают в исходное положение вручную или посредством дистанционного механического привода. Если привод в момент возвращения трансмиссии в штатный режим остался во втором промежуточном положении, то, при перемещении плунжера вправо от второго промежуточного положения посредством гидроцилиндра последний преодолевает силу удержания фиксатора 32. Последующее перемещение большого центрального колеса 2 вызывает поворот кулачка 26 вокруг оси вала 28 в обратном направлении, а пружина 30 прижимает кулачок верхней стороной к передней половине корпуса. Как только верхняя фаска 34 кулачка 26 достигает кромки выемки 29, направленная вдоль оси вала 28 сила пружины 30 вызывает доворот и утапливание кулачка 26, переводя рычажно-кулачковый привод в исходное положение (фиг.1).
Составные части предлагаемого устройства (отдельные изобретения группы), раскрытые в описании (исполнительный гидроцилиндр двухстороннего действия, механизм пружинного центрирования, рычажно-кулачковый механизм), могут применяться в составе комбинированного привода переключения диапазонов планетарной согласующей коробки передач как по отдельности, так и вместе. Как индивидуальное, так и совместное применение изобретений из предлагаемой группы ведет к решению задачи изобретения.
Исполнительный гидроцилиндр двухстороннего действия предлагаемой конструкции позволяет сократить осевые размеры привода, поскольку в таком исполнении планетарный механизм согласующей коробки передач может быть размещен в габарите внутренней цилиндрической поверхности скольжения гидроцилиндра.
Первый механический привод (механизм пружинного центрирования) устраняет избыточную степень свободы водила в положении нейтрали в трансмиссии, а при отказе гидравлического привода принудительно возвращает привод в первое промежуточное положение.
Второй механический привод (рычажно-кулачковый механизм) в сочетании с первым механическим приводом (механизмом пружинного центрирования) устраняет избыточную степень свободы водила в положении нейтрали в трансмиссии, принудительно возвращает привод в первое промежуточное положение при отказе гидравлического привода, а также обеспечивает возможность принудительного перемещения привода во второе промежуточное положение посредством поворота приводного элемента рычажно-кулачкового механизма.
Различные варианты установки клапанов подводящих магистралях исполнительного гидроцилиндра двухстороннего действия служат для выравнивания давления в его рабочих полостях и обеспечивают работоспособность рычажно-кулачкового механизма и механизма пружинного центрирования.
Таким образом, предлагаемая группа устройств отличается малыми габаритами и массой, а также повышает живучесть трансмиссии при частичных отказах, что в полной мере решает задачу изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод трубопроводной арматуры с ручным дублером | 2022 |
|
RU2797329C1 |
| ЛИНЕЙНЫЙ ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ С ПРИВОДОМ ОТ ЭЛЕКТРОДВИГАТЕЛЯ ДЛЯ ТРЕХПОЗИЦИОННОГО КЛАПАНА | 2007 |
|
RU2350816C1 |
| МЕХАНИЗМ ПЕРЕКЛЮЧЕНИЯ ДЛЯ ПЛАНЕТАРНОЙ КОРОБКИ ПЕРЕДАЧ | 2011 |
|
RU2527608C1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ ПОРШНЕЙ В ЦИЛИНДРАХ ПОРШНЕВОГО РОТОРА ВО ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ РОТОРА И ПЕРЕДАТОЧНЫЙ МЕХАНИЗМ | 2012 |
|
RU2518136C2 |
| УДАРНАЯ ДРЕЛЬ-ШУРУПОВЕРТ | 2012 |
|
RU2591924C2 |
| Кулачковая машина с регулировочным механизмом | 2020 |
|
RU2813578C2 |
| ПРИВОД РЕМИЗОПОДЪЕМНОЙ КАРЕТКИ ТКАЦКОГО СТАНКА | 1990 |
|
RU2009282C1 |
| Линейный исполнительный механизм гидросооружений | 2021 |
|
RU2752672C1 |
| МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ПРЕРЫВИСТОЕ ВРАЩАТЕЛЬНОЕ И ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ | 1999 |
|
RU2180946C2 |
| Линейный исполнительный механизм | 2021 |
|
RU2752673C1 |





Группа изобретений относится к гидромеханическому приводу осевого перемещения согласующей планетарной передачи. Привод включает неподвижный корпус (1, 8), планетарный механизм (2, 3, 4) с одним звеном, подвижным как вдоль центральный оси (5) планетарного механизма, так и вокруг нее, исполнительный гидроцилиндр двухстороннего действия, неподвижная часть которого связана с корпусом (8), а подвижная часть (12, 13) связана с упомянутым звеном планетарного механизма посредством способного нести осевую нагрузку подшипника (17). Исполнительный гидроцилиндр характеризуется тем, что цилиндрические поверхности скольжения неподвижной части (1, 8, 9) выполнены внутренними. Сопряженные с ними цилиндрические поверхности скольжения подвижной части (12, 13) выполнены внешними. Диаметр срединных поверхностей скольжения меньше диаметров крайних цилиндрических поверхностей скольжения, а в подвижной части выполнено сквозное цилиндрическое отверстие, соосное с цилиндрическими поверхности скольжения. Механизм центрирования привода линейного перемещения в первом промежуточном положении включает первый пружинный механизм (22, 23, 24) и второй пружинный механизм (25). Рычажно-кулачковый механизм для перемещения привода из первого промежуточного положения во второе промежуточное положение включает кулачок (26) и приводной элемент (27), закрепленные на общем валу (28) и выполненные таким образом, что вал (28) может совершать как вращательное движение вокруг своей оси, так и поступательное движение вдоль этой оси, а кулачок выполнен с возможностью соприкосновения с подвижной частью (2) привода. Перемещение привода из первого промежуточного положения во второе промежуточное положение осуществляется при повороте приводного элемента (27) и вала (28) вокруг своей оси. Достигается снижение габаритов, массы и повышение живучести трансмиссии. 3 н. и 22 з.п. ф-лы, 7 ил.
1. Исполнительный гидроцилиндр двухстороннего действия, включающий неподвижную и подвижную части, на неподвижной части выполнены три соосные цилиндрические поверхности скольжения - срединная и две крайние, расположенные по обе стороны от срединной и соединенные между собой двумя торцевыми поверхностями, на подвижной части выполнены три соосные цилиндрические поверхности скольжения -срединная и две крайних, расположенных по обе стороны от срединной и соединенных между собой двумя торцевыми поверхностями, каждая из трех цилиндрических поверхностей скольжения неподвижной части сопрягается с соответствующей цилиндрической поверхностью скольжения подвижной части, указанные поверхности и их сопряжения образуют две замкнутые кольцевые полости, каждая из которых соединена с подводящей магистралью, отличающийся тем, что цилиндрические поверхности скольжения неподвижной части выполнены внутренними, сопряженные с ними цилиндрические поверхности скольжения подвижной части выполнены внешними, причем диаметр срединных поверхностей скольжения меньше диаметров крайних цилиндрических поверхностей скольжения, а в подвижной части выполнено сквозное цилиндрическое отверстие, соосное с цилиндрическими поверхности скольжения.
2. Исполнительный гидроцилиндр двухстороннего действия по п.1, отличающийся тем, что диаметры крайних внешних цилиндрических поверхностей скольжения подвижной части гидроцилиндра равны между собой, а диаметры крайних внутренних цилиндрических поверхностей скольжения неподвижной части гидроцилиндра также равны между собой.
3. Исполнительный гидроцилиндр двухстороннего действия по п.1, отличающийся тем, что на одной из цилиндрических поверхностей скольжения в каждой из трех сопрягающихся пар выполнены подвижные радиальные контактные уплотнения.
4. Исполнительный гидроцилиндр двухстороннего действия по п.1, отличающийся тем, что торцевые поверхности подвижной и неподвижной частей гидроцилиндра выполнены плоскими.
5. Исполнительный гидроцилиндр двухстороннего действия по п.1, отличающийся тем, что торцевые поверхности подвижной и неподвижной частей гидроцилиндра выполнены коническими.
6. Исполнительный гидроцилиндр двухстороннего действия по п.1, отличающийся тем, что в торцевых поверхностях подвижной и неподвижной частей гидроцилиндра соосно выполнено сквозное отверстие, ось которого параллельна общей оси цилиндрических поверхностей скольжения и в котором размещена пустотелая втулка, причем упомянутая втулка закреплена неподвижно и герметично в подвижной части, а сопряжение втулки с отверстием в перегородке неподвижной части гидроцилиндра содержит подвижное радиальное контактное уплотнение.
7. Исполнительный гидроцилиндр двухстороннего действия по п.6, отличающийся тем, что пустотелая втулка выполнена из ферромагнитного материала, а в полости пустотелой втулки размещен чувствительный элемент неподвижно закрепленного на корпусе бесконтактного датчика линейного перемещения подвижной части гидроцилиндра.
8. Исполнительный гидроцилиндр двухстороннего действия по п.1, отличающийся тем, что отверстия для подвода и отвода текучей среды выполнены в верхней части торцевых поверхностей перегородки, причем вдоль окружности перегородки выполнены два изолированных друг от друга канала, а в верхней части перегородки каждый из упомянутых каналов сообщается с соответствующим отверстием в торцевой поверхности перегородки, а в нижней части перегородки каждый из упомянутых каналов сообщается с соответствующей подводящей магистралью.
9. Исполнительный гидроцилиндр двухстороннего действия по п.1, отличающийся тем, что подвижная часть выполнена разъемной с, по меньшей мере, одной плоскостью разъема, причем плоскость разъема проходит через границу срединной внешней цилиндрической поверхности скольжения и одной из торцевых поверхностей подвижной части.
10. Исполнительный гидроцилиндр двухстороннего действия по п.1, отличающийся тем, что неподвижная часть гидроцилиндра выполнена разъемной с, по меньшей мере, одной плоскостью разъема, причем плоскость разъема проходит через границу одной из крайних внутренних цилиндрических поверхностей скольжения и примыкающей к ней торцевой поверхности перегородки.
11. Исполнительный гидроцилиндр двухстороннего действия по п.1, отличающийся тем, что между подводящих магистралей выполнен перепускной клапан любого типа с механическим приводом.
12. Механизм центрирования привода линейного перемещения, включающий неподвижный корпус, закрепленный на нем первый пружинный механизм с ограниченным ходом отбоя, воздействующий на подвижную часть привода в прямом направлении его перемещения на части полного хода, и закрепленный на корпусе второй пружинный механизм, воздействующий на подвижную часть привода в обратном направлении его перемещения на полном ходу, отличающийся тем, что первый пружинный механизм включает, по меньшей мере, одну пружину сжатия с толкателем, головка которого в пределах рабочего хода первого пружинного механизма контактирует с частью привода, совершающей, помимо поступательного движения, независимое вращательное движение таким образом, что сила трения головки толкателя об эту часть привода создает тормозной момент, препятствующий ее вращению.
13. Механизм центрирования привода линейного перемещения по п.12, отличающийся тем, что второй пружинный механизм включает одну центральную пружину, а первый пружинный механизм включает несколько пружин с толкателями, оси которых расположены по окружности, равноудаленной от оси центральной пружины второго пружинного механизма.
14. Механизм центрирования привода линейного перемещения по п.12, отличающийся тем, что он дополнительно содержит рычажно-кулачковый механизм для перемещения привода из первого промежуточного положения во второе промежуточное положение, включающий, по меньшей мере, один кулачок и один приводной элемент, закрепленные на общем валу и выполненные таким образом, что указанный вал может совершать как вращательное движение вокруг своей оси, так и поступательное движение вдоль этой оси, а кулачок выполнен с возможностью соприкосновения с подвижной частью привода линейного перемещения, причем перемещение привода из первого промежуточного положения во второе промежуточное положение осуществляется при повороте упомянутого приводного элемента и вала вокруг своей оси.
15. Механизм центрирования привода линейного перемещения по п.14, отличающийся тем, что в неподвижном корпусе выполнена, по меньшей мере, одна выемка по форме кулачка рычажно-кулачкового механизма, в которой этот кулачок утоплен в нерабочем положении рычажно-кулачкового механизма.
16. Механизм центрирования привода линейного перемещения по п.15, отличающийся тем, что рычажно-кулачковый механизм включает пружину, удерживающую кулачок утопленным в выемку неподвижного корпуса в нерабочем положении рычажно-кулачкового механизма.
17. Механизм центрирования привода линейного перемещения по п.15, отличающийся тем, что выемка неподвижного корпуса имеет наклонные стенки, а ближняя к корпусу кромка кулачка имеет фаску по контуру в местах возможного соприкосновения с наклонными стенками выемки таким образом, что при приложении крутящего момента со стороны приводного элемента рычажно-кулачкового механизма на утопленный кулачок действует сила, приводящая к выдвиганию кулачка из выемки неподвижного корпуса.
18. Механизм центрирования привода линейного перемещения по п.14, отличающийся тем, что дальняя от корпуса кромка кулачка имеет фаску по контуру в местах возможного соприкосновения с подвижной частью привода линейного перемещения, а подвижная часть привода имеет соответствующую наклонную поверхность в местах возможного соприкосновения с кулачком таким образом, что при приложении к приводу линейного перемещения силы на выдвинутый кулачок действует сила, приводящая к утапливанию кулачка в выемке неподвижного корпуса.
19. Механизм центрирования привода линейного перемещения по п.14, отличающийся тем, что рычажно-кулачковый механизм включает пружинный фиксатор, удерживающий приводной элемент во втором промежуточном положении привода линейного перемещения с заданной предельной силой, превышающей силу противодействия второго пружинного механизма, а форма сопрягающихся поверхностей и угол поворота кулачка в этом положении обеспечивают возможность обратного перемещения привода из второго промежуточного положения в первое промежуточное положение при превышении заданной предельной силы без заклинивания рычажно-кулачкового механизма.
20. Механизм центрирования привода линейного перемещения по п.14, отличающийся тем, что приводной элемент рычажно-кулачкового механизма выполнен в виде рычага ручного управления, размещенного непосредственно на корпусе трансмиссии.
21. Механизм центрирования привода линейного перемещения по п.14, отличающийся тем, что приводной элемент рычажно-кулачкового механизма выполнен в виде рычага, соединенного с приводом дистанционного управления.
22. Механизм центрирования привода линейного перемещения по п.14, отличающийся тем, что рычажно-кулачковый механизм включает несколько кулачков с приводными элементами, закрепленных каждый на своем валу.
23. Механизм центрирования привода линейного перемещения по п.22, отличающийся тем, что он содержит механизм синхронизации поворота кулачков рычажно-кулачкового механизма.
24. Привод, включающий неподвижный корпус, планетарный механизм с, по меньшей мере, одним звеном, подвижным как вдоль центральный оси планетарного механизма, так и вокруг нее, отличающийся тем, что он содержит исполнительный гидроцилиндр двухстороннего действия, неподвижная часть которого связана с корпусом, а подвижная часть связана с упомянутым звеном планетарного механизма посредством способного нести осевую нагрузку подшипника, причем составные части привода могут включать признаки любого из пп.1-23.
25. Привод по п.24, отличающийся тем, что в каждой подводящей магистрали исполнительного гидроцилиндра двухстороннего действия выполнен сливной клапан любого типа с механическим приводом.
| МНОГОДИАПАЗОННАЯ БЕССТУПЕНЧАТАЯ ТРАНСМИССИЯ (ВАРИАНТЫ) | 2010 |
|
RU2460919C2 |
| Механизм переключения передач для трансмиссии машин | 1959 |
|
SU125148A1 |
| Лабораторный экстракционный прибор | 1925 |
|
SU13010A1 |
| Механизм переключения передач | 1977 |
|
SU709414A1 |
| US 2009078071 A1, 26.03.2009 | |||

